第2 电阻式传感器 PPT课件
合集下载
电阻式传感器精品PPT课件

6. 理解应变式传感器的结构设计及应用
2
3
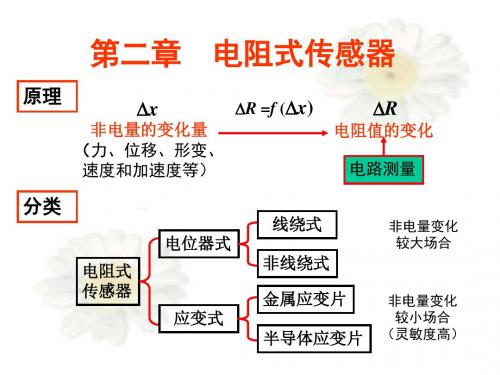
概述
电阻应变式传感器——利用电阻应变片将应变转换为电阻变
化的传感器。 主要用途——测量力、力矩、压力、加速度、重量等。
4
电阻应变式传感器的工作原理
将电阻应变片粘贴在弹性元件特 定表面上,当力、扭矩、速度、加速度 及流量等物理量作用于弹性元件时,会 导致元件应力和应变的变化,进而引起 电阻应变片电阻的变化。电阻的变化经 电路处理后以电信号的方式输出。
6
设有一段长为L,截面积为A,电阻率为ρ的导 体(如金属丝),它具有的电阻为
L
2r 2(r-dr)
F
F
R l
A
L+dL
ρ:电阻系数 l:金属导线长度 A:金属导线截面积
当它受到轴向力F而被拉伸(或压缩)时,其L、A和ρ
均发生变化。
7
R l
A
两边取对数:ln R ln L ln A ln
两边微分:dR d dA dl R Al
16
敏基粘感底结栅—剂——固— —定应 用敏变 粘感片 结栅中剂,最分并重别使要把敏的盖感部层和栅分敏与,感弹由栅性某固种 元结金 件于属 相基细 互底丝 绝;绕 缘在成 ; 栅应使形变用。计应应工变变作计计 时 时中 , ,实 基 用现底粘应起结变着剂把把-电试应阻件变转应计换变基的准底敏确 再感地 粘元传 贴件递 在。给 试敏敏 件感感 表栅栅 面 合的的金作被材用测料,部的为位选 此 ,择 基 因对 底 此所必粘制须结造很剂的薄也电,起阻一着应般传变为递计应0.0性 变2~能 的0的 作.04好 用m坏 。m起。着常决 定性的作用。
——为金属材料的泊松比
d/ —金属丝电阻率的相对变化量
代入
2
3
概述
电阻应变式传感器——利用电阻应变片将应变转换为电阻变
化的传感器。 主要用途——测量力、力矩、压力、加速度、重量等。
4
电阻应变式传感器的工作原理
将电阻应变片粘贴在弹性元件特 定表面上,当力、扭矩、速度、加速度 及流量等物理量作用于弹性元件时,会 导致元件应力和应变的变化,进而引起 电阻应变片电阻的变化。电阻的变化经 电路处理后以电信号的方式输出。
6
设有一段长为L,截面积为A,电阻率为ρ的导 体(如金属丝),它具有的电阻为
L
2r 2(r-dr)
F
F
R l
A
L+dL
ρ:电阻系数 l:金属导线长度 A:金属导线截面积
当它受到轴向力F而被拉伸(或压缩)时,其L、A和ρ
均发生变化。
7
R l
A
两边取对数:ln R ln L ln A ln
两边微分:dR d dA dl R Al
16
敏基粘感底结栅—剂——固— —定应 用敏变 粘感片 结栅中剂,最分并重别使要把敏的盖感部层和栅分敏与,感弹由栅性某固种 元结金 件于属 相基细 互底丝 绝;绕 缘在成 ; 栅应使形变用。计应应工变变作计计 时 时中 , ,实 基 用现底粘应起结变着剂把把-电试应阻件变转应计换变基的准底敏确 再感地 粘元传 贴件递 在。给 试敏敏 件感感 表栅栅 面 合的的金作被材用测料,部的为位选 此 ,择 基 因对 底 此所必粘制须结造很剂的薄也电,起阻一着应般传变为递计应0.0性 变2~能 的0的 作.04好 用m坏 。m起。着常决 定性的作用。
——为金属材料的泊松比
d/ —金属丝电阻率的相对变化量
代入
电阻式传感器教学课件

工作原理
通过测量电阻值的变化,可以得 知被测物理量的变化,从而实现 非电量到电量的转换。
电阻式传感器的分类
01
02
03
应变片式
利用导体材料的应变效应 ,将压力、应变等物理量 转换为电阻值变化。
热电阻式
利用导体或半导体的温度 效应,将温度变化转换为 电阻值变化。
电位计式
利用电位计的电刷在电阻 体上滑动,将位移或角位 移转换为电阻值变化。
稳定性与可靠性
稳定性
稳定性是指电阻式传感器在长时间使用或在不同条件下保持 其性能参数的能力。稳定性好的传感器能够提供更可靠、更 准确的测量结果。
