电流滞环跟踪控制分析
有源电力滤波器滞环电流跟踪控制策略仿真研究

船 电技 术 { 控制技术
有 源 电力滤 波 器滞 环 电流跟 踪 湖北 工业 大 学 电气 与 电子 工程学 院,武汉 4 3 0 0 6 8 ) 摘 要 :本文介 绍 了三 相并 联型 有源 电力 滤波 器 的构成 ,分 析 了基于 三相瞬 时功 率理 论 的 f . i 谐波 检 测算 法 ,并且 采用 P I调节 实现 直流 侧 电容 电压 的有效控 制 。为 了克服 电流跟 踪控 制策 略 中传统 滞 环控 制 的环 宽设置 对 开关 频率 和响应 速度 的影响 ,本 文采用 一种 基于 电压 空间矢 量 的滞 环 控制 , 有效 的 降低 谐波 电流 含量及 开 关频 率 的 同时保证 了直 流侧 电压 的响应 速度 , MA T L AB仿真实 验 结果 证 明 了该控制 策 略 的可行 性及 良好 的补 偿性 能 。 关键 词 :有 源 电力滤 波器 中图分 类号 :T M7 4 3 . 滞环 电压 空间 矢量 文 献标识 码 :A 仿真
s p a c e v e c t o r , e f f e c t i v e l y r e d u c i n g t h e h a r mo n i c c u r r e n t c o n t e n t a n d e n s u r i n g t h e r e s p o n s e s p e e d f o
Xu Ch a o
( S c h o o l o f E l e c t r i c a l a n d E n g i n e e r i n g ,H u b e i Un i v e r s i t y o f T e c h n o l o g y ,W u h a n 4 3 0 0 6 8 , C h i n a )
滞环控制
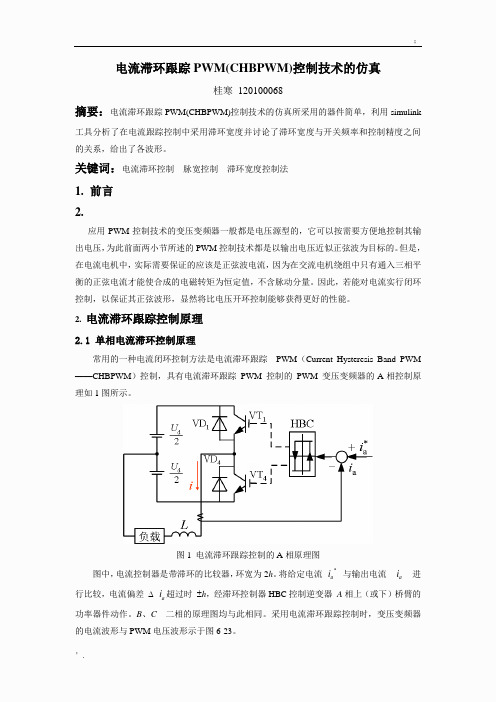
电流滞环跟踪PWM(CHBPWM)控制技术的仿真桂寒 120100068摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink 工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率与控制精度之间的关系,给出了各波形。
关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2.应用PWM 控制技术的变压变频器一般都就是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都就是以输出电压近似正弦波为目标的。
但就是,在电流电机中,实际需要保证的应该就是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
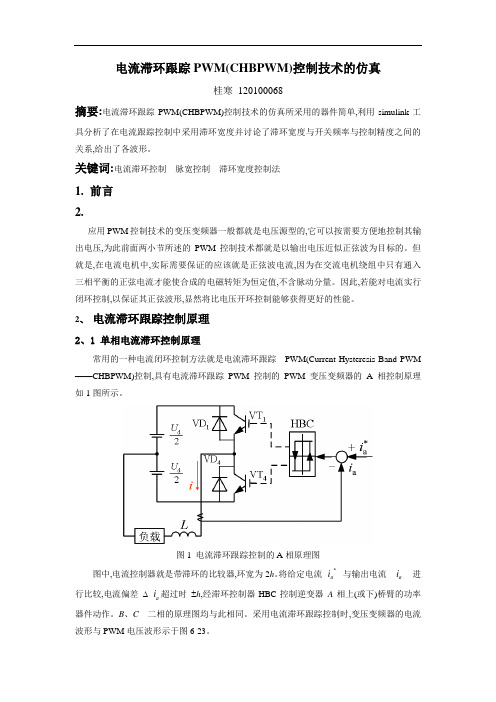
2、 电流滞环跟踪控制原理2、1 单相电流滞环控制原理常用的一种电流闭环控制方法就是电流滞环跟踪 PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。
图1 电流滞环跟踪控制的A 相原理图图中,电流控制器就是带滞环的比较器,环宽为2h 。
将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ∆ a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。
B 、C 二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
⏹ 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使a i 增大。
当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ⏹直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。
基于矢量控制的PMSM位置伺服系统电流滞环控制仿真分析

点) 位置对正弦波进行采样时 ,由阶梯波与三角波 的交点所确定的脉宽 ,在一个载波周期 (即采样周 期) 内的位置是对称的 ,这种方法称为对称规则采 样 。该方式可以使得输出的电压较非对称采样规 则高 ,同时使微处理器工作量减少 。
图 4 电流滞环跟踪控制电流波形示意图
3. 2 三角载波比较方式的电流滞环控制 采用三角载波比较方式基本原理是 :把指令
2 PMSM 位置伺服系统矢量控制 方案
建立 PMSM 及其驱动器的传递函数 。以凸
19
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved.
