多体系统动力学-拓扑结构的描述
多体系统动力学2-拓扑结构的描述

二 拓 扑 结 构 的 描 述
多 体 系 统 动 力 学
树系统的规则标号方法
铰的方向一律背离零刚体B0 体的序号大于其内接体的序号 体的序号与其内接铰序号相同 B3 B4
4
H H
i
Bi B2
j
Bj
二 拓 扑 结 构 的 描 述
H2
H4
Z3
H3
B2 H 1 H2
2
B1
B0
5 6
H5
B1 H1
1
B5
B0
二 拓 扑 结 构 的 描 述
利用 Tji,可以把上式写成一个统一的公式
ωi ω0 T ji Ω j
1
5
(i 1, 2,...5)
或写成矩阵形式为:
01n T T
1n
1,1,1,...1
n个
T
该式是一个一般的公式,适用于任何系统。
多 体 系 统 动 力 学
关联矩阵和通路矩阵的特点
多 体 系 统 动 力 学
本节内容
问题:如何描述多体系统中刚体的运动?
二 拓 扑 结 构 的 描 述
内容1:R-W方法 内容2:多体系统的拓扑结构
多 体 系 统 动 力 学
R-W方法
ω1 = ω0 + Ω1 ω = ω + Ω + Ω 2 0 1 2 ω3 = ω0 + Ω1 + Ω3 ω = ω + Ω + Ω + Ω 0 1 3 4 4 ω5 = ω0 + Ω1 + Ω3 + Ω5
通路矩阵
通路矩阵可以很方便用于描述 系统内部相对运动的关系。如 图,设 B0 运动已知,每个刚体 相对其前置刚体(内接刚体) 的转动角速度为Ωi,而每个刚 体的绝对角速度为ωi,则有
了解计算机的网络拓扑结构
了解计算机的网络拓扑结构网络拓扑结构是计算机网络中的重要概念,它描述了计算机网络中设备之间的物理或逻辑连接方式。
了解计算机的网络拓扑结构对于构建和管理网络具有重要意义。
本文将介绍常见的计算机网络拓扑结构及其特点。
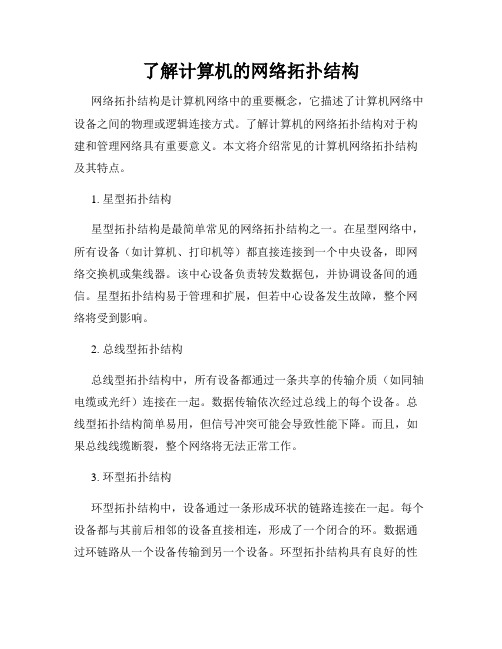
1. 星型拓扑结构星型拓扑结构是最简单常见的网络拓扑结构之一。
在星型网络中,所有设备(如计算机、打印机等)都直接连接到一个中央设备,即网络交换机或集线器。
该中心设备负责转发数据包,并协调设备间的通信。
星型拓扑结构易于管理和扩展,但若中心设备发生故障,整个网络将受到影响。
2. 总线型拓扑结构总线型拓扑结构中,所有设备都通过一条共享的传输介质(如同轴电缆或光纤)连接在一起。
数据传输依次经过总线上的每个设备。
总线型拓扑结构简单易用,但信号冲突可能会导致性能下降。
而且,如果总线线缆断裂,整个网络将无法正常工作。
3. 环型拓扑结构环型拓扑结构中,设备通过一条形成环状的链路连接在一起。
每个设备都与其前后相邻的设备直接相连,形成了一个闭合的环。
数据通过环链路从一个设备传输到另一个设备。
环型拓扑结构具有良好的性能和数据传输负载均衡的特点,但是当环上的某个设备出现故障时,整个网络的可用性将受到影响。
4. 网状拓扑结构网状拓扑结构是一种灵活且弹性的结构,其中每个设备都与其他设备直接连接,形成了多个互相连接的路径。
网状拓扑结构具有高度的冗余性和可靠性,即某个路径或设备发生故障时,仍然可以通过其他路径进行通信。
然而,网状拓扑结构的实现和管理成本较高。
5. 树型拓扑结构树型拓扑结构是将多个星型网络通过一个中心设备连接起来,形成树状结构。
