光纤陀螺惯性测量单元的设计与实现
光纤陀螺监测系统设计
光纤陀螺监测系统设计摘要:为了监测光纤陀螺在运行过程中因电源电压、电流及陀螺环境温度变化而直接影响其使用精度甚至系统运行出现故障等问题,设计了一种基于DSP的实时自动数字监测系统,将监测到的陀螺运行状态数据通过LCD显示;将采集到的温度信号通过接口电路传递到温控系统;当监测到系统运行异常时可自动关闭系统以达到对陀螺的保护作用。
本系统提高了光纤陀螺的可靠性及安全性。
关键词:光纤陀螺;无缝接口; LCD显示;数字自动监测系统光纤陀螺(FOG)是以Sagnac效应为基础发展起来的新型全固态陀螺仪,是一种无机械转动部件的惯性测量元件,具有无运动和磨损部件、启动快、寿命长、体积小、质量轻、耐冲击、精度高、动态范围大等优越性能,广泛用于军事和民用工业等领域[1]。
光纤陀螺的性能受众多环境因素的影响,供电电压、电流及环境温度的变化是影响光纤陀螺性能的重要因素。
对于这些影响光纤陀螺性能的因素进行有效的监测,有助于系统的故障检测和提高陀螺的使用精度,更重要的是对系统起到了一种实时保护作用。
本文采用基于DSP的数字自动监测电路,分别对电源电压、电流以及环境温度进行实时监测,并且将监测到的数据通过接口电路发送到PC和温控系统以及LCD显示装置。
1 系统设计系统工作原理:通过对系统工作时的电源电压、电流及环境温度信号进行调理、A/D采样、滤波算法、待测值计算算法等处理后得出系统的工作状态。
电压信号通过信号调理电路后可以直接进行A/D采样;电流信号先通过电流/电压转换电路,再通过信号调理电路,最后经A/D采样;温度信号由温度传感器AD590获得,根据流过器件的电流(μA)等于器件所处环境的热力学温度(开尔文)度数:I/T=1即1 μA/K,串联一个电阻将电流信号转换成电压信号,A/D采样后,由电压与温度的关系得到温度值。
NTC热敏电阻测温时,主要原理是通过测得电阻值后,根据热敏电阻阻值与温度的关系转换成温度值,所以,本系统采用四臂电桥法[2]来测量热敏电阻的阻值。
光纤陀螺捷联惯性导航系统标定测试技术研究的开题报告

光纤陀螺捷联惯性导航系统标定测试技术研究的开题报告一、研究背景惯性导航系统(Inertial Navigation System, INS)是一种有效的位置和速度测量手段,具有高精度、高可靠性等特点,被广泛应用于航空、航天、海洋、测绘、导航等领域。
光纤陀螺是惯性导航系统中的核心部件之一,其具有精度高、稳定可靠、长时间工作等特点。
然而,由于光纤陀螺的非线性特性和误差积累,陀螺漂移等问题,使得 INS 在长期使用过程中需要进行定期标定和校准以保证其精度和可靠性。
同时,由于 INS 在使用过程中存在复杂的运动和工作环境,标定测试技术也需要能够适应不同的工作环境和精度要求。
因此,本研究旨在针对光纤陀螺捷联惯性导航系统的标定测试技术进行深入研究和探讨。
二、研究内容和目标1. 研究光纤陀螺捷联惯性导航系统的原理和组成结构,并分析其误差来源和误差特征;2. 分析现有的光纤陀螺标定测试技术及其优缺点,并结合我国航空领域发展现状和需求,提出针对不同环境和精度要求的标定测试方案;3. 设计标定测试实验方案,建立光纤陀螺捷联惯性导航系统的测试平台和数据处理系统,进行标定和测试实验,并分析实验结果和误差特征;4. 探索和优化光纤陀螺捷联惯性导航系统的标定测试技术,提高其精度和可靠性。
三、研究方法和技术路线1. 文献资料研究法:对 INS 和光纤陀螺的发展历程、工作原理、误差来源、标定测试技术等进行系统分析和综述;2. 建模分析法:建立光纤陀螺捷联惯性导航系统的数学模型,分析其误差源和误差特征;3. 设计实验法:设计标定测试方案,建立测试平台和数据处理系统,进行标定和测试实验,并分析实验结果和误差特征;4. 优化探索法:根据实验结果和分析,探索和优化光纤陀螺捷联惯性导航系统的标定测试技术。
