产品系列YK1200X水平多关节机器人
PLC应用于六轴关节机器人

技术特点&难点6
运动轨迹控制程序 在进行六轴关节机器人的PLC整体程
序设计和规划时,运行轨迹控制程序 采用的是永宏PLC【FUN 147(直线插 补)】指令来完成1#~4#伺服四轴联动 控制和5#~6#伺服两轴联动控制;并采 用绝对位置进行轨迹坐标点定位,能 够很好的实现运行轨迹坐标控制。
Page:19
应用领域
生产 行业
物流 行业
组装 行业
焊接
六轴关节机器人
行业
喷涂 行业
Page:20
应用效果
六轴关节机器人应用效果
人工成本
操作界面简单易学, 很容易上手,投入生 产。
生产产量
可以减少人工, 节约人工成本。
生产产量高,取代人工
Page:21
芝麻工控PLC教育机构
Page:17
技术特点&难点7
行程极限保护程序 在进行六轴关节机器人的PLC整体程
序设计和规划时,行程保护控制程序 采用的是通过实际机械位置脉冲值与 程序软极限行程脉冲值进行比较;当 实际机械位置脉冲值超过程序软极限 行程脉冲值时,会触发行程保护控制 程序,让当前运行的伺服立即停止运 行。
Page:18
Page:13
技术特点&难点3
永宏伺服通讯程序 在进行六轴关节机器人的PLC整体程
序设计和规划时,伺服通讯采用的是 永宏PLC的Port 1通讯口,进行PLC与 1#~6#伺服之间ModBus RTU通讯,最高 通讯速度可以达到115.2Kbps;主要用 于将1#~6#伺服的编码器反馈信号读取 到从站PLC。伺服通讯程序采用的是永 宏PLC【FUN 150(ModBus)】指令来 进行编辑,一条通讯指令既可以完成 伺服通讯程序的编辑,为程序编辑和 调试者提供了极大的方便。
关节机器人技术参数
关节机器人技术参数关节机器人是一种利用电机、传感器和控制系统等技术实现各种复杂任务的机械装置。
本文将介绍关节机器人的技术参数,包括负载能力、速度范围、精度要求、控制系统等方面的内容,以便于全面了解关节机器人的性能特点。
**1. 负载能力**关节机器人的负载能力是指它能够承受的最大负载重量。
通常来说,不同机器人的负载能力会有所不同,根据不同的任务需求,用户可以选择适合的负载能力的机器人。
常见的关节机器人的负载能力在10kg到500kg之间,具体选择应根据实际任务需求进行。
**2. 速度范围**关节机器人的速度范围是指它可以实现的最大移动速度和加减速度范围。
速度范围是关节机器人在不同任务下的重要参数,不同的任务需要不同的速度范围。
一般来说,关节机器人的速度范围可以达到每秒1m到10m不等,而加减速度的范围也会相应变化。
**3. 精度要求**关节机器人在执行各种任务时需要具备一定的精度,以保证任务的准确性和可靠性。
精度要求包括位置精度、重复定位精度和轨迹精度等方面。
一般来说,关节机器人的位置精度可以达到毫米级别,而重复定位精度可以达到几十微米的水平,轨迹精度也符合实际任务需求。
**4. 控制系统**关节机器人的控制系统是其核心部分,它包括控制器、编程软件、传感器等组成。
控制系统的性能直接影响着机器人的运行效果,因此具备稳定性、灵活性和易于操作等特点的控制系统是关节机器人的一个重要技术参数。
目前市面上常见的关节机器人控制系统包括开放式控制系统和闭环控制系统,用户可以根据实际需求选择合适的控制系统。
