悬挂运动控制系统论文
悬挂运动控制系统设计

悬挂运动控制系统(E题)摘要本系统在嵌入式操作系统基础上,使用两块单片机协调工作,对悬挂物体的运动进行实时控制。
系统通过两个步进电机的配合完成了平面任意曲线运动,通过光电传感器配合循迹算法迅速有效地完成了循迹运动。
运动的精度为毫米级,过渡时间不超过1分钟。
同时,使用了点阵式LCD配合PS/2鼠标等外围设备,提供了良好的交互界面。
AbstractThis design bases on an embedded operating system, and uses two pieces of SCM to take real time control of a suspender’s movement in a planar plane. The system can move in any designed way with the cooperation of two step-motors, and do a quick tracing movement because of a special arithmetic, which is based on an array of photoelect ric sensors. The position’s precision of the movement can achieve a level of millimeter, and its transition time is less than 1 minute. Meanwhile, with a LCD and a mouse which follows PS/2 protocol and other input/output devices, it can provide a friendly and humanistic man-machine conversation.一、方案论证与比较从控制系统的角度来看,采用闭环控制方式比采用开环控制的效果要好。
汽车悬挂系统的主动控制研究

汽车悬挂系统的主动控制研究汽车悬挂系统是汽车重要的组成部分,它直接影响到汽车的操控性、舒适性和安全性。
随着科技的不断进步,汽车悬挂系统也在不断进行着创新与改良。
主动悬挂系统是其中的重要发展方向之一,通过主动控制技术,可以实现对悬挂系统的实时调控,从而提高汽车的操控性和舒适性。
本文将对汽车悬挂系统的主动控制进行研究,探讨其在汽车领域的应用和发展前景。
一、汽车悬挂系统的发展历程汽车悬挂系统起源于汽车的发明,最初的悬挂系统是由弹簧和减震器组成。
随着汽车的发展,悬挂系统也逐渐演变出了不同的类型,包括独立悬挂、双横臂悬挂、麦弗逊悬挂等。
这些悬挂系统在一定程度上提高了汽车的操控性和舒适性,但是仍然存在一些局限性,比如在不同路况下的表现不一致、无法实现动态调节等。
为了克服传统悬挂系统的局限性,人们开始研究主动悬挂系统。
主动悬挂系统采用了传感器、执行器和控制算法等先进技术,可以根据路况和驾驶需求实时调整汽车的悬挂硬度、高度和角度,从而提高了汽车的操控性和舒适性。
二、主动悬挂系统的原理和关键技术主动悬挂系统的核心是实时控制,其原理是通过传感器感知汽车的运动状态和路况,然后通过控制算法计算出最佳的悬挂参数,并通过执行器实时调整悬挂系统。
主动悬挂系统的关键技术主要包括以下几个方面:1. 传感器技术:包括汽车姿态传感器、路况传感器和悬挂位移传感器等,用于实时获取汽车的运动状态和路况信息。
2. 控制算法:包括模糊控制、神经网络控制和模型预测控制等,用于根据传感器获取的数据计算出最佳的悬挂参数。
3. 执行器技术:包括电磁阀、液压阀和电机等,用于实现对悬挂系统的实时调节。
通过以上关键技术的应用,主动悬挂系统可以实现对悬挂系统的精准控制,从而提高汽车的操控性和舒适性。
未来,随着技术的不断革新,主动悬挂系统将会迎来更大的发展。
一方面,随着汽车电子技术和传感器技术的日益成熟,主动悬挂系统的实时性和精准度将会得到进一步提高。
随着人工智能和大数据技术的不断发展,控制算法也将会变得更加智能化和自适应,从而更好地满足不同路况和驾驶需求。
汽车悬挂系统的主动控制研究
汽车悬挂系统的主动控制研究【摘要】汽车悬挂系统是车辆行驶中至关重要的部件,对车辆的舒适性、稳定性和安全性起着至关重要的作用。
随着科技的发展,主动悬挂系统已经逐渐成为汽车悬挂系统的发展趋势。
