北京理工大学2006年研究生入学考试《自动控制理论》试题
北京理工大学2006学年《自动控制原理》期末考试 答案与评分标准(A卷)(缺试题)

自动控制理论(一)答案一. (20分)解:(1) (10分) c r U U U -=2; 22U s C I ⋅=;222I R U R ⋅=;221R R U U U +=;21111I U R I R +=;111I s C U ⋅= ;12U U U R c += 。
消除中间变量得,1)2(1)()()(2122121221++++++=s T T s T T s T T s T T s U s U r c ,其中,,C R T 11=,C R T 22=。
解:(2) (10分)3211G G G P =322121321243G L -=;424213212331G G G H H G G G G ++++=∆;411G +=∆;421G +=∆;4242132124321331)1()2()(G G G H H G G G G G G G G s ++++++=Φ。
(允许使用方框图简化)二. (20分)解:(1) (10分) 22222)5()(nn ns s k s k s k s ωζωωτ++=+++=Φ;7.0%6.4=⇒=ζσp ;588.0=⇒=n p t ω;252==n k ω;08.0=τ;解:(2) (10分) k s k s kG s s GH G G G s e +++-+=++-=Φ)5(511)(2br 2br τ;s k ss G 2.05)(br ==。
三. (15分)解:(1) (6分) 劳斯计算表首列系数变号2次,S 平面右半部有2个闭环极点,系统不稳定。
333206633101234s s s s s -解:(2) (9分))1)(1()1()(312+++=s T s T s T K s G ;1020log 20=⇒=K K ;5002.0/11==T ;05.020/12==T ;05.0200/13==T ;)1005.0)(150()105.0(10)(+++=s s s s G ;2.0=c ω;8.83001.0arctan 10arctan 01.0arctan )(-=--=∠j G ;2.96)(180=∠+=j G γ,闭环系统的稳定。
北京理工大学自动控制理论04-07真题解析
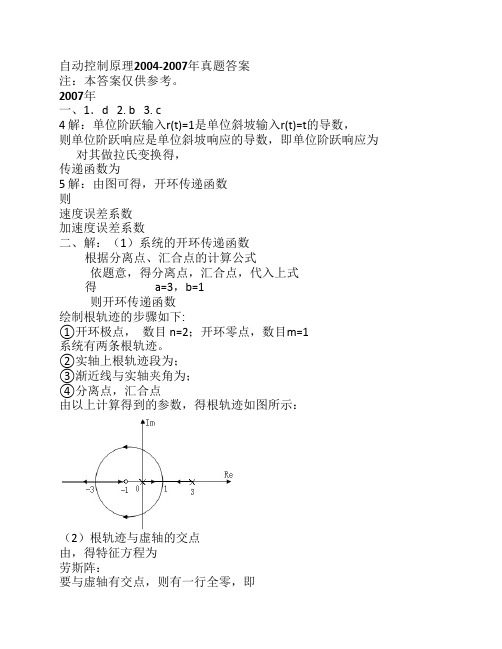
由以上计算得到的参数,得根轨迹如图所示:
(2)欲使超调量,应有 由,得 过坐标原点做与负实轴夹角为的直线,交根轨迹于A点。设A点坐标
为,显然,将其代人特征方程,可得 即当时,可使,闭环极点从()开始,沿根轨迹方向移动。
2)用根轨迹方法验证: 绘制根轨迹步骤如下: ①开环极点, 数目 n=4; 开环零点,数目m=1。系统有4条根轨迹。 ②实轴上根轨迹段为,; ③渐近线与实轴夹角为; 渐近线与实轴交点为; ④与虚轴的交点: 时, 得对应的 与虚轴的交点是
根据以上参数地根轨迹图如下:
由根轨迹图可知,当,时,闭环系统稳定。 可见,与由Nyquist曲线得到的结论是一致的。 (4)K=1时,闭环系统是稳定的,讨论稳态误差是有意义的。
则 可见调节时间为1拍,即1个采样周期。 五、解:(1)由已知得 负倒特性曲线如图7.9所示: 曲线如图7.9所示: 由图可知,负倒特性曲线与曲线有交点。所以存在自持振荡,并且 是稳定的自持振荡。(由不稳定区稳定区)
图7.9 系统曲线和曲线 (2)由,得 由①得, 当时, 由①、②得, 当时, 所以h的范围是 六、解:(1)由图可知,环节A的传递函数为:; 环节B的传递函数为:; 环节C的传递函数为:。 开环系统的总传递函数为:,系统结构图如图8.4所示:
1) 与负实轴的交点: 由,此时 即与负实轴的交点是(-0.83,0);
