格网模型 1
第9章-数字地形模型与地形分析-第一讲

▪ DEM数据的高程分层设色显示 ▪ DEM数据与影像数据联结三维场景显示 ▪ 三维静态场景的输出功能 ▪ 三维动态飞行场景的录制与播放功能 ▪ 简单DEM模型分析功能
GIS 电子沙盘 ——高程分层设色
GIS DEM应用举例 ——城市景观
城市景观系统通过运用数字技术构造出某一区域的 虚拟场景来辅助人们进行观测, 是一个可视现实和虚拟 现实集成的系统。
垂直线 典型线
山脊线 谷底线 海岸线 坡度变换线
GIS 3.DEM的表示法
数学方法 整体拟合方法, 即根据区域所有的高程点
数据, 用傅立叶级数和高次多项式拟合统 一的地面高程曲面 局部拟合方法, 将地表复杂表面分成正方 形规则区域或面积大致相等的不规则区 域进行分块搜索, 根据有限个点进行拟合 形成高程曲面
➢DEM的表示方法
➢一个地区的地表 高程的变化可以
采用多种方法表
达
DEM 表示方法
➢用数学定义的表 面或点、线、影 像都可用来表示 DEM
数学方法 图形法
整体 局部 点数据
线数据
傅立叶级数 高次多项式
规则数学分块
不规则数学分块
密度一致
规则
密度不一致
不规则 典型特征 水平线
三角网 邻近网 山峰、洼坑
隘口、边界
点信息
ID
边1 边2 边3
1
E1
E3
E9
2
E2
E3
E4 面
3
E4
E5
E6
信 息
4
E6
E7
E8
5
E7
E9
E10
ID
起点
终点
左多 边形
右多 边形
数值模拟基础及技术方法ppt课件

ppt精选版
求实 创新 超越
REALITY,INNOVATION,TRANSCENDENCY
29
四、网格模型格块属性
ppt精选版
定义网格模型格块属性
30
网格模型格块属性
•描述各网格格块的大小尺寸和深度的参数称为几何参数。 •用来指定几何参数的关键字是:对于笛卡儿网格是TOPS,DX(或 DXV),DY(或DYV);对于径向网格是TOPS,DR(或DRV),DTHETA (或DTHETAV)和DZ;对于角点网格是COORD和ZCORN。 •描述孔隙度、渗透率的参数称为属性参数。 •描述属性的参数是:PORO(),PERMX(Kx),PERMY(Ky), PERMZ(Kz)。 •净厚比可以用关键字NTG(净厚比率)或DZNET(净厚度)来定义。 •用来显式定义一个网格是否是有效网格的关键字是ACTNUM。对于无 效网格,此值为0;对于有效网格则有一个统一的值。
战略地位 不确定性 资金密集
复杂性 高 高 高 未知性 风 技 效 间接性 险 术 益 一次性
仿真工具
ppt精选版
6
2、各种仿真工具优缺点
仿真工具
•室 内 实 验 •矿 场 试 验 •数 值 模 拟
周 期
相 似 性
费 用
重 复 性
代 表 性
短
好
低
一
次
差
长
好
高
一
次
中
短
好
低
无 限
好
ppt精选版
网格数据读取规则
•对于3D网格,网格块和节点是按照从左到右,从后到前,从 上到下的顺序排列的。 •网格的起始点并不是一定要从网格块(1,1,1)开始。 •X,Y,Z轴并不是一定要与I,J,K方向平行。
不规则三角网(TIN)

不规则三角网(TIN)Ⅰ 数字高程模型(DEM)地球表面高低起伏,呈现一种连续变化的曲面,这种曲面无法用平面地图来确切表示。
于是我们就利用一种全新的数字地球表面的方法——数字高程模型的方法,这种方法已被普遍广泛采用。
