(完整word版)基于proteus仿真的转速测量系统
(完整版)PROTEUS仿真调试使用手册
目录第1章Proteus ISIS简介 (1)第2章Proteus ISIS编辑环境 (2)第3章Proteus ISIS原理图输入 (3)3.1 Proteus ISIS原理图输入的可视工具介绍 (3)3.2 在Proteus ISIS原理图编辑窗口查找元件 (4)3.3 放置元件 (9)3.4 连线 (14)3.4.1 无模式连线 (14)3.4.2 自动连线模式 (14)3.4.3 动态光标显示 (14)3.5 元件标签 (17)3.5.1 编辑元件标签 (17)3.5.2 移动元件标签 (18)3.6 器件标注 (18)3.6.1 属性分配工具(PAT) (19)3.6.2 全局标注器 (20)第4章Proteus ISIS 8086仿真 (21)4.1 在Proteus ISIS中输入电路原理图 (21)4.2 在Proteus中设置外部代码编译器 (22)4.3 添加源代码,选择编译器。
(24)4.4 仿真调试 (26)4.4.1 调试模式 (26)4.4.2 设置断点 (27)第1章Proteus ISIS简介Proteus是英国Labcenter公司开发的电路分析与实物仿真及印制电路板设计软件,它可以仿真、分析各种模拟电路与集成电路。
软件提供了大量模拟与数字元器件及外部设备,各种虚拟仪器,特别是它具有对单片机及其外围电路组成的综合系统的交互仿真功能。
Proteus 7主要由ISIS和ARES两部分组成,ISIS的主要功能是原理图设计及与电路原理图的交互仿真,ARES 主要用于印制电路板的设计。
本手册介绍如何利用Proteus ISIS输入电路原理图、利用外部编译器编译8086汇编程序并进行基于8086微处理器的VSM 仿真。
Proteus 7可以在以下操作系统中使用:注意,Proteus软件也可能能在Windows 98,NT, Millennuium等合法Windows 系统中使用,只不过Labcenter和Microsoft都已经不再对此提供技术支持服务。
基于Proteus的直流电机闭环调速系统设计
摘要在工业自动控制系统和各种智能产品中常常会用用电动机进行驱动、传动和控制,而现代智能控制系统中,对电机的控制要求越来越精确和迅速,对环境的适应要求越来越高。
本设计以AT89C51单片机为核心,基于Proteus单片机仿真软件,完成了直流电机的转速自动测量及转速调节功能。
在设计中采用PWM技术和PID控制技术对电机进行控制,并且利用数码管设计的人机界面系统显示转速的设定值及实际值,通过应用PID算法对占空比的计算达到精确调速的目的。
还利用了Visual Basic6.0编程软件编写了一个简单的上位机软件,显示实际转速的变化情况,对PID参数的整定提供依据。
关键词:Proteus,AT89C51,PID,PWM调速,Visual Basic 6.0目录第一章绪论 (1)1.1 直流电机闭环调速系统背景 (1)1.2 本设计实现的基本功能 (1)1.3设计目的及意义 (1)第二章总体规划 (2)2.1 直流电机控制原理及特点 (2)2.2 直流电机调速控制方式选择 (2)2.3 PWM脉宽调制方式 (3)2.4 电机实际转速的获取 (3)2.5总体设计框图 (4)2.6 上位机界面设计 (4)第三章硬件设计 (5)3.1 AT89C52芯片介绍 (6)3.2 电机驱动电路设计 (7)3.3 按键模块设计 (7)3.4 数码管显示模块设计 (8)3.5 串口电路设计 (8)第四章软件设计 (9)4.1 主程序 (9)4.2 定时器0中断服务程序 (10)4.3 PID控制输出程序 (10)第五章硬件与软件联合调试5.1 运行时速度设定值与实际值 (12)5.2 运行时直流电机转动情况 (12)5.3 运行时上位机运行情况 (12)参考文献 (13)致谢 (14)附录 (15)第一章绪论1.1直流电机闭环调速系统背景对直流电机转速的控制即可采用开环控制,也可采用闭环控制。