2) ; 3) ; Nyquist曲线如下:
(3) 1)由Nyquist曲线确定使闭环系统稳定的K值;如图所示: 当-0.83K>-1时,即K<1.2时,Nyquist曲线不包围(-1,j0)点,即N=0,
16秋北理工《自动控制理论I》在线作业 辅导资料
北理工《自动控制理论I》在线作业一、单选题(共 20 道试题,共 60 分。
)1. 一阶系统的阶跃响应()。
. 无超调. 当时间常数较大时有超调. 当时间常数较小时有超调. 有超调正确答案:2. 二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为()。
. 0.6. 0.707. 0. 1正确答案:3. 若系统的开环传递函数为,则它的开环增益为()。
. 1. 2. 5. 10正确答案:4. 单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于(). 0. 4sqrt(2). 16. 无穷正确答案:5. 分析的性能指标,哪个指标是反映相对稳定性的()。
. 上升时间. 峰值时间. 调整时间. 最大超调量正确答案:6. 典型二阶系统的超调量越大,反映出系统(). 频率特性的谐振峰值越小. 阻尼比越大. 闭环增益越大. 相角裕度越小正确答案:7. 系统在作用下的稳态误差,说明 ( )。
. 型别ν<2. 系统不稳定. 输入幅值过大. 闭环传递函数中有一个积分环节正确答案:8. 梅森公式主要用来()。
. 判断稳定性. 计算输入误差. 求系统的传递函数. 求系统的根轨迹正确答案:9. 确定根轨迹大致走向,一般需要用()条件就够了。
. 特征方程. 幅角条件. 幅值条件. 幅值条件+幅角条件正确答案:10. 已知单位反馈控制系统在阶跃函数作用下,稳态误差为常数,则此系统为()。
. 0型系统. I型系统. II型系统. 高阶系统正确答案:11. 主导极点的特点是()。
. 距离虚轴很近. 距离实轴很近. 距离虚轴很远. 距离实轴很远正确答案:12. 系统的动态性能主要取决于开环对数幅频特性的()。
. 低频段. 开环增益. 高频段. 中频段正确答案:13. 系统稳定的充分必要条件是其特征方程式的所有根均在根平面的()。
. 右半部分. 左半部分. 实轴上. 虚轴上正确答案:14. 系统的频率特性(). 是频率的函数. 与输入幅值有关. 与输出有关. 与时间t有关正确答案:15. 典型欠阻尼二阶系统,当开环增益K增加时,系统(). 阻尼比增大,超调量增大. 阻尼比减小,超调量增大. 阻尼比增大,超调量减小. 无阻尼自然频率减小正确答案:16. 下列哪种措施对提高系统的稳定性没有效果 ( )。
奥鹏北理工《自动控制理论1 》在线作业标准答案

C闭环极点数目
D开环零点数目
【答案】:A.B.C
27.按输入信号分类,控制系统可分为()。
【选项】:
A定值控制系统
B伺服系统
C程序控制系统
D开环系统
E闭环系统
【答案】:
28.按是否满足叠加原理分类,控制系统可分为()。
【选项】:
A线性系统
B开环系统
C非线性系统
D闭环系统
【答案】:
29.关于PI控制器作用,下列观点错误的有( )。
【选项】:
A错误
B正确
【答案】:B
37.控制系统的数学模型,既取决于系统的结构与参数,又取决于外作用及初始条件。
【选项】:
A错误
B正确
【答案】:A
38.积分环节的对数幅频特性曲线是平行于横轴的直线。
【选项】:
A错误
B正确
【答案】:A
20.适合应用传递函数的系统是()。
【选项】:
A单输入,单输出的线性定常系统
B单输入,单输出的线性时变系统
C单输入,单输出的定常系统
D非线性系统
【答案】:A
21.以下为非线性系统的研究方法的是()。
【选项】:A传递函数Βιβλιοθήκη B描述函数C相平面法
D李雅普诺夫法