数字高程模型即DEM(Digital Elevation Model),是以数字形式按一定结构组织在一起,表示实际地形特征空间分布的模型,也是地形形状大小和起伏的数字描述。
DEM有三种主要的表示模型:规则格网模型,等高线模型和不规则三角网。
格网(即GRID)DEM在地形平坦的地方,存在大量的数据冗余,在不改变格网大小情况下,难以表达复杂地形的突变现象,在某些计算,如通视问题,过分强调网格的轴方向。
不规则三角网(简称TIN,即Triangulated Irregular Network)是另外一种表示数字高程模型的的方法(Peuker等,1978),它既减少了规则格网带来的数据冗余,同时在计算(如坡度)效率方面又优于纯粹基于等高线的方法。
不规则三角网能随地形起伏变化的复杂性而改变采样点的密度和决定采样点的位置,因而它能够避免地形起伏平坦时的数据冗余,又能按地形特征点如山脊,山谷线,地形变化线等表示数字高程特征。
Ⅱ TIN的基本知识在TIN中,满足最佳三角形的条件为:尽可能的保证三角形的三个角都是锐角,三角形的三条边近似相等,最小角最大化。
TIN 是基于矢量的数字地理数据的一种形式,通过将一系列折点(点)组成三角形来构建。
形成这些三角形的插值方法有很多种,例如Delaunay 三角测量法或距离排序法。
ArcGIS 支持Delaunay 三角测量方法。
TIN 的单位是英尺或米等长度单位,而不是度分秒。
当使用地理坐标系的角度坐标进行构建时,Delaunay 三角测量无效。
创建TIN 时,应使用投影坐标系(PCS)。
TIN 模型的适用范围不及栅格表面模型那么广泛,且构建和处理所需的开销更大。
获得优良源数据的成本可能会很高,并且,由于数据结构非常复杂,处理TIN 的效率要比处理栅格数据低。
地理信息系统

一、名词解释(10小题,每小题3分,共30分)。
1.地理信息系统(GIS):是在计算机软、硬件系统支持下,对整个或部分地球表层(包括大气层)的有关地理分布数据进行采集、储存、管理、运算、分析、显示和描述的技术系统。
简言之,地理信息系统是对空间数据进行采集、编辑、存储、分析和输出的计算机信息系统。
2.地理信息:是指表征地理圈或地理环境固有要素或物质的数量、质量、分布特征、联系和规律等的数字、文字、图像和图形等的总称。
3.地理数据:是以地球表面空间位置为参照,描述自然、社会和人文景观的数据。
4.不规则三角网模型(TIN):简称TIN,它根据区域有限个点集将区域划分为相连的三角面网络,区域中任意点落在三角面的顶点、边上或三角形内。
5.拓扑关系:指网结构元素结点、弧段、面域之间的空间关系。
6.拓扑结构:指在点、线和多边形之间建立关联,以及彻底解决邻域和岛状信息处理问题而必须建立的数据结构。
7.空间数据结构:是指适合于计算机系统存储、管理和处理的地学图形的逻辑结构。
8.矢量数据结构:是利用几何学中的点、线、面及其组合体来表示地理实体空间分布的一种数据组织方式。
9.栅格数据结构:指将空间分割成有规则的网络,在各个网格上给出相应的属性值来表示地理实体的一种数据组织形式。
10.空间数据编码:指将数据分类的结果用一种易于被计算机和人识别的符号系统表示出来的过程。
11. Delaunay三角网:即由狄洛尼三角形组成的三角网,狄洛尼三角形有三个最邻近的点连接而成,这三个相邻点对应的V oronoi多边形有一个公共的顶点,此顶点同时也是狄洛尼三角形外接圆的圆心。
12. V oronoi多边形:由连接两邻点直线的垂直平分线组成的连续多边形组成的图形。