四、研究意义和预期成果本研究的意义在于对光纤陀螺捷联惯性导航系统的标定测试技术进行深入研究和探讨,提高 INS 的精度和可靠性,同时对我国航空领域的发展和应用具有重要意义。
光纤陀螺测试装置设计

光纤陀螺测试装置设计【摘要】本文为实现对某设备中光纤陀螺的维修测试,设计了基于ARM9、具备快速检测该型光纤陀螺的功能的装置,并可通过速率转台等辅助设备对其进行性能测试的功能。
【关键词】光纤陀螺;测试;ARM9引言光纤陀螺是一种基于萨格纳克(Sagnac)效应的传感器件。
与机电陀螺相比具有精度高、动态范围宽、性能稳定、寿命长、价格少等优点,因此被广泛应用于现代航空、航海、航天和国防工业中。
随着光纤陀螺应用越来越多,在设备维护过程中迫切需要具有快速检测陀螺功能及性能的便携式检测设备。
本文针对某型设备中的光纤陀螺,采用基于ARM9的Samsung S3C2440设计了一种具有快速检测该型光纤陀螺的功能的便携测试装置,通过速率转台、隔振平台等辅助设备可进行光纤陀螺性能指标的测试。
1.测试对象及功能定义测试的对象是俄罗斯Fizoptika公司生产的高性能、微型化的光纤陀螺VG910,该陀螺具有比例因子大的特点,常常用于天线伺服控制系统中。
VG910是模拟输出的陀螺仪,其对外接口定义如表1所示。
表1 VG910接口定义序号定义描述1 +5V 供电电压,+5V偏差0.25V内2 +12V 输入电源,范围+9V~+16V,10mA3 OUTPUT 输出电压(55mV/deg/sec)4 -12V 输入电源,范围-9V~-16V,10mA5 AGND 信号地6 GND 地7 KEY /8 GND 地9 NO 保留10 NO 保留对光纤陀螺测试的功能定义只为在设备维修过程中快速检测陀螺是否故障,为增加该测试装置的应用范围,同时定义了对标度因素、零偏等性能指标的测试。
即提供与速率转台的接口,根据光纤陀螺测试规范设计一套自动测试的程序。
对光纤陀螺测试的功能定义如下:(1)有无数据输出,该项可判断陀螺是否工作。
(2)数据是否有效,看数据输出是否在正常范围内。
(3)数据输出量,通过实际输出量与标准量对比看陀螺正常工作与否。
凌思 LINS-F500型光纤陀螺惯性测量单元 说明书

LINS-F500型光纤陀螺惯性测量单元规格说明书无锡凌思科技有限责任公司LINS-F500光纤惯组技术指标1简介光纤陀螺作为一种新型全固态陀螺,具有启动快、测量范围广和可靠性高等优点。
其中,LINS-F500型光纤陀螺惯组是针对中等精度应用背景的需求,采用三轴共用技术设计,成本低、性能稳定;结构上采用光路、电路一体封装,结构简单,安装方便,可应用与小型导弹、制导炸弹的导航制导、姿态测量与控制等系统中。
1.1 应用范围该说明书仅适用于LINS-F500型产品,包含了性能指标、技术条件、外形尺寸及安装使用。
其中,技术条件包括产品的环境范围、电气性能、物理特征。
1.2 主要参数1.2.1 光纤陀螺仪主要性能指标:LINS-F500主要性能指标1.2.2 力学测试 1.2.2.1 正弦扫描振动陀螺按振动方向通过工装固定在振动台上,陀螺仪进行3个方向的正弦扫描,分别对应于X 轴、Y 轴、Z 轴方向。
振动步骤;振动台加激磁,给陀螺仪加电,预热一定时间后(陀螺启动时间),测试陀螺仪输出值,约5min ;进行正弦振动。
振动条件:20Hz-2000Hz ,扫描时间5min ,幅值4.2g 。
