工业机器人分类介绍
简述工业机器人的定义

简述工业机器人的定义工业机器人是指用于代替或辅助人工进行工业生产的自动化机器。
工业机器人是现代制造业中的重要工具,通过自动化和智能化的技术,提高生产效率和产品质量,降低劳动成本,满足不断变化的市场需求。
1. 工业机器人的定义与分类工业机器人是一种能够完成多种生产工作的多关节机械装置。
它们可以执行各种任务,如装配、焊接、搬运、喷涂等。
根据其结构和特点,工业机器人可以分为协作机器人、固定机器人和移动机器人。
2. 工业机器人的应用领域工业机器人广泛应用于制造业的各个领域。
在汽车制造业中,工业机器人可以完成车身焊接、喷涂、装配等任务。
在电子产业中,工业机器人可以完成智能手机的组装和测试。
在食品加工行业,工业机器人可以完成包装和品质检测等工作。
3. 工业机器人的优势与挑战工业机器人相比于传统的手工生产具有许多优势。
首先,工业机器人可以持续高效地工作,不受疲劳和时间限制。
其次,工业机器人的精确性和稳定性较高,可以提高生产质量。
此外,工业机器人还可以减少人为因素对产品质量的影响,降低质量风险。
然而,工业机器人的引入也面临一些挑战,如高成本投入、安全性和人机协作等问题。
4. 工业机器人的发展趋势随着科技的不断进步,工业机器人正在迎来新的发展机遇。
首先,工业机器人将更加智能化,具备学习和自适应能力,可以适应不同的工作环境和任务。
其次,工业机器人将更加灵活多变,可以通过人机协作实现更高效的生产方式。
此外,工业机器人的生产成本也将进一步下降,使更多企业能够引入并应用这一技术。
5. 工业机器人的影响与展望工业机器人的引入不仅推动了制造业的转型升级,也对劳动力市场产生了影响。
一方面,工业机器人的广泛应用导致某些劳动力岗位的减少,从而引发就业压力。
另一方面,工业机器人的存在也创造了新的就业机会,如机器人维护和开发人员。
因此,在工业机器人的发展过程中需要平衡经济效益和社会效益,促进机器人与人类的共存共荣。
总之,工业机器人作为现代制造业的重要组成部分,对提高生产效率和产品质量起到了重要的作用。
机器人的分类和应用领域

机器人的分类和应用领域在现代科技的快速发展下,机器人正逐渐成为我们生活中不可或缺的一部分。
机器人在各个领域都扮演着重要的角色,并在不断拓展其应用范围。
本文将从机器人的分类和广泛应用领域两个方面来探讨机器人的现状和前景。
一、机器人的分类机器人可以根据其功能、外型和控制方式进行分类。
根据功能,机器人可以分为工业机器人、服务机器人和专用机器人三类。
1. 工业机器人工业机器人广泛应用于制造业。
它们被用来自动化生产线中的各种重复性、繁琐的操作,如焊接、装配、喷涂等。
工业机器人的主要特点是具备高效率、高精度和高稳定性。
2. 服务机器人服务机器人用于辅助人类完成各种日常任务,如清扫、保洁、送餐和导航等。
随着人口老龄化趋势的不断加剧,服务机器人在医疗、养老、酒店等领域中有着广泛的应用前景。
3. 专用机器人专用机器人是为特定领域或任务而开发的机器人。
例如,军事机器人用于侦查、救援和爆破等任务;农业机器人用于自动化农场管理;教育机器人用于辅助教学和儿童教育等。
此外,机器人还可以根据其外型进行分类。
人形机器人、四足机器人、轮式机器人等各种形态的机器人被创造出来以适应不同的任务需求。
二、机器人的应用领域机器人的应用范围非常广泛,几乎涵盖了各个领域。
1. 制造业工业机器人在制造业中发挥着重要的作用。
它们能够完成高强度、高精度、高重复性的工作任务,提高生产效率和产品质量,降低人力成本,并减少工伤事故的发生。
2. 农业农业机器人在农田管理、种植和收获等方面具有巨大潜力。
它们能够自动进行土地耕作、浇水、喷洒农药等工作,提高农业生产效率,减少农药使用量,保证食品安全。
3. 医疗机器人在医疗领域中有着广泛的应用。
手术机器人能够辅助医生进行高精度的手术操作,提高手术成功率并减少创伤。
智能医疗机器人能够提供陪护、监测和治疗等服务,减轻医护人员的负担。
4. 教育教育机器人已经成为教育改革的重要组成部分。
它们能够提供个性化的辅导和学习资源,并通过互动性强的方式激发学生的兴趣和学习积极性。
工业机器人的分类

工业机器人的分类工业机器人是在工业生产过程中使用的一种自动化设备,它能够代替人工完成重复性、繁琐或危险的工作任务。
随着技术的不断进步,工业机器人已经成为现代工厂生产的重要组成部分。
在不同的工作场景中,工业机器人可以根据其功能和结构的不同进行分类。
本文将介绍几种常见的工业机器人分类。
一、按照工作方式分类1.1 固定式机器人固定式机器人是指在工作过程中固定在指定位置的机器人。
它们通常安装在机器人工作台上或者固定在生产线上进行作业。
由于其稳定的工作平台,固定式机器人多用于需要高精度操作和稳定性要求较高的工作任务,如装配、焊接或零件加工。