电气传动 2006 年 第 36 卷 第 6 期
基于矢量控制的 PMSM 位置伺服系统电流滞环控制仿真分析
装式转子结构的 PMSM 为对象 ,在假设磁路不饱
和 ,不计磁滞和涡流损耗影响 ,空间磁场呈正弦分
布的条件下 ,当永磁同步电机转子为圆筒形 ( L d
= L q = L ) ,摩擦系数 B = 0 , 得 d , q 坐标系上永磁
电气传动 2006 年 第 36 卷 第 6 期
输出正电平 ,驱动上桥臂功率开关器件 S1 导通 , 此时逆变器输出正电压 , 使实际电流增大 。当实 际电流增大到与给定电流相等时 , 滞环控制器仍 保持正电平输出 , S1 保持导通 , 使实际电流继续 增大直到达到 ia = iaref + h , 使滞环翻转 , 滞环控制 器输出负电平 ,关断 S1 ,并经延时后驱动 S4 。
Abstract :Hysteresis2band current2co nt rol scheme of PMSM po sition servo system based o n vector co nt rol is analyzed deeply. For t he sake of high2performance current2loop in po sitio n servo system , we st udied general hysteresis2band current2cont rol and t riangular carrier wave hysteresis2band current2cont rol. Simulatio n models of t he two mode are build in Matlab , by t he simulatio n analysis , we can know t hat general hysteresis2band cur2 rent2cont rol will seriously influence o n performance of system , and triangular carrier wave hysteresis2band cur2 rent2cont rol can be used for good cont rol perfo rmance. When t riangular carrier wave hysteresis2band current2 co nt rol is used , analytical result s are good agreement wit h t he simulation result s , and t he result s can p rovide t heoretical basis fo r t he design of servo system.
基于数字化滞环电流跟踪比较控制的并联有源滤波器研究
uto 1 … m k d d u  ̄ l i . 0 l P
高新 技 术
基 数字 滞 流 踪比 控 并 有 滤 器 究 于 化 环电 跟 较 制的 联 源 波 研
程 海 婴
( 阜新矿务局职工 大学专业部 , 辽宁 阜新 130 ) 2 0 0
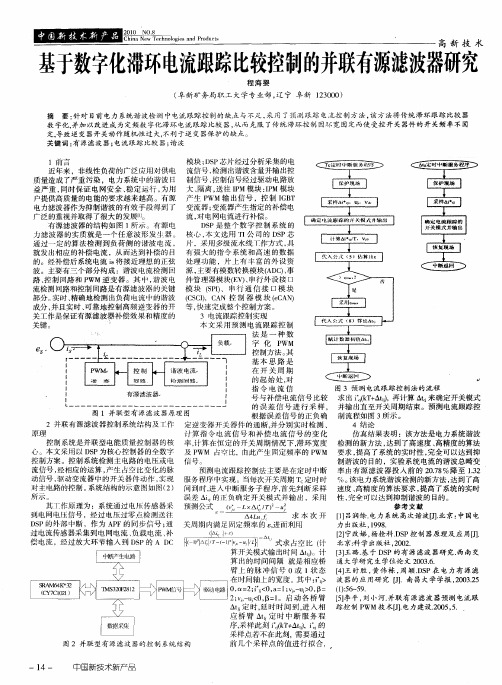
摘 要 : 对 目前 电力 系统谐 波检 测 中电流跟踪 控 制 的缺 点 与不 足 , 用 了预测 跟踪 电流控 制 方 法 , 方 法将 传统 滞 环跟 踪 比较 器 针 采 该 数 字化。 并加 以改进 成 为定 频数 字化 滞环 电流 跟踪 比较 器 , 而克服 了传 统 滞环控 制 因环 宽 固定 而使 受控 开关 器件 的开 关频 率不 固 从
1前 言 近 年来 ,非线 性 负荷 的广泛 应用 对供 电 质量造 成 了严 重污 染 ,电力 系统 中 的谐 波 日 益严 重 , 同时保 证 电 网安 全 、 定运 行 , 用 稳 为 户提供 高质量 的电能 的要求 越来 越 高 。有 源
— — — — — — — . — — — . — — — — — — — — — — — — — — — — — — — — — — — — — — ..