可靠性
可靠性是指电阻式传感器在规定条件下和规定时间内完成规 定功能的能力。可靠性高的传感器具有更长的使用寿命和更 高的可靠性,能够保证测量的稳定性和准确性。
后续评估和改进。
06
电阻式传感器的发展趋势与展 望
Chapter
新材料、新工艺的应用
高分子电阻式传感器
01
利用高分子材料的导电性,具有灵敏度高、响应速度快、耐腐
蚀等特点。
纳米电阻式传感器
02
利用纳米材料的超小尺寸效应,实现传感器的高精度和高灵敏
度。
陶瓷电阻式传感器
03
利用陶瓷材料的稳定性和绝缘性,具有高温、高压、高频等优
良特性。
多功能、智能化的发展趋势
集成化
将多个传感器集成在一个芯片上,实现多参数、 多功能的测量。
智能化
通过微处理器和算法的应用,实现传感器的自校 准、自补偿和自诊断等功能。
网络化
通过物联网技术,实现传感器数据的远程传输和 实时监测。
在物联网、人工智能等领域的应用前景
物联网
通过测量电阻值的变化,可以得 知被测物理量的变化,从而实现 非电量到电量的转换。
电阻式传感器的分类
01
02
03
应变片式
利用导体材料的应变效应 ,将压力、应变等物理量 转换为电阻值变化。
热电阻式
利用导体或半导体的温度 效应,将温度变化转换为 电阻值变化。
电位计式
利用电位计的电刷在电阻 体上滑动,将位移或角位 移转换为电阻值变化。
稳定性与可靠性
稳定性
稳定性是指电阻式传感器在长时间使用或在不同条件下保持 其性能参数的能力。稳定性好的传感器能够提供更可靠、更 准确的测量结果。
可靠性
可靠性是指电阻式传感器在规定条件下和规定时间内完成规 定功能的能力。可靠性高的传感器具有更长的使用寿命和更 高的可靠性,能够保证测量的稳定性和准确性。
后续评估和改进。
06
电阻式传感器的发展趋势与展 望
Chapter
新材料、新工艺的应用
高分子电阻式传感器
01
利用高分子材料的导电性,具有灵敏度高、响应速度快、耐腐
蚀等特点。
纳米电阻式传感器
02
利用纳米材料的超小尺寸效应,实现传感器的高精度和高灵敏
度。
陶瓷电阻式传感器
03
利用陶瓷材料的稳定性和绝缘性,具有高温、高压、高频等优
良特性。
多功能、智能化的发展趋势
集成化
将多个传感器集成在一个芯片上,实现多参数、 多功能的测量。
智能化
通过微处理器和算法的应用,实现传感器的自校 准、自补偿和自诊断等功能。
网络化
通过物联网技术,实现传感器数据的远程传输和 实时监测。
在物联网、人工智能等领域的应用前景
物联网
第2章电阻式传感器(2009)
理论特性曲线
理想特性曲线
0
x
3. 非线性线绕电位器结构
Rx
1. 用曲线骨架绕制的非线性变阻器 2. 三角函数变阻器 3. 用分段法制成的非线性变阻器 线绕电位器 优点:精度高、性能稳定、易于实现线性变化等; 缺点:分辨率低、耐磨性差、寿命较短。
x
二、非线绕式电位器 1. 膜式电位器
碳膜电位器 优点:分辨率高、耐磨性较好、工艺简单、成本较低、线性度较好; 缺点:接触电阻大、噪声大。 金属膜电位器 优点:温度系数小;缺点:耐磨性差、功率小、阻值不高。
电阻器 绕线式
制作 直径0.012~ 0.1mm的镍铬 合金的精密电阻丝绕在绝 缘胶木板等卷芯上而制作 电阻胶印在陶瓷基板上, 并用高温烧制而成 将基板的树脂与电阻墨制 成一体,或将电阻胶涂于 薄膜基片上 导电性树脂涂于线绕式电 阻元件上
特点 电阻温度系数非常好, 为±5~20×10-6/℃,精 度、稳定性、重复性比 薄膜式好,分辨力低于 薄膜式 分辨力高,环境适应性 强,电阻温度系数为 ±200×10-6/℃ 分辨力、寿命、高速响 应特性好。电阻温度系 数为±400×10-6/℃ 兼有绕线式和导电塑料 式的优点,电阻温度系 数为±150×10-6/℃
KLr XR r Y 2 2 2 KL r r 1 r / KL r / KL 1 X R / KL X R / KL