振动过程中,记录陀螺仪输出。
随机振动振动频率:20Hz~2000Hz 振动时间:各轴分别为5min 振动方向:X 、Y 、Z 轴 振动谱图:见附图1附图1振动谱图 指标要求:光纤陀螺在20HZ ~2000Hz 范围正弦扫频扫描无谐振;随机振动:振中零偏值与前后零偏平均值的绝对值≤0.1º/h ,振前与振后零偏差的绝对值≤0.05 º/h。
1.2.2.2 机械冲击按表2的要求。
表2冲击试验条件功率谱密度 0.06g 2Hz冲击过程中,产品处于通电状态,完成机械冲击产品,应能正常工作,冲击前后零偏差的绝对值≤0.05 º/h。
2. 通讯协议注:1. 加速度值单位是g,角速度值单位是弧度/秒,姿态角度单位是弧度.2. 串口配置是1bit起始位,8bit数据,无校验位,1bit停止位,默认波特率1152003、接线定义4、产品外形尺寸LINS-F500 IMU外形尺寸图。
光纤陀螺惯性导航系统测试方法-最新国标

目次1范围 (1)2规范性引用文件 (1)3术语、定义和符号 (1)4测试环境 (2)5测试设备和仪器 (2)6测试项目 (3)7测试方法 (3)光纤陀螺惯性导航系统测试方法1 范围本文件规定了光纤陀螺惯性导航系统(以下简称“光纤惯导”)的功能及性能测试方法,包括测试环境、测试设备和仪器、测试项目、测试方法等。
本文件适用于民用和军用飞机、车辆、舰船、潜航器、制导武器等各类运载体上使用的光纤惯导功能及性能测试,也适用于基于光纤惯导构成的组合导航系统中惯性导航相关的功能及性能测试。
2 规范性引用文件下列文件中的内容通过文中的规范性应用而构成本文件必不可少是条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 9390-2017导航术语GJB 150.2A-2009军用设备实验室环境试验方法第2部分:低气压(高度)试验GJB 150.3A-2009军用设备实验室环境试验方法第3部分:高温试验GJB 150.4A-2009军用设备实验室环境试验方法第4部分:低温试验GJB 150.5A-2009军用设备实验室环境试验方法第5部分:温度冲击试验GJB 150.6-1986军用设备环境试验方法温度-高度试验GJB 150.9A-2009军用装备实验室环境试验方法第9部分:湿热试验GJB 150.15A-2009军用设备实验室环境试验方法第15部分:加速度试验GJB 150.16A-2009军用装备实验室环境试验方法第16部分:振动试验GJB 150.17A-2009军用装备实验室环境试验方法第17部分:噪声试验GJB 150.18A-2009军用设备实验室环境试验方法第18部分:冲击试验GJB 150.23A-2009军用设备实验室环境试验方法第23部分:倾斜和摇摆试验GJB 585A-1998惯性技术术语GJB 729-1989惯性导航系统精度评定方法3 术语和定义GB/T 9390-2017、GJB 585A-1998和GJB 729-1989界定的以及以下术语和定义适用于本文件。
基于光纤陀螺仪的惯性导航系统设计与应用

基于光纤陀螺仪的惯性导航系统设计与应用随着科技的发展和人类探索空间的需求不断增加,惯性导航系统逐渐成为了一种必不可少的航行设备。
它可以通过记录飞行器在空间中的运动状态和运动轨迹来实现空间导航的精准性和可靠性。
在惯性导航系统的实现中,光纤陀螺仪是一种关键的传感器,它的高精度和稳定性可以为惯性导航系统提供所需的数据支持,因而具有广泛的应用前景。
基于光纤陀螺仪的惯性导航系统是一种高精度的导航系统,它主要有三个部分组成:加速度计、光纤陀螺仪和微处理器。
