超酷MWC四轴飞行器DIY全套教程之刷电调贴
四轴飞行diy全套入门教程

了保险,一定要将购 的电调设置一 , 则容易难于控 如 电调的启动模式 一样, 那 有些都转很快了,有些 很慢, 就有问题了 注 通过遥控器进行设置电调,一定要接 电机,因 说明书 说的“滴滴”类的声音,是通 过电机发出来的 开始就是因 没有接电机, 疑惑怎 没声音,以 坏了
无 电机 螺旋桨篇 电机 有 电机和无 电机, 要 错了,无 是四轴的 流 它力气大,耐
基本原理 词解释 1 遥控器篇
什 是通道? 通道就是可以遥控器控 的动作路数, 如遥控器 能控 四轴 飞,那 就是 1 个通道
但四轴在控 过程中需要控 的动作路数有
右 前 旋转
所以最 得 4 通道遥控器 如果想以 玩航拍 些就需要更多通道的遥控器了
什 是日本手 美 手? 遥控器 油门的 置在右边是日本手 在 边是美 手,所谓遥控器油门,在四轴飞行器当 中控 供电电流大小,电流大,电动机转得快,飞得高 力 大 反之 理 判断遥控器的
1 组是单节 电引出线 衡充电了
s 数有关 ,充电时按说明书,都插入充电器内,就可以进行
机架篇
机架的轴长短有没有规定? 理论 讲, 要 4 个螺旋桨 打架就可以了,但要考虑到,螺旋桨之间因 互相影响,建议 是 要太 , 则影响效率 也是 什 四轴 2 螺旋桨多的原因之一 3 的 有个缺 , 衡 好做
,高 c,3s 以 电池 最 建议 1500mah,20c,3s 小四轴,因 自身升力有限,整体 率也 高,就可以考虑小容 ,小 c,3s 以 电池 没 玩过, 做建议
衡充电什 意思 如 3s 电池,内部是 3 个 电池,因
艺原因,没 法保证 个电池完全一 ,充电
放电特性都有差异,电池串联的情况 ,就容易照常某些放电过度或充电过度,充电 饱满 等,所以解决 法是 别 内部单节电池充电 动力 电都有 2 组线,1 组是输出线 2 根 ,
自制四轴飞行器之路

自制四轴飞行器之路
四轴飞行器,又称四旋翼飞行器,简称四轴、四旋翼。
四轴飞行器的四个螺旋桨与电机直接相连,通过改变电机转速获得旋转机身的力,从而调整自身姿态。
四轴的叶片转速极高,有一定的危险性,一般不能在室内飞,特别是在调试过程中更加不稳定,轻则炸鸡撞坏物品,重则伤到人。
我做四轴的主要目的是为了学习飞控算法,这个过程肯定少不了调试,为了安全,我选择做一个小一点的,手掌那么大的四轴,叶片的威力比较小,价格也便宜,即使摔坏也不心疼。
这种小四轴一般采用PCB做机架,用720空心杯电机代替无刷电机,用MOS管代替电调,电池采用3.7v锂聚合物电池(尺寸跟手机电池差不多,但是放电电流要大很多),遥控用2.4G无线模块,或者用蓝牙连接手机,成本100左右,续航时间大概6-7分钟,遥控距离在10米以内。
选择零件
四轴上最重要的就是飞控,所以第一步:选择飞控。
市面上有许多现成飞控,也可以自己用电子元件做一个分控。
有很多有名的开源飞控,例如KK,QQ,匿名,MultiWii/MWC,APM/PIX等。
KK、QQ飞控功能较少,只有基本的四轴飞行功能,甚至不支持GPS。
匿名飞控是国内新出现的飞控,功能比以上两个要多,价格也要贵很多。
MultiWii/MWC飞控是基于arduino的,支持GPS,能路线规划,在线调试。
APM也是基于arduino的,功能更为齐全,硬件也更为复杂,飞控中有两块单片机,分别执行不同功能。
APM已将arduino的性能开发到极限,于是有了升级版PIX,从arduino 转到了STM32,处理速度提升了10倍,同样用了两块不同型号的STM32协同运作,是目前已知的最好的开源飞控。
四轴飞行器DIY入门篇二

四轴飞行器DIY入门篇二:部件组装及试飞前一篇介绍了四轴飞行器的主要部件,大家对四轴也有了一个大概的认识,本篇就请大家一起来动手组装、调试四轴。
正式开工前先列一个配件清单,每个配件都有价位不等的商品可供选购,根据大家的预算可以自由组合,最低大约900块可以组装一架能飞起来的四轴~在“其他配件”栏,楼主没有列出具体价格,因为这些配件有些朋友可能已经有了,比如电烙铁,绑带,还有就是一些零件可以在买主要配件时找卖家附送,比如桨保护器,香蕉头等。