星
一
—
—
—
—
—
图 2并联 型有 源 滤波 器的控 制 系统 结构
采 样 点若不 在此 刻, 要通 过 需 前 几个 采 样点 的值 进 行 拟合 ,
一
1 4一
中国新技术新产品
定. 致逆 变器开 关动作 随机 性过 大, 利于逆 变 器保 护 的缺点 。 导 不 关键 词 : 源滤波 器 ; 有 电流跟踪 比较 器 ; 波 谐
模块 ; S D P芯 片经过 分 析采集 的电 t逭 对 噜 断 藤 络 “ J 流信号 , 检测 出谐 波含量 并输 出控 制信号 , 控制 信号 经过驱 动 电路放 大、 隔离 , 往 IM模 块 : M 模块 送 P I P 产生 P WM 输 出 信号 ,控 制 IB GT I 掸 , , l 袋A ~ v 电力滤波 器作 为抑制 谐 波 的有 效 手段 得到 了 变 流器 ; 器产生 指定 的补偿 电 变流 流 , 电网 电流进行 补偿 。 对 广 泛 的重视并 取得 了很大 的发展 l l 】 。 椭 j 电 洫 j 黥 的 _横 代 外 墒 f ; i = l } { 芄 } _ ; 有 源滤 波器 的结 构如 图 1 示 。有源 电 所 D P是 整 个 数字 控 制 系统 的 S l 力滤 波 器 的实 质就 是一 个 任 意波 形 发 生器 。 核 心 , 文选 用 T 公 司 的 DS 本 I P芯 l {A . } | i rv 辫・ 通 过一 定 的算 法 检 测到 负荷 侧 的谐 波 电流 , 片 ,采用 多级 流水线 _ 作 方式 , _ r = 具 ● 就 发出相 应的 补偿 电流 ,从而 达 到补偿 的 目 有 强 大 的指令 系统 和 高速 的数 据 {八公 ℃( ) , l I 5 辣i j c 的。经补偿 后 系统 电流 i将 接近 理想 的正 弦 处 理功 能 ,片 上 有 丰 富 的外 设 资 s q断瑶嘲 J 波 。主要有 三个 部分 构成 :谐 波 电流检 测 回 源 , 主要 有模数 转换 模块 ( D )事 A C、 路 、 制回路 和 P 控 WM逆 变 器 。其 中, 波 电 件 管理器 模 块(V 、 谐 E )串行 外设 接 口 流检 测 回路 和控 制 回路 是 有源 滤波 器 的关键 模 块 f I 串行 通 信 接 口模 块 S) P、 部分 。 实时 、 精确地 检测 出负荷 电流 中的谐 波 fS I A 控 制 器 模 块 f A ) C C) ,C N e N C 成分 , 并且实 时 、 可靠地 控制 高频 逆 变器 的开 等 , 速完成 整个 控制方 案 。 快 关工 作是保证 有 源滤 波器补 偿效 果 和精度 的 3电流 跟踪控 制实 现 代凡 () “ I I- 凳 s 搿 ; - - ^ - 关键 。 本 文 采 用预 测 电流 跟踪 控 制 ‘ 法 是 一 种 数 l l 衲 I II 括 讯 “ 城敬 字 化 P WM es 控 制方 法 。 其 基 本 思 路 是 在 开 关 周 期 的起 始 处 , 对 图 3 预测 电流跟 踪控 制 法的流程 指 令 电 流 信 I 有源滤波 器. j 号 与补偿 电流 信号 比较 求出 i( + t,  ̄k A 再计算 △ T ) t来确定开关模式 j 的 误 差 信 号 进 行 采 样 , 并输 出直 至开 关周 期结 束 。预测 电流 跟踪控 图 1并联 型有 源滤 波器原 理 图 根据 误 差信 号 的正 负确 制 流程如 图 3 示 。 所 2并 联有 源滤 波器 控制 系统 结构 及 T作 定逆 变器 开关 器 件 的通 断, 分别 实 时检 测 、 并 4 结论 原理 计 算 指 令 电流 信 号 和 补 偿 电 流 信 号 的 变 化 仿真 结果 表明 :该 方法是 电力 系统 谐波 控制 系统 是并联 型 电能 质量 控制 器 的核 率 , 算 在恒 定 的 开关 周期 情 况 下 , 宽 度 检测的新方法 , 计 滞环 达到了高速度 、 高精度 的算法 心。本文采 用 以 D P为核 心控 制器 的全数 字 及 P S WM 占卒 比, 巾此产 生 同定频 率 的 P 要 求 , WM 提高 了系统 的实时性 , 全可 以达 到抑 完 控 制方案 。