工程光学第2章 共轴球面光学系统
合集下载
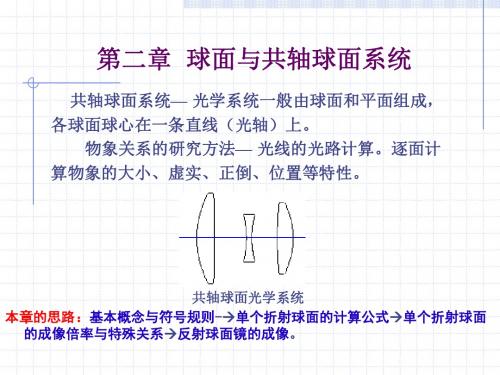
第2章 共轴球面系统
β=
y′ l ′ r = y l r
l ′ r nl ′ = lr n ′l
因此横向放大率为: β
=
y′ nl′ = y n ′l
(1 )
2.2 单个折射球面的成像放大率 及拉赫不变量
2.
y′ nl ′ nu 讨论: 讨论:β = = = y n′l n′u ′
β > 1, 放大像 β < 1, 缩小像
(1)式表示物像位置的关系 物像位置的关系;(2)式称为阿贝 物像位置的关系 阿贝 不变量公式,它表示单个折射球面物方和像方的 不变量 Q值相等;(3)式表示近轴光线经球面折射后物 物 像方孔径角的关系. 像方孔径角 例题:有一折射球面,其参数为 r = 20mm, n = 1, n′ = 1.5163, 物距为 l = 60mm ,求像距的值.
2.1光线经单个折射球面的折射 2.1光线经单个折射球面的折射
2.近轴光线的光路计算公式 近轴光线的光路计算公式: 近轴光线的光路计算公式
Lr sinI = sinU r U′ =U + I I′ n ′ = sinI sinI n′ sinI′ ′ = r(1+ L ) ′ sinU
光线平行于光轴:光线的入射角用光线的入射高度 表示为: i = h / r
物点由A1移动到A2点,物方截距l2-l1,像方截距 l'2-l'1,则轴向放大率为: n′ α = β1 β 2 ——平均沿轴放大率
n
结论:只有当dl很小时,才能满足
dl ′ nl ′2 n′ 2 = 2 = β α= dl n′l n
5.角放大率 5.角放大率
2.2 单个折射球面的成像放大率 及拉赫不变量
2.2 单个折射球面的成像放 大率及拉赫不变量
+第2章球面和共轴系统
说明:1)β>0,y与y’同号,成正像,反之倒像。
2)β>0,l与l’同号,物像虚实相反,反之相同。
3)|β|>1,放大像,反之为缩小像。
利用公式就可以由任意位置和大小的物体,求得单个折射球面所成的近轴像的大小和位置。
2.2
推导:如图所示,ΔABC~ΔA’B’C 。则 -y/y’=(l’-r)/(-l+r)
该式说明:在近轴区域内,l’是l的函数,与u无关,这 表明轴上物点在近轴区域内成完善像。这个像点称为高 斯像点。
2.1
• 使用变换公式的优缺点:
• (1)方便
• (2)在一定条件下是方便的,实际当中有的光 线的孔径角U比较小,至少中心部分是如此。 • (3)将用上式算出 l ' 作为像点位置作为标准位 置,称为高斯像点,设法使 U 角的光线与光轴
k n 2 ' 2 n3 ' 2 2 3 n2 n3
2.3 3.球面反射镜成像
凹面镜成像
凸面镜成像
2.3
1)球面反射镜的物像 位置关系 由 n' n n' n l' l r 当 n' n, 1 1 2 l' l r 2)成像倍率
2.1 2.实际光线经过单个折射球面的光路计算公式
已知:折射球面曲率半径r,介质折射率n和n’, 物方坐标L和U。 求:像方坐标L’和U’。
三角形AEC中应用正弦定律,得到
0 sin( 180 I) sin( U ) L r r
则
sin U sin I (Lr) r
根据折射定律
2.3 2.共轭球面系统的倍率计算
1).垂轴倍率β
y 2 y y k k 1 y y y y 1 1 y 3 k
2)β>0,l与l’同号,物像虚实相反,反之相同。
3)|β|>1,放大像,反之为缩小像。
利用公式就可以由任意位置和大小的物体,求得单个折射球面所成的近轴像的大小和位置。
2.2
推导:如图所示,ΔABC~ΔA’B’C 。则 -y/y’=(l’-r)/(-l+r)
该式说明:在近轴区域内,l’是l的函数,与u无关,这 表明轴上物点在近轴区域内成完善像。这个像点称为高 斯像点。
2.1
• 使用变换公式的优缺点:
• (1)方便
• (2)在一定条件下是方便的,实际当中有的光 线的孔径角U比较小,至少中心部分是如此。 • (3)将用上式算出 l ' 作为像点位置作为标准位 置,称为高斯像点,设法使 U 角的光线与光轴
k n 2 ' 2 n3 ' 2 2 3 n2 n3
2.3 3.球面反射镜成像
凹面镜成像
凸面镜成像
2.3
1)球面反射镜的物像 位置关系 由 n' n n' n l' l r 当 n' n, 1 1 2 l' l r 2)成像倍率
2.1 2.实际光线经过单个折射球面的光路计算公式
已知:折射球面曲率半径r,介质折射率n和n’, 物方坐标L和U。 求:像方坐标L’和U’。
三角形AEC中应用正弦定律,得到
0 sin( 180 I) sin( U ) L r r
则
sin U sin I (Lr) r
根据折射定律
2.3 2.共轭球面系统的倍率计算
1).垂轴倍率β
y 2 y y k k 1 y y y y 1 1 y 3 k
工程光学(第二章)

