悬挂运动控制系统(E题)设计报告之欧阳家百创编
悬挂运动控制系统设计

悬挂运动控制系统(E题)摘要本系统在嵌入式操作系统基础上,使用两块单片机协调工作,对悬挂物体的运动进行实时控制。
系统通过两个步进电机的配合完成了平面任意曲线运动,通过光电传感器配合循迹算法迅速有效地完成了循迹运动。
运动的精度为毫米级,过渡时间不超过1分钟。
同时,使用了点阵式LCD配合PS/2鼠标等外围设备,提供了良好的交互界面。
AbstractThis design bases on an embedded operating system, and uses two pieces of SCM to take real time control of a suspender’s movement in a planar plane. The system can move in any designed way with the cooperation of two step-motors, and do a quick tracing movement because of a special arithmetic, which is based on an array of photoelect ric sensors. The position’s precision of the movement can achieve a level of millimeter, and its transition time is less than 1 minute. Meanwhile, with a LCD and a mouse which follows PS/2 protocol and other input/output devices, it can provide a friendly and humanistic man-machine conversation.一、方案论证与比较从控制系统的角度来看,采用闭环控制方式比采用开环控制的效果要好。
悬挂运动控制系统(E题)
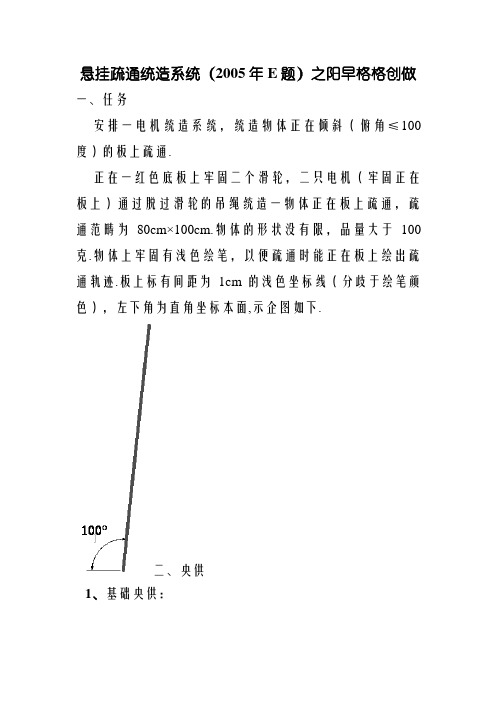
悬挂疏通统造系统(2005年E题)之阳早格格创做一、任务安排一电机统造系统,统造物体正在倾斜(俯角≤100度)的板上疏通.正在一红色底板上牢固二个滑轮,二只电机(牢固正在板上)通过脱过滑轮的吊绳统造一物体正在板上疏通,疏通范畴为80cm×100cm.物体的形状没有限,品量大于100克.物体上牢固有浅色绘笔,以便疏通时能正在板上绘出疏通轨迹.板上标有间距为1cm的浅色坐标线(分歧于绘笔颜色),左下角为直角坐标本面,示企图如下.二、央供1、基础央供:(1)统造系统不妨通过键盘或者其余办法任性设定坐标面参数;(2)统造物体正在80cm×100cm的范畴内做自止设定的疏通,疏通轨迹少度没有小于100cm,物体正在疏通时不妨正在板上绘出疏通轨迹,限300秒内完毕;(3)统造物体做圆心可任性设定、直径为50cm的圆周疏通,限300秒内完毕;(4)物体从左下角坐标本面出收,正在150秒内到达设定的一个坐标面(二面间直线距离没有小于40cm).2、收挥部分(1)不妨隐现物体中绘笔天圆位子的坐标;(2)统造物体沿板上标出的任性直线疏通(睹示企图),直线正在尝试时现场标出,线宽~,总少度约50cm,颜色为乌色;直线的前一部分是连绝的,少约30cm;后一部分是二段总少约20cm的间断线段,间断距离没有大于1cm;沿连绝直线疏通规定正在200秒内完毕,沿间断直线疏通规定正在300秒内完毕;(3)其余.三、评分尺度四、证明1、物体的疏通轨迹以绘笔划出的痕迹为准,应尽管使物体疏通轨迹与预期轨迹符合,共时尽管支缩疏通时间;2、若正在某项尝试中疏通超出规定的时间,该名目没有得分;3、疏通轨迹与预期轨迹之间的偏偏好超出4cm时,该名目没有得分;4、正在基础央供(3)、(4)战收挥部分(2)中,物体启初疏通前,允许脚动将物体定位;启初疏通后,没有克没有及再人为搞预物体疏通;5、竞赛中断时,统造系统启存上接赛区组委会,尝试用板(板上含空黑坐标纸) 尝试时自戴.电动车跷跷板(F题)【本科组】一、任务安排并创造一个电动车跷跷板,正在跷跷板起初端A一侧拆有可移动的配沉.配沉的位子不妨正在从初端启初的200mm~600mm范畴内安排,安排步少没有大于50mm;配沉可拆置.电动车从起初端A出收,不妨自动正在跷跷板上止驶.电动车跷跷板起初状态战仄稳状态示企图分别如图1战图2所示.二、央供1.基础央供正在没有加配沉的情况下,电动车完毕以下疏通:(1)电动车从起初端A出收,正在30秒钟内止驶到核心面C附近;(2)60秒钟之内,电动车正在核心面C附近使跷跷板处于仄稳状态,脆持仄稳5秒钟,并给出明隐的仄稳指示;(3)电动车从(2)中的仄稳面出收,30秒钟内止驶到跷跷板终端B处(车头距跷跷板终端B没有大于50mm);(4)电动车正在B面停止5秒后,1分钟内倒退回起初端A,完毕所有路程;(5)正在所有止驶历程中,电动车终究正在跷跷板上,并分阶段真时隐现电动车止驶所用的时间.将配沉牢固正在可安排范畴内任一指定位子,电动车完毕以下疏通:(1)将电动车搁置正在大天距离跷跷板起初端A面300mm 以中、90°扇形天区内某一指定位子(车头往背跷跷板),电动车不妨自动驶上跷跷板,如图3所示:(2)电动车正在跷跷板上博得仄稳,给出明隐的仄稳指示,脆持仄稳5秒钟以上;(3)将另一齐品量为电动车品量10%~20%的块状配沉搁置正在A至C间指定的位子,电动车不妨沉新博得仄稳,给出明隐的仄稳指示,脆持仄稳5秒钟以上;(4)电动车正在3分钟之内完毕(1)~(3)齐历程.