TFDS图像自动识别系统框架设计与实现
TFDS安装构架图和原理说明

电源模块 Q61P :提供 PLC 组合单元电 源
02HCPU :存储用户程序,进行自动判 断客货车。 中断模块QI60:4路磁钢信号输入。
输入模块QX40:显示门到位信号
输出模块 QY40P :控制输出驱动中间 继电器等外界执行机构动作。
TFDS轨边机房设备
摄像头专用电源:DC12V
TFDS
货车故障轨边图像检测系统 (TFDS)简介
1、货车故障轨边图像检测系统(TFDS)是一套集 高速图像采集技术、大容量图像数据实时处理技术、 精确定位技术、图像自动识别技术和自动控制技术 于一体的智能化、网络化和信息化系统,能对货车 隐蔽和常见故障进行动态检测的TFDS系统。 2、系统通过布置于钢轨之间的高速像机列阵和AEI 设备,能精确捕捉通过列车的一系列相关信息,包 括过车信息、车辆位置信息、车辆轴距信息、车号 信息、图像信息。这些信息经数字化处理后显示于 监视器上,可以实现对整车车底和侧下部的检测和 进行故障自动识别。
门传动组件一套
成
箱体布线一套
TFDS轨边设备
TFDS-2侧箱
由 1个摄像头、8盏频闪灯(60°)、一套门传动控制方式及门信 号线、电机电源线、灯电源线、摄像头数据线组成。
抗阳光干扰摄像头
频闪灯
TFDS轨边设备
TFDS-2T侧箱
由 1个摄像头、8盏频闪灯(90°或60°)、一套门传动控制方式 及门信号线、电机电源线、灯电源线、摄像头数据线组成。
20011年起
1、采用线性摄像 头,分辨率为140 万像素; 2、光源为激光灯 3、控制方式采用 研华板卡组合
TFDS发展经历
TFDS系统重要指标性能
性能比较 摄像头型号 TFDS-1 1394A312F 30万像素 TFDS-2 HM1400TF (专用) 140万像素 TFDS-2T HM1400TF (专用) 140万像素 频闪灯、寿命 长、无干扰 TFDS-3 线性摄像头 140万像素
基于TFDS_智能检测技术的铁路货车技术交接平台研究*
Science and Technology &Innovation ┃科技与创新2023年第17期·45·文章编号:2095-6835(2023)17-0045-03基于TFDS 智能检测技术的铁路货车技术交接平台研究*周永华1,高善兵2,李玉东1,费向超3(1.中国铁路济南局集团有限公司济南西车辆段,山东济南250117;2.中国铁路济南局集团有限公司,山东济南250001;3.中国铁路济南局集团有限公司日照车辆段,山东日照276800)摘要:目前,对于厂矿企业专用线铁路货车的技术交接普遍采用室外人工检查方式,受人员素质、作业环境等因素影响易出现漏检问题,给铁路货车运行安全埋下隐患。
基于“科技保安全”工作理念,研究采用TFDS (Trouble of movingFreight car Detection System ,货车故障轨旁图像检测系统)[1]智能识别技术对专用线铁路交出货车进行技术交接检查作业,在TFDS 采集线阵图像基础上,综合利用深度学习和AI 图像处理技术,实时分析采集图像信息,利用智能识别技术交接车辆存在的故障并进行预警,把控专用线发出列车质量,保障铁路运输安全畅通。
关键词:TFDS ;技术交接;智能识别;智能检测中图分类号:U279.323文献标志码:ADOI :10.15913/ki.kjycx.2023.17.012目前,全路各技术交接作业场普遍采用室外人工检查作业方式,对车辆按照规定的检查范围和质量标准逐辆进行人工目视检查,确认车辆各部件技术状态是否符合运用要求。