下面正式开工:第一步,连接电机和电调:电机和电调各有三根线,现在连接时无需考虑对应关系,后续调试时根据电机选择方向再做调整:注意:香蕉头和T插的焊接一定要牢固,不能有虚焊,否则后续飞行会有很大的炸机隐患!!!焊接教程可参看此视频,如果手艺不到家可请卖家代劳。
接好的四个电机电调,楼主没有用桨夹,用的是桨保护器,方便试飞,正式飞行时还是建议用桨夹比较安全:商品机架都有说明书,大家照说明书组装即可,楼主之前用的铝合金600机架好旧了,为了这篇经验,楼主做了个“日”字机架,成本大约30块钱,如果这个机架好飞,后续再考虑用碳纤管。
简单描述下制作过程:材料:两根1米长的16mm玻纤管,16mmPVC三通6个,轻木一根,绑带若干,502胶水;1.将玻纤管切为四根330mm长的短管,轻木也切为330mm长,用PVC三通连接玻纤管和轻木,连接处点上502;红色PVC三通为头位标示,蓝色PVC三通为尾部标示;2.在连接轻木的三通上钻一个孔,不要钻透,在小孔里面插一小段碳杆,滴上502固定,防止轻木移位;对了,做这一步之前最好找个水平仪矫正轻木到水平位置;3.在四个角的三通上钻孔,用来固定电机,位置如图:第三步,安装电机到机架今天没有找到合适长度的螺丝,所以暂时用扎带大法:扎带固定电调,电调T插连接电源分配线,不用分顺序;第四步,安装飞控楼主用一个5号电池盒做了一个平台,选取轻木中间的位置,用螺丝固定:电池盒盖的四角钻孔,安装4个尼龙柱:安装好飞控,调整到水平位置,然后再用尼龙柱固定,按照飞控说明书连接好接收机,电池检测线,电机、超声波等信号线:将接收机用魔术贴固定在四轴尾部的三通上:将超声波固定在四轴头部的三通上,用废旧塑料卡剪个形状托住超声波,注意:超声波发生器要和地面水平,否则影响精度;在飞控安装位的正下方垫上废旧泡面板,然后贴上魔术贴,上电池后注意重心要在飞控中心点,如果有偏差请调整电池位置:第六步,上电调试1.接收机和遥控器对码,具体方法请参考遥控器说明书,对飞控进行解锁:2.上桨调试动力系统,这里先不要固定桨,只要把桨搭在电机上即可,给油,观察桨的转动方向是否正确,如果不正确,任意调换两根电调和电机连接线的顺序即可;另外要注意安装桨的方向,桨页上有字的一面朝上:对了,由于楼主用的是便宜桨,所以在使用前最好对桨做个平衡矫正,最简易的方法就是在桨轴中穿一根碳管,碳管两头搭在架子上,观察桨是否能水平,根据实际情况在桨叶上粘透明胶,直到桨叶水平。
四轴飞行器制作
用户名UIDEmail请登录后使用快捷导航没有帐号?注册窗体顶端找回密码密码注册窗体底端快捷导航首页迟些门户开放时,指向门户首页全部贴汇总技术贴汇总所有技术性的帖子汇总,方便阅读非技术汇总所有非技术性的帖子汇总,方便阅读帮助Help无图快速版阿莫电子邮购本论坛由阿莫电子邮购独家赞助窗体顶端搜索热搜: 雕刻机阿莫淘金春风电源窗体底端本版用户amoBBS 阿莫电子论坛»论坛首页› 机械电子› 四轴飞行› 多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理.../ 4 页下一页返回列表查看: 15733|回复: 126多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理图][复制链接]电梯直达1楼发表于2011-1-20 12:12:02|只看该作者|倒序浏览一、相关技术文件:1. 程式控制基底ATmega 8ATmega8 技术文件点击此处下载ourdev_611065Q176XE.PDF(文件大小:2.45M) (原文件名: ATmega8_cn.PDF)2. 无线模组CC2500 (2.4G Hz 无线IC) 技术文件点击此处下载ourdev_611064KBBYJG.pdf(文件大小:1.26M) (原文件名: cc2500_cn.pdf)RDA T212 (PA+LNA) 技术文件点击此处下载ourdev_611063XH619C.pdf(文件大小:229K) (原文件名: RDA_T212.pdf)RDA ES02 (SP2T Switch )技术文件点击此处下载ourdev_611062ACP4OA.pdf(文件大小:29K) (原文件名: RDA_ES02.pdf)3. 