(5)其余.三、证明(1)跷跷板少1600mm、宽300mm,为便于携戴也可将跷跷板造成合叠形式.(2)跷跷板核心牢固正在直径没有大于50mm的半圆轴上,轴二端支撑正在支架上,并包管与支架圆滑交战,能机动转化.(3)尝试中,使用参赛队自造的跷跷板拆置.(4)允许正在跷跷板战大天上采与带领步伐,然而没有得做用跷跷板里战大天仄坦.(5)电动车(含加正在车体上的其余拆置)形状尺寸确定为:少≤300mm,宽≤200mm.(6)仄稳的定义为A、B二端与大天的距离好d=∣d A-d B∣没有大于40mm.(7)所有路程约为1600mm减来车少.(8)尝试历程中没有允许人为统造电动车疏通.(9)基础央供(2)没有克没有及完毕时,不妨跳过,然而没有克没有及得分;收挥部分(1)没有克没有及完毕时,不妨间接从(2)项启初,然而是(1)项没有得分.四、评分尺度音导引系统(B题)【本科组】一、任务安排并创造一声音导引系统,示企图如图1所示.图中,AB与AC笔直,Ox是AB的中垂线,O'y 是AC的中垂线,W是Ox战O'y的接面.声音导引系统有一个可移动声源S,三个声音接支器A、B战C,声音接支器之间不妨有线对接.声音接支器能利用可移动声源战接支器之间的分歧距离,爆收一个可移动声源离Ox线(或者O'y线)的缺面旗号,并用无线办法将此缺面旗号传输至可移动声源,带领其疏通.可移动声源疏通的起初面必须正在Ox线左侧,位子不妨任性指定.二、央供1.基础央供(1)创造可移动的声源.可移动声源爆收的旗号为周期性音频脉冲旗号,如图2所示,声音旗号频次没有限,脉冲周期没有限.(2)可移动声源收出声音后启初疏通,到达Ox线并停止,那段疏通时间为响当令间,丈量响当令间,用下列公式估计出赞同的仄稳速度,央供仄稳速度大于 5cm/s.(3)可移动声源停止后的位子与Ox线之间的距离为定位缺面,定位缺面小于3cm.(4)可移动声源正在疏通历程中任性时刻超出Ox线左侧的距离小于5cm.(5)可移动声源到达Ox线后,必须有明隐的光战声指示.(6)功耗矮,性价比下.2.收挥部分(1)将可移动声源转背180度(可脚动安排收声器件目标),不妨沉复基础央供.(2)仄稳速度大于10cm/s.(3)定位缺面小于1cm.(4)可移动声源正在疏通历程中任性时刻超出Ox线左侧距离小于2cm.(5)正在完毕基础央供部分移动到Ox线上后,可移动声源正在本天停止5s~10s,而后利用接支器A战C,使可移动声源疏通到W面,到达W面以来,必须有明隐的光战声指示并停止,此时声源距离W的直线距离小于1cm.所有疏通历程的仄稳速度大于10cm/s.(6)其余.三、证明1. 本题必须采与组委会提供的电机统造ASSP芯片(型号MMC-1)真止可移动声源的疏通.2. 正在可移动声源二侧必须有明隐的定位标记线,标记线宽度0.3cm且笔直于大天.3. 缺面旗号传输采与的无线办法、频次没有限.4. 可移动声源的仄台形式没有限.5. 可移动声源启初运止的目标应战Ox线脆持笔直.6. 没有得依赖其余非声音导航办法.7. 移动历程中没有得人为对于系统施加做用.8. 接支器战声源之间没有得使用有线对接.四、评分尺度。
悬挂运动控制系统
悬挂运动控制系统(E题)摘要:本设计采用单片机AT89C55作为悬挂运动的检测和控制核心。
采用四只反射式红外传感器检测板上的黑色曲线,控制物体沿黑线运动。
利用可编程器件GAL16V8实现的脉冲分配器和大功率驱动电路L298共同组成步进电机的驱动电路,结合软件控制电机的转向和转速。
基于可靠的硬件设计和稳定精确的软件算法,实现了物体在斜板上作圆周运动、定点运动和画板上标出的任意曲线运动。
LCD320240作为液晶显示界面容量大,显示内容丰富,通过与键盘结合设置坐标点和选择运动方式,并能直观显示画笔所在的位置,具有良好的人机交互功能。
系统增加了由AT89C51控制的无线数据传输功能实现了对系统的远程控制,并采用双口RAM IDT7132将主控制CPU AT89C55和AT89C51进行隔离,保证数据传输的稳定性和可靠性。
关键词:步进电机,红外检测,双口RAMAbstract: In this design, microcomputer AT89C55 was applied as the control center. Four reflecting-infrared sensors were used to detect black lines and to keep the object moving along the black line. Stepping motors’s turning and rotating speed were controlled by the drive circuit, which are constituted by GAL16V8 and L298. Based on the reliable hardware design and the precise software algorithm, the object has successfully fulfilled circular movements, movements on a certain point and arbitrary curvy movements shown on the