总结:关节机器人作为现代工业生产中的重要装备,其技术参数直接关系到其在不同领域的应用效果。
除了上述提及的负载能力、速度范围、精度要求和控制系统外,还有很多其他参数也需要考虑。
随着科技技术的不断发展,关节机器人的性能将会不断提升,应用范围也将不断扩大。
机器人智能一体化关节
机器人智能一体化关节
随着机器人技术的不断发展,机器人的智能化和一体化设计已成为重要的研究方向。
机器人的关节是连接其机械臂和端执行器的关键部件,其设计直接影响到机器人的灵活性和适应性。
传统的机器人关节结构较简单,存在运动范围有限、重复定位精度不高等问题。
为实现机器人的智能化,关节的传感、控制、驱动等部件需一体化设计。
一体化智能关节将传感、控制、驱动系统集成在一个紧凑的关节内,实现了高度的集成化。
这种关节内置多种传感器,如位置、速度、力矩、温度传感器等,能实时检测关节的运动状态。
同时,关节内嵌入了驱动电机、减速器、控制电路等,实现了自主控制和驱动。
控制系统采用先进的算法,能进行运动规划、力控等智能控制。
一体化设计降低了系统的复杂性,减小了关节体积,提高了机器人的负载能力和动作灵活性。
此类一体化智能关节正在用于各种机器人的研发。
例如用于人形机器人手臂的智能关节,集成了细密的位置反馈、运动控制和驱动系统,使其拥有与人手相似的灵巧性。
在工业机器人方面,一体化智能关节可以优化机械臂的控制精度和运动协调性,实现复杂运动控制。
这种关节技术将推动机器人向更高的智能化方向发展。
骨科手术机器人

挑战
技术成本高
骨科手术机器人技术 含量高,导致设备成 本和维护成本较高。
法规和伦理问题
关于机器人手术的法 规和伦理规范尚不完 善,需要进一步探讨
和研究。
医生接受度
部分医生可能对新技 术持保守态度,需要 加强培训和宣传以提
高接受度。
技术更新迭代快
随着技术的不断发展, 骨科手术机器人需要 不断更新和升级,以
优势
精准度高
骨科手术机器人能够实现 高精度的定位和操作,减 少手术创伤和风险。
操作稳定性强
机器人能够消除人为因素 引起的操作误差,提高手 术的稳定性和成功率。
减少医生工作强度 缩短恢复时间
机器人可以代替医生进行 重复性操作,减轻医生的 工作强度,降低疲劳程度。
精准的手术操作有助于患 者快速恢复,缩短住院时 间和康复周期。
生活质量。
创伤修复手术
创伤修复手术是一种紧急、高风险的手术,通过手术机器人辅助,能够 快速、准确地完成创伤修复,减少手术创伤和术后并发症,提高患者术 后恢复效果。
手术机器人能够快速、准确地完成创伤修复手术中的清创、缝合和固定, 减少手术时间和医生的操作难度,提高手术效率。
手术机器人辅助的创伤修复手术能够实现个性化定制,根据患者的具体 情况进行精确的清创、缝合和固定,提高患者的满意度和生活质量。
交互操作
远程控制技术可以让医生在远离手术 台的地方进行手术操作,提高手术的 安全性和便利性。
医生可以通过远程控制技术对机械臂 进行实时控制和调整,实现与手术现 场的交互操作。
实时传输
远程控制技术可以将手术过程中的图 像、数据等信息实时传输给医生,方 便医生进行远程监控和指导。
03
骨科手术机器人优势与挑战
天玑骨科机器人产品手册
