悬挂运动控制系统的设计
浅析汽车底盘主动悬架控制方法
浅析汽车底盘主动悬架控制方法随着汽车技术的不断发展,汽车底盘主动悬架系统已经逐渐成为了一种常见的装备。
这种系统可以根据车辆当前的驾驶状态和路况来主动调节悬架硬度,提升行车舒适性和稳定性。
在本文中,我们将对汽车底盘主动悬架控制方法进行一个浅析。
一、主动悬架原理主动悬架是指车辆悬挂系统具备主动调节功能,通过传感器感知车身运动状态,再根据实时数据调节悬架系统的工作参数,实现对车身姿态和路面适应性的主动调节。
主动悬架主要包括主动减振和主动悬架控制两部分。
主动减振通过控制减振器的阻尼力来调节车辆的悬挂硬度;主动悬架控制则通过控制空气悬挂元件或电磁阻尼器来实现对车辆悬挂的主动调节。
二、主动悬架控制方法1. 传统悬架控制传统的悬架系统主要通过设置不同的弹簧和减振器来实现对车辆悬挂系统的调节。
这种悬架系统在工作过程中需要依靠车辆的行驶速度和路面情况来进行调节,无法实现主动的悬架控制。
因此在高速行驶和复杂路况下,传统悬架系统的性能会受到一定的限制。
主动悬架控制方法则是通过悬架系统内置的传感器和控制单元,实时感知车辆的运动状态和路面情况,并根据这些数据来主动调节悬架系统的工作参数。
目前主动悬架系统主要采用以下几种控制方法:(1)电子控制电子控制是主动悬架系统的核心技术之一,通过悬挂系统内置的控制单元收集和处理来自传感器的数据,并根据预设的悬架调节算法来控制悬挂系统的工作状态。
在电子控制技术的支持下,主动悬架系统可以根据车辆当前的行驶状态和路况主动调节悬架硬度,提升行车舒适性和稳定性。
(2)气动控制为了实现对悬架系统的精准控制,主动悬架系统还需要配备一套高效的控制算法。
主动悬架控制算法的设计主要考虑以下几点:姿态控制是主动悬架系统的重要功能之一,通过感知车辆的侧倾角和纵向加速度来调节悬架系统的工作状态,提升车辆的稳定性和操控性。
(2)路面适应(3)悬挂硬度调节主动悬架系统在汽车领域具有广泛的应用前景,目前已经成为了豪华车和高端车型的标配。
悬挂运动控制系统中软件算法设计与综合调试

系统中驱动装置采用步进 电机 ,由于 步距角是一定的 ,转速与单位时 间所给脉 冲 数是 成正 比的 ,在 转 动时 线距 离 可 以 很 容易计算出来 , 停止时也不存在惯性 , 易控 制 ,应 用于 控 制 精 度要 求 较 高 的场 合 。 在寻迹检测方面 ,系统采用反射式光 耦。 遇见黑色物体 , 发射管发射的光线被黑 色物体 吸收 , 接收管截止不导通 , 出一种 输 电平信号; 遇见 白色物体或浅色物体 , 由于 物体反光 , 使光耦接收管 导通 , 输出另外一 种 电平信号 ;单片机可以根据光耦输 出信 号 的 不 同 ,判断 轨 迹 位 置 ,控制 画笔 的 运 动。 画笔采用 自动控制的方式 , 在程序 中控 制它的抬起 与落下 。用一个三极 管驱动一 个 电磁 铁 作 为 画 笔的 主 控 元 件 ;当执 行 画 线命令时 ,以高 电平触发三极管使电磁铁 吸合 , 画笔 落 下;当 画线 命 令取 消 时 , 以低 电平触发三极管使电磁铁断 电, 画笔弹起。 并且在画笔旁安 了一个发光二极管 ,当画 笔划线时, 二极管点亮 , 不划线时熄灭 , 通 过二极管实时显示画笔的状态。为了避免 电磁铁对单片机干扰 , 采用光电隔离措施。 