board. In order to make the design more intelligent, LCD320240 was employed as display interface, indicating the location of the painting brush intuitionistically. By combining the keyboard and DS1302 LCD, this design has also achieved coordinate points setting and movement manner selecting. The additional function of radio data transmission which is controlled by AT89C51,made available the long-distance control of the system. CPU AT89C55 and AT89C51 are separated by IDT7132 to ensure data stability and security.Key word: stepping motor, reflecting-infrared sensors, dual-port RAM目录1.系统方案论证与比较 (4)1.1 设计思路 (4)1.2 方案选择与论证 (4)1.2.1 总体方案选择与论证 (4)1.2.2 各模块方案选择与论证 (5)1.2.2.1 控制器选择与论证 (5)1.2.2.2 电机驱动方案的选择与论证 (5)1.2.2.3黑线检测方案的选择与论证 (6)1.2.2.4 键盘方案的选择与论证 (6)1.2.2.5 显示方案的选择和论证 (7)1.2.2.6无线数据传输方案的选择与论证 (7)1.3系统各模块的最终方案 (7)2. 系统的硬件设计与实现 (8)2.1系统硬件的基本组成部分 (8)2.2 主要单元电路的设计 (8)2.2.1 单片机控制电路 (8)2.2.2 电机驱动电路 (9)2.2.3 黑线检测电路 (10)2.2.4 键盘/显示电路 (11)2.2.5 无线发射接收电路 (12)2.2.6 自制电源电路 (13)3. 系统的理论分析与计算 (14)3.1物体到达设定坐标点过程的理论分析与计算 (14)3.2 圆周运动理论分析与计算 (15)3.3 黑线检测理论分析 (17)4. 系统的软件设计 (18)4.1系统主程序流程图 (18)4.2 键盘子程序 (20)4.3 指定坐标运动子程序 (20)4.4黑线检测子程序 (20)5. 系统测试与分析 (22)5.1 测试仪器 (22)5.2 测试方案、数据及结果分析 (23)5.2.1 自行设定运动测试 (23)5.2.2 圆周运动测试 (23)5.2.3 指定坐标运动测试 (24)5.2.4 黑线检测测试 (25)6. 结束语 (25)参考文献 (25)附录1:主要元器件清单 (26)附录2 系统原理图 (27)附录 3 系统使用说 (28)附录4 程序清单 (29)1.系统方案设计与比较1.1 设计思路题目要求设计一电机控制系统来控制物体在倾斜(仰角≤100°)的板上运动。
悬挂运动控制系统设计报告
悬挂运动控制系统设计王奇彪 梁美 谭延龄摘要:本系统采用STC89C52单片机作为悬挂控制系统的检测和控制核心,实现通过人机界面对物体所作运动进行设定,通过LCD 实时显示此时画笔所在的坐标值;系统具有可画出相应的运动轨迹,可自动跟踪曲线运动,和画圆运动等功能。
运动参数的设定通过红外遥控输入。
系统通过比较当前画笔所在位置与设定的位置的差异以及运动类型,控制步进电机完成相应运动;曲线跟踪采用红外对射式传感器来实现。
关键词: STC89C52单片机 LCD 红外遥控 红外传感器一、方案论证根据题目要求,系统由图(1)中模块组成:图(1)(1)、控制模块的设计方案论证与选择方案一:采用FPGA (现场可编辑门列阵)作为系统控制器。
FPGA 可以实现各种复杂的逻辑功能、规模大、集成度高、体积小、稳定性好,并且可利用EDA 软件进行仿真和调试。
FPGA 采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求比较高的系统。
在本设计中FPGA 的高速处理能力得不到充分发挥。
方案二:采用SPCE061A 单片机来实现,次单片机内置8路10位ADC 和2路DAC ,避免了外接A/D 转换芯片和D/A 转换芯片,并且I/O 接口比较多,易于扩展外围电路,开发板集成了语音播报的硬件,通过软件编程即可以用于语音采集和播报,集成开发环境中配有很多语音API 函数,实现语音播放比较简单,另外方便的是该芯片内置在线仿真、编程接口,可以方便实现在线调试,这大大简化了系统的开发和调试的复杂度。
方案三:采用C8051F020作为系统控制器器。
次单片机运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制。
由于其功耗低、体积小、技术成熟等优点,各个领域应用广泛。
在本系统中使用芯片引脚少,没有使用模数转换芯片,在硬件上很容易实现。
因此,在本设计中采用C8051F020处理输入的数据并控制电机运动。
(2)、曲线跟踪模块的设计方案论证与选择方案一:通过开关型霍尔传感器来实现,但是由于该方法只能跟踪磁性物质组成的曲线,成本高、安装起来比较麻烦,而且容易受环境中磁性物质的干扰,控制模块 曲线跟踪模块 电源模块键盘输入模块 显示模块 电机驱动模块抗干扰性能不好。
