工业以太网的控制系统及其应用层协议的设计
工业以太网通信协议研究及应用

工业以太网通信协议研究及应用摘要:在绝大多数工业控制通信方面都是采用现场总线技术方式来实现的。
但长期以来现场总线种类繁多、同时又没有统一标准而导致互不兼容,使得系统集成和信息集成面临着巨大挑战,所以引入了应用广泛、高速率、低成本的以太网技术。
但以太网的可靠性和实时性比较差,难以适应工业控制的要求,故相关组织对以太网进行了一些扩展,称为工业以太网。
随着工业4.0的发展,相信工业以太网技术将越来越重要。
本文就常见工业以太网通信协议简介及应用作出阐述。
关键词:现场总线技术、工业以太网、EtherCat、Ethernet/IP、ProfiNet、Modbus/TCP、Ethernet/PowerLink、MechatroLink1常见工业以太网通信协议1.1、Modbus/TCPModbus/TCP是用于控制和管理自动化设备的Modbus系列通讯协议的派生产品。
由此可见,它覆盖了使用TCP/IP协议的Intranet企业内部网和Internet互联网环境中Modbus报文的用途。
该协议的最常见用途是为例如I/O、PLC模块以及连接其它简单域总线或I/O模块的网关服务的。
Modbus/TCP协议是作为一种实际的自动化标准发行的。
既然Modbus已经广为人知,该规范只将别处没有收录的少量信息列入其中。
然而该规范力图阐明Modbus中哪种功能对于普通自动化设备的互用性有价值,哪些部分是Modbus作为可编程的协议交替用于PLC的多余部分。
Modbus/TCP 在美国比较流行,它由两部分组成,即IDA分散式控制系统的结构与Modbus/TCP 的信息结构的结合。
Modbus/TCP定义了一个简单的开放式又广泛应用的传输协议网络用于主从通讯方式。
1.2.、Ethernet/IPEthernet/IP是一个面向工业自动化应用的工业应用层协议,这里的IP表示Industrial-Protocal。
它建立在标准UDP/IP与TCP/IP协议之上,利用固定的以太网硬件和软件,为配置、访问和控制工业自动化设备定义了一个应用层协议。
综合设计 任务书7 《基于工业以太网的控制系统设计与实现》
设计题目:基于工业以太网的控制系统设计与实现
1.设计任务:
本设计的主要任务是利用工业控制网络实验室的设备,设计并实现基于工业以太网的控制系统。
此系统的基本模式为对等模式,每一站点可以选择该实验设备的任一模块作为受控模块,站点个数为3个(含3个)以上一样。
采用计算机作为主站,通过在计算机上发出指令,使从机上的模块可以真确运行。
2.设计要求:
(1)从站采用配备S7-200系列的PLC,被控端采用实验设备所提供的模块。
可选模块包括液位控制系统,交通灯控制系统,变频调速系统,立体仓库系统,电梯运行系统,工业机械手等模块。
(2)主站采用安装有WINCC系统的PC机。
(3)要求参照模块使用说明,编写PLC的控制程序。
(4)调试工业以太网网络使之正常运行。
(5)使用WINCC编写上位机控制程序,要求多个控制程序可以相互切换,要求控制程序能正确运行。
(6)设计报告书需参照《徐州工程学院毕业论文(设计)》模板规定的格式撰写。
要求内容翔实连贯,数据准确可靠,突出技术细节。
3. 设计计划安排:
4.参考资料
[1] 工业自动化网络实验指导书
[2] 现场总线及工业控制网络技术
[3] WINCC组态软件教程
[4] 电气控制与PLC教程
[5] 电机与拖动教程
[6]《自动控制原理》教材
[7] 自行查找的资料。
工业控制网络与人机界面组态技术第八章+工业以太网技术与应用

3.CIP 封装
封装数据包包头的格式如图4.52 所示,包 头长度为24B,其有效数据段的长度为0~65511B。 数据按照规定的格式封装好后,作为TCP 或UDP 报文中的数据段传输。
图4.52 封装数据包包头格式
3.CIP 封装
在命令域,可能的命令有:
●NOP:空操作命令,无论是会话发起者还是 目标都可能发送。接受者应该忽略报文中包含的任 何数据,并且不回复。