与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范围可以大大提高。
转速测定及数据显示系统

转速测定及数据显示系统一、引言转速测定及数据显示系统是一种用于测量旋转设备转速并显示相关数据的系统。
在工业生产和实验研究中,准确测量旋转设备的转速对于确保设备正常运行和评估设备性能至关重要。
本文将详细介绍转速测定及数据显示系统的原理、组成部份以及其在不同领域的应用。
二、原理1. 光电传感器原理转速测定及数据显示系统通常使用光电传感器来测量旋转设备的转速。
光电传感器通过发射光束并接收反射回来的光束来检测旋转物体的运动。
当物体上的反射标记通过光电传感器时,光电传感器会产生一个电信号,该信号可以用来计算旋转物体的转速。
2. 计数器原理转速测定及数据显示系统中的计数器用于记录光电传感器产生的电信号的次数。
每次光电传感器检测到反射标记时,计数器就会增加一个计数值。
通过计数器记录的时间间隔和计数值,可以计算出旋转设备的转速。
三、组成部份转速测定及数据显示系统通常包括以下组成部份:1. 光电传感器光电传感器是系统中最关键的部份,用于检测旋转设备的转速。
光电传感器通常由发光二极管和光敏电阻组成,发光二极管发射光束,光敏电阻接收反射回来的光束。
光电传感器的选择应根据具体应用需求来确定。
计数器用于记录光电传感器产生的电信号的次数。
计数器可以是数字计数器或者微处理器。
数字计数器通常具有较高的计数精度和稳定性,而微处理器则可以实现更复杂的功能,如数据存储和数据显示。
3. 数据显示装置数据显示装置用于显示测量到的转速数据。
常见的数据显示装置包括数字显示屏、液晶显示屏和计算机界面。
数据显示装置可以直接显示转速数值,也可以显示其他相关信息,如时间、日期和单位等。
4. 电源电源用于为整个系统提供电力供应。
电源可以是交流电源或者直流电源,具体选择应根据系统的功耗和使用环境来确定。
四、应用领域转速测定及数据显示系统在各个领域都有广泛的应用,以下是一些常见的应用领域:1. 工业生产在工业生产中,转速测定及数据显示系统可以用于监测旋转设备的运行状态,如发动机、机电和风机等。
基于proteus的直流电机测速系统仿真
第2期(总第189期)2015年04月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.2Apr.文章编号:1672‐6413(2015)02‐0214‐02基于Proteus的直流电机测速系统仿真张小石,郝秀平(中北大学机电工程学院,山西 太原 030051)摘要:介绍了由AT89C51、LCD和L256组成的直流电机测速系统,详细介绍了系统的设计框图,并通过Proteus软件实现仿真。
仿真结果表明该系统具有可控调速、显示直观等特点。
关键词:直流电机;Proteus;仿真;测速系统中图分类号:TP391畅9∶TM33 文献标识码:B收稿日期:2014‐05‐26;修订日期:2014‐12‐26作者简介:张小石(1987‐),男,山西阳泉人,在读硕士研究生,主要从事链式自动机驱动技术。
0 引言直流电机的测速系统通过LCD可视化地显示电机的转速,便于操作人员观察,使其能够更加有效地对电机进行控制。
Proteus软件提供了大量的单片机仿真元器件,相当于虚拟实验室,节省了直流电机的研制成本,缩短了研制周期。
从科学的研究角度来看,基于Proteus的直流电机仿真是必要的、合理的。
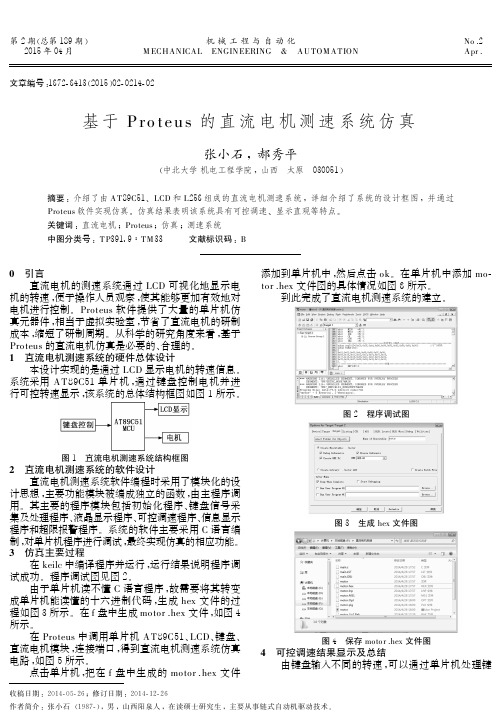
1 直流电机测速系统的硬件总体设计本设计实现的是通过LCD显示电机的转速信息。
系统采用AT89C51单片机,通过键盘控制电机并进行可控转速显示,该系统的总体结构框图如图1所示。
图1 直流电机测速系统结构框图2 直流电机测速系统的软件设计直流电机测速系统软件编程时采用了模块化的设计思想,主要功能模块被编成独立的函数,由主程序调用。