本文围绕汽车悬挂系统的主动控制展开研究,介绍了汽车悬挂系统的作用以及分类,详细阐述了主动悬挂系统的原理和主动控制技术在汽车悬挂系统中的应用。
分析了目前汽车悬挂系统主动控制研究的现状,展望了未来的发展方向,并总结了研究的局限性。
通过本文的研究,可以更好地了解主动悬挂系统在汽车工程中的重要性,促进汽车悬挂系统的技术创新和发展。
【关键词】汽车悬挂系统,主动控制,研究背景,研究意义,研究目的,作用,分类,原理,技术应用,现状,展望,总结,建议,局限性1. 引言1.1 研究背景汽车悬挂系统作为汽车重要的减震和支撑装置,在汽车性能和乘坐舒适性方面起着至关重要的作用。
随着科技的不断进步和人们对驾驶舒适性和安全性的需求不断提高,传统的悬挂系统已经不能满足人们的需求。
为了解决这一问题,研究人员开始关注汽车悬挂系统的主动控制技术。
汽车悬挂系统的主动控制是指通过控制系统自动调节悬挂系统的工作状态,使其适应不同路况和行驶状态,提高汽车的稳定性、操控性和乘坐舒适性。
在汽车行驶过程中,通过主动控制技术可以实现悬挂系统的实时调节,提高车辆的通过性和抓地力,降低车身的俯仰和横摆幅度,从而提升行驶平稳性和安全性。
汽车悬挂系统的主动控制研究已经取得了一些成果,但仍然存在许多挑战和待解决的问题。
对汽车悬挂系统的主动控制研究具有重要的实用意义,为提高汽车性能和乘坐舒适性提供了新的思路和方法。
本文将详细探讨汽车悬挂系统的主动控制技术,分析其应用现状和存在的问题,并展望未来的研究方向。
1.2 研究意义汽车悬挂系统的主动控制研究具有重要的意义。
随着现代社会的发展,人们对汽车行驶安全性、舒适性和稳定性的需求不断增加,而悬挂系统作为汽车重要的动力传递、支撑和减震装置,在保证汽车正常行驶中起着至关重要的作用。
《2024年基于智能控制的汽车主动悬架控制策略研究》范文
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,汽车主动悬架系统已经成为现代汽车安全与舒适性的重要组成部分。
通过采用先进的控制策略,主动悬架系统可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
本文将重点研究基于智能控制的汽车主动悬架控制策略,旨在为汽车悬架系统的优化设计提供理论依据和技术支持。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,通过传感器实时监测路面状况和车辆运动状态,采用先进的控制算法对悬架进行实时调整,以实现最佳的行驶性能。
与传统的被动悬架系统相比,主动悬架系统具有更高的灵活性和适应性。
三、智能控制在汽车主动悬架系统中的应用智能控制技术在汽车主动悬架系统中发挥着重要作用。
通过采用先进的控制算法和传感器技术,实现对车辆运动状态的实时监测和调整。
常见的智能控制策略包括模糊控制、神经网络控制、遗传算法等。
这些控制策略可以根据不同的道路条件和驾驶需求,对悬架系统进行实时调整,以实现最佳的行驶性能。
四、基于智能控制的汽车主动悬架控制策略研究(一)控制策略设计本文提出一种基于模糊控制的汽车主动悬架控制策略。
该策略通过建立模糊控制器,实现对车辆运动状态的实时监测和调整。
模糊控制器采用输入输出映射的方法,将传感器采集的信号进行模糊化处理,然后根据预设的规则进行决策,最后输出控制信号对悬架系统进行调整。
(二)仿真分析为了验证所提出的控制策略的有效性,本文采用仿真分析的方法。
通过建立车辆动力学模型和主动悬架系统模型,对所提出的控制策略进行仿真测试。
仿真结果表明,该控制策略可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
五、实验验证与结果分析为了进一步验证所提出的控制策略的实用性,本文进行了实验验证。
通过在实车上进行实验测试,对比传统被动悬架系统和所提出的主动悬架控制策略在不同道路条件下的性能表现。
实验结果表明,所提出的基于智能控制的汽车主动悬架控制策略在提高车辆行驶稳定性、乘坐舒适性以及操控性能方面具有显著优势。
悬挂运动控制系统(上)

悬挂运动控制系统(上)摘要悬挂运动是一种现代化的运动方式,已被广泛应用于体育赛事和健身领域中。
悬挂运动的优点在于能够全面锻炼身体,提高协调性和柔韧性。
然而,悬挂运动的高度要求和复杂性也提出了对其运动控制的要求。