13.坐标变换:采用一定的数学方法将一种坐标系的坐标变换为另一种坐标系的坐标的过程。
14.数据精度:是考察数据质量的一个方面,即对现象描述的详细程度。
15.空间数据库:是地理信息系统在计算机物理存储介质上存储的与应用相关的地理空间数据的总和。
第13讲 网格模型

第十三讲网格模型一. 慨述怎样将现实中的一个物体,比如,一只花瓶,一个足球,甚至一架大的战斗机,在电脑屏幕上显示呢?我们一般会这样做:1. 先把该物体放在一个虚拟的三维坐标系中,该坐标称为局部坐标系(Local Space), 一般以物体的中心作为坐标原点,采用左手坐标系。
2. 然后,对坐标系中的物体进行点采样(Point Sample), 这些采样点按一定顺序连接成为一系列的小平面(三角形或共面的四边形,五边形等),这些小平面称为图元(Primitive), 3D 引擎会处理每一个图元,称为一个独立的渲染单位。
这样取样后的物体看起来像是由许许多多的三角形,四边形或五边形组成的,就像网一样,我们称为一个网格(Mesh).这个采样过程又可称为物体的3D建模。
当然现在都有功能非常强大的3D建模工具,例如,3D Max, 3D Cool等建模工具,省去了我们这方面的许多工作。
3. 我们纪录这些顶点数据和连线情况到一个文件中,3D引擎读取这些数据,依次渲染每一个图元,就能在显示屏幕上再现物体。
当然了,取样的点越多,再现的物体也会越逼真,要处理的数据量也越大。
二. D3D中的网格(Mesh)1、子集和属性缓存网格模型都由一个或多个子集(subset)组成,其中每个子集都具有一组相同材质、纹理和绘制状态等属性的三角形集合。
为了区分网格中的不同子集,每个子集都被指定了一个唯一的属性ID,而且网格中的每个三角形也被指定了该三角形所属子集的属性ID。
在mesh中的每个三角形都与一个属性ID相关联,表示该三角形属于该子集。
例如,上图中组成地板的三角形具有属性ID0,它表示这些三角形属于子集0。
同样,组成墙的三角形具有属性ID1,它表示这些三角形属于子集1。
三角形的属性ID存储在mesh的属性缓存中,它是一个DWORD数组。
因为每个面对应属性缓存中的一项,所以属性缓存中的项目数等于mesh中的面的个数。
属性缓存中的项目和索引缓存中定义的三角形一一对应。
DEMDOMDLG生产流程
1.数字立体摄影测量生产DLG方法
航摄负片
象片参数
象片扫描
控制点坐标
象对定向
立体测绘地物
脱机编辑
符号化 与制图整饰
矢量数据库建库 绘图或刻盘 质量检测与元数据文件 记录
2.地图扫描矢量化或手扶跟踪数字化
地图扫描矢量化或手扶跟踪数字化 地图扫描矢量化或手扶跟踪数字化技术 还比较成熟,作业流程如下:
全要素地形图
等高线版地形图
地图扫描 人机交互等高线矢量化 加测注记点
地图扫描 等高线自动矢量化 加测注记点
等高线高程赋值与检查
周边等高线地图的数据获取
构造三角网
内插DEM格网
DEM建库与刻盘
质量检测与元数据文件记录
二、数字正射影像的生产流程
数字正射影像的生产根据不同的数据源 和不同的设备有下面几种生产工艺。 1.全数字摄影测量方法 与前面所述的全数字自动摄影测量和 交互式数字摄影测量方法相一致,由数字 摄影测量工作站直接生成数字正射影像, 工艺流程如下:
第二种是点栅格观点:认为该网格单元 的数值是网格中心点的高程或该网格单 元的平均高程值,这样就需要用一种插 值方法来计算每个点的高程。
规则格网的优点:
数据结构简单,很容易地用计算机 进行处理,特别是栅格数据结构的 地理信息系统。 很容易地计算等高线、坡度坡向、 山坡阴影和自动提取流域地形,使 得它成为DEM最广泛使用的格式。
遥感数据
控制点坐标
数字影象几何纠正
数字影象处理与融合
数字影象镶嵌
地名注记与 图廓整饰 数字正射影象 数据库 绘图或刻盘 质量检测与 元数据文件记录
三、数字线划图(矢量型)的生产工艺
Moldex3D模流分析之Solid网格模型-快速范例教学
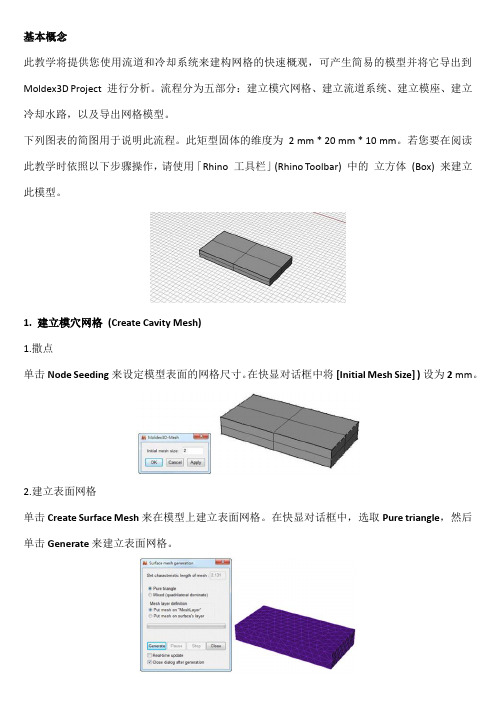
基本概念此教学将提供您使用流道和冷却系统来建构网格的快速概观,可产生简易的模型并将它导出到Moldex3D Project 进行分析。
流程分为五部分:建立模穴网格、建立流道系统、建立模座、建立冷却水路,以及导出网格模型。
下列图表的简图用于说明此流程。
此矩型固体的维度为 2 mm * 20 mm * 10 mm。
若您要在阅读此教学时依照以下步骤操作,请使用「Rhino 工具栏」(Rhino Toolbar) 中的立方体(Box) 来建立此模型。
1. 建立模穴网格(Create Cavity Mesh)1.撒点单击Node Seeding来设定模型表面的网格尺寸。
在快显对话框中将[Initial Mesh Size] )设为2mm。
2.建立表面网格单击Create Surface Mesh来在模型上建立表面网格。
在快显对话框中,选取Pure triangle,然后单击Generate来建立表面网格。
2. 建立流道系统(Create Runner System)1.描绘流道的线条单击多重直线(Polyline)来描绘定义流道配置的线形对象。
2.指定流道属性单击Attribute Setting来设定流道的直径。
在Attribute下拉式清单中选取Cold Runner。
将正面直径设为 1 mm,背面直径设为 2 mm。
然后单击OK来完成设定。
结果显示如下。
3.描绘代表进浇点的点单击单点(Point)来描绘流道线条末端的点。
4.指定进浇点的属性单击Attribute Setting来将点的属性设为进浇点(Melt Entrance)。
5.建立流道实体网格单击Create Runner System Mesh来建立流道的实体网格。
3. 建立模穴实体网格(Create Cavity Solid Mesh)建立塑件的tetra 实体网格单击[Create Tetra ]来建立塑件的四面体实体网格。
在快显对话框中,将其属性设为[Cavity (Part ) Solid Mesh]。
测绘名词解释
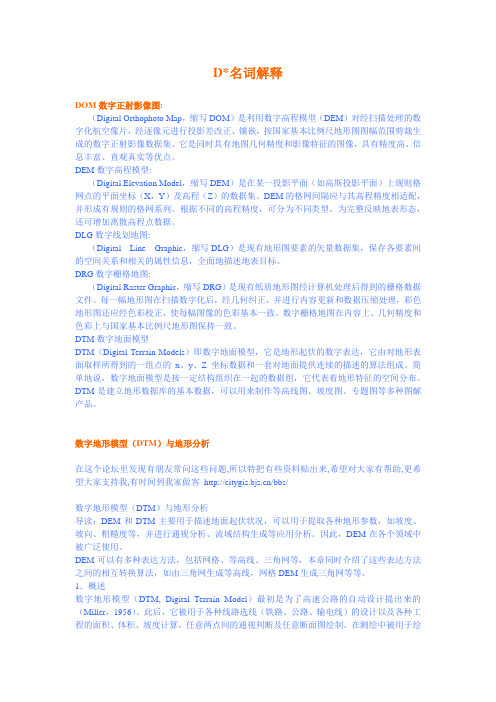
D*名词解释DOM数字正射影像图:(Digital Orthophoto Map,缩写DOM)是利用数字高程模型(DEM)对经扫描处理的数字化航空像片,经逐像元进行投影差改正、镶嵌,按国家基本比例尺地形图图幅范围剪裁生成的数字正射影像数据集。
它是同时具有地图几何精度和影像特征的图像,具有精度高、信息丰富、直观真实等优点。
DEM数字高程模型:(Digital Elevation Model,缩写DEM)是在某一投影平面(如高斯投影平面)上规则格网点的平面坐标(X,Y)及高程(Z)的数据集。
DEM的格网间隔应与其高程精度相适配,并形成有规则的格网系列。
根据不同的高程精度,可分为不同类型。
为完整反映地表形态,还可增加离散高程点数据。