无刷马达电子调速模组FDS7764A (N-Channel) 技术文件点击此处下载ourdev_612408FW8MGC.pdf(文件大小:273K) (原文件名:FDS7764A.pdf)TPC810 (P-Channel) 技术文件点击此处下载ourdev_612409Y3Y2UA.pdf(文件大小:293K) (原文件名:TPC8103.pdf)4. 液晶萤幕显示模组16x02 (液晶萤幕) 技术文件点击此处下载ourdev_612410MVKKXZ.zip(文件大小:365K) (原文件名:LCD_1602.zip)5. MAG 9 FOD 飞行姿态感测模组(3轴磁力计+3轴线性加速计+3轴陀螺仪)LSM303DLH (磁力计+线性加速计) 技术文件点击此处下载ourdev_612411H66HEH.zip(文件大小:2.02M) (原文件名:LSM303DLH.zip)IMU-3000 (陀螺仪) 技术文件点击此处下载ourdev_612412ORGL5T.zip(文件大小:1.93M) (原文件名:IMU_3000.zip)6. GPS模组U-BLOX NEO-5Q (GPS) 技术文件点击此处下载ourdev_612413K5MRZI.zip(文件大小:3.03M) (原文件名:NEO_5.zip)7. 超音波测距模组HIN-232 (RS-232 5V至10V升压IC) 技术文件点击此处下载ourdev_612414E8JL5V.pdf(文件大小:564K) (原文件名:HIN232.pdf)LM-324 (OP) 技术文件点击此处下载ourdev_612415WGYN7Y.pdf(文件大小:599K) (原文件名:LM324.pdf)二、TWI(I2C) 通讯规划(用于各个电路模组通讯)M8 TWI(I2C) 规划(PDF档) 电路图档(Eagle档) 点击此处下载ourdev_611067JVY9ZR.zip(文件大小:34K) (原文件名:TWI_BLOCK.zip)三、电路模组列表0.Eagle 用的零件档点击此处下载ourdev_612416HE44VJ.zip(文件大小:531K) (原文件名:lbr.zip)1.发射机控制模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611068Z9N5AQ.zip(文件大小:48K) (原文件名:Transmitter_Control.zip)发射机控制模组照片(是TWI Master)< br> (原文件名:TRANSMITTER_13.JPG) 引用图片2.接收机控制模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611197NAW7UP.zip(文件大小:40K) (原文件名:Reciver_Control.zip)接收机控制模组照片(也是飞控模组, 是TWI Master 其他模组均为Slave)< br> (原文件名:RECIVER_03.JPG) 引用图片3. 数字式 2.4GHz 无线电模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611069RC47A2.zip(文件大小:54K) (原文件名:Transmitter_Radio.zip)数位式 2.4GHz 无线电模组照片<br> (原文件名:RECIVER_02.JPG) 引用图片4.液晶萤幕显示模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611070KCJ8LL.zip(文件大小:38K) (原文件名:Transmitter_Display.zip)液晶萤幕显示模组照片<br> (原文件名:RECIVER_05.JPG) 引用图片5. USB TO TWI(I2C) 模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611392MGUB5H.zip(文件大小:49K) (原文件名:USB2TWI.zip)USB TO TWI(I2C) 模组照片<br> (原文件名:USB2TWI_02.JPG) 引用图片6. 