本文提出一种悬挂运动控制系统,包括传感器、运算器和执行器等部件,能够准确控制悬挂运动的高度和姿态,保证安全性和有效性,并且该系统可以轻松地添加或减少悬挂绳索以适应各种不同的悬挂运动。
关键词:悬挂运动,控制系统,高度姿态,安全有效性,灵活性。
正文1. 介绍悬挂运动是一种现代化的运动方式,它被广泛应用于体育赛事和健身领域中。
悬挂运动的优点在于能够全面锻炼身体,提高协调性和柔韧性。
然而,悬挂运动的高度要求和复杂性也提出了对其运动控制的要求。
2. 系统组成本文提出的悬挂运动控制系统由传感器、运算器和执行器等几个部件组成。
其中,传感器用于检测悬挂绳索的高度和姿态,运算器用于处理传感器数据并指导执行器调整悬挂绳索的高度和姿态。
3. 运行原理在悬挂运动期间,传感器通过检测绳索的弯曲程度和角度以及重量变化等数据,将这些数据传递给运算器。
运算器根据传感器数据计算出制动力和调整绳索姿态所需的参数,并将命令发送给执行器。
执行器调整绳索的高度和姿态,一旦悬挂高度或姿态超过设定范围,运算器会通过控制信号发出警报或制动,确保安全性。
执行器可以以较大的精度控制悬挂高度和姿态,使悬挂运动变得更加灵活和精确。
4. 系统特点本文提出的悬挂运动控制系统具有以下几个特点:(1)准确控制悬挂运动的高度和姿态,保证安全性和有效性。
(2)可适应不同的悬挂运动,可以轻松地添加或减少悬挂绳索以适应不同的运动。
(3)高精度的执行器能够提供精准的悬挂调节,使悬挂运动变得更加灵活和精确。
5. 结论本文提出的悬挂运动控制系统为悬挂运动提供了高精度、安全、可靠的控制手段。
通过控制悬挂运动的高度和姿态,可以保证悬挂运动的安全和有效性,使其在体育赛事和健身领域发挥更大的作用,具有广阔的应用前景。
05年电子设计大赛题论文——悬挂控制系统
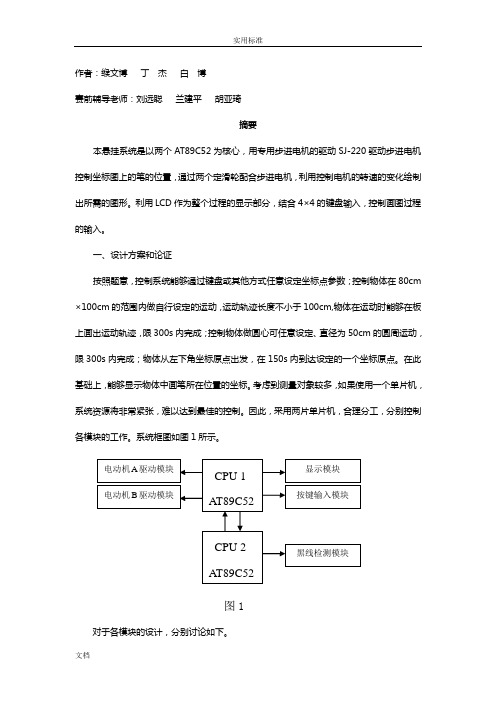
作者:缑文博丁杰白博赛前辅导老师:刘远聪兰建平胡亚琦摘要本悬挂系统是以两个AT89C52为核心,用专用步进电机的驱动SJ-220驱动步进电机控制坐标图上的笔的位置,通过两个定滑轮配合步进电机,利用控制电机的转速的变化绘制出所需的图形。
利用LCD作为整个过程的显示部分,结合4×4的键盘输入,控制画图过程的输入。
一、设计方案和论证按照题意,控制系统能够通过键盘或其他方式任意设定坐标点参数;控制物体在80cm ×100cm的范围内做自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300s内完成;控制物体做圆心可任意设定、直径为50cm的圆周运动,限300s内完成;物体从左下角坐标原点出发,在150s内到达设定的一个坐标原点。
在此基础上,能够显示物体中画笔所在位置的坐标。
考虑到测量对象较多,如果使用一个单片机,系统资源将非常紧张,难以达到最佳的控制。
因此,采用两片单片机,合理分工,分别控制各模块的工作。
系统框图如图1所示。
对于各模块的设计,分别讨论如下。
1.电动机及其的选择(1)电动机的选择方案一:使用步进电机。
其优点在于速度易于控制,可以实现快速启停,且转动角度严格可控。
可以根据驱动脉冲电流的次数计算小车的行驶距离,省去距离测量这一环节。
步进电机的功率大,速度可调,转速稳定,可以达到精密控制。
方案二:使用直流电机,用脉冲宽度调节方法,对电机进行控制。
但此方案的缺点也很明显,直流电机动起来惯性大,转速不易控制,很难达到精确地控制,误差较大。
因此,选择方案一。
(2)电动机驱动模块所用电动机是四相电动机,需要放大4路驱动信号。
方案一:采用4路三极管放大电路驱动,该方案电路复杂,可靠性难以保证。
方案二:采用专用的步进电机驱动SJ—220, SJ-220驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,带动2A以下所有的42BYG、57BYG、系列步进电机。
基于单片机的悬挂运动控制系统毕业设计(论文)
毕业设计论文基于单片机的悬挂运动控制系统毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
汽车悬挂系统的主动控制研究
汽车悬挂系统的主动控制研究汽车悬挂系统是车辆重要的组成部分,它直接影响着车辆的稳定性和行驶舒适性。
传统的汽车悬挂系统是被动的,只能根据路面的情况进行减震和缓冲,无法主动地对路况进行调整。