加速度计主要是用来检测物体在空间中的加速度,并将其转化为电信号输出;光纤陀螺仪是一种利用Sagnac效应进行测量的陀螺仪,用于测量物体在空间中的旋转角速度;微处理器则主要是用来处理传感器输出的电信号,并进行计算和导航。
相比传统的机械式陀螺仪,光纤陀螺仪具有更高的精度和稳定性,因为它不需要复杂的机械运动部件,而是利用光学原理来实现惯性导航的功能。
光纤陀螺仪的测量原理是基于Sagnac效应,利用光信号在光纤中的传播速度随光传播方向的变化而发生的相位差来实现测量。
在光纤陀螺仪中,光信号分别在X、Y、Z三个轴的光纤环路中传输,通过测量三个光纤环路中光信号传输的差异来测量空间中重力加速度的XYZ方向和角速度的XYZ轴分量,从而实现对飞行器的导航控制。
光纤陀螺仪的精度和稳定性受到很多因素的影响,其中包括温度、震动、光强等等。
为了提高光纤陀螺仪的精度和稳定性,需要进行一些优化和改进。
例如,可以通过优化光纤的材料和制作工艺来减小光传播时遇到的损耗;可以通过引入相位稳定器来防止传输光信号时受到温度变化等方面的影响。
虽然基于光纤陀螺仪的惯性导航系统具有高精度和稳定性的优势,但它也存在一些挑战和限制。
其一是成本较高,因为光纤陀螺仪的制造过程和技术要求较高;其二是体积较大,因为光纤陀螺仪在设计过程中需要考虑其稳定性和精度的要求,因而导致系统体积较大;其三是必须在外部参考系统的支持下进行使用,因为光纤陀螺仪本身无法提供实际的位置和速度信息。
光纤陀螺实验报告精选全文完整版
可编辑修改精选全文完整版数字闭环全保偏干涉型光纤陀螺一. 实验目的刚体的定轴转动是大学物理中的重要教学内容。
学生学习了这部分内容之后,都知道陀螺仪由于其定向作用而用于飞机导航系统。
但学生往往以为现代飞行器上的陀螺仪都是这种传统的机械陀螺仪。
实际上,光纤陀螺已成功地用于航空、航天等领域,是近20年发展较快的一种陀螺仪。
光纤陀螺演示可以使学生开阔眼界,提高综合运用知识的能力。
二.实验原理光纤陀螺仪都是根据萨格纳克效应研制的。
光在萨格纳克效应中产生的光程差与旋转角速度成正比,从而可通过光的干涉结果推算角速度。
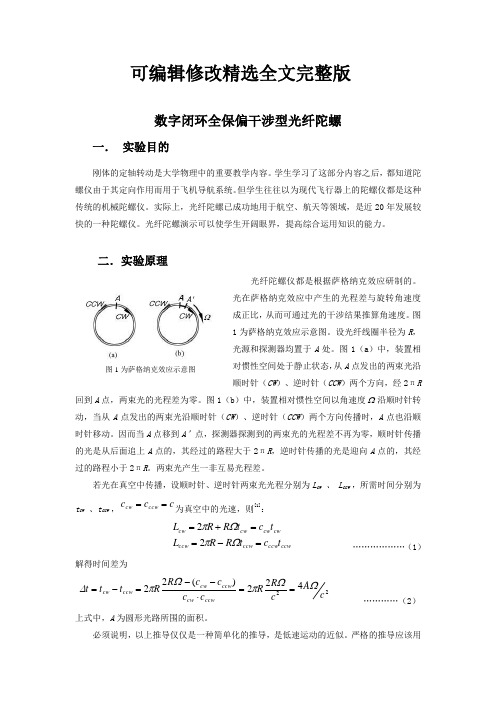
图1为萨格纳克效应示意图。
设光纤线圈半径为R ,光源和探测器均置于A 处。
图1(a )中,装置相对惯性空间处于静止状态,从A 点发出的两束光沿顺时针(CW )、逆时针(CCW )两个方向,经2πR回到A 点,两束光的光程差为零。
图1(b )中,装置相对惯性空间以角速度Ω沿顺时针转动,当从A 点发出的两束光沿顺时针(CW )、逆时针(CCW )两个方向传播时,A 点也沿顺时针移动。
因而当A 点移到A’点,探测器探测到的两束光的光程差不再为零,顺时针传播的光是从后面追上A 点的,其经过的路程大于2πR ,逆时针传播的光是迎向A 点的,其经过的路程小于2πR 。
两束光产生一非互易光程差。
若光在真空中传播,设顺时针、逆时针两束光光程分别为L CW 、 L CCW ,所需时间分别为t CW 、t CCW ,c c c ccw cw ==为真空中的光速,则[1]:ccw ccw ccw ccw cwcw cw cw t c t R R L t c t R R L =-==+=ΩπΩπ22 (1)解得时间差为 22422)(22c A c R R c c c c R Rt t t ccw cw ccw cw ccw cw ΩΩπΩπ∆==⋅--=-= …………(2) 上式中,A 为圆形光路所围的面积。
必须说明,以上推导仅仅是一种简单化的推导,是低速运动的近似。
光纤陀螺惯性测量单元高精度混合式标定技术