而UDP 报文只包含实时数据,其含义在连接建 立时已经定义好。通过UDP 来传输隐式报文,报文 效率较高,通信实时性较好,而且由于UDP 报文较 短,传输所需要的时间可观测性就较强,通信确定 性也相对较高。而UDP 报文传输带来的可靠性低下 的问题由CIP 解决,即如果发生报文丢失或差错的 情况下,由CIP 通知发送节点重新发送报文。
第六章 工业以太网技术与应用
近几年来,随着互联网技术的普及与推广,以太网得 到了飞速的发展,特别是以太网通信速率的提高、以太网 交换技术的发展,给以太网的非确定性问题的解决带来了 新的契机。
首先,以太网通信速率的一再提高,从10M到100M到 1000M甚至10Gbps,在相同通信量的条件下,通信速率的 提高意味着网络负荷的减轻和碰撞的减少,也就意味着确 定性的提高;
些必要的信息组成报文,发送到网络上,报文接受 节点根据报文的MID来判断报文是不是发给自己的, 如果符合接受条件,就接受该报文。
◆基于生产者/消费者模型的网络除了支持点对
点外还支持组播通信,这样通信效率就会更高,也 因而成为其优点之一。
CIP的主要特点
多播通信与点对点通信相比的优点: 1) 把同样的报文发给多个节点,提高了效率 2) 在多播通信中,每个节点接受到报文的时间不受
profinet协议体系结构
profinet协议体系结构
Profinet是一种用于工业自动化领域的通信协议,它基于以太网技术,提供了实时性和高性能的特性。
Profinet协议体系结构可以分为三个主要层级,应用层、传输层和数据链路层。
在应用层,Profinet协议使用了标准的TCP/IP协议栈,这使得它能够与现有的以太网网络兼容,并且能够利用现有的网络基础设施。
在这一层级,Profinet定义了用于工业自动化控制和数据交换的应用协议,包括实时数据交换、配置和诊断。
传输层是Profinet协议的核心,它负责实现实时通信和数据交换。
在这一层级,Profinet使用了基于以太网的实时通信协议(RT-ETH)来实现对实时数据的传输。
RT-ETH允许周期性和非周期性数据的实时传输,同时保证了通信的可靠性和实时性。
数据链路层是Profinet协议的最底层,它定义了数据帧的格式和传输方式。
Profinet使用以太网作为物理传输介质,并在数据链路层上实现了IEEE 802.3标准。
此外,Profinet还引入了一些工业以太网的特性,如同步和实时性能的增强,以满足工业自动化领域对实时通信的需求。
总的来说,Profinet协议体系结构充分考虑了工业自动化领域对实时性、可靠性和高性能通信的需求,通过在应用层、传输层和数据链路层的设计上进行综合考虑,实现了在以太网上进行工业自动化控制和数据交换的要求。
这种体系结构的设计使得Profinet成为了工业自动化领域中一种被广泛采用的通信协议。
ethercat电路原理

ethercat电路原理EtherCAT(以太网控制自动化技术)是一种基于以太网的工业以太网技术,用于实现实时性要求高的工业控制应用。
它的电路原理涉及到以太网物理层、数据链路层和应用层的设计。
在EtherCAT 电路中,主要包括以下几个部分:1. 物理层:EtherCAT 采用了标准的以太网物理层,支持100BASE-TX 和1000BASE-T 以太网标准。
物理层负责将数据在以太网链路上进行传输。
2. 数据链路层:EtherCAT 在数据链路层使用了一种特殊的协议,称为EtherCAT 协议。
该协议采用了主从结构,主站负责发送数据帧,从站负责接收和处理数据。
EtherCAT 协议通过以太网数据帧的扩展字段来传输实时数据和控制信息。
3. 应用层:EtherCAT 应用层包括设备描述文件(Device Description File,DDF)和过程数据对象(Process Data Object,PDO)。
DDF 用于描述从站设备的特性和功能,PDO 用于传输实时的过程数据。
EtherCAT 电路的工作原理是:主站发送数据帧到从站,从站接收数据并根据DDF 进行解析和处理。
如果数据帧中包含PDO 数据,从站将实时数据传输给主站。
主站可以通过轮询或事件触发的方式与从站进行通信。
EtherCAT 的实时性是通过使用特殊的数据链路层协议和硬件实现的。