随着科技的不断发展,主动控制的悬挂系统逐渐成为汽车制造商和消费者关注的焦点。
本文将深入探讨汽车悬挂系统的主动控制研究,包括其原理、优势和应用前景等方面。
一、主动控制悬挂系统的原理主动控制悬挂系统的原理是利用传感器和控制器来感知车辆的运动状态和路面情况,然后通过执行器主动地调整悬挂系统的工作状态,以达到提高车辆行驶稳定性和乘坐舒适性的目的。
它可以根据车辆所处的环境和路况实时地调整悬挂系统的刚度、高度和减震力等参数,从而使车辆在各种路况下都能保持平稳的行驶和乘坐舒适。
主动控制悬挂系统通常包括传感器、控制器和执行器三个部分。
传感器用于感知车辆的运动状态和路面情况,如加速度传感器、车速传感器、悬挂位移传感器等;控制器则根据传感器采集到的数据进行实时计算和分析,并通过执行器来调整悬挂系统的工作状态。
相较于传统的被动悬挂系统,主动控制悬挂系统具有以下几点优势:1. 提高行驶稳定性。
主动控制悬挂系统可以根据车辆的运动状态和路面情况实时地调整悬挂系统的工作状态,从而有效地减轻车辆在转弯、加速和减速时的侧倾和纵向俯仰,提高行驶稳定性。
4. 能够适应不同的驾驶模式。
主动控制悬挂系统可以根据不同的驾驶模式进行调整,如舒适、普通和运动模式,满足不同驾驶者的需求。
5. 增强安全性能。
主动控制悬挂系统可以提供更加灵活的悬挂调整,从而提高车辆在紧急情况下的安全性能。
随着汽车科技的不断发展,主动控制悬挂系统在未来有着广阔的应用前景。
目前,主动控制悬挂系统已经在一些高端车型上开始大规模应用,并且随着成本的不断下降,预计将会逐渐普及到中低端车型中。
在未来,随着自动驾驶技术的发展,主动控制悬挂系统还可以与车辆的自动驾驶系统相结合,实现更加智能化的车辆控制。
2005年 悬挂运动控制系统
悬挂运动控制系统(E题)毕业设计(论文)原创摘要:悬挂轨迹控制系统是一电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S51单片机作为核心器件实现对物体运动轨迹的自动控制,通过多圈电位器实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。
以达到对物体的控制和对坐标点的准确定位。
采用脉冲宽度调制技术控制直流电机驱动芯片L298,以实现对电机的转速、转向、启停等多种工作状态进行快速而准确的控制。
采用红外光电传感器实现检测电机速度和画板上黑色曲线轨迹。
关键词:运动轨迹;多圈电位器;脉冲宽度调制;红外反射光电传感;直流电机驱动ABSTRACT:Hang trajectory control system is a motor control system, object make linear, circle, searching locus and etc locomotion within the range of the 80cm×100cm, while movement system can display the coordinate of the object. Adopt AT89S51 MCU as the main part to realize the automatic control of the object motion locus in this design, system using multiturn potentiometer to measure the position of object, and introduces local closed-loop feedback control system link to correct error, in that case system can improve the accuracy of control and orientation. In this design system also adopt PWM technique control DC motor drive chip L298 to realize the accurate control of motor rotation speed, rotation direction, Start, Stop and etc operating position. System adopt infrared photosensor measure motor rotation speed and drawing locus by black curve on the palette.KEY WORDS:sport trajectory;loopy potentiometer;PWM;infrared photosensor;DC motor driving第1章引言运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。