式中 r——电阻的相对变化; KL——电位器负载系数的倒数; XR——电刷的相对行程; Y——电位计相对输出电压。
负载效应 Y 1.0 0.8 0.6 0.4 0.2 KL =∞ 0.5
dR d e x 2e y R
dR d (1 2m )e x R
令金属丝的轴向应变为dL/L=ex;径向应变为dr/r=ey 在弹性范围内,金属丝受拉力或压力时,沿 轴向伸长,沿径向缩短,则轴向应变和径向 应变的关系为:
理想特性曲线
0
x
3. 非线性线绕电位器结构
Rx
1. 用曲线骨架绕制的非线性变阻器 2. 三角函数变阻器 3. 用分段法制成的非线性变阻器 线绕电位器 优点:精度高、性能稳定、易于实现线性变化等; 缺点:分辨率低、耐磨性差、寿命较短。
x
二、非线绕式电位器 1. 膜式电位器
碳膜电位器 优点:分辨率高、耐磨性较好、工艺简单、成本较低、线性度较好; 缺点:接触电阻大、噪声大。 金属膜电位器 优点:温度系数小;缺点:耐磨性差、功率小、阻值不高。
电阻器 绕线式
制作 直径0.012~ 0.1mm的镍铬 合金的精密电阻丝绕在绝 缘胶木板等卷芯上而制作 电阻胶印在陶瓷基板上, 并用高温烧制而成 将基板的树脂与电阻墨制 成一体,或将电阻胶涂于 薄膜基片上 导电性树脂涂于线绕式电 阻元件上
特点 电阻温度系数非常好, 为±5~20×10-6/℃,精 度、稳定性、重复性比 薄膜式好,分辨力低于 薄膜式 分辨力高,环境适应性 强,电阻温度系数为 ±200×10-6/℃ 分辨力、寿命、高速响 应特性好。电阻温度系 数为±400×10-6/℃ 兼有绕线式和导电塑料 式的优点,电阻温度系 数为±150×10-6/℃
KLr XR r Y 2 2 2 KL r r 1 r / KL r / KL 1 X R / KL X R / KL
式中 r——电阻的相对变化; KL——电位器负载系数的倒数; XR——电刷的相对行程; Y——电位计相对输出电压。
负载效应 Y 1.0 0.8 0.6 0.4 0.2 KL =∞ 0.5
dR d e x 2e y R
dR d (1 2m )e x R
令金属丝的轴向应变为dL/L=ex;径向应变为dr/r=ey 在弹性范围内,金属丝受拉力或压力时,沿 轴向伸长,沿径向缩短,则轴向应变和径向 应变的关系为:
电阻式传感器
一般采用 = 0.05~0.1 mm 的银铜线、铬镍线、卡马线、铁铬铅丝等, 与敏感栅点焊相接。
4. 黏结剂
作用:将敏感栅固定于基片上,并将盖片与基底粘结在一起;使用金 属电阻应变片时,也需用黏结剂将应变片粘贴在试件表面某一方向和位置 上,以便感受试件的应变。 黏结剂材料:有机和无机两大类。
第2章 电阻式传感器
一、应变效应
导体或半导体材料在受到外界力(拉力或压力)作用时,产生机械变 形,机械变形导致其阻值变化,这种因形变而使其阻值发生变化的现象 称为“应变效应”。 l R 导体或半导体的电阻 S 导体或半导体在受外力作用时会产生
机械变形,从而使电阻率ρ、 长度 l 和截面积 S 这三者都发生变化,所 以会引起电阻的变化。通过测量阻值的变化,就可以反映外界作用力的 大小。
第2章 电阻式传感器
1. 直流电桥
(1)平衡条件
直流电桥的基本形式如图所示。R1、R2、R3、R4称为电桥的桥臂,RL 为其负载(可以是测量仪表内阻、放大器输入阻抗或其它负载)。 当RL→∞ 时,电桥的输出电压 Uo 应为
R1 R3 Uo E R用时,将伸长Δl ,横截面积相应减小ΔS ,电阻率将
因晶格发生变形等因素而改变Δρ,故引起电阻值相对变化量为
R l S R l S
第2章 电阻式传感器
R l S R l S
式中,l / l =ε为金属导体电阻丝的轴向应变, 常用单位 (1 = 1×10-6 mm/mm )。 由于S = d 2 / 4,则S / S = 2 d / d, 其中d / d 为径向应变; 且由材料力学知, d / d = ,式中为金属材料的泊松比。