每个星型网络可以有自己的中心设备,并与其他星型网络的中心设备相连。
树型拓扑结构可以方便地扩展和管理,但是如果中心设备或链路出现故障,整个分支将无法与其他部分通信。
6. 混合拓扑结构混合拓扑结构是综合采用以上多种拓扑结构的混合形式。
通过选择合适的拓扑结构组合,可以根据实际需求来构建复杂的网络。
多体系统动力学基本理论

多体系统动力学基本理论第2章多体系统动力学基本理论本章主要介绍多体系统动力学的基本理论,包括多刚体系统动力学建模、多柔体系统动力学建模、多体系统动力学方程求解及多体系统动力学中的刚性(Stiff)问题。
通过本章的学习可以对多体系统动力学的基本理论有较深入的了解,为具体软件的学习打下良好的理论基础。
2.1 多体系统动力学研究状况多体系统动力学的核心问题是建模和求解问题,其系统研究开始于20世纪60年代。
从60年代到80年代,侧重于多刚体系统的研究,主要是研究多刚体系统的自动建模和数值求解;到了80年代中期,多刚体系统动力学的研究已经取得一系列成果,尤其是建模理论趋于成熟,但更稳定、更有效的数值求解方法仍然是研究的热点;80年代之后,多体系统动力学的研究更偏重于多柔体系统动力学,这个领域也正式被称为计算多体系统动力学,它至今仍然是力学研究中最有活力的分支之一,但已经远远地超过一般力学的涵义。
本节将叙述多体系统动力学发展的历史和目前国内外研究的现状。
2.1.1 多体系统动力学研究的发展机械系统动力学分析与仿真是随着计算机技术的发展而不断成熟的,多体系统动力学是其理论基础。
计算机技术自其诞生以来,渗透到了科学计算和工程应用的几乎每一个领域。
数值分析技术与传统力学的结合曾在结构力学领域取得了辉煌的成就,出现了以ANSYS、NASTRAN等为代表的应用极为广泛的结构有限元分析软件。
计算机技术在机构的静力学分析、运动学分析、动力学分析以及控制系统分析上的应用,则在二十世纪八十年代形成了计算多体系统动力学,并产生了以ADAMS和DADS为代表的动力学分析软件。
两者共同构成计算机辅助工程(CAE)技术的重要内容。
多体系统是指由多个物体通过运动副连接的复杂机械系统。
多体系统动力学的根本目的是应用计算机技术进行复杂机械系统的动力学分析与仿真。
它是在经典力学基础上产生的新学科分支,在经典刚体系统动力学上的基础上,经历了多刚体系统动力学和计算多体系统动力学两个发展阶段,目前已趋于成熟。
各种拓扑结构的特点
各种拓扑结构的特点
1. 总线拓扑结构呀,那特点就是简单直接呀!就好比一群人站成一排,一个人知道的消息可以顺着这一排直接传递下去。
咱就说在一个小办公室里,几台电脑用总线拓扑连接,是不是很方便呢?既节省成本又容易维护。
2. 星型拓扑结构可厉害咯!它就像一个中心老大带着一群小弟,所有信息都先汇聚到中心再分发出去。
学校的网络不就是这样嘛,所有电脑都连接到中心机房,出了问题也好排查呀,多牛啊!
3. 环型拓扑结构挺有意思的呢!就像一群人手拉手围成一个圈,信息在这个圈里循环传递。
你想啊,那种循环传输数据的感觉,多特别呀,虽然不太常用,但也有它独特的地方呀!
4. 树型拓扑结构,这不就是像一棵大树嘛!有主干还有很多分支,层次分明得很呐。
大型企业的网络很多就是这种呀,总部是主干,下面各个分支机构就是分支,多形象啊!