L' r(1 sin I ' ) (2-4) sinU '
i lru r
i' n i n'
u' u i i'
l' r(1 i' ) u'
称为小 l 公式
ni
E
n’
h φC
O
r
当无限远物点发出的平行光入射时,有 继续用其余三个公式。
i h r
小 l 公式也称为近轴光线的光路追迹公式
例2:仍用上例的参数,r = 36.48mm, n=1, n’=1.5163 l = - 240mm, sinU= u = - 0.017, 求:l ’, u’
L1 B
L2 B’
A1
A
A’
B1
对于L1而言,A1B1是AB的像;
对L2而言,A1B1是物,A’B’是像,则A1B1称为中 间像
※物所在的空间为物空间,像所在的空 间为像空间,两者的范围都是 (-∞,+∞)
※ 通常对于某一光学系统来说,某一 位置上的物会在一个相应的位置成一个 清晰的像,物与像是一一对应的,这种 关系称为物与像的共轭。
n' u' nu h( n' n ) r
将 l u = l’ u’ = h 代入,消去u和u’ , 可得
n( 1 1 ) n'( 1 1 ) Q
rl
r l'
也可表示为
n' n n' n l' l r
上式称为单个折射球面物像位置公式
n' u' nu h( n' n ) r
n( 1 1 ) n'( 1 1 ) Q
nI
第二章 共轴球面系统(二)

= l2u2 l'1 u'1d1u'1 ,l3u3 l'2 u'2 d2u'2 , lkuk l'k1 uk1 dk1uk1
共轴球面系统的过渡公式(3-2)
lu l'u' h
l1u1 l'1 u'1 h1 ,l2u2 l'2 u'2 h2 ,
l2u2 l'1 u'1d1u'1 ,l3u3 l'2 u'2 d2u'2 , lkuk l'k1 uk1 dk1uk1
拉格朗日- 赫姆霍兹恒等式
y' nl'
y n'l
lu l'u'
J为拉赫不变量 nuy n'u' y' J
题 例 1:在一直径为30cm的球形玻璃鱼缸内盛满水,鱼缸中
心处有一条小鱼,求缸外观察者看到鱼的位置及放大率!
解: n n n n l' l r
n' 4 ,l 15, r 15代入 3
定义:通过一定光学系统所成的像对光轴的 垂直高度与物本身对光轴的垂直高度的比。
公式:
y'
y
近轴区的放大率
-u
u’
近轴区的放大率----横向放大率
y'
y
y' l'r y l r
n(1 1) n'(1 1)
rl
r l'
物像位置关系式
n l r n' l' r
rl
rl'
l r l' r n' l nl'
n'k 2
共轴球面系统的过渡公式(3-2)
lu l'u' h
l1u1 l'1 u'1 h1 ,l2u2 l'2 u'2 h2 ,
l2u2 l'1 u'1d1u'1 ,l3u3 l'2 u'2 d2u'2 , lkuk l'k1 uk1 dk1uk1
拉格朗日- 赫姆霍兹恒等式
y' nl'
y n'l
lu l'u'
J为拉赫不变量 nuy n'u' y' J
题 例 1:在一直径为30cm的球形玻璃鱼缸内盛满水,鱼缸中
心处有一条小鱼,求缸外观察者看到鱼的位置及放大率!
解: n n n n l' l r
n' 4 ,l 15, r 15代入 3
定义:通过一定光学系统所成的像对光轴的 垂直高度与物本身对光轴的垂直高度的比。
公式:
y'
y
近轴区的放大率
-u
u’
近轴区的放大率----横向放大率
y'
y
y' l'r y l r
n(1 1) n'(1 1)
rl
r l'
物像位置关系式
n l r n' l' r
rl
rl'
l r l' r n' l nl'
n'k 2
工程光学第二章123节

二、共轴理想光学系统的成像性质
1 、位于光轴上物点的共轭像点必然在光轴上;位于过光轴的某 一截面内的物点对应的共轭像点必位于该平面的共轭像面内,过 光轴的任意截面成像性质都相同。
2 、垂直于光轴的物平面,其共轭像 平面也必然垂直于光轴,且平面物与 其共轭平面像的几何形状完全相似, 即:在垂直于光轴的同一平面内,物 体的各部分具有相同的放大率 。
(1)平行于光轴入射的光线,经过系统后过像方焦点。
H
H’
F’
F’
H
H’
F
1、可供选择的典型光线和可供利用的性质有:
(2)过物方焦点的光线,经过系统后平行于光轴。
H
H’
F’
F’
H
H’
F
(3)倾斜于光轴的平行光线,经过系统后交于像方焦平面上某 一点。 (4)自物方焦平面上一点发出的光束经系统后成倾斜于光轴的平 行光束。
w:反映轴外物点偏离光轴 的角距离
一束平行光线经过理想光组后,一定相交于像方焦平面 上的某一点,这一点就是无限远轴外物点的共轭像。
( 四 ) 物 方 焦 点 、 物 方 焦 平 面 ; 物 方 主 点 、 物方主平面;物方焦距
E
F -U H
Q
E’
B
h
- f
※ 如果轴上某一点F的共轭像点在无限远处,即由F发出的光线 经光组后与光轴平行,则 F 称为系统的物方焦点。
到哪里找这 样的系统呢?