其主要的程序模块包括初始化程序、键盘信号采集及处理程序、液晶显示程序、可控调速程序、信息显示程序和超限报警程序。
系统的软件主要采用C语言编制,对单片机程序进行调试,最终实现仿真的相应功能。
3 仿真主要过程在keilc中编译程序并运行,运行结果说明程序调试成功。
程序调试图见图2。
电机转速测量系统设计(光电传感器)课程设计报告
《传感器原理与应用》课程设计1、题目:电机转速测量系统设计(光电转速传感器)院校:专业:姓名:学号:班级:指导老师:二0一六年六月目录第一章《传感器原理与应用》课程设计任务书 (4)1.1总要求 (4)1.2总任务 (4)1.3设计题目 (4)1.4设计内容 (4)1.5设计进度或计划 (4)1.6设计说明书包括的主要内容 (4)第二章系统介绍 (6)第三章系统设计方案 (6)3.1方案的设计与选择 (6)3.1.1 转速测量的方法 (6)3.1.2 整体控制方式 (8)3.1.3 传感器模块 (8)3.2 方案描述 (10)第四章系统理论分析与计算 (11)4.1 信号采集电路的分析 (11)4.2 电机转速的计算 (12)第五章硬件电路设计 (12)5.1 单片机模块 (12)5.1.1 STC89C52单片机简介 (13)5.1.2 时钟电路 (15)5.1.3 复位电路 (16)5.2 显示电路 (16)6.1 系统总体设计 (18)6.2 中断子程序设计 (19)6.3 定时子程序设计 (20)6.4 显示子程序设计 (21)第七章测试方案 (22)7.1 电路调试 (22)7.2 软件调试 (22)第八章心得体会 (25)参考文献 (25)附录 (28)附录一电路仿真图 (28)附录二程序清单 (28)附录三实物图 (37)第一章《传感器原理与应用》课程设计任务书1.1总要求课设题目尽量侧重于传感器检测模块设计,主要是绘制系统原理图、制作传感部分前端电路、实验调试及分析、撰写实验报告等。
电路图:传感检测/接口电路/控制电路、单片机检测系统电路(若题目要求,则应加上)。
程序:主程序、部分子程序(若题目要求,则应加上)。
说明书:按规范撰写。
1.2总任务针对总要求进行原理及方案论证、模块设计、接口电路设计、焊接或插接与调试、精度分析以及撰写报告等工作。
1.3设计题目电机转速测量系统设计1.4设计内容实现全部要求的实物功能,性能稳定,外形美观。
转速测量设计实验报告(3篇)

第1篇一、实验目的1. 了解转速测量的基本原理和方法。
2. 掌握转速测量仪器的使用方法。
3. 通过实验验证转速测量原理的正确性。
4. 熟悉转速测量系统的设计过程。
二、实验原理转速测量是指测量旋转物体的旋转速度,通常以每分钟转数(r/min)表示。
转速测量方法主要有以下几种:1. 机械式测量:通过齿轮、皮带等传动装置将旋转物体的转速转化为线性运动,进而测量转速。
2. 电磁式测量:利用电磁感应原理,将旋转物体的转速转化为电信号,再通过测量电信号频率来计算转速。
3. 光电式测量:利用光电传感器检测旋转物体的边缘或标记,通过测量光电信号的频率来计算转速。
本实验采用光电式测量方法,通过光电传感器检测旋转物体的边缘或标记,测量光电信号的频率,从而计算转速。
三、实验设备1. 光电传感器:用于检测旋转物体的边缘或标记。
2. 旋转物体:作为转速测量的对象。
3. 数据采集卡:用于采集光电传感器的信号。
4. 计算机:用于处理数据,计算转速。
5. 转速测量系统软件:用于显示转速数据、绘制转速曲线等。
四、实验步骤1. 连接实验设备:将光电传感器安装在旋转物体上,确保传感器能够准确检测到旋转物体的边缘或标记。
将数据采集卡与计算机连接,并将光电传感器的信号线连接到数据采集卡的输入端口。
2. 设置实验参数:打开转速测量系统软件,设置实验参数,如采样频率、转速范围等。
3. 进行实验:启动旋转物体,启动数据采集卡,记录光电传感器的信号。
4. 数据处理:将采集到的信号数据导入转速测量系统软件,计算转速。