显 示 电 路 采 用 字 符 型 液 晶 AC 62 液晶显示屏具有轻薄短小、 M10 A。 低 压微功耗、体积小 、无辐射危险, 平面直角 显示 及影像稳 定不闪烁等优点 , 可视面积 大, 画面效果好 , 分辨率高 , 抗干扰能力强等 特点。 它足专门用 于显示英文 、 数字 、 符号 等点阵型液 晶显示模块 。 I 电路 简单 , 接: 1 不 需 要 扩 展外 围电路 。一片 7 L 2 3 P 4 S 7 将 0口 分 时 复 用作 为 液 晶 的数 据 输 入 ,用 P10 . P .作 为控制线 。 12
悬挂运动控制系统的设计
T c n l g .G n h u 3 10 ) e h o o y a z o 4 0 0
维普资讯
l 。 _ |
。
_ 。’
●
悬 挂
运动 控制系统的设计
t e D s g f S s e d d M v m n o t o S s e h e in o u p n e o e e tC n r l y tm
2 悬挂运动控制系统的软件设计 敏 件 用 C语 言 编 写 实现 电机 转 速 控 制 ,圆 轨
L石 - 聂
—-——_ L—广—— T J l ●
厂
标 望 运 速 。 和希 的 行 度
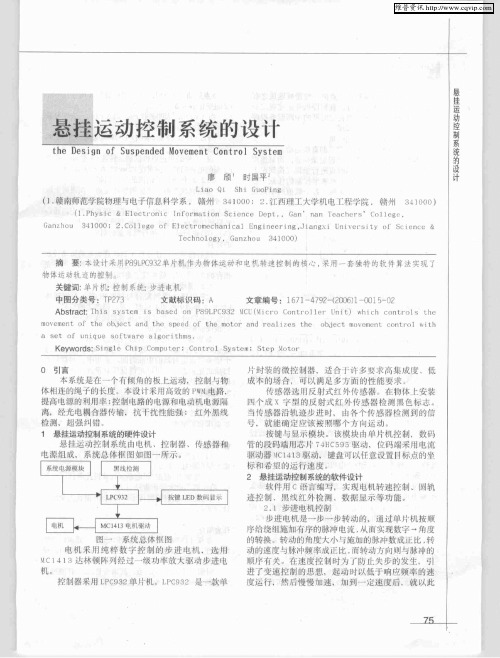
L _ L9 1 一按 L教显 迹 制 黑 红 检 、 据 示 功 — 一 P3 —_ 键E 码示J 控 、 线 外 测 数 显 等 能 叫 C2 D J _ 21 耋 鼍 . j . l l 一M4 } + C吣跏动l _ ] 赢黼 莓 喾
图一 系统总体框图 电机 采用纯 粹数 字拉 制的 步进 屯机 ,选 J = I 4 MI C 3达林顿阵列经过一级功率放 大驱 动步进 电 4l 机。 控制器采用 L C 3 P 9 2单片机。L C 3 是 一 P9 2 款单 的转换 转 动的角度大小与施加的脉冲数成正比 . 转 动的速度 与脉冲频率成l 比, E 而转动方向则与脉冲的 顺序有关 在速度控 制时为了防止失步的发生,引 进 了变速控 制的思想 ,起 动时以低于 响应频率 的速 度运行 .然后慢慢加速, 加到一定速度 后 就以此
悬挂式寻迹运动智能控制系统
论、信息处理、图像处理等专业技术于一体,其研究 体现 了信息科学与人] 智能技术结合的最 新成果 ,具 _ 有重要的军用及 民用价值,是 当前智能机 器人研究的 重点之一。国内外在移动机器人方面 己做出了大量的 研 究工 作H ,主 要的 问题在 于控制算 法缺 乏智 能性 J 和鲁 棒性 。文中介绍 了一款基 于M P 3F 4 处理 器 S 4 019
电工电气 (0 0 o1) 2 1 . N 2
悬挂式寻迹运动智能控铷系统
悬挂式寻迹运动智能控制系统
于跃 ,胡仁 杰 ,温 镇
( 东南大学 电气工程 学院 ,江苏 南京 2 9 ) 10 6 0
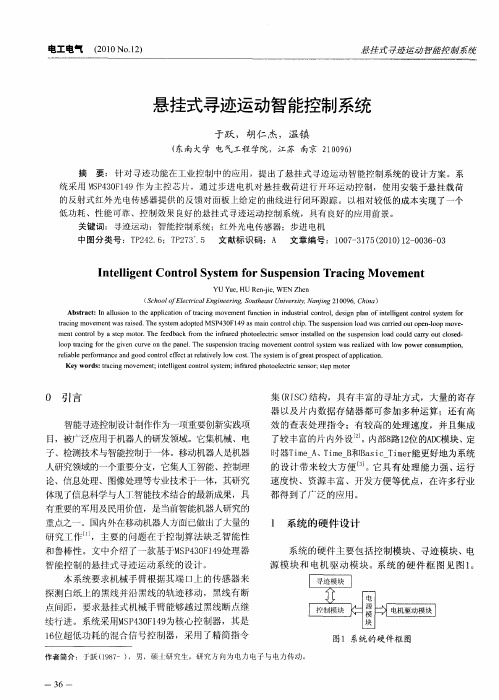
摘 要 :针 对寻迹功 能在工业控制 中的应用 ,提 出了悬挂式寻迹运动智能控制 系统 的设计方案 。系