控制 系统 检 测主 电路 的 电压或 电 信 号 。 制 谐波 的 目的 ,实验 系统 电流 的谐 波 总畸变 流信号 , 经相应 的运 算 , 生 占空 比变 化的脉 产 预测 电流跟 踪 控制 法主要 是 在定 时 中断 率 由有 源 滤 波器 投 入 前 的 2 . %降 至 1 2 O8 7 . 3 动 信号 , 动变 流器 中的 开关器 件 动作 , 驱 实现 服务 程序 中实现 。当每次 开关 周期 T 定 时 时 %。 电力 系统谐 波检 测的新 方法 , 该 达到 了高 对 主电路 的控制 。 统结构 的示 意图 如图 ( ) 间 到时 , 人 中断 服 务 子程 序 , 判 断 采样 速 度 、 系 2 进 首先 高精 度 的算 法要 求 , 高 了系统 的实 时 提 所示 。 误差 △ 的 负确定 开 关模 式 并输 出 ,采用 性 , i 完全 可 以达到抑 制谐 波的 目的 。 其T作 原理 为 :系统通 过 电 传感 器采 预测公 式 ( L △ /)一 2 v × £ T。 “ , 参 考 文 献 到电 网电压信 号 ,经过 电压 过零 点检 测送 往 A4 “ f L , 求 本 次 开 [ 吕润馀 . 1 】 电力 系统 高次谐 波 [ . : J 北京 中国电 ] D P的 外部 中断 ,作 为 A F的 同步 信 号 ; S P 通 关 周期 内满 足同定 频率 的 e 而利用 力 出 版 社 .9 8 19. , 进 c 】 ¨ △ + 1 过 电流传 感器采 集 到 电网 电流 、 负载 电流 、 补 【 宁改娣 , 拴科 .S 控 制 器原 理及 应 用『 . 2 】 杨 DP J ] J — — — — — — — —— — 一 , ^ — — — —— — — — — —— — 、 偿 电 流 ,经 过放 大环 节输 入 到 D P的 A D l 1 / 【) S C { ) r _。 【 一 1 _ I1 式求 占 比 (’ 北京 : 学出版社 ,0 2 / ) 空 计 科 20 . 算 开关模 式输 出时间 △ t 。计 『1 . ) 3王璐 . 于 D P的有 源 滤波 器研 究 . 南 交 基 S 西 算 的时 间 间隔 就 是相 应 桥 通 大 学研 究生 学位论 文 2 0 .. 0 36 臂 上 的脉 冲信 号 0或 1 态 『】 时胜 , 伟 栋 , 颖 .S 状 4王 黄 周 D P在 电 力有 源 滤 在 时间轴 上 的宽度 。其 中 : > 波器 的应 用研 究 . 昌大 学 学报 , 0. 南 2 35 0 2 0 = l 0,=Iv一 1O p= () 6 5 . , 2 1 a ;j u> , 1:  ̄ 9 < 。 5 2V 1 0B 1 ; I , = 。启 动 各 桥 臂 f 李 平 , 小 河. 有 源 滤波 器预 测 电流跟 j < 5 1 刘 并联 △ 。 时 , 时 时 间 到 , 入 相 踪控 制 P t定 . 延 进 WM技 术 叭 电力建 设.0 5 5 20 ,. 应 桥 臂 △ 。 时 中断 服 务 程 t定 , 序, 样此 刻 i ( + t , 的 采 *k A  ̄T )
滞环控制
电流滞环跟踪PWM(CHBPWM)控制技术的仿真桂寒 120100068摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。
关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2.应用PWM 控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都是以输出电压近似正弦波为目标的。
但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。
因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