由于受人员素质、技术水平、劳动强度、信息化程度等因素影响,车辆漏检、漏修问题时有出现;另外受夜间作业、恶劣天气等因素影响,加之无信息化手段进行预警,经技术交接作业后车辆质量难以保证;同时出现问题后,无车辆部件图像等有效手段进行问题追溯和责任界定。
借鉴列检作业场利用TFDS 设备进行人机分工作业的方式,以及利用智能识别技术进行TFDS 通过作业,在专用线与接轨站间安装TFDS 设备,同时利用智能识别技术进行技术交接作业,以此提高专用线技术交接作业质量,优化技术交接作业场人员,把住干线入口关。
TFDS货车运行故障动态图像检测系统介绍
TFDS系统推出背景
▪ 铁路作为国民经济的大动脉,肩负着重大的历史使命。部
党组为服务国民经济建设,站在历史的新高度,提出了实 现铁路跨越式发展的新思路。
▪ 面对铁路跨越式发展对车辆安全工作提出的新要求,铁路
安全技术创新规划应运而生,并且近期总体目标是:五年 内基本杜绝旅客列车重大事故,行车重大事故率比前五年 应有明显降低,铁路运输安全技术与安全技术装备水平显 著提高,安全管理手段显著完备,实现铁路运输安全“基 本稳定,有序可控”。
辨率为1400x1024,标配5台;
5. 抓拍最高速率:64fps; 6. 控制方式,使用车轮传感器,数量:4; 7. 服务器:采用IBM服务器两台,双机热备;
TFDS系统技术参数
8. 部件信息浏览终端:采用IBM计算机,10台; 9. 存储容量:故障信息存储两年,其它信息存储一个月; 10. 工作环境:室外:-40~70ºC,室内:-20~60ºC; 11. 探测站地线设置:系统设防雷地和设备地两点,防雷接
TFDS系统推出背景
▪ TFDS作为5T系统的重要组成部分,也是铁道部
经过多年筹划、反复论证,又经过长时间现场考 验的一项系统工程,目前我京天威公司TFDS全 路已有六十于套设备正式运用,在日常工作中发 挥着重要的作用。
▪ 后面为各位重点介绍我公司最新通过部评审的
TFDS高清抗阳光干扰型(TFDS HD Anti-sunlight)
▪ 探测站设备应设防雷保护设施,每处设防雷地和设备地两
点。对一般雷区采用避雷器和防雷地线的措施。防雷接地 电阻小于4欧姆,设备地小于10欧姆。
设备整体安装要求
▪ 探测站到列检监测中心之间采用光纤网络通讯,
8芯单模光纤(专用通道)光缆铺设深度大于0.8 米,细沙铺垫,立水泥标志桩,开机磁钢铠装电 缆铺设深度大于 0.8米。
货车运行故障动态图像检测系统
货车运行故障动态图像检测系统交通运输学院武中婧08121292摘要:本文介绍TFDS系统原理组成、功能及信息资源管理,概述系统给列检工作带来的转变和系统运用取得的成果。
文章还结合目前系统存在的问题得出系统运用的要求,并对完善系统能力、保障行车安全提出相应建议。
,关键词:图像、检测、系统、运用分析、TFDS系统、问题分析为了对运行中的列车进行实时检测,提高列检所故障发现率,实现机控代替人控的目的,将机器视觉技术运用到对影响列车行车安全关键部件动态检测上,成功应用了货车运行故障动态检测系统——TFDS 系统。
货车运行故障动态图像检测系统(TFDS)是货车安全防范系统的重要组成部分,它是通过对运行货物车辆进行高速摄像,并经计算机处理再由室内检车员判断,防止车辆运行故障的预警系统,现已在很多列检作业场进行了安装,其对提高运输效率、确保列车运行安全具有重要的意义。
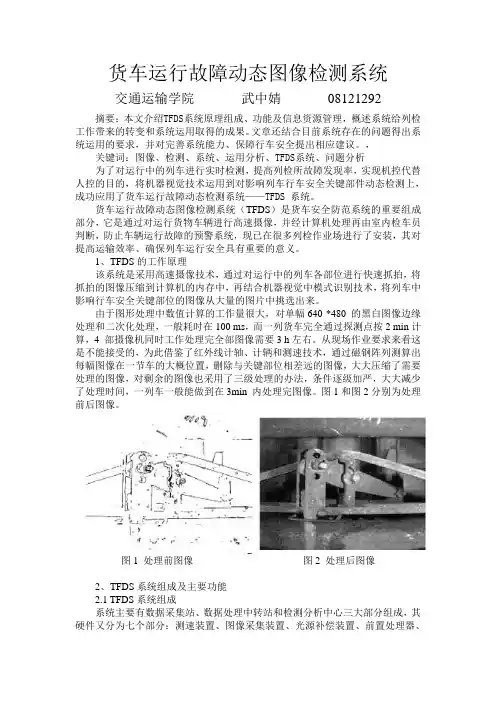
1、TFDS的工作原理该系统是采用高速摄像技术,通过对运行中的列车各部位进行快速抓拍,将抓拍的图像压缩到计算机的内存中,再结合机器视觉中模式识别技术,将列车中影响行车安全关键部位的图像从大量的图片中挑选出来。