天玑骨科机器人产品手册摘要:I.引言- 介绍天玑骨科机器人的背景和重要性II.天玑骨科机器人的技术特点- 骨科手术机器人的发展历程- 天玑骨科机器人的核心技术- 天玑骨科机器人的功能优势III.天玑骨科机器人的应用领域- 脊柱手术- 创伤手术- 关节置换手术- 其他应用IV.天玑骨科机器人的优势和挑战- 优势:提高手术精度、减少创伤、缩短恢复期- 挑战:技术复杂、成本高昂、手术适应症有限V.结论- 总结天玑骨科机器人的特点和应用- 展望骨科手术机器人的未来发展正文:I.引言骨科手术机器人是一种结合了医学、机械工程、计算机科学等多个领域技术的先进设备,能够辅助医生进行精准、微创的骨科手术。
在我国,骨科手术机器人的研究和应用正在逐步展开,其中天玑骨科机器人是一款备受瞩目的产品。
本文将为您详细介绍天玑骨科机器人的产品特点、应用领域以及优势和挑战。
II.天玑骨科机器人的技术特点天玑骨科机器人采用了先进的三维成像、导航定位、自动控制等技术,能够在手术过程中为医生提供实时、精确的信息反馈,从而实现精准的手术操作。
此外,天玑骨科机器人还具有一系列独特的功能优势,如灵活的操作臂、自动化的手术工具切换等。
III.天玑骨科机器人的应用领域天玑骨科机器人广泛应用于脊柱手术、创伤手术、关节置换手术等领域。
其中,在脊柱手术方面,天玑骨科机器人能够实现精准的椎弓根钉内固定术,大大提高了手术的安全性和有效性;在创伤手术方面,天玑骨科机器人能够实现精准的骨折复位和固定,降低手术并发症的风险;在关节置换手术方面,天玑骨科机器人能够实现精确的关节假体植入,提高手术效果和患者满意度。
IV.天玑骨科机器人的优势和挑战天玑骨科机器人的优势主要体现在提高手术精度、减少创伤、缩短恢复期等方面。
然而,天玑骨科机器人也面临着一些挑战,如技术复杂、成本高昂、手术适应症有限等。
随着技术的不断发展和优化,相信这些问题将逐步得到解决,天玑骨科机器人的应用前景将更加广阔。
川崎机器人产品介绍(二)2024

川崎机器人产品介绍(二)引言概述:川崎机器人是一家领先的工业机器人制造商,其产品广泛应用于汽车制造、电子设备生产、医疗器械等行业。
本文将介绍川崎机器人的五大产品系列,包括机械臂、协作机器人、清洁机器人、教育机器人和特殊用途机器人。
每个产品系列都具有独特的功能和优势,能够满足不同行业的需求。
正文:一、机械臂系列:1. 灵活多变:川崎机械臂系列具有高度可编程性和灵活性,能够根据生产线的需求进行快速调整。
2. 高精度:川崎机械臂具有出色的定位精度和重复性,可实现精准的零件加工和装配。
3. 高负载能力:川崎机械臂可承载重物,适用于大型零件的搬运和装配。
4. 安全可靠:川崎机械臂配备有安全传感器和防护装置,确保操作人员的安全。
5. 易操作:川崎机械臂配备直观的人机界面,易于操作和监控。
二、协作机器人系列:1. 与人合作:川崎协作机器人具有先进的感应技术,能够与人类操作员共同工作,实现人机协同。
2. 灵敏度高:川崎协作机器人采用先进的力矩传感器和视觉系统,能够准确感知和响应环境变化。
3. 空间占用小:川崎协作机器人体积小巧,适用于空间有限的工作场所。
4. 多功能:川崎协作机器人能够执行多种任务,包括装配、包装、搬运等。
5. 高安全性:川崎协作机器人采用紧急停止和安全防护设计,确保操作人员的安全。
三、清洁机器人系列:1. 自动化清洁:川崎清洁机器人能够自动清洁生产线和设备,提高生产效率。
