机器人焊接操作教程
焊接机器人示教

7.3 焊接机器人的作业示教
点焊作业示教 程序点 程序点 1 (机器人原点) 程序点 2 示教方法 ① 按第 3 章手动操纵机器人要领移动机器人到原点。 ② 将程序点属性设定为“空走点”,插补方式选“ PTP ”。 ③ 确认保存程序点 1 为机器人原点。 ① 手动操纵机器人移动到作业临近点,调整焊钳姿态。 ② 将程序点属性设定为“空走点”,插补方式选“ PTP ”。
工业机器人技术及应用
— 焊接机器人及其操作应用
主 编:兰 虎
7.3 焊接机器人的作业示教
7.3.1 点焊作业 点焊是最广为人知的电阻焊接工艺,通常用于板材焊接。焊接限于一 个或几个点上,将工件互相重叠。 TCP 点确定: 对点焊机器人而言,其一般设在焊钳开口的中点处,且要求焊钳两电 极垂直于被焊工件表面。
③ 确认保存程序点 1 为圆弧 / 焊接接近点。 ① 将机器人移动到圆弧轨迹开始点。 ② 将程序点属性设定为“焊接点”,插补方式选“圆弧插补”。 ③ 确认保存程序点 2 为圆弧 / 焊接开始点。 ① 将机器人移动到圆弧轨迹中间点。 ② 将程序点属性设定为“焊接点”,插补方式选“圆弧插补”。 ③ 确认保存程序点 3 为圆弧 / 焊接中间点。 ① 将机器人移动到圆弧轨迹结束点。 ② 将程序点属性设定为“空走点”,插补方式选“圆弧插补”。 ③ 确认保存程序点 4 为直线轨迹结束点。
自动直线 移到开始点
程序点 程序点 1 (圆弧 / 焊接接近点 ) 程序点 2 (圆弧 / 焊接开始点 ) 程序点 3 (圆弧 / 焊接中间点 ) 程序点 4 (圆弧 / 焊接结束点 )
示教方法
① 将机器人移动到圆弧轨迹接近点。 ② 将程序点属性设定为“空走点”,插补方式选“ PTP” 或“直线插补”
—— —— 焊空 接走 点点
焊接机器人操作规程

焊接机器人操作规程
1、旋开气体阀门;新瓶要放半分钟,防止有存水。
2、进入机器人系统操作界面后,打开焊机电源;
3、将控制柜上主开关旋至"ON"位置,控制器开启。
4、对夹具的气路进行检查是否存在漏气等现象。
5、要生产的产件的焊接夹具放到工作台上,连接气动线和控制线
6、在示教器上检查通气键与送丝键,检查焊枪是否通气和送丝;
7、装上被加工件,注意安装时是否正确安装,后启动开始按钮
开始焊接
8、对首三件按照操作指导书进行自检填写生产件质量记录卡、工装/夹具设备运行卡。
9、焊接后对产件进行工人自检,包括表面质量,装配尺寸,同轴度等是否合格。
10、在焊接过程中出现质量波动,由焊接工艺员对程序进行修改,
其它人员不得更改,防止出现质量事故。
11、每班结束后进行末件自检,每箱产件填写随批卡,装箱入库。
12、关闭焊机、控制柜、等所有电源;
13、正常运行1.5个月需要对工作站进行500小时检查
14、喷嘴正常使用无焊渣、飞溅等杂物连续使用每100小时更换一次
15、导电嘴正常使用每20小时更换一次
16、示教器要摆放到指定位置,电缆线不得缠绕,显示面避免划伤
17、送丝导管必须及时清理避免断弧。
18、对作业区的杂物进行清理。
19、机器人各关节在维修后需要注油。
20、夹具在夹紧过程中工人的手远离夹具防止夹手。
21、机器人在运行过程中避免进入机器人工作范围内防止碰伤。
(完整版)焊接机器人示教

7.3 焊接机器人的作业示教
点焊作业示教
程序点
示教方法
① 按第 3 章手动操纵机器人要领移动机器人到原点。
程序点 1 直线轨迹开始点