当 n = 1 ,(R1 = R2 ,R3 = R4),电桥电压灵敏度最大。 此时电桥电压灵敏度
4. 黏结剂
作用:将敏感栅固定于基片上,并将盖片与基底粘结在一起;使用金 属电阻应变片时,也需用黏结剂将应变片粘贴在试件表面某一方向和位置 上,以便感受试件的应变。 黏结剂材料:有机和无机两大类。
第2章 电阻式传感器
一、应变效应
导体或半导体材料在受到外界力(拉力或压力)作用时,产生机械变 形,机械变形导致其阻值变化,这种因形变而使其阻值发生变化的现象 称为“应变效应”。 l R 导体或半导体的电阻 S 导体或半导体在受外力作用时会产生
机械变形,从而使电阻率ρ、 长度 l 和截面积 S 这三者都发生变化,所 以会引起电阻的变化。通过测量阻值的变化,就可以反映外界作用力的 大小。
第2章 电阻式传感器
1. 直流电桥
(1)平衡条件
直流电桥的基本形式如图所示。R1、R2、R3、R4称为电桥的桥臂,RL 为其负载(可以是测量仪表内阻、放大器输入阻抗或其它负载)。 当RL→∞ 时,电桥的输出电压 Uo 应为
R1 R3 Uo E R用时,将伸长Δl ,横截面积相应减小ΔS ,电阻率将
因晶格发生变形等因素而改变Δρ,故引起电阻值相对变化量为
R l S R l S
第2章 电阻式传感器
R l S R l S
式中,l / l =ε为金属导体电阻丝的轴向应变, 常用单位 (1 = 1×10-6 mm/mm )。 由于S = d 2 / 4,则S / S = 2 d / d, 其中d / d 为径向应变; 且由材料力学知, d / d = ,式中为金属材料的泊松比。
当 n = 1 ,(R1 = R2 ,R3 = R4),电桥电压灵敏度最大。 此时电桥电压灵敏度
第二章 电阻式传感器

4 1
3
4
5
2
3
图1薄膜型半导体应变片 1–锗膜 2--绝缘层
3–金属箔基底 4--引线
2
1
图2扩散型半导体应变片 1--N型硅 2--P型硅扩散层 3--二氧化硅绝缘层 4–铝电极 5--引线
型号的编排规则
电阻应变计型号的编排规则如下:类别、基底材料种类、标准电阻---敏感栅 长度、敏感栅结构形式、极限工作温度、自补偿代号(温度和蠕变补偿)及接 线方式。如B F 350 -- 3 AA 80 (23) N6 – X的含义是:
而引起的(称“压阻效应”)。 εx
对金属材料,以前者为主,则KS≈ 1+2μ;对半 导体, KS值主要由电阻率相对变化所决定。实验 表明,在金属丝拉伸比例极限内,电阻相对变化与
轴向应变成正比。其它金属或合金,KS在1.8~4.8
范围内。
dR R
KS
x
(2) 半导体应变片的工作原理
的片状小条,经腐蚀压焊粘贴在基片上而成的应变片,其 结构如图所示。
2)薄膜型半导体应变片 这种应变片是利用真空沉积技术将半导体材料沉积在带有
绝缘层的试件上而制成,其结构示意图见图1。 3)扩散型半导体应变片 将P型杂质扩散到N型硅单晶基底上,形成一层极薄的P型
导电层,再通过超声波和热压焊法接上引出线就形成了扩散型 半导体应变片。图2为扩散型半导体应变片示意图。这是一种 应用很广的半导体应变片。
半导体应变片是利用半导体
材料的压阻效应而制成的一种纯
1
电阻性元件。
2 3
对一块半导体材料的某一轴 12 3
向施加一定的载荷而产生应力时,
它的电阻率会发生变化,这种物 理现象称为半导体的压阻效应。
2电阻式传感器 (2)

2019年7月11日1时51分
13
2.3.1 温度误差产生的原因
温度引起应变片的附加应变
以上两项附加应变之和
t
t1 t2
t
k
t
( g
s )t
附加应变引入测量误差;
附加应变与温度变化、应变丝及试件的性能参数有关;
温度变化还会改变粘合剂传递应变的性能。
2019年7月11日1时51分
R1 R4 R2 R3
25
2.4.1 直流电桥
三种电桥性能比较
指标 灵敏度 线性 温度误差 须设置
桥类
自补偿 补偿片?