由于图形处理中数值计算的工作量很大,对单幅640 *480 的黑白图像边缘处理和二次化处理,一般耗时在100 ms,而一列货车完全通过探测点按2 min计算,4 部摄像机同时工作处理完全部图像需要3 h左右。
从现场作业要求来看这是不能接受的,为此借鉴了红外线计轴、计辆和测速技术,通过磁钢阵列测算出每幅图像在一节车的大概位置,删除与关键部位相差远的图像,大大压缩了需要处理的图像,对剩余的图像也采用了三级处理的办法,条件逐级加严,大大减少了处理时间,一列车一般能做到在3min 内处理完图像。
图1和图2分别为处理前后图像。
图1 处理前图像图2 处理后图像2、TFDS系统组成及主要功能2.1 TFDS系统组成系统主要有数据采集站、数据处理中转站和检测分析中心三大部分组成,其硬件又分为七个部分:测速装置、图像采集装置、光源补偿装置、前置处理器、端口处理器、网络服务器和窗口计算机。
基于图像处理技术的货物识别系统设计与实现
基于图像处理技术的货物识别系统设计与实现摘要:随着物流行业的飞速发展,货物识别系统变得越来越重要。
本文旨在设计与实现一种基于图像处理技术的货物识别系统,该系统能够自动识别货物并提供准确的分类和识别结果。
通过采用深度学习算法,我们将介绍用于目标检测和识别的卷积神经网络(CNN),并通过数据预处理、模型训练和结果评估等步骤来实现货物识别系统。
1. 引言随着全球贸易的增加,物流行业得到了巨大的发展。
货物的高效识别和分类对物流系统的运行和管理至关重要。
而基于图像处理技术的货物识别系统能够准确、快速地识别和分类不同的货物,从而提高物流系统的效率和准确性。
2. 目标检测与识别算法2.1 卷积神经网络(CNN)卷积神经网络(CNN)是一种常用于图像处理和计算机视觉任务的深度学习算法。
它通过多层卷积和池化层来提取图像特征,并通过全连接层进行分类和识别。
在货物识别系统中,我们可以使用CNN作为目标检测和识别的算法。
2.2 数据准备与预处理在设计和实现货物识别系统之前,我们需要准备和处理一个有代表性的数据集。
首先,我们需要收集一系列包含不同种类和形状的货物的图像,并手动标注每个图像的类别。
然后,我们对图像进行预处理,如图像增强和大小调整,以提高模型的训练效果。
3. 模型训练与优化对于基于图像处理技术的货物识别系统,模型的训练和优化是非常重要的。
在训练过程中,我们会将数据集分为训练集和验证集,并利用训练集来训练模型的参数。
通过不断优化和调整模型的结构和参数,我们可以提高模型的准确性和泛化能力。
4. 结果评估与性能测试在设计和实现货物识别系统之后,我们需要对系统的性能进行评估和测试。
通过使用独立的测试集,我们可以计算模型在不同类别货物上的准确率、召回率和F1分数等评估指标,并对系统的整体性能进行评估。
5. 系统实现和应用基于图像处理技术的货物识别系统可以应用于物流行业中的自动化仓储和物流管理系统中。
该系统能够自动地识别和分类不同的货物,大大提高了物流系统的效率和准确性。
货车运行故障动态图像检测系统
货车运行故障动态图像检测系统(TFDS-1)使用说明书武汉华目信息技术有限责任公司目录一、系统简介 (1)二、系统组成 (2)三、系统原理 (10)四、系统主要特点及技术参数 (11)五、系统安装 (14)六、系统维护与保养 (19)七、常见故障分析与处理 (29)八、系统产品易损件 (31)九、技术服务与支持 (31)一、系统简介(一) TFDS-1系统的定义货车运行故障动态图像检测系统(TFDS系统)的定义是:应用计算机、网络通讯、自动控制、软件识别和图像采集处理技术并引进科学的管理方法和系统化的开发方法,为铁路货车运行故障检测提供故障图片信息动态收集、存储、传输及预警服务,提高列检作业质量和效率以及车辆安全防范的水平,加强货车运行中故障基础信息收集、管理的人机系统。