悬挂运动控制系统
2015年全国大学生电子设计竞赛论文X题:悬挂运动控制系统2015年8月15日悬挂运动控制系统(E题)摘要本设计使用AT89S52单片机作为悬挂运动控制系统的核心,硬件电路包含液晶显示和键盘处理模块,步进电机驱动模块,黑线循迹检测模块,数据传输模块等几部分。
液晶显示屏负责显示系统状态和控制命令,调试时还可以方便的显示每个红外传感器的状态;键盘接收输入的控制指令;电机驱动采用脉宽调制技术,可灵活方便地控制两个步进电机;反射式红外传感器模块在循迹时检测引导黑线;数据传输模块上的AT89C2051单片机将红外传感器状态信息通过串行口传送至AT89S52控制核心,使之能根据程序算法驱动两个步进电机带动悬挂物按要求运动并同时显示各种状态数据。
关键词:步进电机,脉宽调制,红外传感器,循迹,算法AbstractIn this design,the control kernel of this hanging movement system is based on a MCU chip AT89S52.The hole hardware circuit is composed of the following modules:LCD display and keyboard module,step motors drive module,track detecting module and data transfer module.The LCD displays system status,command and also the status of infrared sensors when debugging.The keyboard receives user’s command.The motors drive module adopts PWM technology to control motors’ status flexibly and conveniently.The reflecting infrared sensors detect black lines when tracking.The AT89C2051 on the data transfer module transfers data to AT89S52 through UART so as to make motors work properly according to program algorithm and display status data needed.Keywords: step motor,PWM,infrared sensor,tracking,algorithm一、方案论证及比较1、电机的选择和论证方案一:采用普通直流电机。
运动控制系统思考题和课后习题答案之欧阳体创编
电力拖动自动控制系统-运动控制系统(阮毅陈伯时)课后答案包括思考题和课后习题第2章2-1 直流电动机有哪几种调速方法?各有哪些特点?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
特点略。
2-2 简述直流PWM 变换器电路的基本结构。
答:直流PWM 变换器基本结构如图,包括IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流PWM 变换器,通过改变直流PWM 变换器中IGBT 的控制脉冲占空比,来调节直流PWM 变换器输出电压大小,二极管起续流作用。
2-3 直流PWM 变换器输出电压的特征是什么?答:脉动直流电压。
2=4 为什么直流PWM 变换器-电动机系统比V-M 系统能够获得更好的动态性能?答:直流PWM 变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流PWM 变换器的时间常数Ts 等于其IGBT 控制脉冲周期(1/fc),而晶闸管整流装置的时间常数Ts 通常取其最大失控时间的一半(1/(2mf)。
因fc 通常为kHz 级,而f 通常为工频(50 或60Hz)为一周内),m 整流电压的脉波数,通常也不会超过20,故直流PWM 变换器时间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
2=5 在直流脉宽调速系统中,当电动机停止不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流PWM 变换器的输出。
电枢回路中还有电流,因为电枢电压和电枢电阻的存在。
2-6 直流PWM 变换器主电路中反并联二极管有何作用?如果二极管断路会产生什么后果?答:为电动机提供续流通道。
若二极管断路则会使电动机在电枢电压瞬时值为零时产生过电压。
2-7 直流PWM 变换器的开关频率是否越高越好?为什么?答:不是。
因为若开关频率非常高,当给直流电动机供电时,有可能导致电枢电流还未上升至负载电流时,就已经开始下降了,从而导致平均电流总小于负载电流,电机无法运转。
悬挂运动控制系统(E题)
悬挂运动控制系统(E题)摘要:本设计采用单片机AT89C55作为悬挂运动的检测和控制核心。
采用四只反射式红外传感器检测板上的黑色曲线,控制物体沿黑线运动。