5. 分析结果:根据实验数据,分析转速测量原理的正确性,评估转速测量系统的性能。
五、实验结果与分析1. 实验结果:通过实验,成功测量了旋转物体的转速,转速数据与实际转速基本一致。
2. 结果分析:(1)实验结果表明,光电式转速测量方法能够准确测量旋转物体的转速。
(2)转速测量系统的性能取决于光电传感器的精度、数据采集卡的采样频率以及数据处理算法。
电机转速测量系统设计
电机转速测量系统设计引言:在工业生产中,电机的转速是一个非常重要的参数,对于电机的控制和监测具有极大的意义。
因此,设计一个准确测量电机转速的系统是至关重要的。
本文将详细介绍一个电机转速测量系统的设计,包括硬件设计和软件设计。
1.系统硬件设计:(1)传感器选择:电机转速的测量可以采用多种不同的传感器,如光电编码器、霍尔效应传感器等。
根据转速范围和实际需求,选择合适的传感器。
例如,对于高速电机,光电编码器是一个较好的选择,而对于低速电机,霍尔效应传感器更为合适。
(2)电路设计:根据所选传感器的特性,设计合适的电路来接收和处理传感器输出的信号。
电路应包括信号放大器、滤波器和适当的保护电路,以确保对传感器输出信号的准确测量和可靠性。
(3)ADC选择:传感器输出的信号是模拟信号,需要将其转换为数字信号以进行处理和分析。
选择合适的ADC(模数转换器)来实现信号转换。
ADC的选择应考虑到转换精度、速度和功耗等因素。
2.系统软件设计:(1)信号处理:通过ADC获取的数字信号可以通过软件进行进一步处理。
根据具体需求,可以采用滤波、放大、平均等方法来提高测量精度和减小噪声干扰。
(2)算法设计:根据测量需求和应用场景,设计合适的算法来计算电机的转速。
常用的算法包括脉冲计数法、相位差法和频率计算法等。
选择合适的算法需要考虑测量精度、实时性和系统复杂度等因素。
(3)界面设计:为了方便用户对电机转速进行监测和控制,可以设计一个用户界面来显示测量结果和提供控制功能。
界面可以采用图形界面或者命令行界面,具体设计需要根据用户需求和系统复杂度进行选择。
3.系统测试和优化:完成硬件和软件设计后,需要对系统进行测试和优化。
测试过程中应验证系统的测量精度、稳定性和响应时间等指标。
如果存在问题,需要对系统进行优化和调整,直到满足设计要求为止。
总结:电机转速测量系统是一个重要的控制和监测系统,其准确性和可靠性直接影响到电机的运行和维护。
本文给出了一个电机转速测量系统的设计流程,包括硬件设计和软件设计。
(完整word版)实验四转速、电流反馈控制直流调速系统的仿真(word文档良心出品)
实验四转速、电流反馈控制直流调速系统的仿真一、实验目的熟练使用 MATLAB 下的 SIMULINK软件进行系统仿真。
学会用 MATLAB 下的 SIMULINK 软件建立转速、电流反馈控制的直流调速系统的仿真模型和进行仿真实验的方法。
二、实验器材PC 机一台, MATLAB 软件三、实验参数采用转速、电流反馈控制的直流调速系统,按照要求分别进行仿真实验,输出直流电动机的电枢电流I d和转速n 的响应数据,绘制出它们的响应曲线,并对实验数据进行分析,给出相应的结论。
转速、电流反馈控制的直流调速系统中各环节的参数如下:直流电动机:额定电压 U N = 220 V,额定电流 I dN =136 A,额定转速 n N = 1460r/min,电动机电势系数C e= 0.132 V· min/r ,允许过载倍数λ=1.5 。
晶闸管整流装置的放大系数K s = 40。
电枢回路总电阻 R =0.5Ω,电枢回路电磁时间常数T l = 0.03s,电力拖动系统机电时间常数 T m = 0.18 s,整流装置滞后时间常数Ts=0.0017s,电流滤波时间常数T oi=0.002s。
电流反馈系数β=0.05V/A (≈10V/1.5I N)。
四、实验内容1、电流环的仿真。
参考教材P90 中相关内容建立采用比例积分控制的带限幅的电流环仿真模型,设置好各环节的参数。