光纤陀螺惯性测量单元高精度混合式标定技术目前,高精度光纤陀螺惯性测量单元在出厂标定完成并交付使用一段时间后,其内部惯性器件的性能参数可能发生改变。
此外,一些系统性能参数如内杆臂参数、时间延迟参数等在出厂标定的过程中未被考虑。
因此,本文针对几种主要的系统性能参数进行研究并提出了包含系统级参数误差标定、内杆臂参数标定和时延参数标定的厂外混合式标定方法。
系统级标定法的目的在于减少标定过程对转台精度的依赖,因此提出了一种基于18位置转停翻滚路径的系统级标定方案,能够对出厂标定的结果进行精确的修正。
根据惯导误差基本测量模型,推导了系统级标定Kalman滤波模型,分别进行了单轴旋转路径下和18位置翻滚路径下的可观测性分析与仿真试验,之后进行转台试验。
最终验证了提出的18位置翻滚路径下的系统级标定方法能够标定出较为精确系统参数误差。
转台标定试验过程中,光纤陀螺惯性测量单元总是沿着不同轴旋转才能对误差参数提供足够的激励。
而由于内杆臂误差的存在,频繁的旋转运动可能产生严重的内杆臂误差。
本文在传统内杆臂参数标定方法的基础上,设计了一种有效的摇摆旋转标定方案,通过理论研究解释该方案的合理性以及采用两种不同的标定路径比较验证。
可观测性分析和试验结果都表明,所提方法能够标定出较高精度的内杆臂参数。
最终,经过标定结果的补偿,内杆臂误差被显著抑制。
实际的光纤陀螺惯性测量单元中,每个惯性器件之间可能存在输出信号时间的异步问题,特别是在高动态翻滚测试的环境下,将会影响捷联惯导系统速度更新准确性。
本文充分考虑三个加速度计与陀螺仪之间的时间异步误差,提出了一种基于单轴连续旋转路径下的时间延迟参数标定方法,设计Kalman滤波器并有效标定时延参数。
仿真与转台试验验证了所提方案能精确辨识加速度计与陀螺仪之间的三个时延参数,最终实现系统输出信号的时间同步。
满足高精度光纤陀螺惯性测量单元的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Design and Implementation of IMU Based on FOGs
SON G Ning f ang , Z HANG Chun xi , M A Ying jian, DU Xin zheng , Z HAN Wei x u ( Beijing Univ ersi t y o f Aero nautics and Ast ronauti cs, Beiji ng 100083, China)
收稿日期: 1999 01 18 作者简介: 宋凝芳 ,女 ,北京航空航天大学宇航学院讲师 ,从 事 G PS应用及光纤陀螺研究。
宋凝芳等: 光纤陀螺惯性测量单元的设计与实现
29
性测量单元 ( IM U)。 用光纤陀螺构造的惯性测量 单元 ,可 以根据应用对象的不同设计要求 ,在精 度 、成 本、 重 量、 体积 等 方 面 进行 灵 活 及容 错 的 综 合设计。
摘要: 本文介绍采用全数字闭环光纤陀螺组成的惯性测量单元的实现方法 ,采用 DSP作为中 央处理单元 ,完成三轴组合的时序控制、数字解调、滤波算法、波形合成及数据传输 ,并对三轴 陀螺进行了全面的性能测试 ,测试结果表明惯性测量单元中每个陀螺零漂均小于 0. 5°/h,标 度因数线性度 < 200 ppm ,达到了预期的设计要求。
closed loo p
1 引言 光纤陀螺是一种完全不同于常规机电陀螺的