DLG数字线划地图:(Digital Line Graphic,缩写DLG)是现有地形图要素的矢量数据集,保存各要素间的空间关系和相关的属性信息,全面地描述地表目标。
DRG数字栅格地图:(Digital Raster Graphic,缩写DRG)是现有纸质地形图经计算机处理后得到的栅格数据文件。
每一幅地形图在扫描数字化后,经几何纠正,并进行内容更新和数据压缩处理,彩色地形图还应经色彩校正,使每幅图像的色彩基本一致。
数字栅格地图在内容上、几何精度和色彩上与国家基本比例尺地形图保持一致。
DTM数字地面模型DTM(Digital Terrain Models)即数字地面模型,它是地形起伏的数字表达,它由对地形表面取样所得到的一组点的x、y、Z坐标数据和一套对地面提供连续的描述的算法组成。
简单地说,数字地面模型是按一定结构组织在一起的数据组,它代表着地形特征的空间分布。
DTM是建立地形数据库的基本数据,可以用来制作等高线图、坡度图、专题图等多种图解产品。
---------------------------------数字地形模型(DTM)与地形分析在这个论坛里发现有朋友常问这些问题,所以特把有些资料贴出来,希望对大家有帮助,更希望大家支持我,有时间到我家做客/bbs/数字地形模型(DTM)与地形分析导读:DEM和DTM主要用于描述地面起伏状况,可以用于提取各种地形参数,如坡度、坡向、粗糙度等,并进行通视分析、流域结构生成等应用分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.4.2格网电离层模型
广域增强系统(WAAS)是由美国航空航天局为提高GPS 卫星导航系统在本地区的位置服务精度与可靠性而提出并且成功实施运行的系统,WAAS 建议采用格网电离层模型,其能够为单频接收机用户提供大范围、实时与精确的电离层延迟误差改正。
WAAS 把复杂的电离层视为距离地面约350公里的薄层,并把它作为地面站点及用户接收机共同的参考面。
并将电离层参考面按55⨯的间隔划分成大量的网格单元。
在广域增强系统的覆盖范围内分布着一定数目的基准观测站以及一个主控站,各基准观测站根据观测到的GPS 资料,实时地分离出卫星和接收机的仪器偏差与电离层延迟数据,然后提取出各电离层穿刺点处的精确垂向电离层延迟数据信息;主控站整合网络覆盖区域内所有观测基准站所有可视卫星的电离层穿刺点处的精确电离层TEC 信息,并通过一定的算法计算出电离层参考面上所有网格结点处的电离层垂向总电子含量(VTEC),建立覆盖整个网络服务区的电离层格网模型,并分析格网模型的模型精度;主控站再将所有网格结点的电离层延迟数据以一定格式生成电文经由GEO 卫星播发给服务区域内的用户,用户接收机首先计算各可视卫星穿刺点的位置坐标,根据各穿刺点落入的网格单元所对应的GEO 卫星播发的格网点电离层延迟信息,按照一定算法解算出各可视卫星伪距观测中的电离层延迟误差量[26,36-37]。
(1)网格结点电离层的解算[38]
广域增强系统主控站首先接收其网络覆盖区域内的所有观测基准站发送的实时电离层延迟误差信息,其中包括所有基准站可视卫星电离层穿刺点的位置坐标及各穿刺点的电离层VTEC 信息,然后采用距离反比例加权算法解算出WAAS 整个网络覆盖区域内的所有网格结点的VTEC 值。
距离反比例加权法是基于空间相关性原理而来的,根据距离的远近赋予不同的权重系数,即所测穿刺点距离该格点越近权重值越大,越远权重值越小,然后整合相应格网点周围四个网格内的穿刺点VTEC 信息来估算出网格结点的垂直电离层延迟误差, 如图2.1。