理想光学系统 —— 任意大的空间、以任意宽的光束入
射都成完善像的光学系统。
为了揭示物、像、成像系统三者之间的内在联系, 可暂时抛开成像系统的具体结构,将一般仅在光学系统 近轴区存在的完善像拓展成在任意大的空间以任意宽光 束都能完善成像的理想模型,即称为理想光学系统,又 称为高斯光学系统(1841年由高斯提出)。
华中科技大学 工程光学第二章 球面与共轴球面系统(15)
5. 拉赫不变量J:折射面前后三个量n、u、y的乘积相等
y n l n u y n l n u
J nuy nuy
意义:1)计算象差的公式中出现;
2)校对计算结果的正确性;
3)在光学设计中有重要作用。为了设计出一定垂 轴倍率的光学系统,在物方参数nuy固定的条件下,常通 过改变像方孔径角u′的大小来改变y′的数值,使得y′与y 的比值满足系统设计的要求。
三、 远轴光的计算公式(实际光线光路计算)
给定n、 n′、r,已知L、U,求解L′、 U′ 其中U、 U′较大,远轴光线成像(大光路)
正弦定理、折射定律,三角关系
I E I′ φ O U′ n′ h -U A
Lr sin I sin U r n sin I sin I n U U I I sin I L r r sin U
l1 n l1 l 2 n l2 1 2 l 2 l1 n l1l 2 n
推导P22
3. 角放大率:共轭光线与光轴的夹角u′和u的比值
u l n 1 u l n n 2 n 1 a 4. 三者关系: n n
n
C
A′
r -L L′
Lr sin I sin U r 公式的对称性 n sin I n sin I U I U I L r sin I sin U r
说明:
1)L′=f (U、L、n、n′、r) 2)当L为定值时,L′随U变化而变化,象方光束失去同心性, 成不完善象,形成球差。
3. 放大率公式
1)垂轴放大率:
l 2 l k yk n1 l1 n1u1 1 2 k l1l 2 l k nk uk y1 nk dl k n n n 1 2 k 1 12 k k2 k 2 dl1 n1 nk n1
工程光学第2章 共轴球面光学系统
10
共轴球面光学系统
§2.4
共轴球面系统的成像
11
1. 过渡公式
共轴球面光学系统
, n3 n2 , , nk nk 1 n2 n1 , u3 u2 , , uk uk 1 u2 u1 , y3 y2 , , yk yk 1 y2 y1
a b 2
单个反射球面成像
1 1 2 l l r f f r 2
b 1
物点位于球心时
a 1
g 1 b
g 1
9
共轴球面光学系统
b l l
a b 2
g 1 b
J uy uy
球面镜的拉赫不变量
结论
a<0,物体沿光轴移动时,像总是以相反方向移动。 通过球心的光线沿原光路反射。 反射球面镜的焦距等于球面半径的1/2。
3、角放大率g
g
u l n n' l n 1 u l n' nl n' b
n
ag b
n
h
I
nuy nuy J
单折射球面光学系统 拉赫不变量
I
y
U
o
U
r
l'
y
-l
7
共轴球面光学系统
结论:
1.
b是有符号数,具体表现为
成像正倒:当b>0时,表明y’、y同号,成正像;否则,成倒像。 成像大小:当|b|=1时,表明|y’|=|y|,像、物大小一致;|b|>1时, 表明|y’|>|y|,成放大的像;反之,成缩小的像。 成像虚实:当b>0时,表明l’、l同号,物像同侧,虚实相反;否 则,物像异侧,虚实相同。
共轴球面光学系统
§2.4
共轴球面系统的成像
11
1. 过渡公式
共轴球面光学系统
, n3 n2 , , nk nk 1 n2 n1 , u3 u2 , , uk uk 1 u2 u1 , y3 y2 , , yk yk 1 y2 y1
a b 2
单个反射球面成像
1 1 2 l l r f f r 2
b 1
物点位于球心时
a 1
g 1 b
g 1
9
共轴球面光学系统
b l l
a b 2
g 1 b
J uy uy
球面镜的拉赫不变量
结论
a<0,物体沿光轴移动时,像总是以相反方向移动。 通过球心的光线沿原光路反射。 反射球面镜的焦距等于球面半径的1/2。
3、角放大率g
g
u l n n' l n 1 u l n' nl n' b
n
ag b
n
h
I
nuy nuy J
单折射球面光学系统 拉赫不变量
I
y
U
o
U
r
l'
y
-l
7
共轴球面光学系统
结论:
1.