ta i g mo e n sr ie . h y t m d p e SP 3 F1 9 a i o to h p Th u p n i n l a sc ri d o t p n—o p mo e r c n v me t wa a s d T e s se a o t d M 4 0 4 sma n c n r l i . es s e so o d wa ar e u e l o v — c o
me tc n r lb t p mo o . e f e b c r m h n r r d p t ee ti e s ri sa ld o h u p n i n l a o l a r u l s d n o to y a se t r Th e d a k fo t e i fa e ho o l c r s n o n t le n t e s s e so o d c u d c ry o t o e — c c l o r cn rt e g v n c Ⅳe o h a e . e s s e so r cn v m e tc n r ls se wa e l e t o p we o s mp i n o p ta i g f h i e u n t e p n 1 Th u p n i n ta i g mo e n o to y t m s r a i d wi l w o rc n u t . o z h o r l b ep ro m a c n o d c n r l fe t t e a ie y l w o t T y t m so r a r s e t pl ai n. e i l e f r n ea d g o o to c ltv l a e ar o c s. hes se i fg e tp o p c a i t of p c o Ke r : r cn v me t i t l g n o to y t m ; n a e h o l c r e o ; t p mo o y wo ds ta i g mo e n ; n e l e t n r ls s e i f r d p ot ee ti s ns r s e t r i c r c
基于DSP的步进电动机悬挂运动控制系统实现
0引 言
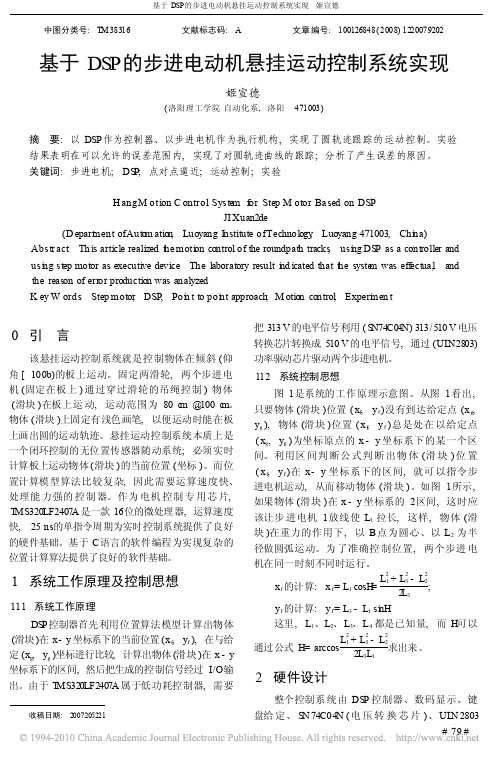
该悬挂运动控制系统就是控制物体在倾斜 (仰 角 [ 100b)的板上运动。固定两滑轮, 两个步进电 机 (固定在板上 ) 通过穿过滑轮的吊绳控制 ) 物体 (滑块 )在板上运 动, 运动范围为 80 cm @100 cm。 物体 (滑块 )上固定有浅色画笔, 以便运动时能在板 上画出圆的运动轨迹。悬挂运动控制系统本质上是 一个闭环控制的无位置传感器随动系统; 必须实时 计算板上运动物体 (滑块 )的当前位置 (坐标 )。而位 置计算模型算法比较复杂, 因此需要运算速度快、 处理能 力强的 控制 器。作为 电机 控制 专 用芯 片, TMS320LF2407A 是一款 16位的微处理器, 运算速度 快, 25 ns的单指令周期为实时控制系统提供了良好 的硬件基础。基于 C语言的软件编程为实现复杂的 位置计算算法提供了良好的软件基础。
中图分类号: TM 38316
基于 DSP的步进电动机悬挂运动控制系统实现 姬宣德
文献标志码: A
文章 编号: 100126848( 2008) 1220079202
基于 DSP的步进电动机悬挂运动控制系统实现