5. 网状拓扑结构哇,那可真是复杂又强大!就如同一张密密麻麻的大网,哪都能通。
一些关键的网络系统不就是用它嘛,虽然难搞一点,但是可靠性超强的呀!
6. 混合型拓扑结构,这就是各种结构的大杂烩呀!把不同的特点都结合起来,多机智呀!像一些综合的网络环境,就是用的混合型,充分发挥各种拓扑结构的优势,多棒啊!
7. 无线拓扑结构,现在多流行啊!不用那些线来连接,自由得很呢!就像手机无线连接网络一样,多方便快捷呀,随时随地都能用,这就是科技的魅力呀!
我觉得呀,各种拓扑结构都有它的用处和特点,我们得根据实际情况选择最适合的,这样才能让网络系统更好地为我们服务呀!。
多体机械系统的建模、控制与容错

多体机械系统的建模、控制与容错杨浩;张泽君;姜斌【摘要】M ultibody mechanical systems have been a difficult aspect in the control field in recent years . The paper firstly introduces the general structure and characteristics of multibody mechanical systems .Then ,frequently used modeling methods are analyzed andcompared .Advantages and drawbacks of these methods are given afterwards .Moreover ,the paper gives a detailed review of recent results on dif-ferent control schemes and fault-tolerant control methods applied to the multibody mechanical systems . Finally ,some perspectives are provided .%多体机械系统是近年来控制领域研究的难点.本文首先介绍了多体机械系统的结构和基本特性.其次,总结了近年来多体机械系统动力学常用的建模方法,分析了各种建模方案的优缺点.进一步介绍了近年来针对多体机械系统所采用的不同控制方法.最后,列举了容错控制在多体机械系统中的应用,并对多体机械系统控制未来的发展趋势进行了展望.【期刊名称】《南京航空航天大学学报》【年(卷),期】2017(049)005【总页数】10页(P612-621)【关键词】多体系统;建模理论;控制;容错控制【作者】杨浩;张泽君;姜斌【作者单位】南京航空航天大学自动化学院 ,南京 ,210016;南京航空航天大学自动化学院 ,南京 ,210016;南京航空航天大学自动化学院 ,南京 ,210016【正文语种】中文【中图分类】O313.7随着控制系统规模的日益增大和机器人技术的迅速发展,各类复杂机械系统大规模涌现,如车辆、各类航天器、机械臂、机器人及人体科学等。
什么是拓扑结构

什么是拓扑结构什么是拓扑结构? ⾸先我们来解释⼀下拓扑的含义,所谓“拓扑”就是把实体抽象成与其⼤⼩、形状⽆关的“点”,⽽把连接实体的线路抽象成“线”,进⽽以图的形式来表⽰这些点与线之间关系的⽅法,其⽬的在于研究这些点、线之间的相连关系。
表⽰点和线之间关系的图被称为拓扑结构图。
拓扑结构与⼏何结构属于两个不同的数学概念。
在⼏何结构中, 我们要考察的是点、线之间的位置关系,或者说⼏何结构强调的是点与线所构成的形状及⼤⼩。
如梯形、正⽅形、平⾏四边形及圆都属于不同的⼏何结构,但从拓扑结构的⾓度去看,由于点、线间的连接关系相同,从⽽具有相同的拓扑结构即环型结构。
也就是说,不同的⼏何结构可能具有相同的拓扑结构。
类似地,在计算机⽹络中,我们把计算机、终端、通信处理机等设备抽象成点,把连接这些设备的通信线路抽象成线,并将由这些点和线所构成的拓扑称为⽹络拓扑结构。
⽹络拓扑结构反映出⽹络的结构关系,它对于⽹络的性能、可靠性以及建设管理成本等都有着重要的影响,因此⽹络拓扑结构的设计在整个⽹络设计中占有⼗分重要的地位,在⽹络构建时,⽹络拓常见的⽹络拓扑结构 在计算机⽹络中常见的拓扑结构有总线型、星型、环型、树型和⽹状型等。
1.总线型拓扑 如图1.4所⽰,总线型拓扑中采⽤单根传输线路作为传输介质,所有站点通过专门的连接器连到这个公共信道上,这个公共的信道称为总线。
任何⼀个站点发送的数据都能通过总线传播,同时能被总线上的所有其他站点接收到。
可见,总线型结构的⽹络是⼀种⼴播⽹络。
扑结构往往是⾸先要考虑的因素之⼀。