b是有符号数,具体表现为
成像正倒:当b>0时,表明y’、y同号,成正像;否则,成倒像。 成像大小:当|b|=1时,表明|y’|=|y|,像、物大小一致;|b|>1时, 表明|y’|>|y|,成放大的像;反之,成缩小的像。 成像虚实:当b>0时,表明l’、l同号,物像同侧,虚实相反;否 则,物像异侧,虚实相同。
球面和共轴球面系统培训课件
物体位于有限 远处
三角形AEC中应用正弦定律有: sin I sin(U )
rL
r
由此推出入射角I公式:sin I L r sinU r
再由折射定律可以求得折射角I '的公式:sin I ' n sin I n'
由图可知:=U I U ' I ', 所以有:U ' U I I '
在三角形A ' EC使用正弦定律得: sin I ' sinU '
L ' r
r
则像方截距为: L ' r r sin I ' sinU '
2.1.2 实际光线经过单个折射球面 旳光路计算公式
当物在无限远时, L = −∞,设一条光 线平行于光轴入射,入射高度为,则 有:
物体位于无限远 处
2.1.2 实际光线经过单个折射球面 旳光路计算公式
❖ 由上面提供旳公式,我们能够由已知旳L和U求出L’和 U’。
❖ 1)求高斯像面旳位置; ❖ 2)在平面上刻十字,问其共轭像在什么位
置;
❖ 3)当入射高度为h=10mm,问光线旳像方 截距是多少?和高斯像面相比相差多少? 阐明什么问题?
2.3 共轴球面系统
单个折射球面不能作为一种基本成像元件 (反射镜例外,能够单面成像),基本成像元件 是至少两个球面或非球面所构成旳透镜。大部分 透镜都由球面构成,加工以便,成本降低。
❖ 课后习题: 2.2、2.3、2.4、2.5、2.6、2.7、2.8、
2.9 。
2、
n ' u '- nu n ' n h
r
该公式表达近轴光折射前后旳孔径角u和u’之间旳关系。
三角形AEC中应用正弦定律有: sin I sin(U )
rL
r
由此推出入射角I公式:sin I L r sinU r
再由折射定律可以求得折射角I '的公式:sin I ' n sin I n'
由图可知:=U I U ' I ', 所以有:U ' U I I '
在三角形A ' EC使用正弦定律得: sin I ' sinU '
L ' r
r
则像方截距为: L ' r r sin I ' sinU '
2.1.2 实际光线经过单个折射球面 旳光路计算公式
当物在无限远时, L = −∞,设一条光 线平行于光轴入射,入射高度为,则 有:
物体位于无限远 处
2.1.2 实际光线经过单个折射球面 旳光路计算公式
❖ 由上面提供旳公式,我们能够由已知旳L和U求出L’和 U’。
❖ 1)求高斯像面旳位置; ❖ 2)在平面上刻十字,问其共轭像在什么位
置;
❖ 3)当入射高度为h=10mm,问光线旳像方 截距是多少?和高斯像面相比相差多少? 阐明什么问题?
2.3 共轴球面系统
单个折射球面不能作为一种基本成像元件 (反射镜例外,能够单面成像),基本成像元件 是至少两个球面或非球面所构成旳透镜。大部分 透镜都由球面构成,加工以便,成本降低。
❖ 课后习题: 2.2、2.3、2.4、2.5、2.6、2.7、2.8、
2.9 。
2、
n ' u '- nu n ' n h
r
该公式表达近轴光折射前后旳孔径角u和u’之间旳关系。
第二章球面和共轴球面系统分析
要讨论成像规律,即像的虚实,成像的位置、正倒和大 小问题,必须计算出光线的走向,所以我们先讨论计算公式。 光线经过单个折射球面的情况如图所示。 包含光轴和物点的平面称为含轴面(纸面)或子午面。 计算的目的:光从何处来,经何处到哪里去(由此得出由物 点发出的光线经过系统后能否交到一点完善成像)?
首要问题:用什么量(怎样)来决定光线在空间中的位置?
对AEC应用正弦定理得 L r r Lr 即 sin I sin U 可求出I sin I sin ( U) r n 据折射定律 sin I ` sin I 可求出I ` n` 对AEC和A`EC应用外角定理 U I U ` I ` U ` U I I ` 可得到U ` sin I ' sin U ' sin I 在A ' EC中 ,利用正弦定律 L ' rr L ' r r sin U
从光轴起算,光轴转向光线(按锐角方向), 顺时针为正,逆时针为负。
入射角、折射角 从光线起算,光线转向法线(按锐角方向), 顺时针为正,逆时针为负。 ③ 光轴与法线的夹角(如) 从光轴起算,光轴转向法线(按锐角方向), 顺时针为正,逆时针为负。
二、实际光线经过单个折射球面的光路计算
已知:折射球面曲率半径r,介质折射率n和n′,及物方坐标L和U。 求:像方L ′和 U ′。
共轴球面系统由许多单个球面构成,当计算出第一面后, 其折射光线就是第二面的入射光线。
U 2 U1; L2 L1 d1
再由相邻两折射球面间的关系,求出下一个球面的折 射光线。
第四节 球面反射镜成像
n n n n 成像公式: l l r
n n
1 1 2 l l r
首要问题:用什么量(怎样)来决定光线在空间中的位置?