【答案】:B.C.D
22.对于闭环控制的描述,正确的是()。
B阻尼比减小,超调量增大
C阻尼比增大,超调量减小
D无阻尼自然频率减小
【答案】:B
5.两典型二阶系统的超调量δ%相等,则此两系统具有相同的()。
【选项】:
A自然频率
B相角裕度
C阻尼振荡频率
D开环增益K
【答案】:B
2016-2017年北京理工大学自动化自动控制原考研参考书目-历年真题答案-新祥旭考研辅导班

新祥旭——唯一专注北京理工大学的考研辅导机构
一、专业信息介绍
控制科学与工程、检测技术、模式识别、导航、系 统工程、电气工程。
北理的自动化分为自动化和电气工程,在填报时, 会让你选定方向,其中自动化:控制理论与控制工程 (较好,录取比例较高,但2012相对来说难度有些增 加),检测技术与自动化装置(较难,复试时会刷些高 分考生,2011年刷了一个374的,2012又刷了许多高 分),模式识别技术(与双控差不多,但招生人数少 些,录取难度适中),系统工程(几乎都是调剂过去 的,难度较小),导航(慎报,很排外,2011年400+外 校才能考上,2102有些意外,325就能进复试)。电气 方面:分为电力系统及其自动化,电机与电器,电工理 论及新技术,近年发展势头很猛,估计以后越来越难考。 还有专业硕士,当你考的分数上了自动化大线,但 复试 没过时,可以调剂过去。
这个阶段应该视野向外扩展,在巩固习题集的基础上,多看些图书馆的其他参 考资料,对习题集进行补充,同时每隔几天做一套历年真题,虽然 09以前的真 题与现在变化很大,但不意味着可以不做,因为每年真题中都有基本方法 ,融 入在其中,对解题思路的形成有很大帮助。 我们也会提供仿真模拟题大家可以 穿插进行,即今天一套明天一套模拟,第三天认真查漏补缺。 4、冲刺阶段(12月-1月) 总结所有重点知识点,包括重点概念、理论和模型等,查漏补缺,回归教材。 温习专业课笔记和历年真题,这时可以相应的做专业课模拟试题。到 1月要调整 心态,保持状态,积极应考。
1.1.4 频率响应方法 掌握:频率响应的基本概念;典型环节的频率响应;开环系统的的频率响应;频 率响应的图示法;最小相位系统;由频率响应求传递函数;基于开环频率响应的 稳定性判据;稳定性裕量。 理解:闭环频率特性;基于频率响应的控制系统的串联校正。 题型及分值:选择填空题和解答题, 占总成绩的 15% 1.1.4 状态空间方法 掌握:状态转移矩阵的求取及其性质;状态方程的解;可控性和可观测性的基本 概念及其判据;状态空间表达式的规范型;状态空间的分解;可镇定性和可检测 性;状态反馈与极点配置;状态观测器的设计;带状态观测器的状态反馈。 题型及分值:解答题,占总成绩的 15%
19春北理工《自动控制理论1》在线作业答案
(单选题)1: 梅森公式主要用来()。
A: 判断稳定性B: 计算输入误差C: 求系统的传递函数D: 求系统的根轨迹正确答案:(单选题)2: 放大环节的对数幅频特性曲线是()。
A: 平行于横轴的直线B: 斜率为1的直线C: 逐渐增大至某一值的曲线D: 垂直于横轴的直线正确答案:(单选题)3: 最小相位系统的开环增益越大,其()。
A: 振荡次数越多B: 稳定裕量越大C: 相位变化越小D: 稳态误差越小正确答案:(单选题)4: 典型二阶系统的超调量越大,反映出系统()A: 频率特性的谐振峰值越小B: 阻尼比越大C: 闭环增益越大D: 相角裕度越小正确答案:(单选题)5: 系统的频率特性()A: 是频率的函数B: 与输入幅值有关C: 与输出有关D: 与时间t有关正确答案:(单选题)6: 系统在r(t)=t2作用下的稳态误差ess=∞,说明( )。
A: 型别ν<2B: 系统不稳定C: 输入幅值过大D: 闭环传递函数中有一个积分环节正确答案:(单选题)7: 已知单位反馈控制系统在阶跃函数作用下,稳态误差为常数,则此系统为()。