它采用了时间同步机制,保证了数据传输的确定性和实时性。
需要注意的是,以上是EtherCAT 电路的基本原理,实际的EtherCAT 系统还涉及到更多的细节和功能,如网络拓扑、从站配置、错误处理等。
如果你需要更深入了解EtherCAT 电路原理,建议参考相关的技术文档和资料。
工业以太网简介

,其中 为整
以太网
离散的控制器
图 2.2 延时合并的网络控制系统结构
2.3.2 节点的驱动方式的选择 网络控制系统有一个很重要的概念:节点的驱动方式,其他控制系统中不 存在这个概念。一般节点的驱动方式分为两种:事件驱动和时间驱动。时间驱
动就是系统节点按照事先规定的时间间隔处理相应的任务,例如定时采样。而 事件驱动是指当系统节点收到数据时,开始处理相应的任务。不同的驱动方 式,系统的数学模型也不一致,即使采用相同的控制算法,控制效果也不同。 传感器一般都采用时间驱动方式 ,执行器和控制器的驱动方式有待讨 论。 当控制器和执行器有一个为时间驱动时,便存在与传感器时间同步的问 题。网络控制系统的节点有可能分布在一个较大的物理空间,各个节点很难保 持精确的时间同步。系统应当尽可能避免使用时间同步。 1、执行器采用时间驱动方式 传统的离散控制算法,都是基于 Z 变换的,也就是等周期控制,执行器节 点采用时间驱动,每个控制量的执行时间为定值(采样周期) ,与算法设计的一 致。当延时小于一个采样周期时,系统总的延时为常数,有利于控制算法的设 计与分析。但执行器节点采用时间驱动会增大反馈通道的时延,当前控制量无 法及时作用到被控对象,不可避免的降低闭环系统的性能。 2、执行器采用事件驱动方式 执行器节点采用事件驱动,可以减小反馈通道的时延,使得控制量能够尽 快的作用于被控对象,有利于改善系统的性能。在一个周期内执行器可能会收 到多个控制信号,或者几个周期内执行器才收到一个控制信号,每个控制量的 执行时间不是定值(采样周期) ,与算法设计不一致,可能使控制效果变差,同 时使得系统的数学模型相对要复杂一些,系统的分析也更加困难。 当网络总延时小于一个采样周期时,执行器一般都采用事件驱动方式。 3、控制器采用时间驱动方式 控制器采用时间驱动,就要考虑时间同步问题。 若控制器与传感器的时间同步,当传感器数据传输时延为 Tsc ,则传感器到 控制器的延时为 sc (int(Tsc T ) 1) T , int() 是向零方向取整函数, T 为采样周 期。 若控制器与传感器的时间不同步,设控制器的时间比传感器的时间落后
以太网工业交换机软件架构设计
以太网交换机采用是上海兆越独有的MOS操作系统平台,系统采用分层设计,分为硬件适配层、操作系统和任务接口、IP转发及路由策略管理、路由应用层、业务应用层、系统管理和配置服务。
平台化:抽象的软件体系结构,专为网络设计优化的通讯产品操作平台。
组件化:集成二三层交换技术、QoS服务技术、安全技术等通信要件。
所有业务以组件的形式添加到MOS平台,组件与组件之间通讯采用标准内部接口,保证基于产品应用,可裁剪和伸缩,能快速推出产品。
为多种产品提供一致的网络界面、用户界面、管理界面,提供灵活丰富的应用解决方案。
数据承载网络系统软件,具有冗余、容错、防病毒的功能。
软件的工程开发遵循ISO9001、EN50128、EN50159-1、EN50159-2等相关系列的软件质量及安全保证体系,具有完善的软件文档管理。
MOS平台分管理、控制、支撑、数据四个平面。
管理平面向用户提供平台的配置和管理功能,提供命令行、WEB、SNMP 三种管理方式,可根据产品需要增减。
其中命令行采用类Cisco风格。
MOS平台将控制平面的各功能模块抽象定义统一的接口和数据结构,命令行、WEB、SNMP等管理模块通过统一接口和数据结构,配置管理各功能模块。
采用这种设计,所有模块遵守预先定义好的数据结构和接口,能方便地增加一种新的配置工具,以满足产品多样性,如增加PON设备的CTC及OMCI管理功能。
各管理模块并行执行,采用消息机制,管理各业务功能模块。