程序点 4 直线轨迹结束点
程序点 2 焊接开始点
程序点 3 焊接结束点
————
焊接区间
焊空 接走 点点
直线轨迹区间
直线运动轨迹
7.3 焊接机器人的作业示教 直线程轨序迹点开1始点 焊程接序开点始2点
直线程轨序迹点结4束点 焊程接序结点束3点
焊接区间 直线轨迹区间
———— 焊空 接走 点点
一般设置在焊枪尖头,而激光焊接机器人 TCP 设置在激光 焦点上 。
弧焊机器人工具中心点
7.3 焊接机器人的作业示教
TCP 点确定: 实际作业时,需根据作业位置和板厚调整焊枪角度。
以平(角)焊为例,主要采用前倾角焊(前进焊)和后倾 角焊(后退焊)两种方式。
a ) 前倾角焊
b ) 后倾角焊
前倾角焊和后倾角焊
程序点 3 (焊接结束点)
① 将机器人移动到焊接结束点。 ② 将程序点属性设定为“空走点”,插补方式选“直线插补”。 ③ 确认保存程序点 3 为焊接结束点。
程序点 4 (直线轨迹结束
点)
① 将机器人移动到直线轨迹结束点。 ② 程序点属性设定为“空走点”,插补方式选“直线插补”。 ③ 确认保存程序点 4 为直线轨迹结束点。
登录程序点 5
登录程序点 3
登录程序点 4
ABB机器人 机器人焊接 圆弧弧焊指令 示教要点 PPT 机器人编程 机器人焊接 精品课件

焊接准备 焊接过程 焊接并结束
P20 P10
图1 理想轨迹
P20
P30 误差轨迹
P10 图2
理想点
P30 误差点
应用讲解
P1
P2
P4 P3
P6 P5
焊接轨迹
空走轨迹
MoveJ p1…… MoveL p2…… ArcCStart p3, p4, v100, seam1, weld1, fine, tool1; ArcLEnd p5, v100, seam1, weld1, fine, tool1; MoveL p6……
焊接准备 焊接并结束
应用讲解
P1
P2
P4 P3ຫໍສະໝຸດ P6 P5焊接轨迹
空走轨迹
MoveJ p1…… ArcLStart p2, v100, seam1, weld1, fine, tool1; ArcC p3, p4, v100, seam1, weld1, fine, tool1; ArcLEnd p5, v100, seam1, weld1, fine, tool1; MoveL p6……
焊接准备 焊接并结束
应用讲解
P1
P2
P4 P5
P3
焊接轨迹
空走轨迹
MoveJ p1…… ArcLStart p2, v1000, seam1, weld1, fine, tool1; ArcCEnd p3, p4, v1000, seam1, weld1, fine, tool1; MoveL p5……
弧焊指令
系统速度
焊接数据
工具数据
示教点位
起收弧数据
转弯区数据
应用讲解 P0
P1 P2
P3 焊接轨迹
自动焊接机器人怎么调试与操作教程【完整版】
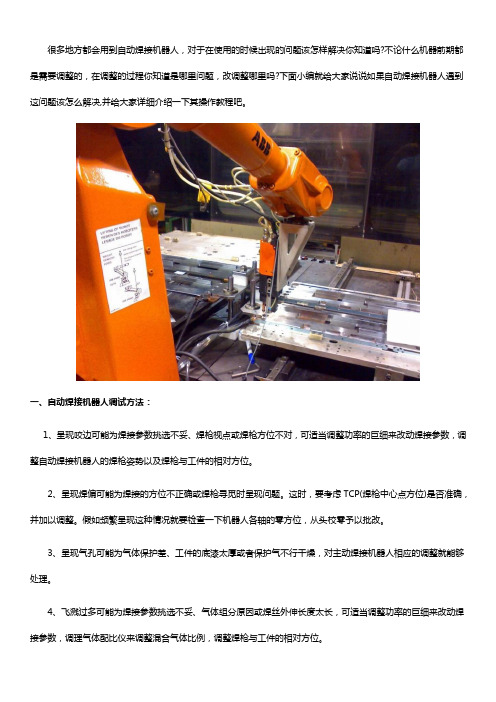
很多地方都会用到自动焊接机器人,对于在使用的时候出现的问题该怎样解决你知道吗?不论什么机器前期都是需要调整的,在调整的过程你知道是哪里问题,改调整哪里吗?下面小编就给大家说说如果自动焊接机器人遇到这问题该怎么解决,并给大家详细介绍一下其操作教程吧。
一、自动焊接机器人调试方法:1、呈现咬边可能为焊接参数挑选不妥、焊枪视点或焊枪方位不对,可适当调整功率的巨细来改动焊接参数,调整自动焊接机器人的焊枪姿势以及焊枪与工件的相对方位。