(二)TFDS-1系统的检测范围TFDS系统应提供清晰可辨的图像,供室内检车员对直通货物列车车辆的可检测部位进行外观检查,重点检测配件下部及外侧。
检测范围和质量标准如下:1.滚动轴承外圈前端、前盖、承载鞍前端无裂损,轴端螺栓无丢失,滑动轴承轴箱及配件齐全。
2.侧架及一体式构架侧梁外侧、摇枕底部无裂损,侧架立柱磨耗板无窜出、丢失,交叉支撑装置盖板下平面无变形、破损,交叉杆无裂损、弯曲、变形,交叉杆支撑座无破损,轴箱及摇枕弹簧无窜出、丢失,外簧无折断,转K4型转向架弹簧托板底部无破损、斜楔主摩擦板无丢失。
3.钩尾框底部无裂损,钩尾框托板无裂损、螺栓螺母无丢失,从板、从板座、缓冲器底部无破损,钩尾扁销螺栓、螺母、开口销无丢失。
4.闸瓦托吊、制动梁支柱、槽钢及弓形杆无弯曲、变形、裂损,制动梁吊的圆销、开口销、U形插销(螺栓)无丢失,闸瓦、闸瓦插销无折断、丢失,下拉杆无变形、折断、丢失,安全吊无折断、脱落、丢失,制动梁支柱、下拉杆、固定杠杆支点、移动杠杆、上拉杆的圆销、开口销无折断、丢失。
5.制动缸、副风缸无松脱,闸调器无破损,各拉杆无折断。
9.货车图像智能识别预警系统
…… ……
5、车辆图像智能识别预警系统结构
作业管理
车辆
图货像车 智图能像 识自 预别动 警 预系警统
系统
动态作业 系统权限设置
交接班管理 过车信息查询 检车作业监控 故障信息查询 故障信息确认
工作量统计 故障报警统计 自动识别故障统计 自动识别故障确认情况
系统总体设计 ➢ 系统整体采用B/S结构模式 本系统及全部子系统均采用B/S结构,开发框架平台提供了多层的分布式应用模型、组件重 用、一致化的安全模型以及灵活的事务控制。同时保证平台独立的、基于框架设计的解决 方案是相对独立的,不依附于某一个系统。 ➢ 系统的分层结构设计 软件架构采用分层设计,对各层封装自己的实现逻辑,并向上一层提供接口。每层都只和 相邻的层互相通讯,不允许跨层调用。通过分层设计使系统具有高性能、高安全性、高可 可靠性、可扩展性以及方便维护等优点。
TrainEyes车辆图像智能识别预警系统
产品介绍
北京佳讯飞鸿电气股份有限公司 2018年
1、研发背景
铁路TFDS/TVDS/TEDS系统痛点
● 占用大量列检人员
每套TFDS/TVDS/TEDS占用大量人员,平均占用12个人 员。以大秦线为例,全线有160名列检人员目检作业
● 工作强度、工作量很大
8、智能识别技术实现流程
2、对货车所有零部件进行编码 并人工筛选训练样本,覆盖整车 近400个主要部件。(如货车图例)
9、案例分析
以湖东站(接入1台TF数据)为例:
➢ 每天有96列货车图片数据需要检测; ➢ 每天共产生100万张左右的列检部位图; ➢ 最长的运煤专列有210辆车,产生10500张列检部位图; ➢ 每列车的故障检测时间只有15分钟; ➢ 保证每天24小时不间断工作。
《2024年基于OpenCV的人脸识别系统设计》范文
《基于OpenCV的人脸识别系统设计》篇一一、引言随着科技的快速发展,人脸识别技术已经成为现代计算机视觉领域的一个重要研究方向。
人脸识别系统能够自动识别和验证人的身份,广泛应用于安全监控、门禁系统、支付验证等众多领域。
本文将详细介绍基于OpenCV的人脸识别系统的设计。
二、系统需求分析1. 功能需求:人脸检测、人脸特征提取、人脸识别比对等。
2. 性能需求:高识别率、实时响应、系统稳定。
3. 环境需求:操作系统兼容性强,设备要求合理。
三、系统设计概述基于OpenCV的人脸识别系统主要包括预处理、特征提取和匹配三个部分。
通过图像处理和机器学习技术,实现人脸检测和识别的功能。
四、系统架构设计1. 数据预处理模块:主要完成图像的输入、格式转换、尺寸调整等操作,以满足后续处理的需球。