利用可编程器件GAL16V8实现的脉冲分配器和大功率驱动电路L298共同组成步进电机的驱动电路,结合软件控制电机的转向和转速。
基于可靠的硬件设计和稳定精确的软件算法,实现了物体在斜板上作圆周运动、定点运动和画板上标出的任意曲线运动。
LCD320240作为液晶显示界面容量大,显示内容丰富,通过与键盘结合设置坐标点和选择运动方式,并能直观显示画笔所在的位置,具有良好的人机交互功能。
系统增加了由AT89C51控制的无线数据传输功能实现了对系统的远程控制,并采用双口RAM IDT7132将主控制CPU AT89C55和AT89C51进行隔离,保证数据传输的稳定性和可靠性。
关键词:步进电机,红外检测,双口RAMAbstract: In this design, microcomputer AT89C55 was applied as the control center. Four reflecting-infrared sensors were used to detect black lines and to keep the object moving along the black line. Stepping motors’s turning and rotating speed were controlled by the drive circuit, which are constituted by GAL16V8 and L298. Based on the reliable hardware design and the precise software algorithm, the object has successfully fulfilled circular movements, movements on a certain point and arbitrary curvy movements shown on the board. In order to make the design more intelligent, LCD320240 was employed as display interface, indicating the location of the painting brush intuitionistically. By combining the keyboard and DS1302 LCD, this design has also achieved coordinate points setting and movement manner selecting. The additional function of radio data transmission which is controlled by AT89C51,made available the long-distance control of the system. CPU AT89C55 and AT89C51 are separated by IDT7132 to ensure data stability and security.Key word: stepping motor, reflecting-infrared sensors, dual-port RAM目录1.系统方案论证与比较 (4)1.1 设计思路 (4)1.2 方案选择与论证 (4)1.2.1 总体方案选择与论证 (4)1.2.2 各模块方案选择与论证 (5)1.2.2.1 控制器选择与论证 (5)1.2.2.2 电机驱动方案的选择与论证 (5)1.2.2.3黑线检测方案的选择与论证 (6)1.2.2.4 键盘方案的选择与论证 (6)1.2.2.5 显示方案的选择和论证 (7)1.2.2.6无线数据传输方案的选择与论证 (7)1.3系统各模块的最终方案 (7)2. 系统的硬件设计与实现 (8)2.1系统硬件的基本组成部分 (8)2.2 主要单元电路的设计 (8)2.2.1 单片机控制电路 (8)2.2.2 电机驱动电路 (9)2.2.3 黑线检测电路 (10)2.2.4 键盘/显示电路 (11)2.2.5 无线发射接收电路 (12)2.2.6 自制电源电路 (13)3. 系统的理论分析与计算 (14)3.1物体到达设定坐标点过程的理论分析与计算 (14)3.2 圆周运动理论分析与计算 (15)3.3 黑线检测理论分析 (17)4. 系统的软件设计 (18)4.1系统主程序流程图 (18)4.2 键盘子程序 (20)4.3 指定坐标运动子程序 (20)4.4黑线检测子程序 (20)5. 系统测试与分析 (22)5.1 测试仪器 (22)5.2 测试方案、数据及结果分析 (23)5.2.1 自行设定运动测试 (23)5.2.2 圆周运动测试 (23)5.2.3 指定坐标运动测试 (24)5.2.4 黑线检测测试 (25)6. 结束语 (25)参考文献 (25)附录1:主要元器件清单 (26)附录2 系统原理图 (27)附录 3 系统使用说 (28)附录4 程序清单 (29)1.系统方案设计与比较1.1 设计思路题目要求设计一电机控制系统来控制物体在倾斜(仰角≤100°)的板上运动。
运动控制系统课程设计报告之欧阳索引创编
《运动控制系统》课程设计报告欧阳家百(2021.03.07)时间 2014.10_学院自动化 _专业班级自1103 _姓名曹俊博 __学号 41151093指导教师潘月斗 ___成绩 _______摘要本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。