基于单片机控制的悬挂运动系统
基于单片机控制的悬挂运动系统
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
李红萍 兰州石化职业技术学院
电气时代 ELECTRIC AGE 2006(7)
本文链接:/Periodical_dqsd200607012.aspx
道奇与瑞恩电气韭务总部设在南卡罗巢纳卅的格 林维尔,罗克书尔自动化动力系统的几乎全部收入都 来源于这两个品牌。根据预测,道奇和瑞恩将在2006 财年获得10亿美元收入,取得部门营业利润率15% 的好成绩。
罗克书尔自动化公司总裁兼首席执行官基斯·诺 斯布什(Keith D Nosbusch)先生表示:“动力系统分部 实力雄厚,拥有杰出的管理团队和先进的行业技术, 处于市场领先地位。在罗尔书尔自动化公司发展壮
相关文章 基于单片机控制的运动控制系统
——《电气时代》2005年第8期
2006年7月4日,罗克书零鸯动纯公司今天宣布 了出售公司旗下的道奇机械动力传输及瑞恩(Rlehance Elec扛ic)电机和电机维修.服务业务的计划。道奇和瑞恳 是机械动力传输产品及工业电机领域的著名生产商, 经营着罗克书尔自动化公司动力系统报告单元的主营 业务。公司将保留瑞恩电气、瑞恩驱动及其相关部件 与服务业务,作为罗克书尔自动化全球驱动与客服业 务的有机组成部分。
||红矮捡溅感跷j }电动戳控制系统l{c: }电动机控制系鲩2
誊i。鬻}{;j
c刊黻 >
豢 ====纠 豢 ====刮
液精显示 语音模块
图3系统框图
●
万50方数I电据号眄代2006年第7期
【运动控制专辑】
89c52协调电动机控制系统1、电动机控制系统2按要求 动作,以控制物体在绘图纸上绘出理想的图形,键盘显示、语 音模块主要用于设定物体的坐标,播报和显示物体的坐标, 红外检测电路主要用于检测任意给定的运动路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬挂运动控制系统【摘要】本系统采用凌阳16位单片机SPCE061A作为控制中心,由直流步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。
该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。
【关键词】SPCE061A单片机中文液晶显示屏逼近画圆算法A Control System For Suspension Movement[Abstract]This design uses SPCE061A as the control core to build a suspension movement control system which consists of a DC step motor, infrared emitting tube, 4X4 keyboard and an LCD display screen for Chinese characters. The system can control the suspended objects to complete the movements set by itself, such as drawing the circles, moving along the black lines and doing other movements. It also can display the correct location of the coordinate where the object reaches.Key words: SPCE061A Single chip, Chinese characters LCD, Closing Algorithm for circle drawing一、方案的选择与论证1、单片机选择方案一:采用传统的8位89C51单片机作为运动物体的控制中心。