姬宣德
( 洛阳理工学院 自动化系, 洛阳 471003)
摘 要: 以 DSP 作为控制器、以步进电机作为执行机构, 实现了圆轨迹跟踪的运动控制。实验 结果表明在可以允许的误差范围内, 实现了对圆轨迹曲线的跟踪; 分析了产生误差的原因。 关键词: 步进电机; DSP; 点对点逼近; 运动控制; 实验
# 79#
微电机
(功率驱动芯片 )和步进电机组成; 硬件构成为图 2 所示。数码显示用于显示物体 (滑块 )的当前位置。 键盘用于给定位置。 SN74C04N (电压 转换芯片 ), 用于把 DSP 控制器输出的 313 V 电压转换成 510 V 电压。电压转换芯片的引脚 A1、 A2、 A3、A4 为输 入信号, Y1、 Y2、 Y3、 Y4 为输 出信 号。 A1、 A2、 A3、 A4 与 DSP 芯片的输出引脚 P0、 P1、 P2、 P3 相 连, Y1、 Y2、 Y3、 Y4 分别 与功率 驱动 芯片 的 1、 2、 3、 4引脚 相连, 作为 输出信号。 ULN2803 (功 率驱动芯片 )用于放大 DSP 的输出信号以驱动步进 电机。功率驱动芯片是将输入 5 V 电 压转换为 12 V 电压输出, 以驱动步进电机。步进电机作为执行 机构, 拖动物体 (滑块 )运动。
主动式悬挂系统设计及其在汽车操控性能中的研究
主动式悬挂系统设计及其在汽车操控性能中的研究引言汽车行驶时的悬挂系统是影响汽车操控性能的关键因素之一,其直接影响车辆行驶的平稳性、舒适性、安全性和操控性等方面。
传统的悬挂系统通常采用被动式悬挂结构,但随着汽车工业的不断发展和技术的进步,主动式悬挂系统逐渐成为汽车行业的一个热点研究课题。
本文将介绍主动式悬挂系统的设计原理和其在汽车操控性能中的重要作用,为读者对该领域有更深入的了解和认识提供参考。
主动式悬挂系统的设计原理传统的被动式悬挂系统通过减震器、弹簧和悬架等结构组成,在汽车行驶过程中承受车辆的冲击和震动,以达到保持车身稳定和悬挂系统对路面的适应性。
而主动式悬挂系统则采用先进的电控技术,通过检测车辆的运动状态和路面反馈信息,控制悬挂系统的行为来对路面的反应进行自适应调整,以改善车辆的行驶稳定性、舒适性和安全性。
主动式悬挂系统主要由以下几个关键部分组成:1. 悬挂系统传感器:用于检测车辆运动状态以及路面反馈信息。
2. 控制单元:负责接收传感器信号、开展计算和控制悬挂系统的行为。
3. 调节阀或执行机构:用于调整悬挂系统的行为。
主动式悬挂系统的调节方式通常分为两种:1. 电控调节:通过电控技术调整悬挂系统的行为,包括硬度、反弹和压缩等方面。
2. 液压调节:通常采用阀门或执行机构,通过调整油路来控制减震器的行为。
主动式悬挂系统在汽车操控性能中的研究主动式悬挂系统对汽车操控性能的提升是显著的,其主要表现在以下几个方面:1. 悬挂系统自适应调整:主动式悬挂系统通过检测车辆状态和路面反馈,自动调整悬挂系统,以适应不同的路况和驾驶风格,使车辆行驶更为平稳和舒适。
2. 悬挂系统负载调整:主动式悬挂系统可以根据车辆负载变化和行驶状态的不同,调整悬挂系统的硬度和结构,以保持其对路面的适应性和稳定性。
3. 悬挂系统弹簧压缩调节:主动式悬挂系统可以根据路面的情况和车速的不同,调节弹簧的压缩行为,以减少车辆的颠簸和摇晃,提高行驶的稳定性。