A: 0型系统B: I型系统C: II型系统D: 高阶系统正确答案:(单选题)8: 采用负反馈形式连接后,则 ( )。
A: 一定能使闭环系统稳定B: 系统动态性能一定会提高C: 一定能使干扰引起的误差逐渐减小,最后完全消除D: 需要调整系统的结构参数,才能改善系统性能正确答案:(单选题)9: 一阶系统的阶跃响应()。
A: 无超调B: 当时间常数较大时有超调正确答案:(单选题)10: 用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值。
A: 相位B: 频率C: 稳定裕量D: 时间常数正确答案:(单选题)11: 开环控制系统特征是没有()环节。
A: 给定B: 放大C: 反馈D: 执行正确答案:(单选题)12: 系统型次越高,稳态误差越()。
自动控制理论(控制类)2000答案
北京理工大学2000硕士研究生入学考试试题考试科目:自动控制理论(控制类)答案:1.(1)动态微分方程为i o o q q dtdq CR =+,系统的传递函数为11)()(+=s i o RC s Q s Q 。
(2)方框图简化过程略。
系统的传递函数为1)(1)()(22211122121++++=s R C R C R C s C C R R s R s Y 。
2.(1)系统的根轨迹图(略);(2)系统临界稳定的开环增益为K=260。
3.(1)开环频率特性极坐标图(略),闭环系统稳定时的T d 的临界值为T d =0.1。
(2)T d >0.1时,右半平面闭环极点数为:Z=P -2(a 1-b 1)=1-2(1-21)=0,系统稳定。
T d <0.1时,右半平面闭环极点数为:Z=P -2(a 1-b 1)=1-2(0-21)=2,系统不稳定。
4.(1)系统特征方程式为 ()0)0039.005.0()0339.0553.0()0164.0503.1(23=+-++++-+=K z K z z z D ;(2)系统稳定的K 值范围为0<K<37.44。
5.(1)写出此系统的状态空间表达式为[]⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡•••321321321001100301100010x x x y u x x x x x x(2)系统不稳定;(3)131)()(23++=s s s U s Y (4)系统矩阵A 的对角矩阵形式为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=Λ0519.05652.005652.00519.00001038.3。
北京理工大学2006年《自动控制理论》考研真题、答案与解析
=
8
5
网学天地()
又
2 α
=
2ζωn
=
4
⇒
α
=
0.5 ,所以: Gc
(s)
=
8(s + 2)
s+4
二、解:
(i) xˆ = Tx ,则 x = T −1xˆ ,代入系统表达式,可得:
⎧⎪T ⎨ ⎪⎩
−1 xˆ y=
= AT CT −1
−1 xˆ xˆ +
+ Bu Du
⎡0 0 0 ⎤
(ii)设 A = ⎢⎢1 0
0
⎥ ⎥
,求
e Jt 和e At
。
⎢⎣0 1 −1⎥⎦
1
网学天地()
(iii)A 同(ii), B = [1 1 0]T ,C = [0 0 1] ,判断系统的可控性和可观测性。若
系统不可控或不可观测,确定不可控或不可观测的模态。
0 ⎤ ⎡1⎤
0
⎥ ⎥
⎢⎢1⎥⎥u
(t
−τ
) dτ
e−t ⎥⎦ ⎢⎣0⎥⎦
⎡1⎤
∫ = 3e−t + [1
−1
1]⎢⎢t + 1⎥⎥
t u (t −τ ) dτ
0
= 3e−t
⎢⎣ t ⎥⎦
所以, ∀u (t ),t≥0 ,均有 xT (0) x (t ) = 3e−t 。
(v)分别讨论如下:
⎡−1 0 0 0⎤
1)将
A