对AEC应用正弦定理得 L r r Lr 即 sin I sin U 可求出I sin I sin ( U) r n 据折射定律 sin I ` sin I 可求出I ` n` 对AEC和A`EC应用外角定理 U I U ` I ` U ` U I I ` 可得到U ` sin I ' sin U ' sin I 在A ' EC中 ,利用正弦定律 L ' rr L ' r r sin U
从光轴起算,光轴转向光线(按锐角方向), 顺时针为正,逆时针为负。
入射角、折射角 从光线起算,光线转向法线(按锐角方向), 顺时针为正,逆时针为负。 ③ 光轴与法线的夹角(如) 从光轴起算,光轴转向法线(按锐角方向), 顺时针为正,逆时针为负。
二、实际光线经过单个折射球面的光路计算
已知:折射球面曲率半径r,介质折射率n和n′,及物方坐标L和U。 求:像方L ′和 U ′。
共轴球面系统由许多单个球面构成,当计算出第一面后, 其折射光线就是第二面的入射光线。
U 2 U1; L2 L1 d1
再由相邻两折射球面间的关系,求出下一个球面的折 射光线。
第四节 球面反射镜成像
n n n n 成像公式: l l r
n n
1 1 2 l l r
工程光学 章节2 球面系统
3. 光路计算是根据给定的光学系统,由物求像或由像 求物的过程。 4. 光路计算是根据几何光学的基本定律利用成像光路 图建立起的物象计算式。
光线经球面折射时的光路计算
要讨论成像规律,即像的虚实,成像的位置、正倒和大小问题,必须 计算出光线的走向,所以我们先讨论计算公式。 包含光轴和物点的平面称为含轴面(纸面)或子午面。
第一种情况
求光束经过两次成像后的会聚,图 已知系统 r1 R r2 R n1 1 n2 1.5 n3 1
•第一次成像
n1 1
n'1 1.5
r R
l1
1.5 1 1 .5 1 l '1 R
l1 '求得
A′ -Y′ B′
规则: 以球面的顶点为原点 2-1 沿轴量向右取正,向左取负 垂轴量向上取正,向下取负
单个球面的折射光路
B Y
A -U -L n E I
h I′ O C U′ r L′
n′
A′ -Y′ B′
2-1
角度的符号
• 角度量:U、U′、I、 I ′、φ
规则: 角度正切值为正时该角度为正,反 之为负
第二章 共轴球面光学系统
第一节 光路计算
• • • • 一、概述 二、符号规则 三、单个球面的成像计算 四、共轴球面的成像计算
一、概述
1. 绝大多数光学系统由球面、平面或非球面组成,如 果各曲面的曲率中心在一条直线上,则称该光学系 统为共轴光学系统,该直线为光轴。
2. 非球面, 如抛物面、椭球面等对某些位置等光程的 像质不错, 但加工检验有一定困难。因此,后面的讨 论主要是由球面和平面组成的光学系统。
• 实际光线的光路计算
严格按照几何光学基本定律的光线计算,这类 光线称为实际光线
光线经球面折射时的光路计算
要讨论成像规律,即像的虚实,成像的位置、正倒和大小问题,必须 计算出光线的走向,所以我们先讨论计算公式。 包含光轴和物点的平面称为含轴面(纸面)或子午面。
第一种情况
求光束经过两次成像后的会聚,图 已知系统 r1 R r2 R n1 1 n2 1.5 n3 1
•第一次成像
n1 1
n'1 1.5
r R
l1
1.5 1 1 .5 1 l '1 R
l1 '求得
A′ -Y′ B′
规则: 以球面的顶点为原点 2-1 沿轴量向右取正,向左取负 垂轴量向上取正,向下取负
单个球面的折射光路
B Y
A -U -L n E I
h I′ O C U′ r L′
n′
A′ -Y′ B′
2-1
角度的符号
• 角度量:U、U′、I、 I ′、φ
规则: 角度正切值为正时该角度为正,反 之为负
第二章 共轴球面光学系统
第一节 光路计算
• • • • 一、概述 二、符号规则 三、单个球面的成像计算 四、共轴球面的成像计算
一、概述
1. 绝大多数光学系统由球面、平面或非球面组成,如 果各曲面的曲率中心在一条直线上,则称该光学系 统为共轴光学系统,该直线为光轴。
2. 非球面, 如抛物面、椭球面等对某些位置等光程的 像质不错, 但加工检验有一定困难。因此,后面的讨 论主要是由球面和平面组成的光学系统。
• 实际光线的光路计算
严格按照几何光学基本定律的光线计算,这类 光线称为实际光线
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
共轴球面光学系统
2. 成像放大率 单折射球面
y′ nl′ = β = y n ′l
dl′ nl′2 n′ α = β = = 2 dl n ′l n
u′ l n 1 γ = = = u l′ n' β
2
共轴球面系统
y'k y'1 y'2 y'k = β 1β 2 β k = β= y1 y1 y 2 y k
U′
y′
L′
1
共轴球面光学系统
2、符号规则 、
(一)光线行进方向:从左向右。 光线行进方向:从左向右。 线量符号: (二)线量符号: (1)沿轴线段:以球面顶点 为原点,与光线行进方向相 沿轴线段: 为原点, 沿轴线段 以球面顶点O为原点 同者为正,与光线行进方向相反者为负。 同者为正,与光线行进方向相反者为负。 (2)垂轴线段:以光轴为界,在光轴之上为正,在光轴之 垂轴线段 以光轴为界,在光轴之上为正, 垂轴线 下为负。 下为负。 角度符号(一律以锐角来衡量): (三)角度符号(一律以锐角来衡量): 光线与光轴的夹角 光轴转向光线,顺时针为正, 的夹角: (1) 光线与光轴的夹角:光轴转向光线,顺时针为正,逆 时针为负。 时针为负。 光线与法线的夹角 光线转向法线,顺时针为正, 的夹角: (2) 光线与法线的夹角:光线转向法线,顺时针为正,逆 时针为负。 时针为负。 光轴与法线的夹角 光轴转向法线,顺时针为正, 的夹角: (3) 光轴与法线的夹角:光轴转向法线,顺时针为正,逆 时针为负。 时针为负。