数据流图如下所示控制平面SSM:System Service Module,MOS平台微内核,提供基本二、三层服务、接口管理、配置管理、系统服务等;RM(Route Manager):实现OSPF、BGP、IS-IS、RIP、PIM DM/SM 等多种单播和多播路由协议,支持路由迭代、路由策略、ECMP等丰富的路由特性;Service Application:业务应用模块,包括AAA、DHCP、PTP、VRRP、QoS等。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化和智能制造的快速发展,EtherCAT (Ethernet for Control Automation Technology)通信协议因其高带宽、低延迟和易扩展的特性,在嵌入式系统中得到了广泛应用。
本文将详细介绍面向ZYNQ嵌入式平台的EtherCAT通信协议栈的设计与实现过程,通过对其体系结构和功能的全面描述,旨在为相关开发人员提供一定的参考。
二、EtherCAT协议概述EtherCAT是一种实时以太网通信协议,其核心思想是将实时控制任务的数据传输与标准以太网进行无缝集成。
EtherCAT协议通过分布式时钟和状态机机制,实现了对数据的高效、实时传输。
在嵌入式系统中,EtherCAT协议的应用能够显著提高系统的响应速度和数据处理能力。
三、ZYNQ嵌入式平台简介ZYNQ嵌入式平台是一款基于Xilinx FPGA和ARM Cortex-A9处理器的嵌入式系统。
其具有高性能、低功耗的特点,广泛应用于工业控制、医疗设备、智能交通等领域。
在ZYNQ平台上实现EtherCAT协议,能够更好地满足实时性、稳定性和可扩展性的需求。
四、EtherCAT通信协议栈设计1. 整体架构设计EtherCAT通信协议栈的设计包括物理层、数据链路层、网络层和应用层。
其中,物理层负责与硬件设备进行数据传输;数据链路层负责帧的封装与解析;网络层负责数据的路由与转发;应用层则提供丰富的接口供上层应用使用。
2. 详细设计(1)物理层设计:物理层采用标准的以太网物理层芯片,通过MII/GMII接口与ZYNQ平台进行连接。
(2)数据链路层设计:数据链路层负责将上层数据封装成EtherCAT帧,并实现帧的发送与接收。
此外,还需要实现分布式时钟同步机制,以保证数据的实时性。
(3)网络层设计:网络层主要负责数据的路由与转发。
在EtherCAT协议中,网络层需要实现SDO(Service Data Object)访问和PDO(Process Data Object)通信等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7 4一3 0 / 邮局仃阅号 :29 6 6元 年 8 -4
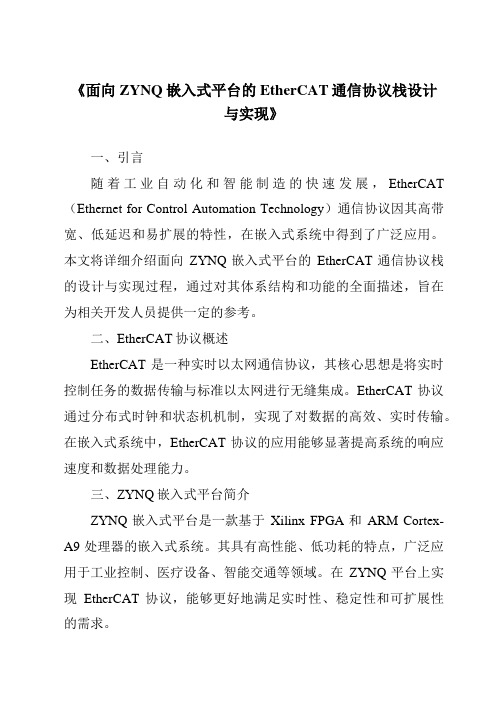
图1 控制系统结构图
2 . 2以太网节点的硬件结构 以太网节点可使现场设备能与监控站相互通信 , 它可对应用层协议进行解析。其硬件结构如图 2 所 示 。 CU 为 三 星 公 司 基 于 A M T M P R 7D I内 核 的
比海 学朱雍杰 王 成 杨新志 大)
Z u oge n ,hn gX zi Y nj WagC e Y n ,i h h, i a n
摘要 : 介绍 了一种运用工业以太网技术的过程控制 系统及其网络应用层协议的设计思想。 控制 系统的网络架构分为两层 ; 以 大网节点的硬件基于A M R 7内核的处理器;软件基于 ulu 嵌入式操作系统;网络的应用层协议 自行定义,由C语言实 c nx i
别与控制, 并且各个现场设备间也能进行互相通信。
在本协议 中用类 I D来对各种现场设备进行识
别, 范围为124 它的 -5,
3. .2对象 2 在一个控制系统中, 一类设备可能不止一台, 我 们用对象来定义一类设备中的每个实例。它的范围为
12 4 -5 0
7 若该帧为设备层信息帧, E为帧头; 则不包含类 I D与对象I; D 长度为所包含的数据长度; 校验为除校 验字节之外所有字节的异或结果。 3 .命令帧 .2 3
现。经 运 试, 现场 行调 控制系 统和以 节点 能 运 且 层协 矢网 均 稳定 行, 应用 议的实 性 错 时 及容 性是能够 保障 得到 的。