2、呈现焊偏可能为焊接的方位不正确或焊枪寻觅时呈现问题。
这时,要考虑TCP(焊枪中心点方位)是否准确,并加以调整。
假如频繁呈现这种情况就要检查一下机器人各轴的零方位,从头校零予以批改。
3、呈现气孔可能为气体保护差、工件的底漆太厚或者保护气不行干燥,对主动焊接机器人相应的调整就能够处理。
4、飞溅过多可能为焊接参数挑选不妥、气体组分原因或焊丝外伸长度太长,可适当调整功率的巨细来改动焊接参数,调理气体配比仪来调整混合气体比例,调整焊枪与工件的相对方位。
5、焊缝结尾处冷却后构成一弧坑,编程时在作业步中增加埋弧坑功用,能够将其填满。
二、自动焊接机器人操作教程:自动焊接机器人该如何操作?企业引进焊接机器人可以帮助提高生产效率,和企业生产线进行同步运行,提高产品的合格率,可以加快实现转型升级。
能够让自动焊接机器人在保证生产效率的基础上稳定质量,就需要一个合格的操作人员来进行操作,针对新手,小编带您总结新手应该怎么更快的上手操作自动焊接机器人。
首先,我们需要了解焊接机器人的运动特性和结构。
焊接机器人的运动特性也就是了解焊接机器人的运动轨迹,在正常的工作下,了解好运动路径,有利于正确的编写焊接参数,结构主要包括控制机构、执行机构和机器人本体。
控制机构就和人的大脑一样,控制整个机器人的运行,执行机构负责对下达的指令进行操作,机器人本体就是焊接机器人的框架部分。
其次,在启动焊接机器人之前需要进行离线编程工作。
2024kuka机器人焊接编程入门教程

入门教程•KUKA机器人简介•焊接基础知识•KUKA机器人焊接系统组成•KUKA机器人焊接编程基础目录•焊接工艺参数设置与调整•实际操作演练与问题解答•总结与展望KUKA机器人简介KUKA机器人发展历程早期发展KUKA机器人公司成立于1898年,早期主要从事于焊接设备和其他自动化设备的制造。
技术创新随着计算机技术和传感器技术的发展,KUKA机器人逐渐实现了数字化、智能化和网络化,成为全球领先的工业机器人制造商之一。
拓展应用领域KUKA机器人不断拓展应用领域,从最初的汽车制造领域逐步扩展到航空航天、电子、物流等多个领域。
KUKA 机器人应用领域01020304汽车制造航空航天电子产品物流领域高精度高速度高可靠性强大的编程能力KUKA机器人技术特点焊接基础知识焊接原理及分类焊接原理焊接分类常见焊接方法与特点熔化焊压力焊钎焊焊缝表面应平整、均匀,无裂纹、气孔、夹渣等缺陷。
外观质量内在质量无损检测破坏性检测焊缝内部应无裂纹、未熔合、未焊透等缺陷,且强度、韧性等力学性能应符合要求。
通过射线探伤、超声波探伤等无损检测方法对焊缝进行检测,以确保其内部质量。
通过拉伸、弯曲、冲击等破坏性试验对焊缝进行检测,以评估其力学性能和可靠性。
焊接质量评价标准KUKA机器人焊接系统组成机器人本体及控制器机器人本体控制器KUKA机器人控制器采用先进的计算机技术和运动控制技术,实现对机器人本体的精准控制,保证焊接质量和效率。
焊接电源及送丝机构焊接电源送丝机构传感器与检测装置传感器检测装置辅助设备及安全防护辅助设备KUKA机器人焊接系统还包括一些辅助设备,如焊接工装、变位机等,用于提高焊接效率和降低劳动强度。
安全防护为保障操作人员的安全和设备的正常运行,KUKA机器人焊接系统采取多重安全防护措施,如安全围栏、急停按钮、碰撞检测等。