1.2 移动式机器人移动式机器人是指具备自由移动能力的机器人,它们可以在工作场景中自由行走、导航并完成任务。
移动式机器人广泛应用于大型仓库、物流中心和智能工厂等场景,可实现自动化搬运、拣选和运输等工作。
1.3 协作式机器人协作式机器人是指能够与人类工作人员进行安全合作的机器人。
这类机器人通常与人共享工作空间,并具备对人的动作、姿态和力度等感知能力,以避免与人发生意外碰撞。
协作式机器人广泛应用于组装、包装等与人密切合作的工作任务。
二、按照结构分类2.1 直臂机器人直臂机器人是一种结构简单、柔性度高的机器人。
它们通常采用类似人的手臂结构设计,具备多自由度运动能力,可实现非常灵活的各种操作,如抓取、组装和装卸等任务。
2.2 SCARA机器人SCARA机器人是指选择性合拢运动(Selective Compliance Assembly Robot Arm)机器人。
它们具备两个旋转轴和一个垂直移动轴,适用于需要快速、精确的垂直下压和组装任务。
2.3 Delta机器人Delta机器人是一种并联机器人,它们由一个固定平台和数个连杆构成。
这种机器人结构紧凑、重量轻,适用于高速、精度要求较高的装配和包装任务。
2.4 拆解式机器人拆解式机器人是指由多个可拆卸模块组成的机器人。
这样的设计可以实现机器人结构的快速更换和灵活配置,以适应不同的工作需求。
机器人的分类与应用场景
机器人的分类与应用场景随着科技的飞速发展,机器人在工业、医疗、教育、服务等多个领域都有了广泛的应用,越来越多的人开始关注机器人。
那么,机器人到底是什么,有哪些分类以及在哪些场景下得到应用呢?下面将从这些方面一一进行介绍。
一、机器人是什么?机器人是一种能够代替人类完成某些工作的机械装置,其基础技术包括机械、电子、控制、传感、信息处理等多个领域。
机器人具有自主决策、感知环境与执行任务的能力,并且能够适应各种不同的工作环境。
二、机器人的分类机器人按照应用场景的不同,可以分为许多不同的分类。
下面将介绍常见的几种机器人分类。
(一)按照外部形态而分类1.人形机器人:这类机器人的外形和人类非常相似,可以用来执行某些人类肢体难以完成的复杂工作,例如探险、救援等。
代表作品例如日本的ASIMO和美国的ATLAS机器人。
2.轮式机器人:这类机器人通常使用轮子或履带作为移动方式,能够在不平坦的地形上自由行动。
应用领域广泛,例如自动化物流、清洁等。
代表作品例如雅培的Lynx机器人和iRobot的Roomba机器人。
3.飞行机器人:这类机器人使用飞行方式进行移动,如无人驾驶飞机和四旋翼飞行器等。
主要应用于空中摄影、检测、救援等领域。
代表作品包括微软的Hover Machine和中国的大疆创新的Phantom系列。
(二)按照使用方式而分类1.工业机器人:这类机器人主要用于生产线上进行工艺生产,例如汽车、电子产品等制造。
它们可以完成重复性、高精度的工艺操作,如焊接、喷涂和点胶等。
国内较著名的厂商有ABB、KUKA。
2.服务机器人:这类机器人用于提供服务,例如接待、售货员等。
他们能够根据消费者的需求智能地进行服务,如日本的Pepper机器人和美国的Tally机器人等。
3.医疗机器人:这类机器人在医疗领域得到广泛应用,如手术机器人、康复机器人、检测机器人等。
代表作品例如美国的Da Vinci手术机器人和加拿大的Medrobotics双向操作式内窥镜。
工业机器人的分类—按机械结构分类
2.并联机器人
并联机器人可以定义为动平 台和定平台通过至少两个独立的运 动链相连接,机构具有两个或两个 以上自由度,且以并联方式驱动的 一种闭环机器人。
2.并联机器人
按照并联机构的自由度分类: 两自由度并联机构
三自由度并联机构
四自由度并联机构
五自由度并联机构
六自由度并联机构
按照并联机构的自由度分类——两自由度并联机构
按照并联机构的自由度分类——四自由度并联机构
四自由度并联机构大多不是完全并联 机构,如2-UPS-1-RRRR机构,运动 平台通过3个支链与定平台相连,有2 个运动链是相同的,各具有1个虎克铰 U、1个移动副P,其中P和其中一个的 R是驱动副,因此这种机构不是完全 并联机构。
按照并联机构的自由度分类——五自由度并联机构
以下是按照设备的结构形式和用途对 机器人进行分类。
机械结构 (坐标形式)
用途
根据结构形式分类
串联机器人 并联机器人
1.串联机器人
根据结构形式分类
串联机器人是开式运动链,它是由一系列 连杆通过转动关节或移动关节串联而成。 关节由驱动器驱动,关节的相对运动导致 连杆的运动,使手爪到达一定的位姿。
1.串联机器人
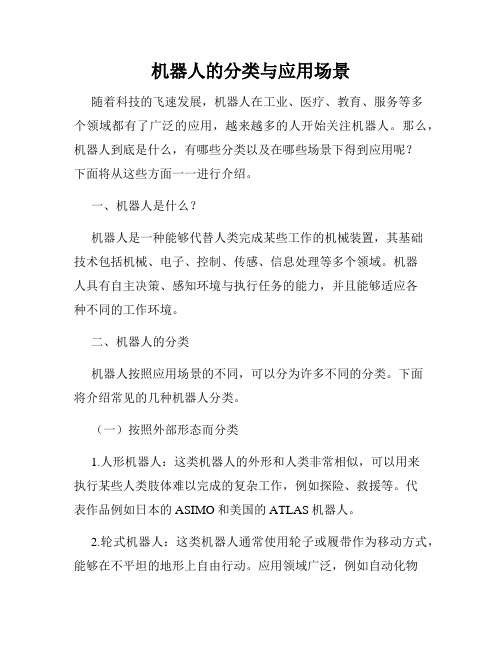
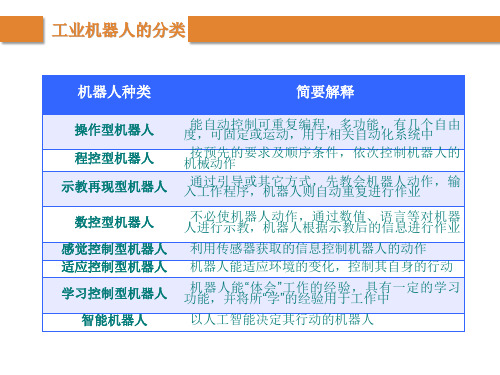