超音波测距模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612431EWSNQI.zip(文件大小:58K) (原文件名:Sonar.zip)超音波测距模组照片(原文件名:SONAR_01.JPG)7. GPS模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612432DH4YN8.zip(文件大小:52K) (原文件名:GPS.zip)GPS模组照片( 用RS-232 COM3 连进PC , 简易十字铜天线长10CM,同轴线焊在交叉点)(原文件名:GPS_01.JPG)GPS模组照片(由M8 解析NMEA 取经纬度...等参数, 飞控板由TWI(I2C) 取得参数)(原文件名:GPS_02.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_03.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_04.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_05.JPG)8. MAG 9 FOD 飞行姿态感测模组[3轴磁力计+3轴线性加速计+3轴陀螺仪] (PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612433RVOFBN.zip(文件大小:56K) (原文件名:MAG_9FOD.zip)MAG 9 FOD 模组照片(磁力计+线性加速计LSM303DLH 数字16bit)(原文件名:MAG9FOD_01.JPG)MAG 9 FOD 模组照片(陀螺仪IMU-3000 数字16bit)(原文件名:MAG9FOD_02.JPG)9. 无刷马达电调模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612434VG3ZSB.zip(文件大小:56K) (原文件名:BLMC.zip)无刷马达电调模组照片(由商用电调改装而成)(原文件名:BLMC_01.JPG)无刷马达电调模组照片(原商用电调)(原文件名:BLMC_00.JPG)无刷马达电调模组照片(P-Channel TPC8103 + N-Channel FDS 7644A)(原文件名:BLMC_02.JPG)无刷马达电调模组照片(用漆包线重焊接脚电路)(原文件名:BLMC_03.JPG)10. 无刷马达无刷马达照片(10x45螺旋桨+ DIY 无刷马达组)(原文件名:BLDC_MOTOR_01.JPG)补充内容(2012-3-28 14:03):29楼有补齐失去连结的照片补充内容(2012-3-28 14:05):28楼有更新资料补充内容 (2012-3-28 14:33):117楼:补齐1楼失去连结的档案补充内容 (2012-3-28 14:41): 42楼: 更正电调原理图资料。
MultiWii MWC 飞控 电调设置教程
MultiWii MWC 飞控电调设置教程
一、预备工作
多轴飞行器的电调设置
MultiWii MWC 飞控支持XXD【好盈程序】好盈电调中特威电调等一些常见的电调首先用大家最常用的XXD电调给大家说说电调的基本设置
XXD电调必须选择兼容好盈程序的。
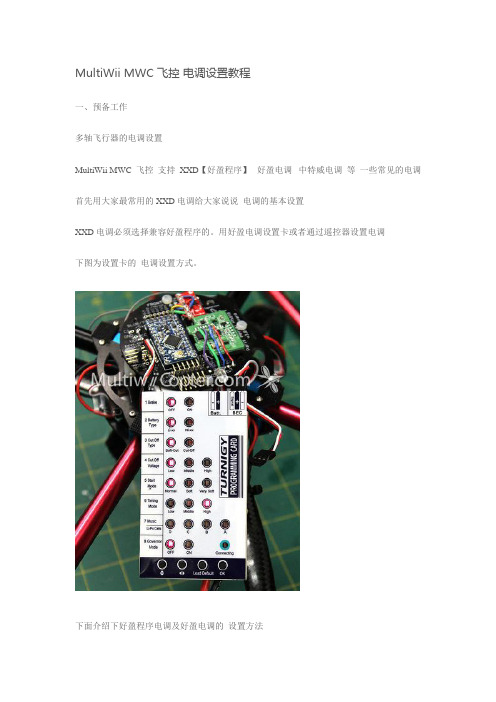
用好盈电调设置卡或者通过遥控器设置电调
下图为设置卡的电调设置方式。
下面介绍下好盈程序电调及好盈电调的设置方法
MultiWii MWC 飞控需要将电调设置成以下参数
1、刹车【关】
2、电池类型【锂电】
3、低压保护方式【逐渐降低功率】
4、低压保护阀值【低】
5、启动模式【普通启动】
6、进角【高】
7、定速【关】注:配置卡可以设置
8、恢复出厂设置
9、退出
电调油门行程设置
以XXD好盈程序电调为例
连线方式如下图:
如果手头有舵机Y线就方便多了,可以把多个电调连接一起然后汇总到一根线连接到接收机上!