11
1. 过渡公式
共轴球面光学系统
′ ′ ′ n2 = n1 , n3 = n2 , , nk = nk 1 ′ ′ ′ u2 = u1 , u3 = u2 , , uk = uk 1 ′ ′ ′ y 2 = y1 , y 3 = y 2 , , y k = y k 1
′ ′ ′ U 2 = U 1 ,U 3 = U 2 , ,U k = U k 1 ′ ′ ′ L2 = L1 d 1 , L3 = L2 d 2 , , Lk = Lk 1 d k 1
I
h
n′
y
U
o
r
I′
U′
y′
-L
L′
物高y像高y 代数值符号相反 代数值符号相反——倒像; 倒像; 物高y像高y’代数值符号相反 倒像 符号相同——正像; 正像; 符号相同 正像
4、光路图中符号标注: 、光路图中符号标注:
图中标注几何量为正。 图中标注几何量为正。
3
共轴球面光学系统
§2.2 物体经单个折射球面的成像
5
共轴球面光学系统
二、近轴区域的物像关系
l ′u′ = lu = h
1 1 1 1 ′( ) = n( ) = Q n r l′ r l h n′u′ nu = ( n′ n ) r n′ n n′ n = l′ l r
y
n′ n 光焦度 = r
n
I
h
n′
n′ n = l′ ∞ n′ n = = f' f
球面镜的拉赫不变量
结论
α<0,物体沿光轴移动时,像总是以相反方向移动。 ,物体沿光轴移动时,像总是以相反方向移动。 通过球心的光线沿原光路反射。 通过球心的光线沿原光路反射。 反射球面镜的焦距等于球面半径的1/2。 反射球面镜的焦距等于球面半径的 。
10
共轴球面光学系统
§2.4 共轴球面系统的成像
2.
因α恒为正,故当物点沿轴向移动时,其像点沿光轴同 恒为正,故当物点沿轴向移动时, 向移动;且因α 故空间物体成像时要变形, 向移动;且因α ≠ β,故空间物体成像时要变形,例如一 正方体成像后将不再是正方体。 正方体成像后将不再是正方体。 γ只与共轭点的位置有关,而与光线的孔径角无关。 只与共轭点的位置有关,而与光线的孔径角无关。
n′ n = ∞ l
U
o
I′
U′
r
l'
y′
-l
共轴球面光学系统
三、近轴区域的物像放大率
1、垂轴放大率β 垂轴放大率β
y′ nu nl ′ β = = = ′ u' y n n′l
2
dl ′ nl ′2 n′ 轴向放大率α 2、轴向放大率α α = β = = 2 dl n ′l n
3、角放大率γ 角放大率γ
' dl 'k dl 1 dl '2 dl 'k α= = = α 1α 2 α k dl 1 dl 1 dl 2 dl k
u'k u'1 u'2 u'k γ = = = γ 1γ 2 γ k u 1 u1 u 2 u k
αγ = β
nuy = n ′ u ′ y ′ = J
13
共轴球面光学系统
§2 共轴球面光学系统 §2.1 符号规则
1、常用符号: 、常用符号:
n 、n’ ——折射率 折射率
n
y
I
h
I′
n′
r ——球面的曲率半径 球面的曲率半径 U y—— 物体的大小 o r y’—— 像的大小 I——光线的入射角 光线的入射角 L I’——光线的折射角 光线的折射角 L——物体到折射面或反射面的距离(物方截距) 物体到折射面或反射面的距离( 物体到折射面或反射面的距离 物方截距) L’ ——折射面或反射面到像的距离(像方截距) 折射面或反射面到像的距离( 折射面或反射面到像的距离 像方截距) U——入射光线和光轴倾斜的角度(物方孔径角) 入射光线和光轴倾斜的角度( 入射光线和光轴倾斜的角度 物方孔径角) U’ ——出射光线和光轴倾斜的角度(像方孔径角) 出射光线和光轴倾斜的角度( 出射光线和光轴倾斜的角度 像方孔径角) ——光轴与法线的夹角 光轴与法线的夹角
4
共轴球面光学系统
sin I = ( L r ) sin I ′ = n sin I n′
sin U r
i =
U ′ = U + I I′
lr u r n l′ r ′= i i = u′ n′ r
u′ = u + i i′
sin I ′ L′ = r ( 1 + ) sin U ′
n(l r ) i ′ = r 1 + l′ = r( 1 + ) n' l n (l r ) u′
一、单折射球面成像的光路计算
n
y
U
I
h
n′
o
I′
U′
I E
h
I′
r
L′
sin U sin I = ( L r ) r n sin I ′ = sin I n′
U ′ = U + I I′
y′
o
U′
A’
-L
sinI = h r i=h r h = l ′u′ = lu
L′ = r ( 1 +
sin I ′ ) sin U ′
2
3、符号规则的意义: 、符号规则的意义:
清楚地描述物像的虚实和正倒: 清楚地描述物像的虚实和正倒:
n
共轴球面光学系统
物在左:负物距 实物; 物在左:负物距——实物; 实物 正物距——虚物; 虚物; 右:正物距 虚物 像在右:正像距 实像; 像在右:正像距——实像; 实像 左:负像距——虚像; 负像距 虚像; 虚像
8
3.