工业机器人的分类
机器人种类
简要解释
操作型机器人 程控型机器人 示教再现型机器人
能自动控制可重复编程,多功能,有几个自由 度,可固定或运动,用于相关自动化系统中 按预先的要求及顺序条件,依次控制机器人的 机械动作 通过引导或其它方式,先教会机器人动作,输 入工作程序,机器人则自动重复进行作业
数控型机器人 感觉控制型机器人 适应控制型机器人 学习控制型机器人
1.串联机器人——⑷多关节机器人
多关节型机器人由多个旋转和摆动机构组合而成。 纯球状
机器人的分类和特点

机器人的分类和特点机器人是指能够进行工作、任务或动作的自动化设备或系统,通常由多个机械零件、传感器、控制器和电源组成。
机器人在现代社会中起着重要的作用,广泛应用于工业生产、医疗保健、农业、物流和家庭服务等领域。
根据功能和特点的不同,机器人可以被分为多个不同的分类。
一、工业机器人工业机器人是最常见、最广泛应用的机器人类型。
它们被设计用于在工业生产过程中执行各种任务,如焊接、组装、包装、搬运等。
工业机器人通常具有高精度、高速度和重复性的特点,能够提高生产效率和产品质量。
它们可以根据不同的需求和环境进行编程,并且能够通过传感器和视觉系统进行感知和判断。
二、服务机器人服务机器人是为人类提供各种服务的机器人。
它们可以用于家庭服务、医疗护理、餐饮服务、旅游导览等领域。
服务机器人通常具有人性化的外观和交互界面,能够与人类进行语音或人机交互,执行各种任务,如打扫卫生、照顾老人、送餐等。
此外,服务机器人还具有自主导航和避障能力,可以自主规划和执行任务。
三、军事机器人军事机器人是用于军事目的的机器人系统。
它们可以用于侦察、炸弹拆除、救援、作战等任务。
军事机器人通常具有高度的机动性、耐力和灵活性,能够在极端环境下执行任务。
军事机器人可以通过遥控或自主模式进行操作,并且可以携带各种武器和传感器。
此外,军事机器人还具有自主导航和自主决策的能力,能够在战场上独立执行任务。
四、医疗机器人医疗机器人是用于医疗保健领域的机器人系统。
它们可以用于手术、康复、诊断等任务。
医疗机器人通常具有精准的运动控制和操作能力,能够减少手术风险和提高手术精度。
医疗机器人可以通过遥控或自主模式进行操作,并且可以根据医生的指示和患者的需求进行操作。
此外,医疗机器人还具有自主导航和避障能力,在医疗环境中独立执行任务。
五、教育机器人教育机器人是用于教育和培训目的的机器人系统。
它们可以用于学校教育、培训机构和家庭教育等场景。
教育机器人通常具有可编程的教育内容和交互界面,能够与学生进行互动和学习。
工业机器人的分类与特点

工业机器人的分类与特点一、工业机器人简介工业机器人是一种能够执行各种工业任务的自动化设备。
它们根据预设的程序和算法,可以完成生产线上的各类操作,例如组装、焊接、搬运等。
工业机器人的应用领域广泛,如汽车制造、电子工业、食品加工等。
二、工业机器人的分类根据其结构和应用领域的不同,工业机器人可以分为以下几类:1. 固定式机器人固定式机器人是指安装在工作台、生产线或固定位置上的机器人。
它们的工作区域通常是有限的,并且只能在特定的空间范围内执行任务。
由于固定式机器人的结构比较简单,其成本较低,因此在一些简单重复的工业任务中得到广泛应用。
2. 移动式机器人移动式机器人是一种能够自主移动的机器人,其具备独立的导航能力。
移动式机器人可以在工厂内部进行自由移动,并且能够适应不同的工作环境。
这种机器人常用于物料搬运、仓库管理等场景,可以大大提高生产效率。
3. SCARA机器人SCARA(Selective Compliance Assembly Robot Arm)机器人是一种广泛应用于组装领域的机器人。
它们具有高精度、高负载能力和高速度的特点,能够在组装线上完成精密的装配操作。
4. Delta机器人Delta机器人是一种特殊结构的机器人,其机械臂呈三角形结构。
Delta机器人具有较大的工作范围和高速度,常用于装配、包装等操作。
5. 前端机器人前端机器人是一种具备感知和控制能力的机器人。
它们通过传感器来感知周围环境,并根据感知结果做出相应的动作。
前端机器人常用于无人工厂和智能仓库等场景,可以实现高度自动化的生产流程和物流系统。
三、工业机器人的特点工业机器人具有以下几个显著特点:1. 自动化工业机器人能够根据预定的程序自动执行任务,无需人工干预。
它们能够完成一些繁琐、危险或重复性高的工作,从而提高生产效率和品质稳定性。
2. 灵活性工业机器人具有较强的灵活性,能够适应不同的操作场景和需求变化。
通过修改程序或更换工具,工业机器人可以快速适应生产线上的不同任务,实现生产过程的快速调整。
2.1工业机器人的分类-根据拓扑结构分类-课件

2024/2/29
13
