基于SVPWM的感应电机转子磁场定向控制系统研究
基于SVPWM的五相感应电机转矩预测控制策略
基于SVPWM的五相感应电机转矩预测控制策略摘要:多相电机具有低压大功率、效率高、转矩脉动小以及故障时能抗干扰运行等优势,在大功率和高可靠性工业应用场合得到了广泛应用。
直接转矩控制作为高精度多相调速的重要方式得到了深入的研究,针对传统直接转矩控制(dtc)存在的缺点,如开关频率不恒定,转动脉动大等;基于上述问题,本文对基于多相空间矢量脉宽调制(svpwm)的转矩预测控制方法进行了研究。
仿真和实验结果表明,基于多相svpwm的转矩预测控制能够有效改善定子电流,减小转矩脉动,进而提高电机运行性能。
关键词:多相电机直接转矩控制预测控制多相svpwm 前言与传统的三相电机变频调速系统相比,多相系统[1,2]拥有诸多优势:能够实现低压大功率、拥有更多的控制自由度、更强的容错运行能力和更小的转矩脉动等。
由于上述优点以及大功率传动领域的旺盛需求,多相调速系统成为学术界和工程界的研究热点。
目前高精度多相调速系统控制策略主要有矢量控制和直接转矩控制,其中矢量控制对参数的依赖性比较大,而直接转矩控制具有系统结构简单,转矩动态响应快,以及鲁棒性好等优点,因此得到越来越多的研究。
基于开关表的直接转矩控制[3]策略通过滞环方式,粗略地控制磁链大小和转矩变化方向,而不能精确地控制其变化量,会导致调速系统低速运行性能较差并且稳态转矩脉动较大,特别是在多相电机中,注入的电压谐波映射到其他平面,进而产生谐波电流,对电机产生不利影响。
而基于多相svpwm的转矩预测控制策略[4],可以通过相关算法得到所需要的理想电压矢量,从而实现对转矩差值和磁链差值的精确控制。
基于svpwm的转矩预测方法将磁链差值和转矩差值经过两个pi调节器,得到相应平面的电压矢量。
以5相感应电机为例,可以分为基波平面和3次谐波平面,通过上述方法可以很方便实现对任何一个平面电压矢量的控制,进而可以有效抑制定子电流谐波,并且能够应用非正弦供电技术。
1、基于svpwm的转矩预测控制方法相关文献已经对传统3相电机基于svpwm[的转矩预测控制方法进行了相关介绍与研究[3-4]。
基于SVPWM的永磁同步电机直接转矩控制系统的研究
基于SVPWM的永磁同步电机直接转矩控制系统的研究永磁同步电机直接转矩空间矢量脉宽调制Matlab/Simulink1引言空间矢量脉宽调制(SVPWM)技术是在一个控制周期内,通过相邻基本电压矢量和零电压矢量合成得到所需的任意电压矢量,实现电压矢量的线性连续可调的技术[1,2]。
本文运用了一种基于空间矢量脉宽调制(SVPWM)的永磁同步电机的直接转矩控制算法,其原理是根据转矩和定子磁链的误差,通过驱使误差为零的原则确定参考电压空间矢量,然后通过SVPWM技术合成该矢量[3],由于在下一个控制周期内,采样时刻的电压和磁链误差可以得到补偿,因此转矩和磁链的误差始终能够控制在一个很小的范围,二者的脉动很小。
2SVPWM的基本原理交流电动机输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。
因此,如果把逆变器和交流电机看成一个整体,控制逆变器的工作状态以此来产生跟踪圆形的旋转磁场,能够达到很好的控制效果。
SVPWM将逆变器和交流电机视为一个整体观念,把三相对称的正弦波电源供电时交流电机产生的理想磁链圆作为参考对象,通过选择三相逆变器的六个功率开关器件的特定开关模式,生成SVPWM脉宽调制波,从而使电机的实际磁链尽可能地逼近理想的圆形,产生恒定的电磁转矩[4]。
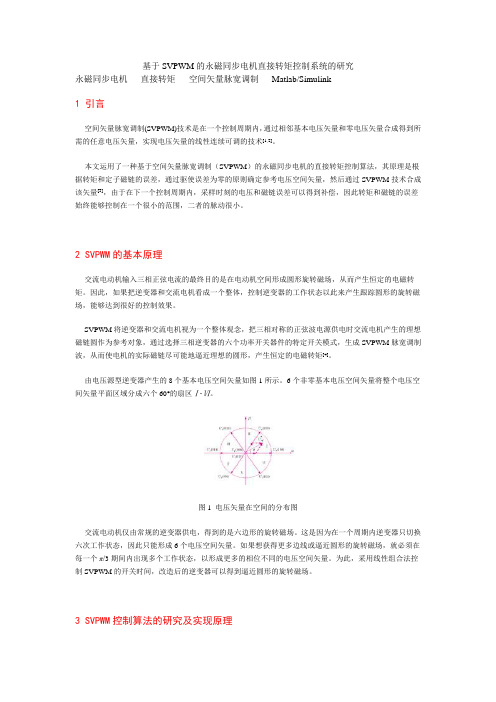
由电压源型逆变器产生的8个基本电压空间矢量如图1所示。
6个非零基本电压空间矢量将整个电压空间矢量平面区域分成六个60°的扇区Ⅰ-Ⅵ。
图1 电压矢量在空间的分布图交流电动机仅由常规的逆变器供电,得到的是六边形的旋转磁场。
这是因为在一个周期内逆变器只切换六次工作状态,因此只能形成6个电压空间矢量。
如果想获得更多边线或逼近圆形的旋转磁场,就必须在每一个π/3期间内出现多个工作状态,以形成更多的相位不同的电压空间矢量。
为此,采用线性组合法控制SVPWM的开关时间,改造后的逆变器可以得到逼近圆形的旋转磁场。
3SVPWM控制算法的研究及实现原理3.1 参考电压矢量所在扇区的判断由图1所示,SVPWM分为六个扇区,电压矢量所在的扇区是由Urefα和Urefβ决定的。