共轴球面光学系统
§2.3 单个反射球面成像
1、物像位置公式 、 2、成像放大率 、
β = l′ l
α = β 2
1 1 2 + = ′ l l r
f′= f =
r 2
β = 1
物点位于球心时
α = 1
γ = 1 β
γ =1
9
共轴球面光学系统
β = l′ l
α = β 2
γ = 1 β
J = uy = u′y′
′ ′ ′ l 2 = l 1 d 1 , l 3 = l 2 d 2 , , l k = l k 1 d k 1 ′ h2 = h1 d 1 u1 , h3 = h2 d 2 u′ , , hk = hk 1 d k 1 u′ 1 2 k ′ n1 u1 y1 = n2 u2 y 2 = = nk uk yk = n′ u′ yk = J k k
γ =
u′ l n n' l n 1 = = = u l ′ n' n l ′ n' β
n
αγ = β
n′
h
nuy = n′u′y′ = J
单折射球面光学系统 拉赫不变量
I
y
U
I′
U′
o
-l
r
l'
y′
7
共轴球面光学系统
结论: 结论:
1. β是有符号数,具体表现为 是有符号数,
成像正倒: 同号, 成像正倒:当β>0时,表明 、y同号,成正像;否则,成倒像。 时 表明y’ 同号 成正像;否则,成倒像。 成像大小: β = 时 表明|y’|=|y|,像、物大小一致;|β|>1时, 物大小一致; β 时 成像大小:当|β|=1时,表明 , 表明|y’|>|y|,成放大的像;反之,成缩小的像。 表明 ,成放大的像;反之,成缩小的像。 成像虚实:当β>0时,表明 、l同号,物像同侧,虚实相反;否 同号, 成像虚实: 时 表明l’ 同号 物像同侧,虚实相反; 物像异侧,虚实相同。 则,物像异侧,虚实相同。 当物体位于不同的位置时, 不同。 当物体位于不同的位置时, β不同。
共轴球面光学系统
2. 成像放大率 单折射球面
y′ nl′ = β = y n ′l
dl′ nl′2 n′ α = β = = 2 dl n ′l n
u′ l n 1 γ = = = u l′ n' β
2
共轴球面系统
y'k y'1 y'2 y'k = β 1β 2 β k = β= y1 y1 y 2 y k
U′
y′
L′
1
共轴球面光学系统
2、符号规则 、
(一)光线行进方向:从左向右。 光线行进方向:从左向右。 线量符号: (二)线量符号: (1)沿轴线段:以球面顶点 为原点,与光线行进方向相 沿轴线段: 为原点, 沿轴线段 以球面顶点O为原点 同者为正,与光线行进方向相反者为负。 同者为正,与光线行进方向相反者为负。 (2)垂轴线段:以光轴为界,在光轴之上为正,在光轴之 垂轴线段 以光轴为界,在光轴之上为正, 垂轴线 下为负。 下为负。 角度符号(一律以锐角来衡量): (三)角度符号(一律以锐角来衡量): 光线与光轴的夹角 光轴转向光线,顺时针为正, 的夹角: (1) 光线与光轴的夹角:光轴转向光线,顺时针为正,逆 时针为负。 时针为负。 光线与法线的夹角 光线转向法线,顺时针为正, 的夹角: (2) 光线与法线的夹角:光线转向法线,顺时针为正,逆 时针为负。 时针为负。 光轴与法线的夹角 光轴转向法线,顺时针为正, 的夹角: (3) 光轴与法线的夹角:光轴转向法线,顺时针为正,逆 时针为负。 时针为负。
11
1. 过渡公式
共轴球面光学系统
′ ′ ′ n2 = n1 , n3 = n2 , , nk = nk 1 ′ ′ ′ u2 = u1 , u3 = u2 , , uk = uk 1 ′ ′ ′ y 2 = y1 , y 3 = y 2 , , y k = y k 1
′ ′ ′ U 2 = U 1 ,U 3 = U 2 , ,U k = U k 1 ′ ′ ′ L2 = L1 d 1 , L3 = L2 d 2 , , Lk = Lk 1 d k 1
I
h
n′
y
U
o
r
I′
U′
y′
-L
L′
物高y像高y 代数值符号相反 代数值符号相反——倒像; 倒像; 物高y像高y’代数值符号相反 倒像 符号相同——正像; 正像; 符号相同 正像
4、光路图中符号标注: 、光路图中符号标注:
图中标注几何量为正。 图中标注几何量为正。
3
共轴球面光学系统
§2.2 物体经单个折射球面的成像
5
共轴球面光学系统
二、近轴区域的物像关系
l ′u′ = lu = h
1 1 1 1 ′( ) = n( ) = Q n r l′ r l h n′u′ nu = ( n′ n ) r n′ n n′ n = l′ l r
y
n′ n 光焦度 = r
n
I
h
n′
n′ n = l′ ∞ n′ n = = f' f
球面镜的拉赫不变量
结论
α<0,物体沿光轴移动时,像总是以相反方向移动。 ,物体沿光轴移动时,像总是以相反方向移动。 通过球心的光线沿原光路反射。 通过球心的光线沿原光路反射。 反射球面镜的焦距等于球面半径的1/2。 反射球面镜的焦距等于球面半径的 。
10
共轴球面光学系统
§2.4 共轴球面系统的成像
2.
