基于牛顿-欧拉法的3-UPS/S并联机构动力学分析
并联机构动力学分析及控制策略研究
并联机构动力学分析及控制策略研究一、引言在机械系统中,机构是运动的基础。
机构的特性与性能对机器人和自动化系统的运动控制有着至关重要的影响。
在众多的机构中,并联机构是一种典型的高机动性机构,在机器人、飞行器以及自动化设备等领域得到了广泛应用。
本文将介绍并联机构动力学分析及控制策略的研究现状和发展方向。
二、并联机构动力学分析方法1.拉格朗日动力学方法拉格朗日动力学方法是一种经典的机械动力学分析方法,可以解决复杂机构的运动和动力学问题。
在分析并联机构时,可以通过拉格朗日方程建立并联机构的运动方程。
利用拉格朗日方程可以得到并联机构的运动学方程和动力学方程,从而实现机构的动力学分析。
2.牛顿-欧拉动力学方法牛顿-欧拉动力学方法是一种相对直观的机构分析方法,也被广泛应用于并联机构的动力学分析。
利用牛顿-欧拉法可以得到并联机构的动力学方程,通过求解方程可以得到并联机构的动态响应。
相对于拉格朗日动力学方法,牛顿-欧拉动力学方法需要更多的运动学参数,但是计算量要小得多。
三、并联机构的控制策略1. 基于模型的控制策略基于模型的控制策略是一种常用的控制方法,包括反馈控制、前馈控制、模型预测控制等。
这些方法都需要对机构的动力学方程进行建模,通过数学方法求解系统的控制器,从而实现控制效果。
但是这种方法必须先对系统动力学模型进行精确建模,否则控制效果会受到影响。
2. 基于学习的控制策略基于学习的控制策略是一种新兴的控制方法,它通过系统和环境的交互,自适应地学习控制器的参数。
这种控制方法基于强化学习、遗传算法等理论,对于复杂的机构控制效果非常好。
但是基于学习的控制方法需要大量的数据训练,较难应用于实际控制场景。
四、并联机构的控制应用并联机构的控制应用涵盖了多种领域,如自动化控制、机器人、航空航天等。
在这些领域中,人们需要通过对机构的控制来实现对设备的高精度部件加工、复杂任务执行和高速运动控制等。
因此,对并联机构的控制研究,对于各种自动化设备的设计、开发和应用具有重要意义。
3—PUU并联机构的运动学分析
3—PUU并联机构的运动学分析本文对3-PUU并联机构进行位置分析,求解出3-PUU并联机器人的运动学正解和运动学逆解,正解要比逆解复杂难求。
通过求解雅可比矩阵,推导出该机构的奇异位形位置,为动平台的轨迹规划奠定了基础。
用极限边界搜索法求得3-PUU并联机构的工作空间。
标签:3-PUU;运动学分析;奇异位形1.自由度的计算在三维空间直角坐标系中,n活动构件共有6(n-1)个自由度。
在3-PUU 并联机构中,令约束数目为g,第i个运动副的约束数目为ui,则该机构的自由度数目为:3.雅克比矩阵和奇异位形在向量微积分中,雅可比矩阵是一阶偏导数以一定方式排列成的矩阵,其行列式称为雅克比行列式。
并联机构的雅克比矩阵可以判断机构的奇异位形、进行误差分析、轨迹规划等。
机构学中所说的奇异位形被称作特殊位形,指的是机构运动到某一特殊位置。
机构的奇异位形决定了机器人的运动、受力、控制以及精度等诸方面的性能,因此对并联机构的奇异位形做深入研究有很重要的实际意义。
[1]研究奇异位形可以减少和消除奇异位形对机构运动的影响,从而进一步提高并联机构的运动性能,促进并联机构产品的实用化,使并联机构产品得到更广泛的发展。
研究并联机构的奇异位形主要采用代数法。
代数法就是求得的雅克比矩阵的行列式的值为0时,该机构处于奇异位置,机构丧失一个或者多个自由度。