同时对图像进行去噪和锐化处理,提高识别的准确性。
2. 人脸检测模块:利用OpenCV中的人脸检测算法(如Haar 级联分类器或深度学习模型)进行人脸检测,确定图像中的人脸位置。
3. 特征提取模块:通过OpenCV的深度学习模型(如OpenCV DNN模块中的卷积神经网络)提取人脸特征,如面部关键点信息等。
4. 人脸比对模块:将提取的特征与数据库中已有人脸特征进行比对,找出相似度最高的匹配结果。
根据设定的阈值,判断是否为同一人。
五、关键技术实现1. 人脸检测算法:采用OpenCV中的人脸检测算法,如Haar 级联分类器或深度学习模型,实现对图像中人脸的快速定位。
2. 特征提取算法:利用OpenCV的深度学习模型(如OpenCV DNN模块中的卷积神经网络)进行特征提取,包括面部关键点信息等。
3. 人脸比对算法:采用相似度算法(如欧氏距离、余弦相似度等)进行人脸比对,找出相似度最高的匹配结果。
六、系统实现与测试1. 系统实现:根据设计架构,逐步实现各模块功能。
采用C++编程语言,利用OpenCV库进行开发。
2. 系统测试:对系统进行严格的测试,包括功能性测试、性能测试和稳定性测试等。
货车运行故障动态图像检测系统(TFDS)
货车运行故障动态图像检测系统(TFDS)简介及存在问题郑州北车辆段远鹏摘要:伴随着铁路运输的不断发展、第六次提速,新的运输生产秩序要求列检所保证区段不断延长,传统列检作业方式越来越难适应新形势发展的需要。
作为“5T”系统之一,货车运行故障动态检测系统(Trouble of moving freight car detection system ,简称TFDS)即为目前在列检所采用的先进的检测装备。
本文简单介绍了TFDS系统的设备情况,并提出了使用中存在的一些问题,以供探讨。
关键词:车辆 TFDS 简介问题1设备简介1.1系统原理TFDS系统采用了当今的一些新技术:高速摄像、大容量图像数据实时处理、模式识别、计算机及网络等技术。
系统通过布置于钢轨之间的高速相机阵列,拍摄通过列车车辆的转向架、基础制动装置、车钩缓冲装置等车辆关键部位的图像,经计算机处理后传输到室内分析室。
室内检车员对抓拍到的图像进行分析、判别有关故障,从而达到动态检测车辆主要技术状态的目的。
1.2系统功能TFDS系统具备图像化监控运行列车关键部位的能力,具备以下功能:(1)自动拍摄和筛选出车辆转向架、基础制动装置、车钩缓冲、交叉杆底部等部位的图像,实现对车底和侧下部的检测。
(2)通过人机结合的方式对车辆图像信息和过车信息进行分析,判别故障。
(3)室内分析室按一车一档的方式建立并显示图像。
(4)自动对通过列车进行计轴、计辆和测速。
(5)自动识别列车车次、车号信息,判别货车车种车型。
(6)自动生成列检所常用统计报表。
(7)能够实现分散检测、全程追踪、全线联网、信息共享的要求。
1.3系统组成TFDS系统主要由检测信息采集设备、信息处理传输设备、列检所检测中心和其他复示终端构成。
检测信息采集设备即轨边探测设备,主要有高速摄像装置、光源补偿装置、车轮传感器、AEI地面天线等组成,主要完成过车检测、光源补偿、图像采集任务。
信息处理传输设备即探测站机房内设备,主要有图像信息采集设备、车辆信息采集设备、交换机、光纤收发器等组成,主要负责对过车信息处理并控制室外设备的正常工作,将采集到的图片进行处理,并将处理后的图像数据传输到列检所检测中心。
TFDS系统介绍(济南)ppt课件
5. 抓拍最高速率:64fps; 6. 控制方式,使用车轮传感器,数量:4; 7. 服务器:采用IBM服务器两台,双机热备;
16
TFDS系统技术参数
www.