51 单片机具有价格低廉,使用简单等特点,但其运算速度低,功能单一,RAM、ROM空间小等缺点。
本题目在确定圆周坐标值时,需要进行大量的浮点数运算,若采用89C51需要做RAM,ROM来扩展其内存空间,其硬件工作量必然大大增多。
方案二:采用16位单片机SPCE061A作为运动物体的控制中心。
SPCE061A具有丰富的资源:RAM,ROM空间大、指令周期短、运算速度快、低功耗、低电压、可编程音频处理,易于编写和调试等优点。
尤其在复杂的数学运算,其运算速度快,精度高,在控制步进电机时运行速度比一般51单片机快。
基于上述分析,拟选择方案二。
2、电动机选择方案一:用步进电机实现物体的精确定位和方向控制。
步进电机是一种脉冲控制电机,它是一种能将脉冲信号转换为角位移的数模转换器,可广泛用于无需反馈控制但要求有精确位置的场合。
方案二:采用带旋转编码器控制直流电机,电机运转平稳,精度可以得到保证。
但其驱动电路复杂,在短时间内难与实现。
在本题中因考虑到控制画笔画图准确性和电路的复杂性,拟选择选用方案一,并采用控制性能高的步进电机来控制运动物体。
3、控制物体运动算法方案一:直线插补法。
直线插补法是在绘图系统中常用的一种逐点比较算法。
它的原理是:执行机构每走一步,都要和给定轨迹上的坐标值进行一次比较,看当前位置和轨迹位置的关系,从而确定下一步的进给方向。
如果当前位置在给定轨迹的下方,下一步向给定轨迹的上方走,反之则相反。
如果当前位置在给定轨迹的里面,下一步向给定轨迹的外面走,反之则相反。
这样走一步看一步,决定下一步走向,形成“逐点比较”, 使走线逼近给定轨迹。
方案二:直线简易算法。
这种算法是根据计算机图形学中直线的显示方法改变而来,基本原理也是“逐点比较”,执行机构根据当前位置和轨迹位置的关系,从而确定下一步的进给方向,但是数据的处理过程不同。
在直线插补法中,一次循环只能确定一个走向(X向或Y向),而在直线简易算法中,一次循环可以走两步,这样可以大大提高效率。
同时,直线插补法要考虑象限的问题,不同的象限有不同的计算公式,而直线简易算法绕开了象限的问题,可以节省很多代码。
结合软件编程的难易和上面的比较,拟选择选用方案二。
4、黑线探测模块方案一:采用红外反射式探测,即用已调的红外线垂直射到板面,经反射后转换为电信号送入单片机处理,这是一种很普遍的应用,但是它存在着缺点:(1)由于反射距离较短,红外反射功率小,如果板面的纸凹凸不平或白纸表面有杂物,也会使单片机误判。
(2)由于板面的黑线可能是墨水或者胶布,两种虽然都是黑色,但经实际应用发现其反光程度均不同,也会对红外传感器造成一定的干扰。
方案二:采用多路阵列式光敏电阻组成的光电探测器。
因为光敏电阻探测到黑线时,黑线上方的电阻值发生变化,经过电压比较器比较将信号送给单片机处理,从而控制物体做相应的动作。
光敏电阻对环境光的识别,要求考虑外界环境光的影响,测试时可能在室内或室外,为了消除外界光照强度的干扰,在每个光敏电阻旁边加了一个高亮度发光二极管,这样每个光敏电阻的环境一样,即使在黑暗的条件下也可以正常工作。
测试结果表明使用这种方法就可以消除外界光的干扰。
基于上面的讨论,选用了抗干扰能力强的方案二。
5、显示方案方案一:采用LED数码管显示器。
LED 数码管亮度高,醒目,但是其电路复杂,占用资源较多,显示信息量较小。
方案二:采用汉字LCD液晶显示器。
LCD有明显的优点:微功耗、尺寸小,超薄轻巧、显示信息量大、字迹清晰、美观、视觉舒适;可以用中文LCD液晶进行菜单显示,使整个控制系统更加人性化。
基于上面的比较分析和现有的LCD器件,拟选用方案二。
二、系统的具体设计与实现1、系统的总体设计方案如图1所示采用凌阳16位SPCE061A单片机作为运动物体的控制中心,进行数学计算、对光电传感器送来的信号进行处理来控制运动物体的运行方向、计算运行物体的坐标位置、LCD数据显示、键盘控制等。
图 1 系统原理图2、系统硬件设计与计算(1)电机驱动电路的设计与实现图 2 电机驱动电路具体电路如图2,该电路采用L298驱动芯片,L298驱动芯片是性能优越的小型直流电机驱动芯片之一。
它可被用来驱动两个直流电机或者是一个步进电机。
在4——46V的电压下,可以提供2A的驱动电流。