关键词: 工业以太网; 控制系统; 网络架构; 应用层协议 通信;
中图分类号 二P 9 . T 331 1 文献标识码 : A
A s at Te t d ds n g i u rl e e bs p c s tl t ad lao l e p t a i ito u e . bt c h m h o e gi a n si e r t e r e c r s e n apctn r o l nrd c d r : e o f i n n ta t n a d s o o y m p i i a r c s d h o n s y o c e o Te wr a he u o c tl e cn s o to e ; hr a a hehr o e e e nd ib e o ARM7 r h nt k ic r f r s t ost f l r Te d r r icu f r t e a d e o r t h e o o y m is w a s h a w e t e t n o s c n s y c h s n p cs rTe t r a he u ibs o ulu e bde O ; apc i l e p t a i csm d i r le r e o h s w e ic r s e n i x edd Te lao a r o l u oe ad e i d场 o s ; o a r t h e a d C n m f c S h p i tn y r c s t o n s az C ga . i be tt f a l t wo s t iri l l ug Hv g n e o wi, hl y e s a e a n e a n e e d s r he h e e m e b . s l
商业以太网的技术难以满足其需要。这就需要在原有 基础上再建立一套行之有效的应用层协议来满足特 定的工业环境。国际上现已有多种工业以太网应用层 协议, Ehr tPM du-D , nt 如 t n / , bsIA o e等。我国的 e eI o Pf ri
、
、
节点
节点
节点
现场 设备
现场 设备
SC4O 34BX处理器,T81A 负责以太网 R L09S 通信功能。
2 . 3以太网节点的软件结构
控制 系统
MAX 2 2 3 R L 01 T 8 9 AS
我们可以设置一个以太网节点的关联节点, 最多 十个。关联节点可理解为能同该节点协同工作的节 点。当该节点产生某种行为如发生故障时, 该节点能 及时通知关联节点使之采取相应的措施, 从而使系统 能更好的工作。
网更是走向前台, 发展迅速。以太网已经成为目 前市 场上最受欢迎的通信网络之一, 它在工业控制领域管 理层和控制层等中上层网络通信中得到了广泛应用, 并有直接 向下延伸应用于工业现场设备间通信的趋
势。
监控站
监控站
、
矛
、
传统以太网是建立在 IE 82 及 T P P E E0. 3 C/ 基础 I 上的。但由于工业应用的特殊性, 工业以太网对实时 性、 抗干扰性以及环境等因素具有很高的要求 , 原有
设置参数时将节点与 P 相连, C 通过配置软件对 节点进行设置。它们在通信前先要进行握手, 然后再
进行配置信息的传输。具体协议如下 : P -> 握手命令, 0o C -节点: 命令 0
3 .设备层可靠性保障机制 .6 3 设备层中的信息通过串口传送, 串口两端的设备 在向对方发送信息后 , 都会等待对方的应答帧, 只有 在收到应答帧后通信才算成功。当经过一段时间仍未 收到应答帧时, 发送方须重新发送信息给对方。当节 点察觉重发多次后仍无回音时, 则会向监控站报告错
误。
节点一> C 一般回复命令, 1 0 P: 命令 3 0
现场设备< - 以太网节点: -一> 设备层应答帧, 命
令 10 3 4
P -> C -节点: 配置命令, O。 命令 1
4总结
经过一段时间的现场运行调试 ,该系统运行稳 定。即使系统在通信繁忙的情况下亦能稳定可靠的工 作。当通信因发生数据丢失而中断时, 系统可迅速恢 复工作。这说明工业以太网的架构以及以太网节点的 软硬件结构是合理有效的。另一方面, 该系统的应用 层协议也表现出了稳定高效的性能,不仅简单实用,