TMS320F28027与L298N的悬挂运动控制系统设计

TMS320F28027与L298N的悬挂运动控制系统设计程章格;谷若雨;王海波;刘和平;邓力【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2014(14)5【摘要】介绍了由TMS320F28027和 L298N模块以及编码器组成的悬挂运动控制系统。
该系统通过控制2个步进电机,控制轴上线的收放来达到使悬挂物在平面内任意运动的效果,以实现画圆或指定图案和显示当前坐标等功能。
主要介绍了步进电机的控制算法和利用TMS320F28027芯片实现位置闭环控制的方法。
该系统具有高效、稳定、准确等优点。
%The suspended movement control system which is consist of TMS320F28027,L298N module and absolute rotary encoder.The system simultaneously controls two step motors to move freely in a plane surface by rolling the line of the step motor’s control shaft, and it achieves the function of circling,drawing specified patterns,displaying the current coordinates,and so on.This paper focuses on the exploration of the control algorithms under control and the way to conduct the chip TMS320F28027.The system has the advantages of stability,efficiency and accuracy.【总页数】4页(P49-51,55)【作者】程章格;谷若雨;王海波;刘和平;邓力【作者单位】重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044【正文语种】中文【中图分类】TM301.2【相关文献】1.基于MSP430F449的悬挂运动控制系统设计 [J], 费婷婷;刘蓉;周乐意;袁子晴2.基于FPGA控制的悬挂运动控制系统设计 [J], 谭菊华;王东波;刘桥3.基于MCS-51单片机的悬挂运动控制系统设计 [J], 张程;聂虹4.悬挂运动控制系统设计 [J], 芮长城;温阳东;方龙5.基于单片机的悬挂运动控制系统设计 [J], 李积英因版权原因,仅展示原文概要,查看原文内容请购买。
悬挂运动控制系统报告
悬挂运动控制系统设计与总结报告摘要:本系统以宏晶科技的16位单片机STC89C52RC为控制核心,通过对所需运动的轨迹曲线的参数方程,并对两组步进电机采用一定的算法进行控制,实现悬挂画笔在给定范围内的定点运动、直线运动、圆心定点的半径为5厘米的圆周运动等功能。
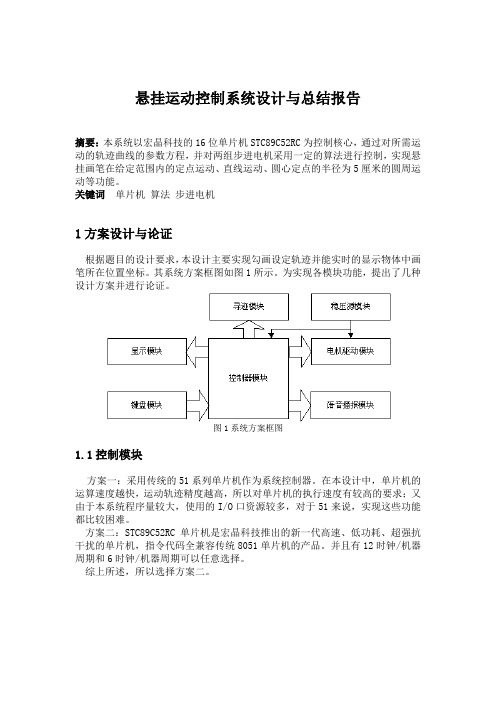
关键词单片机算法步进电机1方案设计与论证根据题目的设计要求,本设计主要实现勾画设定轨迹并能实时的显示物体中画笔所在位置坐标。