L298还有过热自动关断功能,并有反馈电流检测功能,符合电机驱动的需要。
由于采用的是步进电机,所以对电机的驱动必须是采用脉冲控制。
本作品中的控制系统采用5V电源,电机驱动L298的电源也使用5V。
基于稳定性考虑,我们运用了TLP521光耦集成块,将主控制部分电源与电机驱动部分的电源隔离开来,这样减少电机对主控制电路的干扰。
(2)黑线探测设计与实现利用该模块探测板面黑线的原理是:光线照射到板面并反射,由于黑线和白纸的反射系数不同,黑线上方的电阻值发生变化,经过电压比器比较将信号送给单片机处理。
电路示意图如图3:21,3为光敏电阻黑色引导线 2,4为光敏电阻图3 黑线探测示意图本电路(如图3)利用光敏电阻在不同的光照的条件下电阻变化的原理。
根据第几路的光敏检测到黑线来控制步进电机的转向。
将光敏电阻分为前、后、左和右四个方向,设计为‘+’字形。
采用一组两个探测头,当出现一个探测头的误判时,可以通过软件禁止物体跑出轨迹。
当探测头1检测到黑线时,物体左走,同时禁止物体右转防止跑出黑线,直到中间的探测头2或探测头4再次检测到黑线证明物体已经回到黑线上才向前走,这样就可以保证物体不会跑出黑线。
在试验时采用的电路如图4。
图4 黑线探测原理图由于在正常状态下每个光敏电阻感光量相同,通过调节电位器,使得电压比较器输出为零,当内侧(黑线两侧)的光敏电阻进入黑色引导带时,感光量大大改变,电压比较器翻转电压为高电平。
将电平变化送到单片机控制物体的调整方向。
用这种方法即使板面受到不同程度的光照射,比较器正向输入端和反向输入端的变化值相等,比较器输出端不变。
只有黑色引导线进入内侧一组光敏电阻区域才能引起感光量大大改变,比较器才翻转,这种方法抗干扰能力强。
(3)红外线无线控制台电路的设计采用红外线无线通信可以对运动物体进行远程控制并传输物体的坐标位置到远处的控制台显示。
发射电路如图5示,由NE555构成无稳多谐振荡器,其振荡频率由电阻W1、R1和C3决定,通过调节W1可以改变振荡频率,使输出频率为38KHz。
T作为单片机的串口输出端,当T为高电平时,T1截止,T2、T3没有振荡频率。
当T为低电平, T1导通,这样38KHz就可以对T出来的信号进行调制;调制后的信号经过T2、T3后级电流放大去控制红外线发射管。
红外线的接收电路直接采用彩色电视机的一体化接收头,达到预期效果。
图 5 红外无线控制台原理图(4)语音播放电路通过SPY0030功率放大器,驱动喇叭,完成对物体运行时间的语音播放(图6)图 6 语音播放电路(5)显示模块采用汉字液晶显示屏作为显示模块,同时使用4*4键盘操作,以菜单形式进行显示。
显示设定位置值、当前位置值。
三、系统软件设计及数学运算(1)系统主程序流程框图(图7)图7 主程序流程图(2)物体位置控制部分图8 物体位置示意图1、坐标点参数的计算将画笔所在的位置设定为整个物体的位置。
如图8设定物体位置的初值坐标为(X,Y )L1=L2=设电机A 的步进为a cm , 电机B 的步进为b cm ,物体高度为h cm 。
如图8为物体在画板某一位置,则有:222)1(L a h X +=+222)2()100(L b h X +=+-解得X 轴点位置和h 为15220]110)2()1[(222-++-+=L b L a X22)1(X a L h -+=则Y 轴点位置Y=115-h控制物体从一点到另一点的实现就是当X 、Y 已知条件,求电机的步进过程。
由图8 解得:222)1()115()15(a L Y X +=-++222)2()115()]15(110[b L Y X +=-++-解得1)115()15(22L Y X a --++=(cm )2)115()]15(110[22L Y X b --++-=(cm )由此,利用软件实现以上算法来分别控制两个步进电机的步进a ,b ,这样就可以向控制系统输入起点坐标和终点坐标让物体在画板置任意行走。
因此物体可以由自行设定的两点坐标走直线。
也可以将曲线分为多点坐标,采用直线逼近法走曲线。
2、多边形逼近画圆实现画圆算法一个正多边形,当其边数n 足够大,即每边所对的圆心角△θ足够小时,就非常接近一个圆。
这样,画圆的问题就变成画多边形、画直线的问题了,只要确定n 和θ角的大小,多边形顶点的坐标位置,就可以绕开烦琐的象限问题,直接利用上面的画线的简易算法来实现画圆。