控制 系 统
文章编号: 0-50 06 5107-3 1 807( 0) --040 0 2 0
中文核心期刊 《 微计算机信息)测控自动化) 0 年第 2 卷第 5 期 ( 26 0 2 - ,
基于工业以太网的控制系统及其应用层协议的设计
D s n C nrl tm d pi t n y r tcl e o Id sr l en t ei o o t S se a A lai L e Poo a B s d n u ta Eh re g f o y n p c o a r a n i t
1 引言
近年来, 随着计算机、 、 通信 网络等信息技术的发 展, 信息交换的领域已经覆盖了工厂、 企业乃至世界 各地的市场。因此, 需要建立包括从工业现场设备层
到控制层 、管理层等各个层次 的综合 自动化 网络平
架构、 且应用简单、 要求成本低, 可以考虑为其设计一
套简洁高效 、 且成本低廉的方案。下面就为大家介绍 笔者 自行设计 的工业 以太 网控制系统及其应用层协 议。
K y rs Id s il e e;o t l t N tok ci cueC mmu i t n, p ct n yr t a e w d: ut a Ehr t nr S s m; w r A ht h r;o o n r t n C o ye e r e nci ;A lai L e P oo l ao pi o a r c
3 .参数设置信息帧 .3 3
心 。。 邮 、 号89 3 元 年一 - 。 局 阅 :-6 / 7 24 6 0 5 , 抽‘护
控 制 系统
中文核心期刊 《 微计算机信息)测控自动化) 0 年第 2 卷第 5 期 ( 26 0 2 - 1
每台以太网节点在投人工作前都要进行参数设 置, 该工作按照特定的协议进行。
注: 系统默认上层主监控站的类 I D与对象 I D为 (,) 00。系统广播的类I D与对象 I 25250 D为(5, ) 5
3 .关联节点 .3 2
7 为帧头; 若该帧为设备层信息帧, F 则不包含类 I D与对象I; D 长度为所包含的命令长度; 校验为除校
验字节之外所有字节的异或结果。
2 控制 系统架构
2 控制系统网络架构 . 1 控制系统网络架构如图 1 所示。控制层设备通过 以太网相互通信, 设备层设备通过串口 相互通信。监 控站可为 P , C现场设备可为阀门、 传感器等术为基础的企业信息化系
统。 现在以太网正悄悄地进人了控制领域。近来以太
工作。
u lu 内核 Ci x n
Bo t a e ol d r o
3 .信息帧格式 .6 2 本协议中信息帧主要分为两种 :数据帧与命令
帧。
图3以太网节点软件结构图
3 应用层协议的设计
31 . 概述 此协议 为用 于工业 以太 网控制系统 的应用层协
数据帧为一般的v 0信息, 而命令帧则包含控制、 查询及设置等命令。
在本协议中控制层与设备层的信息帧格式略有 不同。节点与监控站之间传输的为控制层信息帧, 它 们可由节点转换成设备层信息帧。节点与现场设备间
议, 基于T PP C/ 协议之上。工业以太网节点作为该协 I
议解析器。现场设备可通过连接以太网节点具有网络 通信功能。现场设备、 节点和上层监控系统进行通信
传输的为设备层信息帧, 它们是现场设备能读得懂的 原始信息, 可由节点封装成控制层信息帧。两层协议
的差异将在下节提及。 3 协议详解 . 3 3 .数据帧 .1 3
}信 帧 式 须 合 用 协 的 求 时息格必符应层议要。
3 基本概念 . 2 3 .类 .1 2 在一个控制系统中不止有一种设备, 这就需要对 它们进行归类 , 以便监控系统能方便地对它们进行识
现场 设备
标准 E A受国家“6” P 83计划支持, 已由多家权威部门
共同制订而成。 诚然上述多种标准技术成熟 、且都有大公 司背 景, 但其技术相对较复杂、 有一定门槛 、 且配套设备成 本较高, 这就对实际应用与维护有较高要求 , 所以适 用于大型系统 。而有些控制系统并不需要复杂的网络