8. 部件信息浏览终端:采用IBM计算机,10台; 9. 存储容量:故障信息存储两年,其它信息存储一个月; 10. 工作环境:室外:-40~70ºC,室内:-20~60ºC; 11. 探测站地线设置:系统设防雷地和设备地两点,防雷接
www.
探测站到列检监测中心之间采用光纤网络通讯,
8芯单模光纤(专用通道)光缆铺设深度大于0.8 米,细沙铺垫,立水泥标志桩,开机磁钢铠装电 缆铺设深度大于 0.8米。
列检检测中心机房使用面积需大于40平方米,有
良好的通风、取暖设施,保证室内温度:10℃~ 30℃,相对湿度:<95%,房间需装修(防静电 地板),安装空调,10套桌椅(相应的网络接口、 电源接口应铺设到位)。
新标准设备外观图
www.
侧箱实拍照片
工业摄 像机
LED频闪 灯
15
TFDS系统技术参数
www.
系统硬件技术参数:
1. 适应列车速度:5~120Km/h; 2. 保护门开启、关闭反应时间:≤1.5S; 3. 补偿光源开启关闭相应时间:≤1S; 4. 摄像机:加拿大DALSA Genie HM1400千兆网络摄像头,分
6
TFDS系统作用
www.
1. 实现人机联控,提高故障判别的可靠性; 2. 替代人工室外检查作业,减轻检车员的劳动强
度,提高列检作业质量;
3. 提高运输效率,为确保运输安全高效创造了条
件;
4. 实现分散检测、集中报警; 5. 实现网络监测、信息共享。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TFDS图像自动识别系统框架设计与实现
摘要:本文设计了一种新的货车故障轨边图像检测系统(简称tfds)图像自动识别系统的框架结构,首先将待检测部件的故障情况进行分类,建立标准样本图库。
在此基础上采用图像处理和识别算法对车辆故障进行自动检测和识别,系统核心功能模块可分为两个部分:部件检测定位模块和故障识别模块。
试用结果表明,采用该框架结构的tfds图像自动识别系统具有较高的识别准确率。
关键词:车辆运用;tfds;自动识别;特征融合
1 引言
tfds的投入应用,改变了列检作业方式,提高了铁路货车安全防范系数,减轻了现场检车员的劳动强度。
但该系统在运用过程中仍然受职工技术业务水平、人员劳动组织等问题局限,影响了该系统在运用工作中的作用的发挥。
因此,分析查找问题产生原因,并采取相应的措施加以改进显得十分重要。
现有的tfds系统主要采用人工判读的检测方式,存在如下问题:
1.1 作业强度大,长时间的看图作业会降低检测的准确性,造成常见、重点故障的漏检。
1.2 对人员的水平要求高,每辆车都有大量的待检测故障点,不同类型车辆的检测位置也各不相同,室内检车员必须对车辆基础知识掌握全面,人员培训和维护成本较高。
1.3 检测各个环节都是人为操控,检测周期长,耗费大量人力,效率低。
为解决这些问题,我们设计了tfds图像自动识别系统的框架结构,并在此基础上实现了一套基于tfds图像的自动识别系统。
系统通过对拍摄图像信息进行检测和分析,给出货车车辆的检测结果报告。
通过对图像的处理,检测出车辆的关键部件是否有异常情况,并可以自动完成异常图像的自动位置定位和异常类型的归类。
2 tfds图像自动识别系统框架
2.1 系统总体框架
在tfds图像自动识别系统的框架设计前期,经过对各种类型车辆检测的相关调研,我们首先将待检测部件的故障情况进行分类,建立标准样本图库。
在此基础上采用图像处理和识别算法对车辆故障进行自动检测和识别,系统核心功能模块可分为两个部分:部件检测定位模块和故障识别模块。
部件检测定位模块的作用是在图像中自动检测并定位到需要进
行故障识别的各个部件,部件检测定位算法能够自动告诉识别系统某个待查部件在tfds图像中的具体位置,这个步骤的性能直接影响到故障识别的精度。
故障识别模块的作用就是从检测定位到的图像中识别出该部件
是否出现故障、出现了什么故障,最后进行汇总、汇报给tfds系统哪些部件出现了何种故障。