2. 多功能操作:川崎清洁机器人可执行除尘、拖地、擦窗等多种清洁操作。
3. 智能导航:川崎清洁机器人配备智能导航系统,能够自主规划清洁路径。
4. 省时省力:川崎清洁机器人能够减轻人工清洁工作的负担,节省时间和人力成本。
5. 高效节能:川崎清洁机器人采用高效清洁技术,减少清洁剂和能源的消耗。
四、教育机器人系列:1. 初级编程教育:川崎教育机器人适用于初级编程教育,帮助学生培养逻辑思维和创造力。
2. 多样性学习:川崎教育机器人可执行多种任务,如拼装、绘画、舞蹈等,丰富学习内容。
康复设备总表
TDP电磁波治疗器(神灯)
腿浴治疗仪
足疗仪
真空拔罐器
治疗床
多功能牵引床
老年康复
四肢联动全身功能康复训练 器
Nustep
运动控制魔方
MR-CUBE
情景互动
IREX
上肢康复工作站
瑞乐驰
上肢多关节多方向康复训练 器
EF-100W
有氧运动训练系列
Technogym
前列腺治疗仪
中药熏蒸治疗仪
熏蒸床
生物反馈治疗仪
音乐治疗仪
高压静电治疗仪
无抽搐电休克治疗仪
脑波治疗仪
心理测评软件
上海惠成心理测评软件(成人、 儿童)
音乐放松椅
心理挂图
宣泄器材
宣泄辅助器材
沙盘
沙具
团体活动包
情绪管理系统
多功能训练器(八、七、四 件组合)
矫正镜(带格)
胸背部矫正运动器(配拉力 器)
投篮器
肌力训练弹力带
弧形腹肌训练器(高度可调)
骑马训练器
体操棒与抛接球(卧式、立 式)
橡筋手指练习器
滑轮吊环训练器
肩梯
上肢协调功能练习器(腕)
重锤式手指肌力训练桌
肩关节回旋训练器(肩关 节康复训练器)
多用起立训练台
多体位治疗床
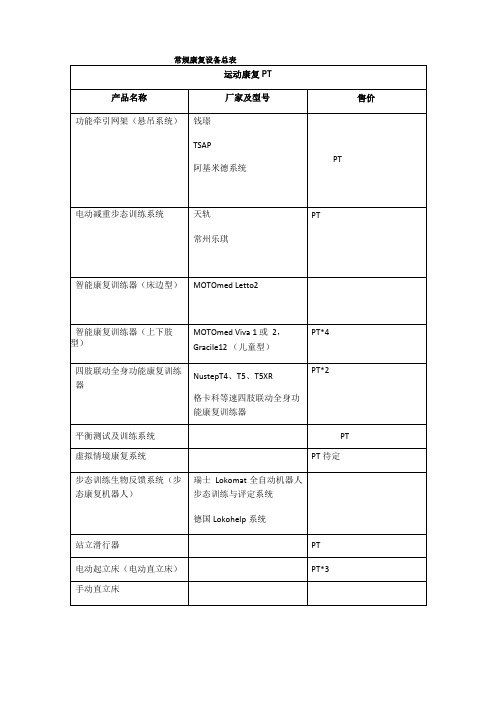
NustepT4、T5、T5XR
格卡科等速四肢联动全身功 能康复训练器
PT*2
平衡测试及训练系统
PT
虚拟情境康复系统
PT待定
步态训练生物反馈系统(步 态康复机器人)
瑞士Lokomat全自动机器人
步态训练与评定系统
德国Lokohelp系统
站立滑行器
PT
SCARA四轴机器人

短马达的采用与电缆线设计,在高度上成为 同行业中最低的机种,提高了系统设计的自由度
YAMAHA SCARA XG机器人的构造長処
与以前的机种比较 高精度化 高速度化 高耐久性。
而且,部品数的减少,
大大降低了成本。
超小型水平多关节机器人Tiny系列
YK120/150XG 负载1kg(Z=50mm)
YAMAHA最小机种。 适应于微小产品的搬运等。
YK180/220X 负载1kg(Z=100mm)
不但小型且可确保刚性。 实现了作业空间的有效利用与周 期时间缩短
以上两种规格都采用了无皮带传动构造 实现了小型、高精度、持久性
超小型水平多关节机器人Tiny系列
YK120/150/180XG ,YK180/220X
构造
YAMAHA的以前
Z軸马达
皮帯
其他公司的構造
現在YAMAHA的XG構造
Ball screw-Ball spline
Ball screw
Z軸Motor
空心R軸马达
Ball spline
皮帯
ቤተ መጻሕፍቲ ባይዱ
R軸马达 皮帯
皮帯
R軸Motor
R軸減速机
空心Z軸马达
YAMAHA的构造実現簡易示和 良好Z动作在插补移动。
XY 4.9m/sec
7.6m/sec
45%向上
1.7m/sec