该机构的雅克比矩阵为:4.并联机构的工作空间并联机构相比于串联机构而言,具有刚度大、惯性低等特点,但对其工作空间有严格的要求。
工作空间是衡量并联机器人性能的重要指标之一。
并联机构的工作空间分为灵巧工作空间和可达工作空间两种类型。
灵巧工作空间指的是在操作手臂上某一参考点可以从任何方向到达的位置点的集合。
可达工作空间指的是操作手臂上某一参考点可以达到的位置点的集合,不必考虑操作器的姿态。
求解并联机构的工作空间一般采用数值法和解析法。
极限边界搜索法属于数值法当中的一种。
它的基本原理是:给出一个足够大的空间范围,它包含了并联机构可能的运动范围。
基于牛顿-欧拉法的3PTT并联机构动力学分析及仿真

基于牛顿-欧拉法的3PTT并联机构动力学分析及仿真
郝秀清;胡福生;陈建涛
【期刊名称】《中国机械工程》
【年(卷),期】2006(000)0z1
【摘要】以3PTT并联机构的任一支链为研究对象,用D-H方法建立了各构件的坐标系,给出了支链运动学逆解的解析解;运用牛顿-欧拉动力学建模方法,建立了支链中构件的力和力矩平衡方程;推导出了3PTT并联机构的动力学方程,用MATLAB软件进行了理论计算,用ADAMS软件进行了动力学仿真,验证了理论计算的正确性,为3PTT类机构的动力学分析和应用奠定了基础,也为其机构的实际设计制造和应用提供了力学上的理论依据.
【总页数】5页(P32-36)
【作者】郝秀清;胡福生;陈建涛
【作者单位】山东理工大学,淄博,255049;山东理工大学,淄博,255049;山东理工大学,淄博,255049
【正文语种】中文
【中图分类】TH112
【相关文献】
1.基于牛顿欧拉法的3-RPS并联机构逆动力学分析 [J], 李永刚;宋轶民;冯志友;张策
2.基于牛顿-欧拉法的4-UPS-UPU并联机构动力学方程 [J], 陈修龙;董芳杞;王清
3.基于牛顿—欧拉法的人体下肢动力学分析与建模 [J], 张玉叶;张原园;毛少坤;张婷
4.基于牛顿-欧拉法的3-UPS/S并联机构动力学分析 [J], 印松;陈竟新;唐矫燕
5.基于牛顿欧拉法的2UPS-2RPS并联机构逆动力学分析 [J], 冯志友;张燕;杨廷力;张策
因版权原因,仅展示原文概要,查看原文内容请购买。
3(3-RPs)并-串联机构及其运动学分析研究

3(3-RPs)并-串联机构及其运动学分析研究梁辉;胡同帅;王蕾;杨加礼【期刊名称】《机电工程》【年(卷),期】2017(034)001【摘要】针对并联机构运动学和动力学性能方面存在的问题,提出了一种新结构-3(3-RPS)并-串联机构,对3(3-RPS)并-串联机构进行了运动学方面的研究,对3 (3-RPS)并-串联机构的结构特点进行了介绍,利用螺旋理论及修正的Kutzbach-Grüble公式对3(3-RPS)并-串联机构进行了自由度计算,利用机构影响系数法和螺旋理论对3(3-RPS)并-串联机构的速度和加速度进行了建模,得到了3(3-RPS)并-串联机构速度和加速度的理论模型,利用工程分析软件ADAMS和Abaqus对3(3-RPS)并-串联机构进行了运动学仿真及结构受力分析,得到了上平台在空间中的速度和加速度曲线变化图与机构的结构受力变形图.研究结果表明:3(3-RPS)并-串联机构的自由度数为9,速度和加速度值等于各层之和;本研究分析3(3-RPS)并-串联机构运动学的方法也适合其他并-串联机构.