并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。
关键词:双闭环;直流调速;无静差;仿真AbstractThis course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed2021.02.02loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation.Key Words:double closed loop;DC speed control system;without the static poor;simulation欧阳索引创编2021.02.02目录摘要0Abstract0引言11 实验内容12实验设备13 实验设计原理13.1 V-M系统原理13.2 三相桥式整流电路23.3 保护电路部分23.4 直流电源电路43.5 VT触发电路53.6 ASR控制电路53.7 ACR控制电路73.7 电流检测电路83.7 转速检测电路84 系统工作原理95 调节器参数的计算过程105.1 参数以及设计要求105.2 相关参数计算115.3 电流环设计115.4 转速环设计146 Matlab仿真186.1 启动过程仿真18欧阳索引创编2021.02.027心得体会 (19)参考文献21附录221 主电路原理图222 仿真模型图223启动波形图23欧阳索引创编2021.02.02引言《运动控制系统》课程设计需综合运用所学知识针对一个较为具体的控制对象或过程进行系统设计、硬件选型。
第七届(2005)悬挂运动控制系统(E题)
第七届(2005年)全国大学生电子设计竞赛作品悬挂运动控制系统(E题)毕业设计(论文)原创摘要:悬挂轨迹控制系统是一电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S51单片机作为核心器件实现对物体运动轨迹的自动控制,通过多圈电位器实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。
以达到对物体的控制和对坐标点的准确定位。
采用脉冲宽度调制技术控制直流电机驱动芯片L298,以实现对电机的转速、转向、启停等多种工作状态进行快速而准确的控制。
采用红外光电传感器实现检测电机速度和画板上黑色曲线轨迹。
关键词:运动轨迹;多圈电位器;脉冲宽度调制;红外反射光电传感;直流电机驱动ABSTRACT:Hang trajectory control system is a motor control system, object make linear, circle, searching locus and etc locomotion within the range of the 80cm×100cm, while movement system can display the coordinate of the object. Adopt AT89S51 MCU as the main part to realize the automatic control of the object motion locus in this design, system using multiturn potentiometer to measure the position of object, and introduces local closed-loop feedback control system link to correct error, in that case system can improve the accuracy of control and orientation. In this design system also adopt PWM technique control DC motor drive chip L298 to realize the accurate control of motor rotation speed, rotation direction, Start, Stop and etc operating position. System adopt infrared photosensor measure motor rotation speed and drawing locus by black curve on the palette.KEY WORDS:sport trajectory;loopy potentiometer;PWM;infrared photosensor;DC motor driving第1章引言运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。
悬挂运动控制系统报告
悬挂运动控制系统摘要: 本系统采用 MSP430F149 为主控芯片,通过液晶屏和键盘与操作人交互,通过步 进电机对悬挂载荷进行开环运动控制, 使用安装于悬挂载荷的反射式红外光电传 感器提供的反馈对面板上给定曲线进行闭环跟踪。