Z
2.3m/sec
876deg/sec
R
1700deg/sec
35%向上 90%向上
・手臂基板采用优质的挤压成形铝合金
根据优质铝合金的采用与构造解析,与以前的机种 相比,实现了高刚性化。 此外,与以前使用的铸造零部件相比,降低了成本, 实现了低成本化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YK500TW 主机重量27kg! YD11
减轻约74% 75kg
YK-TW POINT 7
缩短工时
需要准备安装架ɼ很麻烦ʜʜ 备有 YK-TW 专用的安装架作为选件ɻ
无须进行麻烦的强度计算ɼ 可减少启动工时ɻ
˞ 外形尺寸ɺ价格等的详情请咨询本公司ɻ
YK-TW POINT 8
最适合狭小空间
希望安装到设备之间等狭小空间ʂ
安装宽度 492mm ˞ 1
下方通过动作
可有效利用主机正下方的空间
492mm 可安装到设备之间 等狭小空间
前端ʢR轴ʣ 可通过主机正下方
YK-XG 完全无皮带机型
独具匠心的内部结构
˞以 YK500XG 为例ɻ
高刚性独立花键轴
高性价比机型 YK400XR
超过 30 年的良好业绩
雅马哈机器人从水平多关节机器人的生产起步ɻ自 1979 年生产了最初的水平多关节机器人ʠCAMEʡ以来ɼ 30 年来坚持不懈地从事水平多关节机器人的开发ɻ在市场中锻炼ɺ反复改进而实现的长久业绩是雅马哈 水平多关节机器人发展的基础ɻ
ቤተ መጻሕፍቲ ባይዱ
1979 年 ʪYK7000ʫ
YK500TW 标准周期时间0.29sec!!
约36% DOWN
本公司以往机型
周期时间
负载 1kgɺ执行水平 300mmɺ上下 25mm 的往返动作时ɼ标准 周期时间与本公司以往机型相比缩短约 36%ɻ
Y 马达 减速器 R 马达
Z 马达
中空结构
Y马达和减速器采用中空结构, 可将线束收纳到机械臂内部。
40
以丰富的产品阵容为傲的 YAMAHA 水平多关节机器人ɻ
全方位型
˙ 机械臂长度 500mm ˙ 最大可搬运重量 4kg
P.372
大型
˙ 机械臂长度 700mm ʙ 1200mm ˙ 最大可搬运重量 20kg ʙ 50kg
P.395
YK500TW
微型机型 超小型水平多关节机器人
˙ 机械臂长度 120mm ʙ 220mm ˙ 最大可搬运重量 1kg
YK-X
Series
产品系列
Y K-T W Y K-XG / Y K-X YK-XR YK-XGS YK-XGP
˞ Y K12 0 0X 除 外
全方位机型 完全无皮带机型˞ 高性价比机型 壁挂、反向机型 防尘、防滴机型
水平多关节机器人
机械臂长120 mm~120 0 mm的行业高端产品系列ʂ 完 全 无 皮 带 结 构 ,将水平 多关 节 机器人 的 特点 发 挥 到 极 致ʂ
产品系列
YK-TW 全方位型
YK-TW POINT 1
自由的布局设计
希望设备小型化ʂ 可在机器人下方П 1000mm ˞ 2 范围内全区域动作
凭借悬挂结构和大范围的机械臂旋转角度ɼYK-TW 可在机器人 下方П 1000mm 范围内全区域动作ɻ 托盘及传送带在设置上没 有限制ɼ大大有利于设备的小型化ɻ
YK-TW POINT 3
实现更优异的品质
希望组装作业精度更高ʂ 重复定位精度 : XY 轴 ʶ 0.01mm ˞ 1