在总线结构中,总线有⼀定的负载能⼒,因此,总线长度有⼀定限制,⼀条总线也只能连接⼀定数量的结点。
总线布局的特点是:结构简单灵活,⾮常便于扩充;可靠性⾼,⽹络响应速度快;设备量少、价格低、安装使⽤⽅便;共享资源能⼒强,极便于⼴播式⼯作即⼀个结点发送所有结点都可接收。
总线型拓扑是基本局域⽹拓扑形式之⼀。
在总线两端连接的器件称为端结器(末端阻抗匹配器、或终⽌器)。
计算机网络中的拓扑结构分析

计算机网络中的拓扑结构分析计算机网络的拓扑结构是指网络中各个网络节点之间的连接关系。
了解和分析网络的拓扑结构对于网络设计、性能分析以及故障排查等方面都起着重要的作用。
下面将详细介绍计算机网络中的拓扑结构分析,包括步骤和相关内容。
一、了解拓扑结构的定义与分类1. 定义:拓扑结构指的是计算机网络中各节点之间的物理连接方式。
不同的连接方式会直接影响网络的性能、安全性和可靠性等因素。
2. 分类:常见的拓扑结构有总线型、环形、星型、树形、网状等。
不同的拓扑结构适用于不同的场景和需求。
二、拓扑结构分析的步骤1. 收集网络拓扑信息:通过网络拓扑图、设备配置文件等方式,收集网络中各节点的连接关系。
2. 绘制网络拓扑图:将收集到的网络拓扑信息进行整理和绘制,以图形化的方式展示网络中各节点的连接关系。
3. 分析拓扑结构类型:根据网络拓扑图和定义,判断网络的拓扑结构类型,如总线型、环形等。
4. 评估拓扑结构优缺点:对于不同的拓扑结构类型,评估其在性能、扩展性、可靠性等方面的优缺点。
5. 预测网络性能:根据拓扑结构和设备信息,通过网络性能模拟工具预测网络的性能,包括带宽、时延等指标。
6. 识别潜在问题:根据拓扑结构的分析结果,识别潜在的问题,如单点故障、安全风险等,以便进一步改进网络设计。
7. 排查网络故障:当网络出现故障时,通过分析拓扑结构,找出故障点,加快故障排查和修复的过程。
三、常见拓扑结构的特点和适用场景分析1. 总线型:特点是所有节点使用同一个传输线,节点之间通过总线进行数据通信。
适用于小规模网络,成本较低,但当总线出现问题时,整个网络都会受到影响。
2. 环形:特点是节点按照环形连接,数据沿着环形线路传输。
适用于小型局域网,成本较低,但故障排查较困难。
3. 星型:特点是所有节点都与一个中央节点直接相连,数据传输通过中央节点进行转发。
适用于中小型局域网,易于扩展和管理,但中央节点出现问题时,整个网络都会瘫痪。
4. 树形:特点是将网络划分为多个较小的子网,然后通过路由器将各个子网连接起来。
拓扑结构
及它们的联系和区别。
充分理解总线型网络的数据流动形式,CSMA/CD的介质访问方式。
教学步骤:一、复习:网络类型、网络的构成[4分钟]网络类型和组成是本节课内容的重要铺垫,所以必须要先复习(教师讲解+师生互动(教师向学生提问网络的分类))主要内容:计算机网络分为广域网、城域网和局域网。
各网络的特征和范围和典型的实例局域网由工作站、服务器、共享的外围设备以及网络通信硬件和软件组成。
二、局域网的三种拓扑结构[3分钟](总体介绍三种拓扑结构,再分别讲解三种逻辑结构表示的意义)主要内容:对于一种网络形式,按照其物理连接方式、内部信号流动形式和设备使用的信道方式,可以分成三个方面:即物理拓扑结构、逻辑拓扑结构和介质访问方式。
物理拓扑结构是网络中站点的布置形式,逻辑拓扑是信号的流动形式,而介质访问方式是站点获取传输介质使用权的方式。
三、介绍网络拓扑结构的入门知识:介质连接类型[8分钟](总体介绍有两种连接方式,然后通过图示详细介绍两种各自的数据流动方式)主要内容:网络拓扑结构是指用传输媒体互联各种设备的物理布局。
也就是说这个网络“看起来”是一种什么形式。
物理拓扑不涉及网络中信号的实际流动,而仅关心介质的物理连接形态。
在网络中,各个设备之间必然都有介质的连接,这些连接可以分为两类:1)、点对点连接(Point-to-point Connection):指在两台设备间建立直接的连接,一条介质仅连接相应的两台设备而不涉及第三方。
它在凉台设备间独享信道的整个带宽,不存在冲突。
设备数量少时是一种简单、实用的通信方式,但是在设备增多时就变得复杂和困难了,并且由于不能共享带宽会造成浪费2)、多点连接(Multipoint Connection):在多点连接的方式中,多台设备共同使用一条传输介质,带宽共享,减少浪费。
四、介绍几种拓扑结构[3分钟](总体介绍一共有四种常见的有线网络拓扑结构,和一种无线网络拓扑结构,把它们分别归类到点对点连接和多点连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020年5月26日
多 体
本节内容
系
统
动 问题:如何描述多体系统中刚体的运动?