140 2 0.5-K-0.002s+1 0.0017s+1 0.03s+1 0.18sStep Transfer Fcn Gain Saturation Transfer Fcn1 Transfer Fcn2 Transfer Fcn31-K-sGain1 Integrator0.050.002s+1Transfer Fcn4 Scope图 1 电流环的仿真模型2、按照表 1 中的数据分别改变电流环中比例积分控制器的比例系数K p和积分系数K i,观察电流环输出电枢电流I d的响应曲线,记录电枢电流I d的超调量、响应时间、稳态值等参数,是否存在静差?分析原因。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Proteus仿真的转速测量系统设计
摘要:利用增量式编码器的信号特征、proteus软件的基本功能,设计以AT89C52单片机为控制中心的编码器转速测量电路,详细分析软件实现的方法,并给出c语言程序,利用Proteus软件进行仿真得到预期的测量结果。
本文便是运用AT89C52单片机控制的智能化转速测量仪。
电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。
本系统基于proteus仿真对电机转速进行测量,并可以和PC机进行通信,显示电机的转速,并观察电机运行的基本状况。
本设计主要用AT89C52作为控制核心,由增量式编码器、LED数码显像管、HIN232CPE 电平转换、及RS232构成。
详细介绍了单片机的测量转速系统及PC机与单片机之间的串行通讯。
充分发挥了单片机的性能。
本文重点是测量速度并显示在5位LED数码管上。
其优点硬件是电路简单,软件功能完善,测量速度快增、精度高、控制系统可靠,性价比较高等特点。
关键字:单片机;转速;编码器
一、设计任务
在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。
模拟式采用测速发电机为检测元件,得到的信号是模拟量。
数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。
随着微型计算机的广泛应用,特别是高性能价格比的单片机的出现,转速测量普遍采用以单片机为核心的数字式测量方法。
本课程需要设计一个以单片机为控制中心的编码器转速测量系统,编码器信号利用信号源直接输入。
七段数码发光管作为转速显示输出。
本组通过设计整个系统方案,单片机选型为AT89C52,源代码进行设计以及注释,绘制出系统硬件电路图以及控制软件的主程序与子程序的流程图,并且成功的基于proteus进行了系统仿真。
二、总体设计
三、硬件设计
利用Proteus ISIS 新建项目,通过左侧栏区得P命令,在Pick devices 窗口中选择系统元器件。
根据需要找出所需元器件,排列,然后进行布线。
如图
所示,采用AT89c52单片机作为控制器,使用(7SEG-MPX4-CA-RED)4位七段数码发光管作为转速输出,可以输出0-9999之间的数值。
单片机P1口8个引脚接在LED显示器的段选码(a、b、c、d、e、f、g、dp)引脚上,单片机的P2口的4个引脚接在LED显示器位选码(1、2、3、4)引脚上,电阻起限流作用,采用总线方式接线使电路更为简洁。
为简化设计编码器信号利用信号源直接输入P3.4和P0.4口以代替。
在工具栏内选中信号源工具,在对象选择窗口选择“PLUSE”对象,分别连接在P3.2、P0.4作为编码器A、B路信号、参数设为类型为plus、频率为1kHz、电压幅值为5V模拟正向转动时将B路信号延时250微秒(1kHz时1周期对应1ms,滞后90度即延时250微秒)
为区分编码器是正转、反转以确定对计数脉冲进行递增或递减操作。
利用介入P3.2口信号的下降沿触发外部中断INTO,在中断服务程序中,判断此时P0.4口的电压,如果是高电平,则为正向运转,正向运行标志位P0.5置1,并对脉冲计数加1,相反如果此时P0.4口为低电平,则为反向运转,将运行方向标志清零,对脉冲数减1。