全桥
4
√
√
否
双臂半桥 2
√
√
否
单臂板桥 1
X
X
是
提高灵敏度的措施:
选择合适的电桥及贴片方式;
提高供桥电压:1~3V允许电流<25mA。
线性;
R 1 U R2
灵敏度为全桥的一半;
U0
(
R1
R1R4 R2
)(
R2 R3
R3 R4
)
U
i
温度误差自补偿; ■ 测量精度受电源电压波动影响.
2019年7月11日1时51分
23
2.4.1 直流电桥
(3) 半桥单臂
R1+
R1为应变片,R1=R+ΔR
R2 U0
第2章 电阻应变式传感器
2.1 2.2 电阻应变片的结构 2.3 2.4 2.5 电阻应变式传感器
开始 结束
2.1 应变片的工作原理
基于材料的电阻应变效应
导体几何尺寸变化电阻率变化
第02章 电阻式传感器

金属箔式应变片:利用光刻、腐蚀等工艺制成的一
种很:薄的金属箔栅, 其厚度一般在0.003~0.01mm。
其优点是散热条件好, 允许通过的电流较大, 可制 成各种所需的形状, 便于批量生产。
金属箔式应变片的结构形式
几种金属箔式应变片--可以根据测试物体的需要来选择各种形状的应变片
金属薄膜应变片: 采用薄膜技术(真空蒸发), 优点是灵敏系数大; 可在大温差下工作(-197--317℃) (二)应变片的粘贴技术---简单了解 粘贴剂; 粘贴工艺;
dr dl
r
l
dS 2 dr Sr
dR d (1 2) dl d (1 2)
R
l
dR 令 R K 由上式,得到
d K (1 2)
K——金属电阻丝的相对灵敏度系数。
金属电阻丝的相对灵敏度系数受两个因素影响:
(1)受力后材料的几何尺寸变化所引起的;即 (1下列材料制成: (1)康铜(铜镍合金):最常用; (2)镍鉻合金:多用于动态; (3)镍鉻铝合金:作中、高温应变片; (4)镍鉻铁合金:疲劳寿命要求高的应变片; (5)铂及铂合金:高温动态应变测量。
(二)应变片的测量原理
用应变片测量应变或应力时,把应变片粘帖在被测对象表面上, 在外力作用下, 被测对象产生机械变形时, 应变片敏感栅也随着 变形, 应变片的电阻值也发生相应变化。当测得应变片电阻值 变化量ΔR时, 便可得到被测对象的应变值ε(ΔR/R=k ε),再根据 应力σ与应变的关系(材料力学), 得到应力值σ
σ=E·ε
式中 : σ——试件的应力; ε——试件的应变;
E——试件材料的弹性模量(材料固定,是已知量)。
由此可知, 应力值σ正比于应变ε, 而试件应变ε正比于电阻 值的变化, 所以应力σ正比于电阻值的变化, 这就是利用应变片 测量试件应力σ的基本原理。
第2章2 电阻式传感器

R4 R1
U0U(R1R 1 R 1R 1R2R3R 3R4)
U
R3 R1
(1 R1 R2 )(1 R4 )
R1 R1
R3
R4 R1
根据 Uo U
R3 R1
(1 R1 R2 )(1 R4 )
R1 R1
R3
设桥臂比n = R2/R1, 由电桥平衡条件可知R4/R3 =R2/R1=n ,并且忽略分母中ΔR1/R1得到:
dKU dn
U(11nn)23
0
故 n=1时,即R1=R2,R3=R4 ,KU取得最大值。
从上面的讨论可知:当R1=R2,R3=R4时, 电桥电压 灵敏度最高, 此时有:
U0
U 4
R1 R
KU
U 4
n=1时的电桥,称为对称电桥,实际应用中常采用 这种电桥的形式。
直流电桥的优点:
高稳定度直流电源易于获得; 电桥调节平衡电路简单; 传感器及测量电路分布参数影响小等。
U 0U ( R 1 R R 11 R R 21 R 2R 3R 3R 4)
设初始时有: R1=R2=R3=R4=R, 且应变量相同即
ΔR1=ΔR2,则得:
U0
Hale Waihona Puke U 2R1 R
结论:差动电桥(半桥差动电路)消除了非线性 误差(输出电压表达式的分母不含ΔR1/R1 ), 灵敏度比单臂电桥提高了一倍。且具有温度补偿 作用。
(三)机械滞后、零漂和蠕变
加载和卸裁特性曲线之间的最大 差值称为应变片的滞后值(也就 是回程误差)。
粘贴在试件上的应变片,在温度 保持恒定没有机械应变的情况下, 电阻值随时间变化的特性称为应 变片的零漂(零点漂移)。