化为约当阵为
Aˆ
=
⎢ ⎢ ⎢
0 0
−1 0
0 0
0⎥⎥ 1⎥
,B
至少要有
2
个线性无关的列向量。因为
2006春《自动控制理论》研究生面试试题及答案
一、填空题(15分)1.下列时间函数,其拉普拉斯变换存在且收敛的是 A 、C 、D 。
(A) 2t (B)2t e (C) t t sin 2 (D) t e t +22.某时间函数f(t)的拉普拉斯变换为()()()213+++=s s s s F ,则f(t)的初值f(0)为 _1__ 。
3.已知系统输入输出关系为2x y =,其工作点为10=x ,则系统的小信号线性模型为 y=2x 。
4.已知二阶系统的极点为j s ±-=121,,则系统的调节时间为 4秒 。
5.已知系统开环传递函数为()()12+=s s Ks GH ,能使闭环系统稳定的K值为 不存在 。
二、基础题(55分)1.(10分)求函数()()32132+++=s s s s F 的逆拉普拉斯变换f(t) 解:(1) ()()()3321211132+++=+++=s s s s s s F (2) ()t t e t e t f --+=22.(10分)求下面系统的传递函数()()()s V s Y s T /=解:(1)前向通路增益43211G G G G P =(2)回路1增益5431G G G L =,回路2增益64322G G G G L =,两个回路互相接触。
(3)特征式64325432111G G G G G G G L L --=--=∆ (4)1P 与21L L ,都接触,所以11=∆ (5)()64325434321111G G G G G G G G G G G P s T --=∆∆=输入 V(s)G 3G 4G 2 G 1 输出 Y(s)3.(20分)已知某反馈系统的()()()21++=s s s Ks GH ,试画出∞<≤K 0的根轨迹草图。
(1)试设计参数K ,使闭环系统稳定;(2)若要求闭环系统主导极点的阻尼系数为7070.=ζ,计算此时主导极点位置及对应的K 值。
解:(1)系统特征方程为:02333=+++K s s sKK Ks ss s 0363210123- 所以60<<K 系统稳定。
北京理工大学2005年《自动控制理论》考研真题、答案与解析
1−ζ 2
≤16.3% ,应有 ζ ≥0.5 。
5
网学天地()
过坐标原点做与负实轴夹角为 60° 的直线,交根轨迹于 A 点。 设 A 点坐标为 (σ ,ω ) ,显然 ω = − 3σ 。代入特征方程 s 2 + 2 s + 10 + 10 K t s = 0 ,得:
移动。 三、解: (1)依题意得:
f ( s, λ ) = (1 − λ ) f1 ( s ) + λ f 2 ( s ) = (1 − λ ) ( s 3 + 6 s 2 + 12s + 8 ) + λ ( s 3 + 3s 2 + 4 s + 2 )
= s 3 + ( 6 − 3λ ) s 2 + (12 − 8λ ) s + 8 − 6λ
3
8 s2 + s + 2 3 s =0
=3
此时, λ = 1 ,当 0≤λ≤1 时,由根轨迹可知, f ( s, λ ) 均稳定。 四、解: (1)系统开环脉冲传递函数:
⎡1 − e −Ts 5 ⎤ −1 G(z) = Ζ ⎢ ⋅ ⎥ = 5 (1 − z ) Ζ 1 + s s s ( )⎦ ⎢ ⎥ ⎣ ⎡ ⎤ 1 −1 ⎢ 2 ⎥ = 5 (1 − z ) Ζ 1 + s s )⎦ ⎢ ( ⎥ ⎣ 1 ⎤ ⎡1 1 ⎢ s 2 − s + s + 1⎥ ⎣ ⎦
ωc ω ω − arctan c − arctan c ω1 ω2 ω3
当 ωc /ω1 = 100 , ωc /ω2 = 2 , ωc /ω3 = 0.1 时, γ = 20.28° 此时闭环系统稳定。