关键字: MSP430 单片机 步进电机 红外传感器This system is consisted by the controlling core of MSP430 MCU, the human interface of a LCD and a keyboard, two step motors for open-loop controlling of the suspended load and a matrix of reflected infrared optic-electronic sensors for feedback of the close-loop tracing to the given curve. Keywords: MSP430 MCU step motor infrared optic-electronic sensor一、方案论证: 根据题目要求,系统主要实现的功能是自由运动、定点运动、圆周运动和循 迹运动,通过手动设置参数,并能在运动的过程中实时显示坐标,关键在于电机 的精确控制。
系统的方案框图如图 1 所示:键盘模块 显示模块1、控制器模块方案 方案一:采用通俗的 51 单片机,运用比较广泛,有良好的知识作为基础,上手 方案一业专器仪与术技控测 学大技科子电安西 颖铭郑 龙云卢 伟大张 坤艳李:者作 建赵 :师老导指Abstract循迹模块电源模块控制器 模块电机 模块图案方统系 1 图很快。
但是 本系统的程序量较大,需要的 I\O 口资源较多,51 单片机 难 以胜任。
方案二: 方案二 系统采用 TI 公司所生产的 MSP430F149 单片机为主控制芯片,有非常丰 富的资源: 6 个 8 位并行口其中两个有中断功能,12 位的 ADC,强大的定时器, 精密的比较器,大容量的 RAM 和 ROM,存储大容量的程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬挂运动控制系统(E题)设计报告欧阳家百(2021.03.07)摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。
关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器一、设计要求1、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
2、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
3、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
451、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定的时间,该项目不得分;3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试时自带。
二、方案论证与选择1.核心控制模块的选择方案一:FPGA/CPLD方式。
即用FPGA/CPLD完成键盘定义与识别、电机工作状态选择与切换、液晶电路的驱动与控制等功能。
这种方案的优点在于系统结构紧凑、操作方便,而且可以使用的I/O口线很多;缺点是调试时需要接很多接线,过程繁琐,而且使用CPLD时,由于其内部没有ROM,对功能的实现有所限制。
方案二:单片机方式。
即由单片机、电机驱动电路及电机等组成系统。
使用单片机也可以完成键盘定义与识别、电机工作状选择与切换等功能,组成的系统规模较小,有一定灵活性,而且可以使用我们比较熟悉的单片机最小系统电路板,减少了工作量。
该控制方式需要单片机具有较大的程序存储量,所以可选择存储量为8K的AT89S52单片机。
基于以上分析,拟选用方案二。
2.电机及其驱动模块的选择电机驱动模块是本系统的执行机构,用于控制悬挂物体的运动。
方案1:采用普通小型直流电机。
普通直流电机由于其自身结构的限制,控制精度很低,无法达到系统要求的指标,这里不予采用。
方案2:采用专用步进电机驱动器及与其配套的步进电机。
用这种方案的控制精度、效率和可靠性都很高。
根据精度要求选择方案二。
3.黑线探测模块方案一:采用多路阵列式光敏电阻组成的光电探测器。
因为光敏电阻探测到黑线时,黑线上方的电阻值发生变化,经过电压比较器比较将信号送给单片机处理,从而控制物体做相应的动作。
但由于光敏电阻对环境光的识别,容易受到外界环境光的影响。
,方案二:采用红外反射式探测,即用已调的红外线垂直射到板面,经反射后转换为电信号送入单片机处理。
由于使用的是红外线,不受外界自然光的影响,循迹效果好。
基于上面的讨论,选用了抗干扰能力强的方案二。
4.显示方案的选择方案一:采用LED数码管显示器。
LED 数码管亮度高,醒目,但是其电路复杂,显示信息量较小,且动态扫描需要占用大量单片机时间,无法做到实时显示。
方案二:采用汉字LCD液晶显示器。
LCD有明显的优点:微功耗、尺寸小,超薄轻巧、显示信息量大、字迹清晰、美观、视觉舒适。
本设计中采用1602字符型LCM。
1602字符型LCM克服了LED 数码管的缺点,具有显示容量大、占用单片机口线少、节省单片机时间、功耗低等优点,完全符合本系统要求。
5.位置传感模块位置传感模块用于实现"显示画笔位置"的功能。
对于这个模块可以有硬件和软件两类解决方案。
方案1:在物体上安装水平和垂直方向的两只激光笔,在板边缘每条坐标线旁边安装一光电传感器,物体坐标所在处的传感器接收到激光笔,即可确定物体位置。
可见本方案共需要180个光电传感器,造成此方案几乎不可实现。