四、软件设计
1、软件设计思路分析
2、程序流程图
主程序流程图
3、源代码
#include<reg52.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit SIGA=P0^3;//A路信号
sbit SIGB=P0^4;//B路信号
sbit DIREC=P0^5;//方向指示灯
uchar flag,m;
uint pcount,temp,temp1,m1;
uchar code table[18]={0xc0,0xf9,0xb0,0x99,0x92,0x82,0xf8,0x80, 0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xff,0xf9,0x0c,};
uchar a[4]=0;
uchar *bp;
void init(void)
{
DIREC=1;
pcount=0;
TMOD=0x01;//定时器0方式1
TH0=0x3c;
TL0=0xb0;
EA=1;
ET0=1;//开中断
IT0=1;EX0=1;TR0=1;
}
void tim0(void) interrupt 1 using 1//定时器中断程序{
TH0=0x3d;
TL0=0xb0;
temp1=pcount-temp;//计算T0的时间内脉冲数
temp=pcount;
flag=1;//设标志
}
void int0(void) interrupt 0 using 0//外部中断程序 {
if(SIGB==1)//B信号为高电平
{DIREC=1;//正向运行
pcount++;
}
else {
DIREC=0;//反向运行
pcount--;
}
}
void delayms(uchar ms)//延时程序
{
uchar i;
while(ms--)
{for(i=0;i<20;i++);}
}
void display1(char idata *ap)//显示子程序 {
uchar sel,i;
P2=0;//关显示
sel=0x08;//选最左边led
for(i=0;i<4;i++)
{
P1=table[*ap];//送断码
P2=sel;//送位选码
delayms(500);
ap++;
P2=0;
sel=sel>>1;//右移一位
}
}
void chang(int num)//转换子程序
{
uchar t;
int num1;
t=0;
if(num<0)//取绝对值
{num=-num;}
num1=20*num;//转换成每秒脉冲数
for(t=0;t<4;t++)
{
a[t]=num1%10;//取余数送数组a
num1=num1/10;//除10
}
}
void main()
{
Init();
do{
if(flag==1)
{
m1=temp1;
chang(m1);
flag=0;}
bp=&a[0];
display1(bp);
}
while(1);
}
五、仿真
在Keil vsion3环境下,新建Keil 项目,选用AT89C52单片机作为工作CPU,新建kcsj.c文件并加载至项目中,在“Option for tonget”中打开“Output”窗口,选择“Creat hex file”选项,工作主频率设定为12MHz。
设计程序并进行编译,编译成功后将产生kcsh.hex文件。
在proteus中选中AT89C52进行设置,设置单片机工作频率为12MHz,按照正确的路径加载kcsj.hex文件。
单击Proteus ISIS编辑环境下的运行仿真按钮,针对调试仿真得到的结果。
若需修改硬件在Proteus中进行,软件在Keil vision3中修改,重新生成hex文件。
输入信号频率设为1kHz,仿真可以得到结果,数码管显示1000即采集脉冲数,与编码器设定频率完全一致。
六、设计总结。