2. 电流滞环跟踪控制原理2.1 单相电流滞环控制原理常用的一种电流闭环控制方法是电流滞环跟踪 PWM (Current Hysteresis Band PWM ——CHBPWM )控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。
图1 电流滞环跟踪控制的A 相原理图图中,电流控制器是带滞环的比较器,环宽为2h 。
将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ∆ a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。
B 、C 二相的原理图均与此相同。
采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
⏹ 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使a i 增大。
当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ⏹直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。
基于空间矢量的滞环电流跟踪控制策略的仿真研究

2 0 1 3年 2月
上
海 电 力 学 院 学 报
Vo 1 . 2 9, No. 1 F e b. 2 01 3
J o u r n a l o f S h a n g h a i Un i ve r s i t y o f El e c t r i c P o we r
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6—4 7 2 9 . 2 0 1 3 . 0 1 . 0 1 6
基 于 空 间 矢量 的滞 环 电流跟 踪 控 制 策 略 的仿 真研 究
陈志华 , 曹 以龙
( 上海 电力学 院 电子与信息工程学院 , 上海 2 0 0 0 9 0 )
E — ma i l : 3 8 0 6 4 0 3 8 4 @q q . c o m.
上
海
电
力
学
院
学
报
2 0 1 3芷
1 控 制原 理
1 . 1 数学 模型及 原 理 三相无 中线 VS R拓扑 结构 如 图 1 所示
S c S b S a
式( 6) 表明, 对 于 给 定 的 具 有 零 误 差 电 流
Ab s t r a c t :
A v a r i a b l e 一  ̄e q u e n c y h y s t e r e s i s c u r r e n t c o n t r o l me t h o d b a s e d o n Vo l t a g e S p a c e Ve c t o r
p o we r il f t e r a r e d e s i g n e d b a s e d o n t h i s c on ro t l t a c i t c, a n d t h e s i mu l a io t n r e s ul t s p r ov e t h e f e a s i b i l i t y o f t h i s c o n t r o l l i n g t a c ic t . Ke y wo r ds: h y s t e r e s i s c u r r e n t c o nt r o l ;SVP W M ;c u r r e n t ra t c k i n g
电流滞环跟踪spwm

课程设计(论文)任务书电气与电子工程学院电力牵引与传动专业班一、课程设计(论文)题目:电流滞环跟综PWM(CHBPWM)控制技术的仿真二、课程设计(论文)工作自 2013年6月16日起至2013年6月21日止。
三、课程设计(论文) 地点: 电气学院机房四、课程设计(论文)内容要求:1.本课程设计的目的(1)熟练掌握MATLAB语言的基本知识和技能;(2)熟悉matlab下的simulink和simpowersystems工具箱;(3)熟悉构建三相电流跟踪滞环控制系统的仿真模型;(4)培养分析、解决问题的能力;提高学生的科技论文写作能力。