【总页数】6页(P28-32,78)【作者】梁辉;胡同帅;王蕾;杨加礼【作者单位】青岛科技大学机电工程学院,山东青岛266061;青岛科技大学机电工程学院,山东青岛266061;青岛科技大学机电工程学院,山东青岛266061;青岛科技大学机电工程学院,山东青岛266061【正文语种】中文【中图分类】TH112【相关文献】1.具有弧形移动副3-RP S并联机构的运动学分析 [J], 王永奉;范顺成;张小俊;路光达;杨静2.两种具有弧形移动副的3-RPS并联机构运动学分析 [J], 王永奉;范顺成;张小俊;路光达;杨静3.基于3-RPS并联机构的越野救护车车载平衡装置运动学分析 [J], 徐鸿佳;牛福;孟令帅;孙景工4.3-RPS并联稳定平台机构设计及运动学仿真分析 [J], 赵万卓;谢英江;孙景工;孟令帅;牛福5.空间3-RPS并联机构运动学分析 [J], 高红卫因版权原因,仅展示原文概要,查看原文内容请购买。
基于广义坐标形式牛顿-欧拉方法的3SPS+1PS并联髋关节试验机动力学研究

用牛 顿一 欧拉 法研 究 了6 一 UP S 机构 的动 力 学问题 ;陈 修 等 基于 虚功 原理 建 立4 一 UP S — UP U并联 机 器人
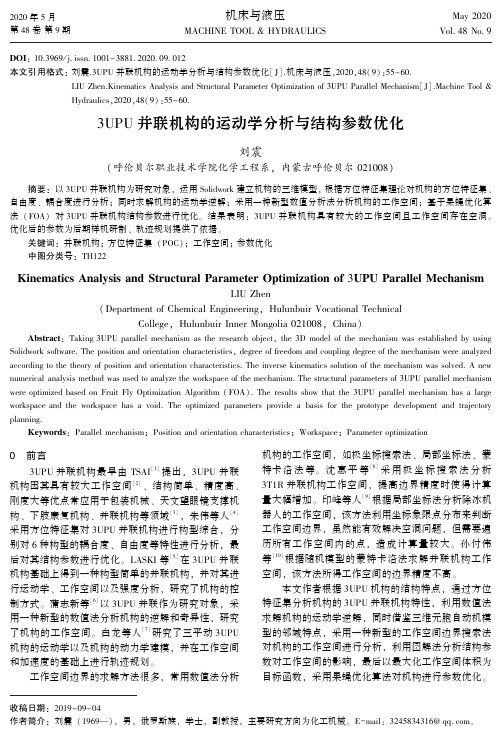
图 1 并 联 髋 关 节 试 验 机 拓 扑 图
的动 力学模 型 ,并求 解支链 的驱动 力和 力矩 。 本 文 采用 广 义 坐 标形 式 牛 顿一 欧拉 方 法 , 建立
3 S P S + 1 P S并联 机 构 的动 力学 模型 。首先 ,将 动平
= ( 2 )
台 的 工 作 空 间 变 量 定 义 为 系统 的 广 义 坐 标 ; 然
后 , 将 运 动 学逆 解 用 系统 广 义 坐标 表 示 ;最 后 , 由 各构 件 在 系统 广 义 坐标 下 的牛 顿一 欧 拉 方程 ,得 到 系统动 力学 方程 ,并 对方 程 求解分 析 。
等 = : a
= :
=
屯+
=
( 屈 ) × ( 厨 鹿) +
掣
‘ c 一 2 d t
+ 。
t
=
( 扈 ^ ) × ( 属 ) +
且 在 Z轴 方 向上 的 约束 力波 动 幅度 大 ,而 在X、Y 两 个 方 向的 力 波 动 幅 度 非 常 小 ;另 外 , 在0 . 3 S 和 O . 7 s 左 右 两个 时刻 ,动平 台 上球 副处 的 约束 力发 生 突变 ,这 是 由于机 构在 此时 刻 出现正 、逆 转 动 。
、P c ,
1 动力学建 模
3 S P S + 1 P S 并联 髋 关节 试 验机 是 一种4自由度 空 间并 联机 构 ,试 验机 拓 扑 图如 图1 N示 。 选取动 平 台的6 4 " 姿 态坐标 g : Y z a p Y ) 作 为 系统 广义 坐标 。
3-PUU并联机构的动力学分析

3-PUU并联机构的动力学分析作者:范大俊来源:《科技资讯》 2015年第11期范大俊(大连大学机械工程学院辽宁大连 116622)摘要:多体系统进行动力学分析,是实现虚拟样机和虚拟现实的前提条件之一。
它在力学的基础上,经过半个世纪的发展,形成不同的研究方向和研究领域,并孕育而生了多款商业化软件。
该文运用凯恩方法,以动平台参考点的速度和角速度为伪速度,在任务空间中建立了封闭形式的运动方程。
在建模过程中,无需求解理想约束反力、不使用动力学函数,不需求导运算,变量和方程的数目少,方程表达式简单,计算效率得到显著提高。