为保证整个系统的可靠性,系统采用了三种不同的识别算法来对部件故障进行分析,最后的识别结果由三种算法的结果投票得出,因此系统的故障识别模块中又包含三个子模块,每个子模块对应一个不同的具体的识别算法,tfds图像的
自动识别过程就是利用三种不同的算法进行识别是否出现故障,只有当两个以上的算法认为出现故障时,系统才认为某个部件出现某种故障,这样各个算法间就可以相互合作从而实现更好的识别效果,保证了整提算法的可靠性。
2.2 自动识别系统模块算法
2.2.1 部件检测定位算法
部件检测定位算法需要首先训练一个用于部件定位的分类器,部件检测定位算法的整体流程如图1所示。
经过对各种类型车辆检测的相关调研,我们首先将待检测部件的故障情况进行分类,建立标准样本图库,在分类器的训练过程中,样本图库中的正样本和反样本在经过预处理和特征提取后,经过训练形成该部件的分类器,在后续的检测定位过程中,待检测部位图像经过同样的预处理和特征提取算法后,由先前训练好的分类器进行分类,最后依据分类结果确定图像的某一部位是否存在部件。
对于一副tfds图像,固定一个扫描窗口,将整幅tfds图像扫描一遍后,依据每一个扫描窗口的分类结果,便可实现对部件的精确定位。
2.2.2 故障自动识别模块
如前所述,为了保证整个系统的可靠性,系统采用了三种不同的识别算法来对部件故障进行分析,最后的识别结果由三种算法的结果投票得出,所采用的三种具体识别算法介绍如下:
◆全局与局部特征融合
tfds图像自动识别系统中的故障自动识别子模块1主要是将全局
的fft特征和局部的gabor特征进行融合,分别从局部和全局去描述部件特征,从而更全面地从特征层面上去描述一个部件。
识别框架如图2所述:
算法的主要流程即首先要对图片进行gabor和fft变换,再经过pca和lda降维优化,通过svm模型各自得到一个分数进行分数级融合,最后通过阈值判断,并给出模块1对该部件的识别结论。
◆ gbdt和随机森林的融合
gabor和fft都是从频域上去描述部件,而部件图像的灰度信息中也存在着大量的可用信息,并且这些信息的稳定性和可靠性也很高,比如像素点差分特征。
像素点差分特征属于离散特征,适合用决策树进行分类识别。
tfds图像自动识别系统中的故障自动识别子模块2的识别框架如图3所示:
算法的主要流程即将部件图像的像素点差分特征分别送入gbdt 和随机森林模型,然后再对gbdt和随机森林模型的输出结果进行决策级的融合,最终给出自动识别模块2对该部件的识别结论。
◆局部gabor变化直方图和相关性特征挑选
gabor特征在自动识别模块1中做为局部特征来对部件图像进行描述,使用gabor滤波后的幅值直接作为特征描述,其中虽然包含了很多部件的细节信息,但是同时也存在很多无用的冗余信息,为了弥补这个缺点,我们在系统的自动识别子模块3中使用局部gabor 二值模式直方图对gabor特征进行编码压缩,在去除gabor特征冗余的同时,可结合局部二值模式特征lbp的对光照的鲁棒性,并且
使用直方图表示对特征进行维度压缩,进一步增强算法的稳定性。
tfds图像自动识别系统中的故障自动识别子模块3 的识别框架如图4所示:
3 系统检测效果
下面以现场常见的挡键丢失类故障为例,给出所设计的系统在试用现场的检测效果。
挡键丢失故障是经常出现的故障,工人在检测是需要手动在图片上标记红框同时需要判别该转向架型号,然后提交上报,整个时间大概需要10秒。
自动识别可以用1秒识别出故障并标注。
如图5所示,对于挡键没有丢失的图片,所设计的系统能够准确通过绿色提示框给现场工人提示,减少重复查看,而对于挡键丢失的故障,系统会准确地通过红色警示框提醒现场工人。
4 结束语
针对tfds图像自动识别系统的算法改进,有助于提高整个自动识别系统的识别准确率和实用性。
为此本文设计了一种新的tfds 图像自动识别系统的框架结构,其中广泛采用了特征融合和决策融合的思想。
试用结果表明,采用该框架结构的tfds图像自动识别系统具有较高的识别准确率和实用性。