KUKA机器人焊接编程基础编程语言及编程方式KRL编程语言编程方式离线编程软件介绍KUKA SimKUKA Sim是一款强大的离线编程软件,它可以在计算机上模拟机器人的运动轨迹和焊接过程,帮助程序员提前发现并解决潜在的问题。
工业机器人伺服点焊指导教程
工业机器人伺服点焊指导教程
一.机器人伺服焊枪初始设定
5.按完成进入下一个设定,按ENTER键
选择【是】
选择【是】
进入以下画面,执行箭头所指的1,2步
执行上面步骤前焊钳间放一张纸,用来焊钳零点标定,如下图所示:
X钳参数表
把X钳参数填好,然后按F3完成。
如下图:
C钳参数表
把C钳参数填好,然后按F3完成。
如下图:
进入第9项压力调整
填写5,6,7项参数后按完成
二.点焊机器人指令
2.点焊指令示教。
3.焊接条件
压力
距离
4.焊接IO
5.研磨指令
电极头修磨设定:
三.点焊机器人程序讲解
1.工件点焊位置如下:
2.机器人主程序:
3.电极头修磨子程序:
四.小原点焊机参数设定
1. 焊接条件设定步骤
焊接条件是指HEAT1(电流值),WELD1(焊接时间),SQUEZ(加压时间)等数据。
连接好编程器后按下列步骤操作:
1)
键2次使
灯亮。
2)键,进入初始状态。
3)键,选择控制箱数据设定。
(例:1)按enter
4)
* 按
* 按上下(
*
*
1
3. 基本焊接条件设定参考值
4. 焊接参数设定步骤
焊接参数设定是指是否开通补焊功能、是否开通步增功能等。
连接好编程器后按下列步骤操作:
1)键2次使灯亮。
2)键,进入初始状态
3)
4)
5)
* 按上下(
*
*
页。
OTC焊接机器人基本操作说明

06
安全操作注意事项
安全防护装置使用说明
防护门和光栅
在操作机器人时,确保防护门关 闭且光栅无遮挡。这些装置旨在
防止人员进入危险区域。
安全警示标识
遵循所有贴在机器人或其周边设备 上的安全警示标识。这些标识提供 了关于潜在危险和如何避免它们的 重要信息。
急停按钮
熟悉急停按钮的位置,以便在紧急 情况下迅速按下,停止机器人的所 有运动。
如果发生任何紧急情况, 如人员受伤或设备故障, 立即按下急停按钮以停止 机器人。
撤离危险区域
在按下急停按钮后,迅速 撤离危险区域,并确保其 他人员也这样做。
报告事故
立即向上级或安全部门报 告事故,并提供详细的事 故描述和任何可用的证据。
THANK YOU
OTC焊接机器人采用专用的编程 语言,具有直观易懂的语法结构,
方便用户进行编程操作。
编程语言支持多种指令,包括运 动控制、IO控制、焊接参数设置
等,可实现复杂的焊接任务。
指令具有丰富的功能和灵活的配 置选项,用户可根据实际需求进
行个性化设置。
程序编写方法与技巧
程序编写前需充分了解焊接工艺要求 和机器人性能参数,确保程序的正确 性和可行性。
序的稳定性和可靠性。
利用仿真软件对程序进行模拟 运行,检查机器人的运动轨迹
和焊接参数是否符合要求。
在实际环境中进行试运行,观 察机器人的实际表现,及时调
整程序中的不合理之处。
对于复杂的焊接任务,可采用 分步调试的方法,逐步验证每 个步骤的正确性,提高调试效
率。
05
机器人维护与保养
日常维护内容及方法
急停按钮
02
在紧急情况下切断机器人电源,确保安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人焊接操作规程
内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!