关键词:并联机构凯恩方法动力学分析中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)04(b)-0214-01①作者简介:范大俊(1990.5—),男,汉族,本科生,主要研究方向为机械设计。
多体系统动力学是研究由若干个刚性或者柔性物体相互连接所组成的系统的运动规律的一门新兴学科,它包括多刚体系统动力学和多柔体系统动力学。
机械多体系统是对航空航天、数控机床、大型船舶等重型机械领域机电系统的高度浓缩。
对多体系统进行动力学分析,是实现虚拟样机和虚拟现实的前提条件之一[1]。
它在力学的基础上,经过半个世纪的发展,形成不同的研究方向和研究领域,并孕育而生了多款商业化软件。
它们的研究方法主要以矢量力学方法和分析力学方法为主。
经过多年的发展,又形成了以凯恩力学为基础的兼顾矢量力学和分析力学优点的建模方法。
并联机构动力学建模方法已趋于成熟,但大部分动力学模型是建立在关节空间中的。
在关节空间中进行仿真将增加计算量,提高了运算强度,可能导致计算精度的丧失甚至丢失。
此外,在关节空间中,我们常使用的PD控制会引出并联机构运动学正解的问题[2]。
并联机构的运动学正解方程复杂、极难求解。
更重要的是,并联机构的运动学正解具有多组解。
通过调整关节空间,未必可以使操作手臂得到我们需要的位姿。
3upu并联机构的运动学分析与结构参数优化
0 前言
机构的工作空间, 如极坐标搜索法、 局部坐标法、 蒙
3UPU 并联机构最早由 TSAI
[1]
提出, 3UPU 并联
特卡 洛 法 等。 沈 惠 平 等 [8] 采 用 极 坐 标 搜 索 法 分 析
机构因其具有较大工作空间 [2] 、 结构简单、 精度高、
3T1R 并联机构工作空间, 提高边界精度时使得计算
空间, 该方法所得工作空间的边界精度不高。
用一种新型的数值法分析机构的逆解和奇异性, 研究
求解机构的运动学逆解, 同时借鉴三维元胞自动机模
本文作者根据 3UPU 机构的结构特点, 通过方位
制方式。 蒲志新等 [6] 以 3UPU 并联作为研究对象, 采
特征集分析机构的 3UPU 并联机构特性, 利用数值法
numerical analysis method was used to analyze the workspace of the mechanism. The structural parameters of 3UPU parallel mechanism
were optimiห้องสมุดไป่ตู้ed based on Fruit Fly Optimization Algorithm ( FOA) . The results show that the 3UPU parallel mechanism has a large
Solidwork software. The position and orientation characteristics, degree of freedom and coupling degree of the mechanism were analyzed
一种两自由度并联机构的动力学分析
10
韩旭炤等:一种两自由度并联机构的动力学分析
第 10 期
Z
X2
A3
C2
兹
A2
茁2
2a O
l2
Zm B3
X
X1 C1
l1
B(1 B2) Om
Xm
茁1
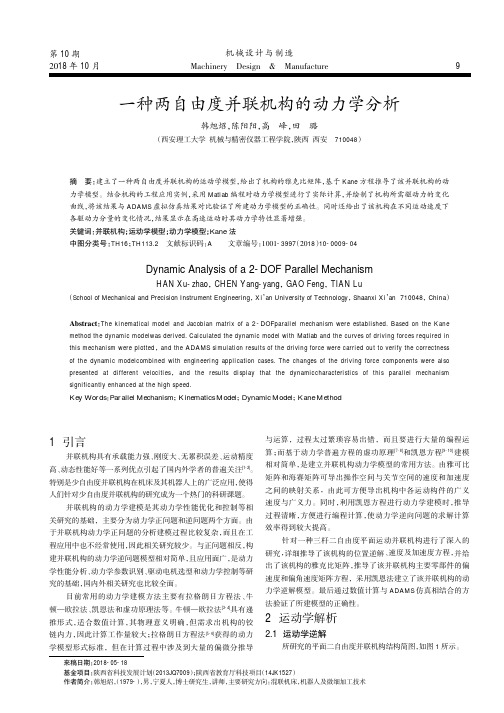