设置方法如下图:。
150元飞控DIY-MWC
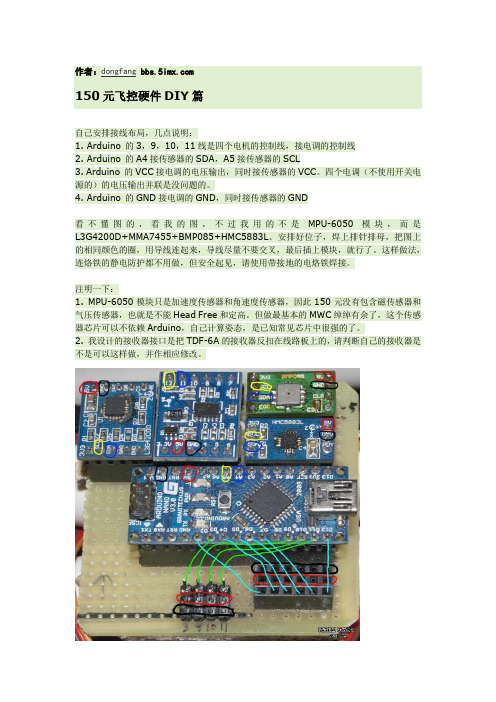
作者:dongfang 150元飞控硬件DIY篇自己安排接线布局,几点说明:1. Arduino 的3,9,10,11线是四个电机的控制线,接电调的控制线2. Arduino 的A4接传感器的SDA,A5接传感器的SCL3. Arduino 的VCC接电调的电压输出,同时接传感器的VCC。
四个电调(不使用开关电源的)的电压输出并联是没问题的。
4. Arduino 的GND接电调的GND,同时接传感器的GND看不懂图的,看我的图,不过我用的不是MPU-6050模块,而是L3G4200D+MMA7455+BMP085+HMC5883L。
安排好位子,焊上排针排母,把图上的相同颜色的圈,用导线连起来,导线尽量不要交叉,最后插上模块,就行了。
这样做法,连烙铁的静电防护都不用做,但安全起见,请使用带接地的电烙铁焊接。
注明一下:1. MPU-6050模块只是加速度传感器和角速度传感器,因此150元没有包含磁传感器和气压传感器,也就是不能Head Free和定高。
但做最基本的MWC绰绰有余了,这个传感器芯片可以不依赖Arduino,自己计算姿态,是已知常见芯片中很强的了。
2. 我设计的接收器接口是把TDF-6A的接收器反扣在线路板上的,请判断自己的接收器是不是可以这样做,并作相应修改。
飞控软件安装篇飞控软件安装篇:Arduino,是一个很方便的单片机模块。
1.下载arduino的软件,在/hu/Main/Software2.解压缩上面的包,运行arduino.exe,查看配置一下自己的sketch目录3.用USB线把Arduino nano连上PC之后,应该会“发现新硬件”4.在arduino中找一个Blink的sample,选择正确的端口和arduino板,编译上传,你可以发现Arduino nano就按照程序的指示,一闪一闪5.下载最新版本的MWC固件,在/p/multiwii/downloads/list6.解压到arduino的sketch目录7.重新打开arduino,打开MWC的sketch8.以上几步有问题的,请查找arduino的入门介绍资料。
MWC 多方案DIY 经验教程

QQ: 1106719582类板子:1. 14路数字输入输出口:工作电压为3.3V或者5V,每一路能输出和接入最大电流为40mA。
每一路配置了20-50K欧姆内部上拉电阻(默认不连接)。
除此之外,有些引脚有特定的功能▪串口信号RX(0号)、TX(1号): 提供TTL电压水平的串口接收信号,可以与6脚Header通孔相连。
▪外部中断(2号和3号):触发中断引脚,可设成上升沿、下降沿或同时触发。
▪脉冲宽度调制PWM(3、5、6、9、10 、11):提供6路8位PWM输出。
▪SPI(10(SS),11(MOSI),12(MISO),13(SCK)):SPI通信接口。
▪LED(13号):Arduino专门用于测试LED的保留接口,输出为高时点亮LED,反之输出为低时LED熄灭。
2. 6路模拟输入A0到A5:每一路具有10位的分辨率(即输入有1024个不同值),默认输入信号范围为0到5V,可以通过AREF调整输入上限。
除此之外,有些引脚有特定功能▪TWI接口(SDA A4和SCL A5):支持通信接口(兼容I2C总线)。
3. Reset:信号为低时复位单片机芯片。
如果采用以下10DOF,/item.htm?spm=a1z09.12.10.56.anjkQc&id=175********&_u=u1581nt87ee GY-86 10DOF MS5611 HMC5883L MPU6050模块MWC飞控传感器模块请打开#define GY_86 // Chinese 10 DOF with MPU6050 HMC5883L MS5611, LLC (1)如果使用PPM遥控器, 则连接PPM的8个通道:首先看定义def.h//RX PIN assignment inside the port //for PORTD#define THROTTLEPIN 2#define ROLLPIN 4#define PITCHPIN 5#define YAWPIN 6#define AUX1PIN 7#define AUX2PIN 0 // optional PIN 8 or PIN 12#define AUX3PIN 1 // unused#define AUX4PIN 3 // unused如果打算在pro mini上使用AUX2,那么打开#define RCAUXPIN8或者//#define RCAUXPIN12连接好PPM接受芯片的PIN到上述PIN.