2.课程设计的任务及要求1)基本要求:(1)要求对主电路和脉冲电路进行封装;(2)仿真参数为:E=100-300V; f=50HZ; 带宽2h; 步长h=0.0001s,其他参数自定;(3)给出调制波原理图、相电压、相电流、线电压、不同器件所承受的电压波形以及频谱图,要求采用subplot作图;(4)选取不同参数进行仿真,比较仿真结果有何变化,给出自己的结论。
2)创新要求:封装使仿真模型更加美观、合理3)课程设计论文编写要求(1)要按照课程设计模板的规格书写课程设计论文(2)论文包括目录、正文、心得体会、参考文献等(3)课程设计论文用B5纸统一打印,装订按学校的统一要求完成4)答辩与评分标准:(1)完成原理分析:20分;(2)完成设计过程:40分;(3)完成调试:20分;(4)回答问题:20分;5)参考文献:(1)刘卫国.MATLAB程序设计与应用(第二版). 北京:高等教育出版社,2008.(2)刘志刚.电力电子学.北京:清华大学出版社、北京交通大学出版社,2004.(3)李传琦. 电力电子技术计算机仿真实验.电子工业出版社,2006.6)课程设计进度安排内容天数地点构思及收集资料2图书馆编程设计与调试1实验室撰写论文2图书馆、实验室学生签名:年月日课程设计(论文)评审意见(1)完成原理分析(20分):优()、良()、中()、一般()、差();(2)设计分析(20分):优()、良()、中()、一般()、差();(3)完成调试(20分):优()、良()、中()、一般()、差();(4)翻译能力(20分):优()、良()、中()、一般()、差();(5)回答问题(20分):优()、良()、中()、一般()、差();(6)格式规范性及考勤是否降等级:是()、否()(7) 总评分数\优()、良()、中()、一般()、差();评阅人:职称:年月日摘要滞环比较跟踪控制是一种非线性砰-砰控制方法,在各类闭环跟踪控制系统中广泛应用。
并网逆变器输出电流滞环跟踪控制技术研究
并网逆变器输出电流滞环跟踪控制技术研究1. 本文概述随着可再生能源在全球能源结构中占据越来越重要的位置,如何高效地将这些能源并入电网成为了一个亟待解决的问题。
并网逆变器作为连接可再生能源与电网的关键设备,其性能直接影响到整个系统的稳定性和效率。
在众多并网逆变器控制技术中,输出电流的精确控制尤为重要,它不仅关系到电能质量,还影响到电网的稳定运行。
本文旨在深入研究并网逆变器的输出电流滞环跟踪控制技术。
本文将介绍并网逆变器的基本原理及其在电力系统中的作用。
接着,将详细阐述滞环跟踪控制技术的理论基础和关键优势,包括其在抑制谐波、提高系统响应速度和稳定性方面的贡献。
本文还将探讨该技术在实际应用中可能遇到的挑战和解决方案,以及如何通过优化算法进一步提升控制性能。
通过对现有文献的综述和理论分析,结合仿真实验和实际案例研究,本文期望为并网逆变器的控制技术提供新的见解,并为相关领域的研究者和工程师提供实用的参考和指导。
2. 并网逆变器基本原理并网逆变器是一种电力电子设备,它的主要功能是将直流电(DC)转换为交流电(AC),以便与电网系统并联运行。
在太阳能光伏系统、风力发电系统以及其他可再生能源系统中,逆变器是不可或缺的核心组件。
逆变器不仅负责电能的转换,还需要确保输出电流与电网电压同步,以实现有效的能量交换。
并网逆变器的工作原理基于开关电源技术,通过高频开关器件的快速开关动作,将直流电源转换成具有一定频率和幅值的交流电。
这些开关器件通常由晶体管、IGBT(绝缘栅双极晶体管)或其他半导体器件构成。
逆变器内部的控制系统根据电网电压的实时信息,调节开关器件的工作状态,以实现对输出电流的精确控制。
为了确保逆变器的输出电流能够与电网电压保持同步,通常采用一种称为“滞环控制”的技术。
滞环控制是一种简单而有效的电流控制策略,它通过设定两个电流幅值的界限(滞环上下界),来控制开关器件的导通和关断。
当输出电流超过上限时,逆变器会调整开关状态以减小电流当电流低于下限时,逆变器则会增加电流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分 别 介 绍 了克 服这个缺 点 的 一 些方法 。