计算公式如下:
111/00i n n ion ij j
i i ij ij ion i ion ij D d DR d d D D d ==⎧<<⎪=⎨⎪=⎩∑∑ (2-4-1)
-1
()cos [sin sin cos cos cos()]ij i j i j i j d R H ϕϕϕϕλλ=++- (2-4-2) 式中,DR 表示距离阈值,作用是对监测站数据进行筛选;(,)i i ϕλ为格网点
i 的地理经纬度;(,)j j ϕλ为穿刺点j 的地理经纬度;R 为地球半径,H 为电离层单层模型高度。
图2.1 主控站网格点算法示意图
(2)用户穿刺点电离层的解算
WAAS 系统中的用户计算电离层延迟的方法与主控站和基准站的算法相似,不同的是最终电离层延迟误差的获取是来自于对同步卫星广播电离层延迟数据的内插。
具体流程如下:
1) 确定可视卫星电离层穿刺点位置,其中用户的位置由用户接收机提供概略位置,但并不影响电离层延迟误差的解算。
基本公式,参考文献38.
2) 用户电离层穿刺点垂直延迟误差的获取
虽然用户接收机可以接收到来自同步卫星转发的WAAS 网格点的垂直电离层延迟数据,然而对于用户来说,其所有的电离层穿刺点不可能同时或时刻都在网格结点上,所以需要利用广播的电离层延迟数据对各个穿刺点进行内插解算。
内插法的一般公式为
1(,)n V
V u i u u
i i T W x y T ==∑ (2-4-3)
式中,V u T 为待求值;(,)i u u W x y 为加权函数;,u u x y 为待求点位置的函数;n
为参加计算的已知点的个数;V i T 为已知的边界条件。
加权函数(,)W x y 有很多种不同的表达形式。
其中最为常用的的三种:双线性加权法、距离倒数加权和Junkins 加权法。
Junkins 法与倒数法相比较而言,接收机的计算负荷不高,和双线性法相比来说,Junkins 的空间相关性更强,要强调的一点是其为WAAS 文件规范中所推荐的方法,所以本文在对用户电离层穿刺点进行电离层解算时采用Junkins 法。
Junkins 的权函数计算公式为
22(,)(,)(9664)W x y f x y x y x y xy ==--+ (2-4-4) 计算矩形四点加权时的加权函数为
1234(,)(,)
(,)(1,)
(,)(1,1)
(,)(,1)W x y f x y W x y f x y W x y f x y W x y f x y ==-=--=- (2-4-5)
矩形内插法的计算公式为
4
1(,)(,)V
IPP IPP IPP i IPP IPP Gi i I W x y I ϕλ==∑ (2-4-6)
式中,V IPP I 为待求点(穿刺点)的垂直电离层延迟;,IPP IPP ϕλ为穿刺点的纬度和经度;(,)i IPP IPP W x y 为Junkins 加权函数;,IPP IPP x y 为电离层穿刺点位置与相关网格结点的位置的函数;Gi I 为网格结点的电离层垂直延迟误差量,通过导航电文播发而来。
,IPP IPP x y 的计算如图2.2所示,
21
IPP IPP x λλλ∆=- (2-4-7) 21IPP IPP y ϕϕϕ∆=
- (2-4-8) 1IPP IPP λλλ∆=- (2-4-9) 1IPP IPP ϕϕϕ∆=- (2-4-10) 1λ,2λ,1ϕ,2ϕ,IPP λ∆,IPP ϕ∆的含义如图所示。
图2.2 IPP x ,IPP y 的计算示意图。