A1 图 1 并联机构结构简图
Fig.1 Schematic Diagram of the Parallel Mechanism
它由杆 A iBi (i=1,2,3)、A 2A 3、B2B3 和两个滑块 Ci,i=1,,2 组
Dynamic Analysis of a 2-DOF Parallel Mechanism
HAN Xu-zhao,CHEN Yang-yang,GAO Feng,TIAN Lu
(School of Mechanical and Precision Instrument Engineering,Xi’an University of Technology,Shaanxi Xi’an 710048,China)
2 运动学解析
2.1 运动学逆解
所研究的平面二自由度并联机构结构简图,如图 1 所示。
来稿日期:2018-05-18 基金项目:陕西省科技发展计划(2013JQ7009);陕西省教育厅科技项目(14JK1527) 作者简介:韩旭炤,(1979-),男,宁夏人,博士研究生,讲师,主要研究方向:混联机床,机器人及微细加工技术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
约 束 作 用 ,仅 能 做 三 维 转 动 ,因 此 在 踝 关 节 康 复 这 类仅 需 定位 的 场合 得到 应 用 n 。迄 今 ,国 内外 学 者 已对 该 类机 构 的工 作 空 间 、运 动 学 、奇 异 性 及
优化设 计 等方 面 开展 了广 泛 的研究 。
静 平 台之 间 通过 3 条UP S 型 运 动 支链 连 接 。 包含球 铰 的 中 间 约 束 分 支上 下 端 分 别 与 动 静 平 台 中心 固 定连 接 。 由于UP S 型运 动 支链 不限 制动平 台的 自由 度 ,因 此该 机 构 在 中 间约 束 分 支 的限 制 下 ,仅 作 绕球 铰D的三 维转 动 。
人 采 用 牛 顿一 欧拉 法 建 立 了S t e wa r t 平 台 的反 向动
力 学递 推 模 型 及 基 于 工 作 空 间和 基 于 关 节 空 间 封 闭形式 的动 力 学模 型 。张 国伟 等人 以Ka n e 方法 为 基 础 ,推 导 了 S t e wa r t 平 台的 动 力 学 方程 ,并 与 牛 顿欧 拉 法 进 行 了比 较 。李 新 友 等 人 亦 采 用 Ka n e 方 法 对 基 于 中央 立 柱 约 束 的3 UP S / S 并联 机 构 进 行 了动 力 学建 模 。张 建政 等 人基 于 牛顿一 欧 拉 方法 推导 出6 一 P S S 并联 机 构 动 力学 方程 的开式 和 闭式形 式 。并联 机 构 由于 其 闭环 特 点 决 定 了其 动 力学 模 型 是 一 个 多 自 由度 、 多变 量 、 强耦 合 的 复 杂非 线 性 系 统 ,其 建 模 型 方法 主 要 包括 拉 格 朗 日法 ,牛
印
松’ ,陈竟新 ,唐矫燕’
Yl N So n g’ , CHEN J i n g . x i n .T ANG J i a o . y a n
( 1 . 上海 电机学 院 机械学院 ,上海 2 0 0 2 4 5 ;2 . 上 海发那科 机器人有 限公 司,上海 2 0 1 2 0 6 )
摘 要:以3 一 u P s / s 并联机构的运动支链为研究对象,得到支链运动与动平台运动之间的映射关系。