更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,用于工业自动化领域。
为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
点焊机器人的焊接装备,由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以变压器必须尽量小型化。
对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。
变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接。
焊接参数由定时器调节,参见图1b。
新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。
点焊机器人的焊钳,通常用气动的焊钳,气动焊钳两个电极之间的开口度一般只有两级冲程。
而且电极压力一旦调定后是不能随意变化的。
近年来出现一种新的电伺服点焊钳,如图4所示。
焊钳的张开和闭合由伺服电机驱动,码盘反馈,使这种焊钳的张开度可以根据实际需要任意选定并预置。
而且电极间的压紧力也可以无级调节。
这种新的电伺服点焊钳具有如下优点:
1)每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机器人精确控制的,机器人在点与点之间的移动过程、焊钳就可以开始闭合;而焊完一点后,焊钳一边张开,机器人就可以一边位移,不必等机器人到位后焊钳才闭合或焊钳完全张开后机器人再移动;
2)焊钳张开度可以根据工件的情况任意调整,只要不发生碰撞或干涉尽可能减少张开度,以节省焊钳开度,以节省焊钳开合所占的时间。
3)焊钳闭合加压时,不仅压力大小可以调节,而且在闭合时两电极是轻轻闭合,减少撞击变形和噪声。
以前在电视里经常会看到机器人,拥有超高的智慧,令人非常向往。
随着人类科技的进步,这种经常出现在科幻片中的机器人已经来到现实中,并且已经被应用于工业的发展,为社会经济的发展做出贡献。
今天介绍的是机器人焊接操作教程,一起来了解一下。
机器人焊接操作教程非常复杂,下面就简单介绍一下:
一、上工准备
仔细检查机器人操作盘、示教器、系统主操作盒、副操作盒“紧急停止”打开,然后副操作盒处“运转准备”启动,打开外部轴伺服及读取外部轴位置数据;系统运转准备好,自动状态,触摸屏显示自动焊接画面;
二、参数设置
首先输入密码进入参数设定画面。
设定机器人程序对应回转形式,工位1,2设定数值1至10,分别对应机器人焊接程序,工位1的P201至P210程序,工位2的P301至P310程序,改变机器人程序的同时必须改变对应的回转形式,当改变回转形式时,系统首先报警,当操作“错误复位”3秒后,报警消失,以此加以确认回转与机器人程序的对应,(详细对应关系见下机器人设置内容)然后操作“工位-1/工位-2”切换工位1及2,通过“+”与“-”调整将要设置或到达的翻转步号,操作工位1/2主轴旋转到指定角度,点击“位置确认”+ 系统主操作盒“中间停止”2.5秒,出现由“等待”变“结束”提示后,完成选定工位选定当前步的位置确认及记忆,此按钮请慎用~。
三、自动运转说明
1、示教机器人程序
2、按压“机器人启动”按钮,分别启动机器人伺服及进入自动模式,同时将手动/自动主令开关至自动侧,观察触摸屏显示系统信息,满足条件时,双手按压启动按钮。
3、防护门落下,对应工位侧防护帘升起,到位后,机器人程序执行。
机器人焊接操作教程到这里就结束了,由此可见人类智能已经慢慢融入到人们的生活中,利用焊接机器人,企业不用再为培养技术工而烦恼,而且更容易保障产品的质量,减少成本,是工业制造梦寐以求的设备,相信未来会创造出更多适合不同领域的机器人。
内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!
更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.。