其系统方案框图如图1所示。
为实现各模块功能,提出了几种设计方案并进行论证。
图1系统方案框图1.1控制模块方案一:采用传统的51系列单片机作为系统控制器。
在本设计中,单片机的运算速度越快,运动轨迹精度越高,所以对单片机的执行速度有较高的要求;又由于本系统程序量较大,使用的I/O口资源较多,对于51来说,实现这些功能都比较困难。
方案二:STC89C52RC 单片机是宏晶科技推出的新一代高速、低功耗、超强抗干扰的单片机,指令代码全兼容传统8051单片机的产品。
并且有12时钟/机器周期和6时钟/机器周期可以任意选择。
综上所述,所以选择方案二。
1.2电机驱动模块方案一:采用一般的直流电机,但是直流电机电枢绕组转动惯量大,比同功率交流电机转动惯量大几倍,相对不容易控制,导致精确度下降。
方案二:采用步进电机。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
综上所述,所以选择方案二。
1.3液晶显示模块方案一:采用数码管显示。
数码管作为一种应用十分普遍的显示器件,可以在各种各样的设备上见到。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考范文
开题报告
(200 届)
题目悬挂运动控制系统的设计
学院物理电气信息学院
专业电气工程与自动化
年级0
学生学号1200
学生姓名
指导教师
2010年 3 月1 日
一、课题来源
物理电气信息学院毕业设计指南
二、选题的意义以及国内外发展状况
随着社会的发展、科技的进步以及人们生活水平的逐步提高,各种方便于生活的自动控制系统开始进入了人们的生活,以单片机为核心的悬挂运动自动控制系统就是其中之一。
在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。
靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围,但受技术上的制约,使用也有一定限制。
采
用FPGA(现场可编辑门列阵)作为系统控制器。
FPGA可以实现各种复杂的逻辑功能,规模大,集成度高,体积小,稳定性好,并且可利用EDA软件进行仿真和调试。
FPGA 采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求较高的系统。
本设计中,FPGA的高速处理能力得不到充分发挥。
所以在本次设计中,主要是以单片机AT89C52作为控制核心,并与LED液晶显示芯片、步进电机、单光束反射取样式光电
传感器,4*4键盘和鼠标相结合的系统。
充分发挥了单片机的性能。
以单片机AT89C52芯片设计悬挂运动控制系统的控制器,通过输入模块传送控制参数,采用C语言对单片机进行编程实现各项功能,驱动步进电机,对悬挂运动物体进行精确的控制。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用价值。
运动轨迹控制系统广泛应用于航天、军事、机器人控制、数控机床及计算机辅助设计等,随着电子技术、计算机技术、自动控制和精密测量技术的不断发展和迅速应用,在各领域特别在制造业,正向高速、高精度、多功能、智能化、开放型以及高可靠性等方面迅速发展。