比起并行链接机器人ɼ重复定位精度大大提高ɻ 彻底改善了机器 人内部结构ɼ实现了最佳重量平衡ɻ 同时ɼ搭载了针对轻量和高 刚性机械臂进行了最佳调节的马达ɼ实现了高精度定位ɻ
可动范围 C
A
B
C
A
B
全方位型 水平多关节机器人
C
A
B
标准型 水平多关节机器人
YK-TW POINT 2
提高生产效率
希望缩短节拍时间ʂ 标准周期时间 0.29sec ˞ 2
凭借 Y 轴ʢ第 2 臂ʣ可在 X 轴ʢ第 1 臂ʣ下方通过的水平多关 节结构ɼ能够以最佳路径实现点位间的高速移动ɻ 此外ɼ通过内 部重量平衡的优化ɼ使周期时间比本公司以往机型缩短了 36%ɻ
P.401
YK400XR
YK250XG/YK350XG/YK400XG
中型
˙ 机械臂长度 500mm ʙ 600mm ˙ 最大可搬运重量 5kg ʙ 20kg
P.388
壁挂型
˙ 壁挂型 机器人主机安装在墙面的机型
˙ 反向型 与壁挂型上下颠倒的机型
防尘ɺ防滴机型
反向型
P.411
YK500XGL YK600XGL
具有单轴机器人同等的 滚珠丝杆直接连接结构
内置用户接线 / 用户配管
专门开发的中空 马达
YK-XG POINT 1
完全无皮带结构
采用 ZR 轴直接联轴结构ɼ实现完全无皮带结构ɻ无皮带结构可大 幅减少空转ɻ 可长期维持高精度ɻ 且无需担心皮带的破损ɺ松弛 和老化ɼ可长期免维护使用ʢ全方位型ɺ大型机型除外ʣɻ
可360度旋转ʂʂ
优化旋转重心力矩
左右配置R马达和Z马达,实现了重量 的最佳平衡。
降低了惯性ɼ可实现高速动作ʂʂ
YK-TW POINT 4
希望在各种用途中
高速搬运重型工件ʂ 可搬运重量ɿ5kg
与同等机型比较ɼ最大可搬运 5kg 重的工件ɻ还可应对往往很重 的前端工具ɼ有利于装置的多功能化ɻ
YK-TW POINT 5
设备更节省空间
希望降低设备高度ʂ
总高低于并行链接机器人ɼ更省空间
YK-TW 的总高为 392mmɻ可实现设备的紧凑化ɼ提高装置的布 局自由度ɻ
YK500TW
YD11
392mm
844mm
42
˞ 1. YK350TW 时 ˞ 2. YK500TW 时
YK-TW POINT 6
安装简便
并行链接机器人 需要大型台架ɼ安装麻烦ʜʜ
P.376
YK700XG
YK900XG
YK120XG/YK150XG/YK180XG
YK180X/YK220X
小型机型
˙ 机械臂长度 250mm ʙ 400mm ˙ 最大可搬运重量 5kg
高性价比机型 YK400XR
P.381
YK1200X
壁挂ɺ反向机型
YK300XGS ʙ YK1000XGS
YK800XG YK1000XG
YK500XG YK600XG/XGH
YK250XGP/YK350XGP/YK400XGP YK500XGLP/YK600XGLP
YK500XGP ʙ YK1000XGP
最适合在水ɺ粉尘较多的作业环境中使用的防尘ɺ防滴型ʢ相当于防护等级 IP65ʣ
˔有关水以外的防滴性能ɼ请咨询本公司ɻ
41
YK-X Series
以往机型
上下轴马达 旋转轴马达
YK-XG 系列
旋转轴 中空马达
上下轴 滚珠丝杆
前端旋转轴也采用 谐波齿轮直接连接结构ɼ 具备高刚性ɺ高精度
通过皮带轮和正时 皮带驱动
˔ 刚性和精度由传送带决定 ˔ 传送带有松弛等老化现象