那么数据的获取在RX.ino// predefined PC pin block (thanks to lianj) - Version without failsafe#define RX_PIN_CHECK(pin_pos, rc_value_pos) \if (mask & PCInt_RX_Pins[pin_pos]) { \if (!(pin & PCInt_RX_Pins[pin_pos])) { \dTime = cTime-edgeTime[pin_pos]; \if (900<dTime && dTime<2200) { \rcValue[rc_value_pos] = dTime; \} \} else edgeTime[pin_pos] = cTime; \}ISR(RX_PC_INTERRUPT) {….RX_PIN_CHECK();}rcValue的数值就是各个PIN的数值。
多旋翼飞行器 F4飞控+4合1电调说明书
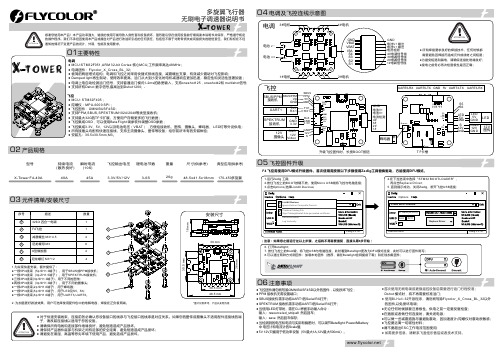
*图片仅供参考,产品以实物为准1.为实现快速安装,额外提供了:●一根5Pin线束(5p SH1.0端子),用于SBUS或PPM接收机;●一根3Pin线束(3p ZH1.5端子),用于SPEKTRUM接收机;●三根3Pin线束(3p SH1.0端子),用于不同的图传;●两根3Pin线束(3p SH1.0端子),用于不同的摄像头;●一根2Pin线束(2p SH1.0端子),用于蜂鸣器;●一根5Pin线束(5p SH1.0端子),用于LED及S5,S6;●一根6Pin线束(6p SH1.0端子),用于UART3,UART6。
2. 为加强更好滤波效果,用户可选择使用配件包中的电解电容,焊接在正负极两端。
持续电流(散热良好)瞬时电流(10S)飞控输出电压尺寸(供参考)重量锂电池节数型号典型应用(供参考)X-Tower F4-40A 40A45A3-6S170-450多旋翼3.3V/5V/12VF4 飞控需使用DFU模式升级固件。
首次使用需按照以下步骤使用Zadig工具替换驱动,方能使用DFU模式。
(注意:如果您之前运行过以上步骤,之后将不再需要重复,直接从第6步开始)● 飞控固件请勿刷写除OMNIBUSF4SD以外的固件,以免损坏飞控;● PPM 接收机无需设置端口;SBUS接收机需手动将UART1的Serial RX打开;●SPEKTRUM 接收机需手动将UART3的Serial RX打开;●当使用LED灯带时,需在CLI界面手动输入命令:●输入:resource led_strip a8 然后回车;输入:save 然后回车保存;当检测到的电压和电流与实际有偏差时,可以调节Betaflight-Power&Battery●中 电压计和电流计的Scale值;●只能用于低功率设备(最大,最大)。
5V12V5V1A12V500mA●首次使用无刷电调或更换遥控设备后需要进行油门行程校准;Dshot 模式时,将不再需要校准油门;● 使用BLHeli-开源程序,32请勿刷写除Flycolor_X_Cross_BL_32以外的固件,以免损坏电调;●无论任何时候都要注意极性,供电之前一定要反复检查;●在插拔或者做任何连接时,请关闭电源;●可以做一些减震措施尽量避免震动,因加速度计/陀螺仪对震动很敏感;●飞控要远离一切磁性材料;●请不要超出工作电流范围使用ESC;● 如需更多信息,请联系飞盈佳乐售后或者技术支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
锋仔_up | 我的 | 设置 | 消息 | 提醒 | 退出 积分: 35 | 用户组: 新手上路
导读 首页 全部帖汇总 技术帖汇总 非技术汇总 阿莫电子邮购 阿莫醉心红酒
快捷导航
请输入搜索内容
帖子
热搜: 净化器 雕刻机 阿莫邮购 模具
#在这里快速回复#
post _ne w re ply