力
学
二 内容1:R-W方法 拓 内容2:多体系统的拓扑结构 扑 结 构 的 描 述
多 体
R-W方法
系
统 动 力 学
ω1 = ω0 + Ω1
ωω23
= =
ω0 ω0
+ +
Ω1 Ω1
+ +
Ω2 Ω3
二
ω4 = ω0 + Ω1 + Ω3 + Ω4
动 力
规律为已知的物体有铰联系,称该系统为有根系统。
学 与系统外运动规律为已知的物体无任何铰联系的系统
二 称为无根系统。
拓
扑
结
构
的
描 述
如果将描述无根系统运动的参考系记为B0,通过一个虚 铰与系统中某体相关联,则无根系统与有根系统在拓
扑结构上取得一致。
多 体
树系统和非树系统
系
统 任意两个物体之间路为唯一的多体系统称为树系统,
多 体
树系统的规则标号方法
系
统 动
限定只有一个铰与B0连接
力
学
二 拓 扑 结 构 的 描 述
多 体
树系统的规则标号方法
系
H
统 动
铰的方向一律背离零刚体B0
力 体的序号大于其内接体的序号
H Bi
i
j
Bj
学
体的序号与其内接铰序号相同
二
B3
H2 B2
拓
B4
扑
4
H4
Z3
H3
B2
B1 H1
B0
结 构
5 H5
拓
ω5 = ω0 + Ω1 + Ω3 + Ω5
扑 写成矩阵形式:
结 构
01n T T
1n @114,1,21,.4..31T
的
n个
描
如何写出矩阵T?
述
多 体
R-W方法
系
统
动 美国圣地亚哥大学的Roberson 和德国卡尔斯路大学的
力 学
Wittenburg 进行了合作。
二
他们首先在多刚体系统动力学的研究中引入了数学中 图论(Graph Theory)的有关概念,把千姿百态的具体
多 体
通路
系
统 动
如果由物体Bi,沿一系列物体和铰到达物体Bj,其中没有一
力 学
个铰被重复通过,则这组铰(或物体)构成物体Bi至Bj的路。
二
H
H
拓 H Bi
扑
i
j
H Bi
Bj
i
j
Bj
结 构
H2
B2
的
B1
描 H1
述
B0
H2 B2
B1 H1
B0
多 体
有根系统和无根系统
系
统 工程中大多数对象的多体系统力学模型与系统外运动
拓 扑 结 构 的 描 述
多 体
多体系统的拓扑构型
系
统 铰一般可以用一个或两个点表示其位置。
动
力
例:旋转副:一点。
学
滑移副:两点。
二
多体系统中各体的联系方式称 为系统的拓扑构型(拓扑)
拓 需要一个已知运动的物体作为
扑 结
基础(B0)。
构 铰定义为有方向的线段:
的
描述体间的相对运动
描 述
定义体间作用力的方向
拓 系统结构,用数学语言进行了成功的描述,给出的多 扑 刚体系统动力学一般公式的矩阵形式。
结
构
它山之石,可以攻玉
的
描
述
多 体
图论
系 统
图论是研究图的一门学科,由欧拉开始。
动 力
图是指由线(边、弧)连接的点(顶点)的集合,顶点
学 的位置分布和边的长短曲直都无关紧要,重要的是图的
联接结构。
二 哥尼斯堡七桥问题。
的 描 述
O2
0
T O3 0
O4
0
1 0
0
0
0 1 1 1
0
0
1
0
O4
B5
B2
O5 B3
O2 O3 B1
O5 0 0 0 0 1
O1
B0
多 体
通路矩阵
系
统 动 力 学
通路矩阵可以很方便用于描述
系统内部相对运动的关系。如