微 3.软混雅联黑式,2机0,器标人题
• 微软雅黑,大小(18为推荐,若内容多,可改为16);此区域图文混排,
➢动混画联元机件器最人后固在定结位构置上勿常超有出3此种区形域式。:;编排形式可自选,勿超防并护出联罩机此构 区域
➢ (1) 并联机构通过其他机构串联 而成。此类混联机器人在基于
2024/2/29
8
微 2.软并雅联黑机,2器0,人标题
•➢微定软义雅:黑末,端大执小行(器1通8为过推至荐少,两若个内独容立多运,动可链改和为基1座6相)连;,此且区组域成图一文闭混式排机, 动构画链元,件或最者后说固多定个位连置续勿的超链出状此结区构域共。同;支编持排同形一式个可终自端选控.软混雅联黑式,2机0,器标人题
•➢微混软联雅机黑构,即大有小并(1联8机为推构荐刚,度若好内的容优多点,,可又改为有1串6)联;机此构区工域作图空文间混大排,的 动优画点元,件能最充后分固发定位挥置串勿、超并出联此机区构域各。自;编的排优形点式, 进可自一选步,扩勿大超机出器此人区的域 应用范围, 提高机器人的性能。
动画元件最后固定位置勿超出此区域。;编排形式可自选,勿超出此区域
2024/2/29
12
微 3.软混雅联黑式,2机0,器标人题
•➢微定软义雅:黑一,种大小将(串1联8为和推并荐联,有若机内结容合多,起可来改的为机1构6), 即;此为区混域联图式文机混构排,
动画元件最后固定位置勿超出此区域。;编排形式可自选,勿超出此区域
微软雅黑,20,标题
• 微软雅黑,大小(18为推荐,若内容多,可改为16);此区域图文混排, 动画元件最后固定位置勿超出此区域。;编排形式可自选,勿超出此区域
2024/2/29
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2 Industrial robots - definition and classification1.2.1 Definition (ISO 8373:2012) and delimitationThe annual surveys carried out by IFR focus on the collection of yearly statistics on the production, imports, exports and domestic installations/shipments of industrial robots (at least three or more axes) as described in the ISO definition given below. Figures 1.1 shows examples of robot types which are covered by this definition and hence included in the surveys.A robot which has its own control system and is not controlled by the machine should be included in the statistics, although it may be dedicated for a special machine. Other dedicated industrial robots should not be included in the statistics. If countries declare that they included dedicated industrial robots, or are suspected of doing so, this will be clearly indicated in the statistical tables. It will imply that data for those countries is not directly comparable with those of countries that strictly adhere to the definition of multipurpose industrial robots.∙Wafer handlers have their own control system and should be included in the statistics of industrial robots. Wafers handlers can be articulated, cartesian, cylindrical or SCARA robots. Irrespective from the type of robots they are reported in the application “cleanroom for semiconductors”.