近二十年来,科学技术突飞猛进,随着电力电子技术、计算机技术和控制理论的发展,使得电机的应用不再局限于工业应用,而且在商业及家用设备等各个领域获得更加广泛的应用。
而随着新材料如稀土永磁材料Nd-Fe-B,磁性复合材料的出现,更给电机设计插上翅膀,各种新型,高效特种电机层出不穷。
这些都极大地丰富了电机理论,拓
宽了电机的应用领域。
同时给电机设计和制造工艺提出了更高的要求。
当今世界,工业生产越来越要求自动化、省人力、效率高等特点,工厂里的很多自动化控制系统都用到了电机。
综上所述,研究如何来控制电机的转动在当今世界具有很强的现实意义和经济价值。
目前悬挂运动控制系统在国内外许多行业中都有着广泛的应用。
随着社会的发展,人们对悬挂运动控制系统提出了更高的要求。
悬挂运动控制系统的设计分为硬件设计和软件设计。
为了满足发展的不断需要,广大设计人员正寻求从硬件和软件两个方面取得更大的突破。
悬挂运动控制系统应该解决的主要问题是控制器如何控制电机的转动,通过控制器发出脉冲驱动,让两个电机转动,改变两端吊绳的长度,从而使吊绳上的物体在倾斜的板面上运动,在物体上固定有浅色的画笔,一边运动时在板上画出运动轨迹。
整个系统的设计分为硬件设计和软件设计两个部分。
硬件设计的核心是控制模块,主要解决单片机与电机的接口和电机的驱动。
软件设计主要对悬挂运动物体做各种不同的运动进行编程。
三、研究内容、方法、手段及预期成果
1.系统结构方案与控制策略选择
⑴系统结构方案选择
①核心控制器方案选择
方案一:采用传统的8位89C52单片机作为运动物体的控制中心。
52单片机具有价格低廉,使用简单等特点,但其运算速度低,功能单一,RAM、ROM空间小等缺点。
本题目在确定圆周坐标值时,需要进行大量的浮点数运算,若采用89C52需要做RAM,ROM来扩展其内存空间,其硬件工作量将会增多。
方案二:采用16位单片机SPCE061A作为运动物体的控制中心。
SPCE061A具有丰富的资源:RAM,ROM空间大、指令周期短、运算速度快、低功耗、低电压、可编程音频处理,易于编写和调试等优点。
尤其在复杂的数学运算,其运算速度快,精度高,在控制步进电机时运行速度比一般52单片机快。
由于我目前手中没有16位单片机SPCE061A的开发环境和仿真软件,而89C52可以采用传统的keil和protues软件结合,易于实现仿真工作,具有较强的说服力。
基于上述分析,拟选择方案一。
②位置测量方案的选择
方案一:采用步进电机实现对悬挂物体的定位。
由于步进电机可对旋转角度进行精确控制,因此可以得到悬挂线的精确角位移,从而可以计算出线位移,进而可以得到悬挂物的精确位置,实现悬挂物的精确定位。
常用的有两相四线步进电机与两相六线步进电机等,转动一步精度可达到0.9°,线位移误差可以达到毫米级。
步进电机以L298芯片作为时序脉冲产生电路,就能实现控制效果,硬件电路结构相对简单,易于实现。
方案二:采用直流电机结合光电码盘实现对悬挂物体的定位。
此方案是将光电脉冲信号转化为角位移量,是工业控制中常用的方法。
编码盘转轴与直流电机转轴相连,通过安装在码盘两侧的透射式红外对管测得电机转过的角位移,电机运转平稳,精度可以得到保证。
只是电机角位移的测量电路与直流电机驱动电路结构复杂,难于实现。
在本设计中,因考虑到画笔画图准确性与电路复杂性,选择第一种方案,并采用控制性能高的步进电机来控制运动物体。