光电传感器。 它没有机械活动部件 ,具有工艺简 单 、体 积 小、 重量 轻 、启 动 速 度快 、灵 敏 度 高、 动 态 范围大、抗冲击和耐过载等一系列的优异性能。在 航 空、 航 天、 航海 等 军 用 及地 质 、石 油 勘探 等 民 用 领域具有广阔的发展前景 ,成为国内外研究的热 点。国内在光纤陀螺研究方面也投入了大量人力、 物力。 目前 ,单轴光纤陀螺技术已经成熟 ,接近实 用化。
光纤陀螺惯性测量单元的设计方案有几种。 本文主要介绍以 DSP为基础进行并行处理的全 数字闭环光纤陀螺惯性测量单元设计方案。 由于 闭环光纤陀螺能提供更大的动态范围以及良好的 标度因数线性度 ,并且实现方法已趋近成熟 ,实验 室样机已达 0. 3°/h的精度 ,所以采用三个单轴全 数字闭环光纤螺组成惯性测量单元无疑是首选方 案之一。
图 2 闭环光纤陀螺相 位调制关系
闭 环 检测 电 路 包 括前 置 放 大、 A /D 转换、 DSP、逻辑器件、 D / A转换及驱动等相关电 路组 成 ,完成数字解调、数字滤滤、阶梯波形成、反馈控 制、时序控制、信号输出等基本功能。
3 惯性测量单元的实现 以闭环光纤陀螺构造的惯性测量单元 ,每个 陀螺有单独的检测电路 , 其基本结构如图 3 所示。 三轴陀螺共用一个现场可编辑的逻辑阵 列 ( FPGA)实现时序控制及阶梯波形成。 一 个 DSP作为中央处理器 ,完成对三轴陀螺的 数 字 调解 、数 字 滤 波、 波 形反 馈 及 数 据 输出 。 为了保证系统的实时性控制 , DSP软件采用 中断方式完成解调和信号输出 ,并保证信号 输出的优先级高于陀螺信号处理的优先级。 其基本程序框图如图 4所示 ,数字解调中断 服务子程序如图 5所示。
2 闭环光纤陀螺的硬件组成 闭环光纤陀螺的基本原理是在光纤环中人为
地引入一非互易的补偿相移 ,以抵消由于光纤环 转动产生的 Sag nac相移。 补偿相移与 Sag nac相 移大小相等、方向相反 ,使光纤陀螺始终工作在灵 敏度最高的零相位差点附近。 陀螺的输出信号可 以从补偿相位中获得。这时 ,陀螺的动态范围和线 性度取决于引入补偿相位的器件性能。 在电路实 现上 ,根据选用的解调手段和进行相位调制的控 制波形的不同 ,闭环光纤陀螺又分为模拟闭环和 数字闭环。模拟闭环采用钮齿波来实现相位补偿 , 数字闭环采用数字阶梯波反馈来实现相位补偿。 由 于模 拟 闭 环采 用 的 锯 齿波 要 求 具有 短 的、 稳 定 的回归时间来提高标度因数的线性度及稳定度 , 在技术上有一定难度。 因而目前国内外一般都采 用数字阶梯波反馈的数字闭环方案 ,如图 1所示。
惯性测量单元为导航、制导和控制系统的核 心 ,主要由以下几部分组成:
①陀螺传感器 ,用于敏感角速度或角度。
②加速度计传感器 ,用于敏感比力 ,从而获得 速度、位置的变化量。
③处理器部件 ,用于处理陀螺和加速度计传 感器数据 ,形成系统解算所需的信息。
随 着以 计算机 为“ 数学 平台 ”的捷 联技 术的 发 展 ,由捷联式测量单元构成的系统在某些应用中 正在逐渐取代传统的框架式系统。对惯性器件 (陀 螺仪和加速度计 )也提出了更高的要求 ,而传统的 机电陀螺已很难满足这方面的要求。 光纤陀螺作 为中等精度器件 ,应用于惯性测量单元中 ,具有令 人称道的特性。与挠性陀螺相比 ,它具有抗冲击及 可靠性高等特性 ; 与激光陀螺相比 ,具有体积小、 成本低及无闭锁的特点。因此 ,特别适合于构造惯
参考文献:
[ 1] Bernhard E. Bo ser e t al. Surface micro machined acceler omet ers [ J]. I EEE Jour na l of Solid Sta te Cir cuit, M a rch 1996, 3: 366- 375.