∙Flat panel handlers also should be included. Mainly they are articulated robots.Irrespective from the type of robots they are reported in the application “cleanroom for FPD”.Examples of dedicated industrial robots that should not be included in the international survey are:∙Equipment dedicated for loading/unloading of machine tools (see figure 1.3).∙Dedicated assembly equipment, e.g. for assembly on printed circuit boards (see figure 1.3).∙Integrated Circuit Handlers (pick and place)∙Automated storage and retrieval systems∙Automated guided vehicles (AGVs) (see “World Robotics Service Robots”)The submission of statistics on industrial robots is mandatory for IFR member associations. In some countries, however, data is also collected on all types of manipulating industrial robots, that is, both multipurpose and dedicated manipulating industrial robots. Optionally, national robot associations may therefore also submit statistics on all types of manipulating industrial robots, which will be included in the publication World Robotics under the respective country chapter.Industrial robot as defined by ISO 8373:2012: An automatically controlled, reprogrammable, multipurposemanipulator programmable in three or more axes, which can beeither fixed in place or mobile for use in industrial automationapplicationsThe terms used in the definition above are explained in more detail below: ∙Reprogrammable: designed so that the programmed motions or auxiliary functions can be changed without physical alteration;∙Multipurpose: capable of being adapted to a different application with physical alteration;∙Physical alteration: alteration of the mechanical system (the mechanical system does not include storage media, ROMs, etc.)