方案2:采用软件的方法确定物体位置。
单片机控制物体从某个已知的坐标位置出发,并且记录步进电机的每一次移动情况,就可以通过一定的算法计算出物体的位置。
这种方案没有位置传感器,精度较低,但是系统简单。
避免了硬件方案过于复杂的缺点。
本设计使用方案2。
6.键盘模块本模块采用即插型按键,接在最小系统的P2.0—P2.7,采用了4×4的16点阵键盘。
可以键入1—9的数字,即可以输入点的坐标值(X,Y),以及清除,确定,等功能按键。
三、系统具体设计实现1、硬件电路的设计(1)系统的总体设计方案如图3-1所示采用AT89S52单片机作为运动物体的控制中心,进行数学计算、对光电传感器送来的信号进行处理来控制运动物体的运行方向、计算运行物体的坐标位置、LCD数据显示、键盘控制等。
图3-1系统方框图(2)黑线检测模块电路黑线检测模块电路图3-2所示。
当红外线反射式光电传感器ST178位于黑线之上时,光电开关输出高电平;反之,输出低电平。
光电传感器输出电平后接反相器74LS04以稳定电平和增大驱动能力。
本设计采用8个红外传感器实现对黑线的检测,通过并口转串口芯片74LS165将数据串行传送到单片机。
图3-2 黑线检测模块电路(3)键盘电路本设计采用4x4矩阵键盘实现数字的输入和功能的选择,键盘接到AT89S52单片机的P2口,通过单片机对键盘的行列扫描实现按键的识别。
键盘电路如图3-3所示:图3-3 4x4键盘电路对应的按键码如下:7 8 9 /4 5 6 /1 2 3 /清除0 确认/(4)单片机电源电路单片机控制电路、红外传感器模块电路和液晶显示模块均采用+5V供电,采用集成稳压芯片7805来实现,电路图如图3-4所示。
图3-4单片机电源电路(5)步进电机驱动电路本设计采用57BYG007-4型步进电机和专用高细分步进电机驱动器SM-60作为动力装置。
57BYG007-4型步进电机为四相混合式步进电机,由于实验室现有电机驱动器为两相的,固步进电机作两相使用,步距脚为1.8度,通过步进电机驱动器SM-60细分实现步距脚0.9度。
电机驱动器SM-60接口如下:☆GND端为外接直流电源,直流电压为12v☆ A+,A-端为电机A 相,B+,B-端为电机B相。
☆ +COM端为光电隔离电源公共端,接单片机供电电源为+5V,☆ CP端为脉冲信号,下降沿有效。
☆ DIR端为方向控制信号,电平高低决定电机运行方向。
☆ FREE端为驱动器使能,高电平或悬空电机可运行。
低电平驱动器无电流输出,电机处于自由状态。
2、软件及算法设计(1)物体位置的计算图 3-5 物体位置示意图坐标点参数的计算将画笔所在的位置设定为整个物体的位置。
如图3-5设定物体位置的初值坐标为(X,Y)L1=L2=设电机A 的步进为a cm, 电机B的步进为b cm,物体高度为h cm。
如图8为物体在画板某一位置,则有:解得X轴点位置和h为则Y轴点位置Y=115-h控制物体从一点到另一点的实现就是当X、Y已知条件,求电机的步进过程。
由图8 解得:解得(cm)(cm)由此,利用软件实现以上算法来分别控制两个步进电机的步进a,b,这样就可以向控制系统输入起点坐标和终点坐标让物体在画板置任意行走。
(2)直线算法:目前画直线的算法也算是有很多,比如:逐点比较直线插补,脉冲增量插补和数据采集插补,本设计根据实际所学知识,选择了逐点比较直线插补法,具体如下:逐点比较法的基本原理是,在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向,使刀具向减小偏差的方向进给。
图3-6 第一象限直线如图3-6所示,设直线的起点为坐标原点,终点坐标为A (e x ,e y ),点m (m x ,m y )为加工点(动点)。
定义偏差公式为 m m e m e F y x x y =-。
若m F =0,表明点m 在OA 直线段上;若m F >0,表明点m 在OA 直线段上方,即点m ’ 处;若m F <0, 表明点m 在OA 直线段下方,即点m ’’处。
由此可得第一象限直线逐点比较法插补的原理是:从直线的起点出发,当m F ≥0时,沿+x 轴方向走一步;当m F <0时,沿+y 轴方向走一步;当两方向所走的步数与终点坐标(e x ,e y )相等时,发出终点到信号,停止插补。
可以将上面所定义的偏差公式进一步简化,推导出偏差的递推公式。
① 当m F ≥0时,沿+x 轴方向进给一步,111(1)m m e m e m e m e m eF y x x y y x x y F y +++=-=-+=-(1)②当m F <0时,沿+y 轴方向进给一步, 111(1)m m e m e m e m e m eF y x x y y x x y F x +++=-=+-=+(2)式(1)和式(2)是简化后偏差的计算公式,在公式中只有一次加法或减法运算,新加工点的偏差都可由前一点偏差和终点坐标相加或相减得到。
本体设计中采用以上原理,不过对于非原点开始的直线,采用起点坐标归零思想,结果也证明了改思路的可行性。
(3)画圆算法:画圆算法采用圆弧插补法。
圆弧插补法也是在绘图系统中常用的一种方法,它和直线插补法原理相同,也是逐点比较算法。
若 F=0,表明加工点在圆弧上;F >0,表明加工点在圆弧外;F <0,表明加工点在圆弧内。
若 F≥0,为逼近圆弧,下一步向-X 轴进给一步,并计算出新的偏差值;F <0,为逼近圆弧,下一步向+Y 轴进给一步,并计算出新的偏差值。