图,设 B0 运动已知,每个刚体 相对其前置刚体(内接刚体)
ω1 = ω0 + Ω1
动 力
反之称为带回路的系统,或者非树系统。
学
二 拓 扑 结 构 的 描 述 树系统
树系统
非树系统
多 体
树系统的内接和外接
系
统 沿着路的方向称为外接,反之为内接。
动
力 学
在体Bi的内(外)侧且与Bi相邻的体称为Bi的内(外)接体。
二 与体Bi相连且在Bi内侧的铰称为Bi的内接铰。
拓 扑 结 构 的 描 述
多 体
通路矩阵
系
统 动
T @(Tji )NHNB
第i列反映了Bi返回B0时要经过的铰。
力
学
二
1 Tji 1
H j在Bi B0的路上,且H j指向B0 H j在Bi B0的路上,且H j背向B0
拓
0
H j不在Bi B0的路上
B4
扑 结
B1 B2 B3 B4 B5
构
O1 1 1 1 1 1
0 0
0 0
0 1 0 0 0 1
H1 B0
多 体
关联矩阵
系
统 关联矩阵描述了系统的拓扑构型。
动
力
学
1 0 0 0 0
S0
二
1
1
1
0
0
拓 扑
0 1 0 0
S
0
0 1 1
0
1
S
结
0 0 0 1 0
构 的
0 0 0 0 1
描 述
对于规则标号法:S0的第一个元素为1,其它为0; S为上三角阵,且对角元素为-1。
ij
如果Bi与H
j
相关联,且Bi为H
的起点
j
如果Bi与H
j
相关联,且Bi为H
的终点
j
拓
0
如果Bi与H
不相关联
j
B4
扑
H1 H2 H3 H4 H5
结
B0 1 0 0 0 0
H4
B5
构 的 描 述
B1
1
1
1
0
S*
B2
0
1
0
0
B3 0 0 1 1
0
0
1
B2 H2
H5 B3 H3 B1
B4 B5
构
1
的 或写成矩阵形式为:
描 述 01n T T
1n @114,1,21,.4..31T
n个
该式是一个一般的公式,适用于任何系统。
多 体
关联矩阵和通路矩阵的特点
系
统
动 力
TS ST E
学
S0T [1, 1, 1,..., 1] 1nT
ωω23
= =
ω0 ω0
+ +
Ω1 Ω1
+ +
Ω2 Ω3
二 的转动角速度为Ωi,而每个刚
ω4 = ω0 + Ω1 + Ω3 + Ω4
拓 扑
体的绝对角速度为ωi,则有
ω5 = ω0 + Ω1 + Ω3 + Ω5
利用 Tji,可以把上式写成一个统一的公式
5
结
ωi ω0 Tji Ωj (i 1, 2,...5)
的 6
H2 2
B1
描 述
B5
H1 1
B0
Stanford机械手
多 体
关联数组
系
统 动
定义两个NH(Number of Hinge)阶一维整数数组:
力
学
i 0 1 1 3 3
B4
二
i 1 2 3 4 5拓源自铰:1 2 3 4 5扑 i+对应于铰的内接体
结 i-对应于铰的外接体
构
H4
B5
B2
H5 B3
H2 H3 B1
的 描
对于规则编号的系统仅需要i+即可
H1 B0
述 关联数组是描述系统拓扑的最简单形式,常用于程序的
输入。
多 体
关联矩阵
系
统 动 力
定义(NB+1)NH阶二维数组: 第i行反映了Bi与各铰的联结关系
NB=Number of Body
第j列反映了Hj与各刚体的联结关系
学
二
1 S* 1