二 多 万 尸 /
. 2
同步开关
法 控制中的关系
对于 采用同步
开关 法 的 电流 跟 踪
沂粥抓‘叹斋{合{“
\
\
to
t-
S 二 S卜S t
U。
U‘
一1
1
1 一 Z u /3
u/3
U。 u /3
t 1 tZ tZ t3 t3 t 4
1
1
1
1
1司
l一 1一 l
通过 逆变器开关状 态的改变 , 使逆 变 器输 出 的 电 压 方 向 改 变 , 从 而 使 实 际 电流 方 向 改 变 , 回到 环 内来 。 参 见 图 显 。
然, 滞 环 宽度 越 小 , 实 际 电流
忽略 丈与 元 开关 状 态 切 换时 的 死 区 延时 。 由 于 逆变器 开 关频 率 很 高, 定 子 漏感 的 影 响 远
图
若以 一 ,
,
分别对应于
三 相 对 、
、。
,
十 “
。
艺 ‘ 一 。 , 可 写 成
一 。。 以
了
关断 , 一 时情况相反 。
, 一 对 应 于 梦导 通 , 再 令 电机 三 相 绕 组 中性点
对 直流 电源 中性 点 的 电 压 为 , 则 有
会一 。·
一 了
, 一 犷·
将
其中
严 一 沁 即为电机各相承受的实 际 电压 。
的整 数倍 。 然 而 , 与 叮 之 间 的误 差 不 象滞环 宽 度 控制
法 那样在环 宽之 内, 二者 之间 的误差和采 样频率 有什
么 关 系 也 是 我 们所 关 心 的 。
三 、 电流 滞环跟 踪控 制的分 析
二 、 电流 滞环 跟踪 控制 的二种 方 法
滞环宽度控制法 这 种方法 是设 置 一 个滞 后 比较 器 , 将 给 定 参 考 电流 ‘ 与 实 际 电流 , 比 较 , 当 二 者 之 差超 出滞 环 的半 宽 。 时,
一 S。
一 S。
一 凡门
+
25 。
一 S;
一S 十 25 _
阵 匡 !比 ‘ J !l! |
盖
(11 )
再 看 三 相 时 的 开 关 频率 。 从 式 (11 )可 看 出 , 任 一 开
关状 态 凡 的变化 , 不 仅使本相 , 而 且使 电机其 他叹 相
的输 入电压都 发生变化 , 从而使 各相 电流变化率 都发
、誓
山
‘ 、
八
十 又一 下甲 “ “不
乙
厂
一 吸乙。 十 乙 一 万 “
在
段,
成一 一 一
一
。
一
习飞 飞
成 广 ,
、。
八
十 下 一 “
丫
汉石
山
广
二厂 “
丫卜 令
—— 得 山
于是 一 个 开 关周 期 为
,
之万 、
十 又七 召 十 石 一 丁丁
口石
厂 下下蕊下
乙祝 人
一 二州 ‘
十艺
,
— 不 二
,
又
—了 一 一 “‘ 任
然 而 尽 管 许 多 文 章 报 道 了交 流 传 动 系 统 中 采 用 电 流 滞 环 跟 踪 控 制 , 但 对 它 的 分 析 却较 少 。 本 之将 对 它 的 一 些 内部关 系 作 初 步 探 讨 。
乞
平。
在 这 种方法 中, 显然 介
越 高 , , 越接 近 汀 , 并 且逆
变器 的开关周 期总 是 几
一1
1
1
1
一1
l 一1
一1
一1 一 1
1
一3
一1 一1 一1
一3
一
一
2
一1
一1
一2
1
1
一1
2
一1
一1
一l
2
0
0
0
从 表 中 可 以 看 到 在 三 相 滞 环 电流 控 制 中 , 输入 电
机 的相 电 压 (即 0 .55 , u
一V
为 二 )
0、
士u /3
,
或 土 Zu
/3 ,
而
在 单 相 或 三 相 中线 接 直 流 电源 中性 点 时 , 为 士 可2 。 倘
系 并 给 出 了 实验 结 果 。
【关 键 词 】 电 流 滞 环 控 制 脉 宽控 制
前
言
电 流 滞 环 跟踪 控 制 在 交 流 调 速 系 统 中得 到 一 越 来 越 多 的 应用 。 它 的 基 本 思 想就 是将三相 定 子 电 流给 定
信 号 与检 测 到 的 相 应 定 子 电 流 信 号 比 较 , 若 实 际 电 流 大 于给定 值 , 则通过 逆变 器 使之减 小 , 反之 增大 。 这 样 , 电 流 波形 围 绕 给 定 正 弦波 作 锯 齿 状 变化 , 并 将 偏 差 限 制 在 一 定 范 围 内 。 同 时 , 电压 波 形 成 为 宽 度 被 调制 的