以此为基础 ,采用牛顿一 欧拉法分 别对运动支链和动平台进行动力学建模 。通过消除构件 间的 内力,建立了3 - U P S / S 并联机构的动力学模型 ,得到驱动力与机构运动及外力之间的关系。 最后给出了仿真算例 , 得到了当动平台做一定规律运动时,驱动力及约束力的变化曲线。
顿一 欧拉法 ,凯恩法等 。其 中,采用拉格 朗 日法
图1 3 - U P S / S 型并联机构
骰稿 日期 : 2 0 1 2 - 1 0 - 1 9 基金项 目: 上 海 高校 选 拔 培养 优 秀青 年教 师科研 专 项 基金 项 目( 1 1 AZ 1 0 ) ;上海 市 电机 学 院科 研 启动 经 费项 目资 助
本 文 以3 一 UP S / S 型并 联机 构 为研 究 对 象 ,采 用 牛 顿一 欧 拉 法得 到 其 动 力 学模 型 ,得 到 机 构 驱 动 力与外 力 及运动 参数 间的映 射关 系 。
1 机构 运动学分析
图1 所 示 的3 . UP S / S 型 并联 机 构 中 ,动 平 台 和
得 到 的 动 力 学 模 型 虽 然具 有 显式 的结 构 ,但 运 算 量 较 大 ;凯 恩 法 运 算 量 小 ,但 求解 过 程 不 出现 约 束 反 力 ,且 过 程 晦涩 ; 牛 顿一 欧 拉 法 虽然 推 导 过 程 较 为 繁 琐 ,但概 念清 晰 ,没 有 多余 信 息 ,运 算
机 构 动 力 学 建 模 的 主 要 目的是 研 究机 构 运 动 参数 与 驱 动 力 之 间 的 射 关 系 , 它 是机 构 优 化 设
计 、动 态性 能评 价 及运 动 控制 的基 础 。黄 真 等人 采 用 拉 格 朗 日法 和 一 阶 、 二 阶 运动 影 响 系数 导 出
了6 自由度并 联 机构 的动 力 学模 型 。Da s g u p t a 等
关键词:并联机构;动力学建模;牛顿一欧拉法;3 - U P S / S 中图分类号 :T H 1 1 3 文献标识码 : A 文章编号 : 1 0 0 9 - 0 1 3 4 ( 2 0 1 3 ) O l ( - F ) - 0 0 8 6 - 0 3
D o i : 1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 0 1 ( 下) . 2 4
0 引言
与6 自由度 并联 机 构 相 比 ,少 自由度 并联 机 构
结 构 简 单 ,控 制 容 易 ,且 能 够 满 足 特 定 任 务 的 需 要 , 因此 成 为 目前 并 联 机 构 研 究 的 热 点 。具 有 中 间约 束分 支 的3 自 由度并 联机 构 , 由于 中间球 铰 的
( 1 1 C 4 0 2 ) ;上海市教育委 员会重点学科建设项 目资助( J 5 1 9 0 2 ) 作者简介:印松 ( 1 9 7 9 -),男 ,博士 ,讲师 ,主要从事机 电一体化方面的研究 。 [ 8 6 1 第3 5 卷 第1 期 2 0 1 3 — 0 1 ( 下)
l
l I 5 似
基于牛顿一 欧拉法 的3 一 UP S / S 并联机构动 力学分析
Dynam i c an al y si s of t he 3 - PU S, S par al l el m ech ani s m bas ed on n ew t on- eul er m et hod