因α恒为正,故当物点沿轴向移动时,其像点沿光轴同 恒为正,故当物点沿轴向移动时, 向移动;且因α 故空间物体成像时要变形, 向移动;且因α ≠ β,故空间物体成像时要变形,例如一 正方体成像后将不再是正方体。 正方体成像后将不再是正方体。 γ只与共轭点的位置有关,而与光线的孔径角无关。 只与共轭点的位置有关,而与光线的孔径角无关。
n′ n = ∞ l
U
o
I′
U′
r
l'
y′
-l
共轴球面光学系统
三、近轴区域的物像放大率
1、垂轴放大率β 垂轴放大率β
y′ nu nl ′ β = = = ′ u' y n n′l
2
dl ′ nl ′2 n′ 轴向放大率α 2、轴向放大率α α = β = = 2 dl n ′l n
3、角放大率γ 角放大率γ
' dl 'k dl 1 dl '2 dl 'k α= = = α 1α 2 α k dl 1 dl 1 dl 2 dl k
u'k u'1 u'2 u'k γ = = = γ 1γ 2 γ k u 1 u1 u 2 u k
αγ = β
nuy = n ′ u ′ y ′ = J
13
共轴球面光学系统
§2 共轴球面光学系统 §2.1 符号规则
1、常用符号: 、常用符号:
n 、n’ ——折射率 折射率
n
y
I
h
I′
n′
r ——球面的曲率半径 球面的曲率半径 U y—— 物体的大小 o r y’—— 像的大小 I——光线的入射角 光线的入射角 L I’——光线的折射角 光线的折射角 L——物体到折射面或反射面的距离(物方截距) 物体到折射面或反射面的距离( 物体到折射面或反射面的距离 物方截距) L’ ——折射面或反射面到像的距离(像方截距) 折射面或反射面到像的距离( 折射面或反射面到像的距离 像方截距) U——入射光线和光轴倾斜的角度(物方孔径角) 入射光线和光轴倾斜的角度( 入射光线和光轴倾斜的角度 物方孔径角) U’ ——出射光线和光轴倾斜的角度(像方孔径角) 出射光线和光轴倾斜的角度( 出射光线和光轴倾斜的角度 像方孔径角) ——光轴与法线的夹角 光轴与法线的夹角
4
共轴球面光学系统
sin I = ( L r ) sin I ′ = n sin I n′
sin U r
i =
U ′ = U + I I′
lr u r n l′ r ′= i i = u′ n′ r
u′ = u + i i′
sin I ′ L′ = r ( 1 + ) sin U ′
n(l r ) i ′ = r 1 + l′ = r( 1 + ) n' l n (l r ) u′
一、单折射球面成像的光路计算
n
y
U
I
h
n′
o
I′
U′
I E
h
I′
r
L′
sin U sin I = ( L r ) r n sin I ′ = sin I n′
U ′ = U + I I′
y′
o
U′
A’
-L
sinI = h r i=h r h = l ′u′ = lu
L′ = r ( 1 +
sin I ′ ) sin U ′
2
3、符号规则的意义: 、符号规则的意义:
清楚地描述物像的虚实和正倒: 清楚地描述物像的虚实和正倒:
n
共轴球面光学系统
物在左:负物距 实物; 物在左:负物距——实物; 实物 正物距——虚物; 虚物; 右:正物距 虚物 像在右:正像距 实像; 像在右:正像距——实像; 实像 左:负像距——虚像; 负像距 虚像; 虚像
8
3.
共轴球面光学系统
§2.3 单个反射球面成像
1、物像位置公式 、 2、成像放大率 、
β = l′ l
α = β 2
1 1 2 + = ′ l l r
f′= f =
r 2
β = 1
物点位于球心时
α = 1
γ = 1 β
γ =1
9
共轴球面光学系统
β = l′ l
α = β 2
γ = 1 β
J = uy = u′y′
′ ′ ′ l 2 = l 1 d 1 , l 3 = l 2 d 2 , , l k = l k 1 d k 1 ′ h2 = h1 d 1 u1 , h3 = h2 d 2 u′ , , hk = hk 1 d k 1 u′ 1 2 k ′ n1 u1 y1 = n2 u2 y 2 = = nk uk yk = n′ u′ yk = J k k
γ =
u′ l n n' l n 1 = = = u l ′ n' n l ′ n' β
n
αγ = β
n′
h
nuy = n′u′y′ = J
单折射球面光学系统 拉赫不变量
I
y
U
I′
U′
o
-l
r
l'
y′
7
共轴球面光学系统
结论: 结论:
1. β是有符号数,具体表现为 是有符号数,
成像正倒: 同号, 成像正倒:当β>0时,表明 、y同号,成正像;否则,成倒像。 时 表明y’ 同号 成正像;否则,成倒像。 成像大小: β = 时 表明|y’|=|y|,像、物大小一致;|β|>1时, 物大小一致; β 时 成像大小:当|β|=1时,表明 , 表明|y’|>|y|,成放大的像;反之,成缩小的像。 表明 ,成放大的像;反之,成缩小的像。 成像虚实:当β>0时,表明 、l同号,物像同侧,虚实相反;否 同号, 成像虚实: 时 表明l’ 同号 物像同侧,虚实相反; 物像异侧,虚实相同。 则,物像异侧,虚实相同。 当物体位于不同的位置时, 不同。 当物体位于不同的位置时, β不同。