生变 化 。 图 7 显 示 了 i 的 一 个 开 关周 期 内 , 二 相 电流 可 能 出 现 的 情况 及相 应 的刀l关 状 态 与 电 机 相 电压 U (例
如 时 从 图 中可 以 看 到 ,
a
j=
,u 。 =
(25
一 S 一 5 。
‘u
。
)
/6 )
,
对 于 三相 电流 滞 环 控 制 , 由于 在 一 个 开 关周 期 内其他
位 于 略 大 于 ;: 的 A 点 , 于
是 在:
采 徉瞬 间 , ‘ S
“ ~
一1 ,
辈
便 降 过 后 六
电流滞环跟踪控制分析
上海 轻工业 高等 专科 学校 上海工业大学
马 立华 陈 伯时
【提 要 】 采 用 电流 滞 环 跟 踪 控 制的
逆 变器 硬 件简 鱿 , 性 能 较好 分 析 了在 电流 跟 踪 控 制中 采用 滞环 宽度 及
同 步 开关 的 二 种 方 法 , 探 讨 了滞 环 宽 度 与 逆 变 器 开关 频 率 间 的 关 系 , 及 同 步 开 关 法 中 电 流 误差 与 同步 开 关 频 率 间 的关
若把 v 、 看成一个附加值 , 显然也可处理成中性线相连
的情况 , 参见 图 6 。
于 习T 一 考 虑 式 u/ 2 一
(9) 及表 1 , 三
。·
Tl 相 滞 环 电 流
VN
匕乞当 形跟数写式踪学 成 控 模如 制 型下 的 可
几|冲 11巨 习|11
ZS a 广l|elL|
兰d t
一 兰6I. 一 S “
作 锯 齿 状 变 化 时,
显然
。。
下降,
_
: 子 上升 时 电流 误 差
DB
要
比二者均
上升
时的 E F 大 ( 即 二 者 导 数 符 号 相 异 时 比 相 同 时 电 流 误
差要大 ), 我 们选 前 一种 情 况 作 讨 论 设 在 t。 时刻 禹
:1 卜 尸l!|卫!!IL
土少卜 山
E>F
电机 电流处 于失 控状
态 , 其绝 对 数 值 逐 步 减 小 , 即 向正 弦 波 内侧 变 化 .于 是
6 · 电 气传 动 和 自动 控 制 ·
二 继 续 减 小 , 超 出 环 宽 , 直 到 时刻 , ‘ 变 为 一 三 , 相 流退 出 零 矢 量状 态 , , 。 才 会 回 到 环 内来 。 文献 〕 〕
坏波形 · 电 流 滞 环 跟 踪 控 制 的逆 变器 实 际 上 已构成 了 砰 一 砰控制的电流闭环 、 若忽略逆变器延迟 时间 当偏差较 小 时 , 电机 电流 可以 被 认 为 是 随 时 可 控 的 。 这 就 将 电 机
越 接 近 参考 电流 , 但 广 与 的 开 关 频 率 越 高 。
上升, 到 过
点 后 , 。 二 一 , 电流 沿
况 分别 写 成
,
仃
下降 , 这样式 可按两种情
对
段,
。
一
。
对
段,
盆
。
一
一。
喇
若 心 的变化 率超 过
、
二 式 的 关 系 时, 。
就 无 法跟 踪 。
从 图 中的 几 何 关 系 可 以 求 出 开 关 频 率 。 二左
歇
一 一
一
。
二上 五
蔡 、访丁
滞环 宽 度 控制法 为 了 便 于 深 入 分 析 三 相 电 流 滞 环 跟踪 控 制 中 的关 系 先 分 析 相 一相 。 图 中 。 是 电机 的 反 电势 正 弦 量 , 是 定 子 漏 感 。 以 。 一 表示 才导 通 , 元 关断 “ 一 〕表 示 之关 断 , 入 导 通 。 此 外 , 为分析 方 便起 见 , 作 以 一 「假 定
乙。 十 石 一 下勺 “
、
一 丫 一 又也。 十
订
一
、。 ‘
“
或 开关频率
广、 。
乙入
戈一 丁 少‘
“石
专一
·
一 毗‘“ “ ’‘
了
切去二。。 、
《电 气 自动 化 》 年 第 期
据此 , 可以得 出这祥 一 些 结论
开关 频 率 和 环宽 成 反 比 。
定子 电流 角 频 率 。 越 低 , 转 速 越 低 , 反 电 热 瓦
十
图
为相 应的线
路 。 当 心 汀 时 , 电压 比 较