收藏 40
回复 论坛公益广告:使用360产品将会被封锁ID。周流氓枪毙1万次也无法弥补3721犯下的罪行。
发表于 2013-8-13 23:分享~
举报 2楼
587 589
0
积分 莫元 飞币
高级会员
发消息 liangzhu
在Flash to:选择Skywalker 20A,然后再选择Skywalker 20A_MULTI。会出现如下界面:
/forum.php?mod=viewthread&tid=5546515&highlight=
3/14
2014年4月17日
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
这里讲解一下配置界面,如下图所示:低压限制不必开启,闭环模式慎用,我试过闭环LoRange,感觉对油门行程改变挺大,大家慎用或者不 用。电机转向设置可尝试,但电源正负极变换不推荐尝试。再生制动极力推荐开启,如图设置即可,其他参数保持不变就行。
我建议大家什么都不要配置或者只开启再生制动这两种方案,因为我都试过,效果都很好。当然开启再生制动响应更快一些。你要是开启了其他 选项,那我就不敢担保了。 接着,我只开启再生制动:
发表于 2013-8-30 09:12:12 | 只看该作者
顶一下 不知道 嫩不能用pro mini 代替nano
/forum.php?mod=viewthread&tid=5546515&highlight=
举报 4楼
4/14
2014年4月17日
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
电调和Nano的硬件连接指南
这里先感谢一下5imx里的mirikle大神,是他的帖子造福了广大模友,这里还要用到他帖子里的一张图片,再次感谢他。
简单说来,Nano和电调之间连接需要三根线,GND(黑色)、C2CK(红色)、C2D(白色)。 Nano的ICSP的6号针脚连接电调黑色焊盘(如果你感觉连接黑色焊盘不方便,可以直接用杜邦线把ICSP的6号针脚和电调信号线的黑色线(地 线)连接起来) Nano的ICSP的4号针脚连接电调红色焊盘 Nano的ICSP的1号针脚连接电调白色焊盘 这样用简单的杜邦线和排针自制的接头,就可以不用焊接就完成刷固件,怎么做接头方便大家各自发挥了。我的接头是这样的
oB 304 积分
1 莫元
0 飞币
中级会员
发消息
BS
阿
本帖最后由 hitor 于 2013-8-13 23:04 编辑
前言: 电调的选择对于多轴飞行器来说肯定是响应越快越好,多轴要的就是快速响应。但快速响应等高性能就意味着高价格。在价格和性能之间权
衡,不好弄? 但BLHELI电调开源固件解决了这个问题。具体做法:我们只需要花40-50块钱买一个好盈 天行者20A/40A电调,然后往电调里刷BLHELI的电调 固件,然后你就得到了一个响应速度可以和200-300块钱的高价电调相当的廉价电调。具体如何刷BLHELI我会在之后的教程里专讲。话说回来这 BLHELI固件也不是非刷不可,不刷就是响应慢了点,照样能飞起来。好盈天行者20A和好盈天行者40A,选哪个都行,看你资金情况和长远考 虑。其实好盈天行者20A的就够用了。 给好盈天行者20a电调刷BLHeli固件详细教程 好盈电调原固件可以用,但响应不快。刷了BLHeli固件之后响应速度大大提高,这会让你四轴飞行更加稳定。我建议大家还是刷一下。 这是主贴:ht t p://w w w .he lifre /blog.php?b=2001 这是讨论帖:ht t p://w w w .he lifre /show t hre ad.php?t =467519 到这里可以下载BLHe li-Se t up:ht t ps:///s/z32i4re hild8vsbcnr5x 这里是一些技术文档:
要往电调里刷固件,你得先做一个类似中转的下载器,文档里有相应的引脚连接方法,我们选择Arduino Nano来作为中转下载器。 BLHeli-Setup Serial-Protocol.pdf (83.17 KB, 下载次数: 102)
这是BLHeli的串口协议,大家感兴趣可自行研究。 Regenerative braking and closed loop.pdf (462.56 KB, 下载次数: 81)
自己一个人弄是不是会导致接触不良的???