③任意轨迹探测方案的选择
方案一:采用反射式红外传感器阵列。
通过多个红外头的探测信号得到悬挂物的行走轨迹。
由于黑色物体与白色物体的反射系数不同,从而实现对黑白物体的分辨。
这是一种普遍的应用。
但其缺点是(1)、要不断地调整各传感器之间的距离,否则,由于反射距离较短,红外反射功率较小。
如果板面的纸张凸凹不平,或白纸表面有杂物,也会使单片机误判。
(2)、由于板面的黑线可能是墨水或者胶布,两种颜色都是黑的,但经实际实验发现它们的反光程度均不同,也会对红外传感器造成一定干扰。
方案二:采用光电传感器检测。
当光线照射到滑块运动的表面上时,会发生反射。
由于黑线与白纸的反射系数不同,光电传感器可根据接收到的反射光强弱来判断是否偏离黑线。
使用五个集成的反射式光电传感器,一个固定在悬挂物体的中间,其余四个位于悬挂物体的边上,中间的传感器可以起到主控作用,引起中断。
当物体运动时,若中间的传感器的状态没有变化,则周围四个传感器不会引起运动的变化,而继续原来的运动。
只有当中间传感器的状态发生变化时,才看周围四个传感器是否有状态变化,根据最先变化的传感器来确定物体运动偏离方向,然后单片机控制电机调整悬挂物体的运动,直至中间的传感器恢复原状态为止。
基于以上分析比较,选用了抗干扰能力强的方案二。
经过反复比较与论证,最终确定系统的系统框图如下图所示:
系统框图
⑵控制策略的方案选择(PID,模糊PID等)
方案一:采用开环控制系统。
通过对电机输出量的测量,来实现距离量的测量。
因开环控制系统不具有修正由于扰动而出现的悬挂模块实际走过的路程与计算输出量的偏差,故抗干扰能力差。
方案二:采用局部闭环控制系统。
在系统运动的指定轨迹上,加入反馈修正子模块。
在外壁不导电的漆包线上,每隔一段固定距离,刮掉一小段油漆露出导线芯,通过对导线芯的探测,达到测量实际路程值的目的,构成一个局部闭环控制系统。
显然,局部闭环控制系统对系统精度有很大程度提高,故选择方案二。
…………
2. 软件设计
该软件主要由四部分组成:主程序、中断子程序、电机驱动子程序和液晶显示子程序。
系统的软件设计采用了C语言,利用keil与protues软件,实现悬挂运动控制系统的仿真,从而完成了设计的各项功能和指标要求。
三、任务完成的阶段安排及时间安排
1—3周查阅文献资料,深入了解该系统的原理与控制方法写文献综述……
参考文献
[1 ] 潘新民,王燕芳编著. 微型计算机控制技术[M] . 北京:电子工业出版社,2004.
[2 ] 孙鹤旭编著. 交流步进传动系统[M] . 北京. 机械工业出版社,1996.
[3 ] 吴守缄,臧英杰著. 电气传动的脉宽调制控制技术[M] .北京:机械工业出版社,2000.
[4 ] 王晓民,王铃编著. 电动机的DSP 控制[M] . 北京:北京航空航天大学出版社,2005.
[5 ] 谭浩强著. C 程序设计(第二版) [M] . 北京:清华大学出版社,1999.
[6 ] 霍迎辉,陈宇翔著. 步进电机的微机和单片机控制[J ] .电机技术,2005 , (4) :25 - 26.
[7 ] 刘作新著. 高电压大电流电机驱动芯片L298[J ] . 电子世界,2003 , (9) :66 - 68.
[8 ] 朱定华编著. 单片机原理及接口技术实验[M] . 北京:清华大学出版社,2002.。