[ 3 ] W ar ren K. Electro statically fo rce bala nced silicon accele rom eter [ J]. Jour nal of the Institute o f Navig atio n, 1991, ( 38) 1: 91- 99.
[ 4] Greiff. P et a l. Silico n accelero meter. In: ION 52nd Annual M eeting , Ca mbrig e, June 19- 21, 1996: 713 - 718.
[ 5 ] St roh rmann. M et a l. Accelera tio n senso r with integ ra ted co mpensa tion of tempera ture effec ts by the L IG A process [ J]. Senso rs and Actuato rs, A41- 42, 1994: 426- 429.
35
电容解调器 ,开关采用 CM OS工艺 ,开关由电容 电桥互为反相的两个电压 Vs 驱动 ,其解调输出为 V 0= - CCif· Vi。
4 结论 综上所述 ,加速度计检测电路可以采用具有
单位增益缓冲放大器的交流电容电桥检测电路 , 再经同步解调器输出。 但受电路分布电容和噪音 的影响 ,欲实现较高精度 ,还必须将上述电路与电 容传感器集成在一个基片上 ,使这种扭摆式加速 度计具有检测 10 μg加速度的潜力。
图 1 闭环光纤陀螺原理框 图
4 陀螺性能测试 ①陀螺结构参数见表 1所示
30
宋凝芳等: 光纤陀螺惯性测量单元的设计与实现
图 3 惯性测量单元 的构成框图
图 4 主程序流程 图
图 5 中断子程序流程图
表1
光纤长度
光纤环直径
SL D功率
Y 波导半波 电压
X 轴 500 m
Abstract: This paper describes a n im plenent atio n method o f Inertia l M easurem ent Uni ts ( IM U) using all digi tal Fiber Optic Cyro sco pes( FOG) . Th e timi ng cont ro l, digi tal demodulati on, fi lt er alg orit hms, w av efo rm combi nat aon a nd dat a com munica tion fo r t he three axis int eg rat ed FO G a re carri ed out by a digi tal sig nal processo r( DSP) . T he test result of three FOGs i s presented. The perfo rmance o f < 0. 5°/h bias st abilit y, < 200ppm scale f act or accuracy is achiev ed, and the system sa ti sfi es the desig n requi rem ent s. Key words: Fiber Optic Gy roscope; i nerti al measurement unit; digi tal si gnal processor;
中国惯性技术学报 1999年 3月第 7卷第 1期
· 仪表研究与设计· 文章编号: 1005 6734( 1999) 01 0028 04
光纤陀螺惯性测量单元的设计与实现
宋凝芳 , 张春熹 , 马迎建 , 杜新政 , 张维叙
(北京航空航天大学 ,北京 100083)
图 11 Z轴陀螺标度因数线性度曲线
5 结论分析
三只陀螺的性能测试参数如表 2所示。
由测试结果可以看出 ,采用 DS P并行处理的
三轴陀螺惯性测量单元的设计方案是可行的 ,它
具有易于实现、算法灵活等优点 ,并达到了预期的
设计要求。
(下转第 35页 )
赵长德等: 微机械加速度计及电容检测电路的设计
76 mm 80 μW
Байду номын сангаас
2. 4 V
Y 轴 500 m
76 mm 80 μW
2. 1 V
Z轴
500 m
76 mm 80 μW