246 234
将以上三张图中颜色对应连接起来,就完成了Nano和电调的硬件连接。 接下来将Nano引出的地线与待刷电调的信号线的地线连接起来,然后连上电池给电调供电。
接下来将C2CK接到电调的红色焊盘,C2D接到电调的白色焊盘。运行BLHeli-Setup.exe,选择Setup-->Read Setup From Hex File,应该会出现 下图界面:
90
80
0
积分 莫元 飞币
注册会员
发消息 superplaim
回复 公益广告:发表招聘帖子需要缴费,有需要可以联系网站工作人员王小姐:13711915767.
发表于 2013-8-30 09:12:37 | 只看该作者
顶一下 不知道 嫩不能用pro mini 代替nano
举报 5楼
90
80
0
积分 莫元 飞币
6/14
2014年4月17日
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
发消息 qinshiysb
回复 发表于 2013-9-3 13:01:11 | 只看该作者
hitor 发表于 2013-9-2 10:50 我的一般是一次成功,若不成功,多刷几次肯定成功。要么是那三根线没连接上,要么是你没给电调供电。这个 ...
BLHeli supported SiLabs ESCs.pdf (4.17 MB, 下载次数: 196)
你可以到这里文档里找到支持BLHeli的SiLabs电调,当然好盈天行者20a和好盈天行者40a肯定在其中。 BlHeli-Setup serial Interfaces Pinout.pdf (52.54 KB, 下载次数: 140)
回复 公益广告:发表新主题时,务必起一个能说明帖子内容的清晰标题,否则将会被封锁ID(点击查看详细说明)
发表于 2013-8-18 21:02:51 | 只看该作者
dx,这个固件刷了可以支持多高的刷新频率?
举报 3楼
7
7
0
积分 莫元 飞币
新手上路
发消息 superplaim
回复 公益广告:本论坛不得使用、宣传Q群。 有讨论请在论坛里进行。 违者将封锁ID.
莫
电
/forum.php?mod=viewthread&tid=5546515&highlight=
1/14
2014年4月17日
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
如图中所示,选择红框中的Nano,点击Make Arduino Nano Pro Stick,接下来
然后点击Flash BLHeli,进入如下界面:
再次选择Skywalker 20A_MULTI,确定之后出现如下界面,一路确定即可。
john800422
这样一块好盈20A电调的BLHeli固件就刷好了,同样方法继续刷其他电调即可。 你可以接上电机试一试响应效果,与原装电调对比一下,是不是发现自检音乐变调了,响应速度提高不少。祝大家成功。
qinshiysb 发表于 2013-9-1 15:57 楼主 这个是怎么回事?
304
1
0
积分 莫元 飞币
中级会员
重新刷一次,有时候一次不能成功
发消息 qinshiysb
回复 发表于 2013-9-1 18:07:04 | 只看该作者
hitor 发表于 2013-9-1 16:38 重新刷一次,有时候一次不能成功
楼主 我已经重刷了N次 还是这样 你是一次成功的吗?
246 234
0
积分 莫元 飞币
中级会员
发消息 hit o r
回复
楼主 | 发表于 2013-9-2 10:50:08 | 只看该作者
本帖最后由 hitor 于 2013-9-2 10:51 编辑 qinshiysb 发表于 2013-9-1 18:07 楼主 我已经重刷了N次 还是这样 你是一次成功的吗?
发表于 2013-8-30 17:41:52 | 只看该作者
很好啊 这号等这个呢
38
37
0
积分 莫元 飞币
新手上路
/forum.php?mod=viewthread&tid=5546515&highlight=
举报 7楼
5/14
2014年4月17日
发消息
超酷MWC四轴飞行器DIY全套教程之刷电调贴 (amoBBS 阿莫电子论坛)
举报 9楼
举报 10楼
举报 11楼
304
1
0
积分 莫元 飞币
中级会员
我的一般是一次成功,若不成功,多刷几次肯定成功。要么是那三根线没连接上,要么是你没给电调供电。这个不熟悉的话,最好两个人一起 刷,一个操作软件,一个连接电调。
/forum.php?mod=viewthread&tid=5546515&highlight=