∙Axis: direction used to specify the robot motion in a linear or rotary mode1.2.2 Classification by types of robotsIn agreement with the robot suppliers, robots should be classified only by mechanical structure as of 2004.Classification by mechanical structure• Linear robots (including cartesian and gantry robots)• SCARA robots• Articulated robots• Parallel robots (delta)• Cylindrical robots• Others• Not classifiedFigures 1.1 illustrates the mechanical configuration of these types of robots. Below, some further explanations and definitions are given for the various classifications by types of robots.The number of axes should be understood as the basic feature supplied by the producer and not axes added later by the user.Robots broken down by mechanical structure are based on the following definitions: Cartesian robot: robot whose arm has three prismatic joints and whose axes are coincident with a cartesian coordinate systemSCARA robot: a robot, which has two parallel rotary joints to provide compliance in a planeArticulated robot: a robot whose arm has at least three rotary jointsParallel robot: a robot whose arms have concurrent prismatic or rotary joints Cylindrical robot: a robot whose axes form a cylindrical coordinate systemFigure 1.1: Classification of industrial robots by mechanical structureExamples of articulated robots1,200 kg payload capacity - Handling of largest parts and structuresFlexible mounting possibilities – optimizedworking rangeWelding robotThe Swingarm is an articulated robot combined with SCARA elements Different dualarm robots:Examples of applications of articulated robotsHandling for metal casting PalletizingWelding PaintingPackaging Handling for forgingFDP HandlingWafer handlerExamples of SCARA RobotsExamples of applications of SCARA RobotsAssemblyPackagingExamples of linear/cartesian/gantry robotsLinear RobotGantry RobotExamples of applications of linear/cartesian/gantry robotsHandling for plastic mouldingSealingPressing LaserWeldingExamples of parallel robotsExamples of applications of parallel robotsPicking and placing AssemblyHandlingExamples of dedicated industrial robots not to be included in the statisticsDedicated machine-tool loaderPrinted circuit board assemblerAutomated storage andretrieval system。