基于SVPWM的无刷直流电机控制策略的研究

基于SVPWM的无刷直流电机控制策略的研究作者:贺海波来源:《科学与财富》2018年第14期摘要:方波控制下无刷直流电机(BLDCM)运行过程中转矩脉动大、换相噪声明显。
针对上述问题,提出了基于SVPWM的无刷直流电机磁场定向控制策略。
通过转子磁场定向,实现了无刷直流电机电磁转矩与转子磁链的自然解耦。
建立Smulink仿真平台完成对所提算法的建模,进一步验证了控制方案的可行性,通过对比仿真波形曲线可知,矢量控制下电机达到稳态所需上升时间较短,能较快速跟随目标转速,有较好的动态调速性能,同时抗干扰动性能力强,电机稳定性更好,转矩脉动更小。
关键词:无刷直流电机;SVPWM;磁场定向;0 引言无刷直流电机(BLDCM)相比于有刷直流电机及交流电机具有其自身的许多优点,如调速性能优良,动态响应迅速,速度/扭矩性能好以及使用寿命长等。
现今,无刷直流电机在汽车、家电、计算机、工业、医疗、航空航天等领域得到了广泛应用[1,2]。
由于传统PID控制器具有算法简单、稳定和可靠性高等优点,因此广泛应用于速度控制系统[3]。
传统的无刷直流电机一般都采用方波控制,算法简单,易于控制,但噪声高,而且转矩脉动大,对电机控制效率不高[4]。
本文从电机的动态数学模型出发,推导了高性能调速方案的控制模型。
通过与传统的方波控制比较,证明利用矢量控制来控制BLDCM更具优越性。
并利用Simulink搭建无刷直流电机矢量控制系统图,得到转速、电流和转矩的仿真波形,并对实验数据进行理论分析,进一步验证了控制方案的可行性。
1 无刷直流电机数学模型以两相导通星型连接的三相六状态作为研究对象建立数学模型,需做以下假设[5]:1、参数相同且保持恒定,电机的气隙磁感应强度在空间呈梯形分布;2、忽略定子铁心齿槽效应和空间谐波;3、定子与转子之间气隙均匀,不计磁路饱和,不考虑电枢反应。
4、不计涡流和磁滞损耗,转子上没有阻尼绕组;通过电机的电压方程经过Clark变换和Park变换得到在同步旋转坐标系下的数学模型。
基于SVPWM的永磁同步电机控制18页文档
因此通过坐标变换将电机方程转换为一系列 的常系数微分方程,以简化分析便于研究。
01 永磁同步电机及其矢量控制系统
1.2 永磁同步电机的数学模型
其中,Clark变换、Park变换已在前面介绍,用到的角度由编码器反馈经过计算 后得到。经过变换后,三相定子电流解耦变成两个直流分量iq和id,在实际中矢量控 制的目的是使id趋近于零、iq跟踪速度调节器的输出。控制分别由三个PI调节器完成。
谢谢观看
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
第三步:计算矢量切换点: Ts
TTb aTTa 0/ Tc Tb
4 Tx
2 Ty
2
0
1
1
1
1
1
1
0
0
0
1
1
1
1
0
00001100
0
T0/2
T4/2
T6/2
T7/2
T7/2
T6/2
T4/2
T0/2
在不同的扇区内将Ta,Tb,Tc,分别赋给比较寄存器CMPR1,CMPR2,CMPR3。
03 永磁同步电机双闭环控制系统
基于SVPWM的永磁同步 电机控制
人的差异在于业余时间
基于SVPWM的永磁同步 电机控制
基于定子参考电压矢量预测的SVPWM直接转矩控制研究

基于定子参考电压矢量预测的SVPWM 直接转矩控制研究王磊,王京,张勇军(北京科技大学高效轧制国家工程研究中心,北京100083)摘要:针对感应异步电动机直接转矩控制(direct to rque contr ol,DT C)系统存在转矩和磁链脉动的缺点,推导出一种新的减小脉动的控制策略。
通过对定子磁链的估算,获得下一周期的定子参考电压矢量,利用空间电压矢量脉宽调制(SV PW M )技术得到逆变器的开关控制信号。
通过M atlab/Simulink 仿真研究,验证了此算法的有效性。
关键词:直接转矩控制;空间电压矢量脉宽调制;参考电压矢量;异步电机中图分类号:T M 343 文献标识码:AResearch of Direct Torque Control Based on Forecast of Stator Reference VoltageVector and Space Vector Pulse Width ModulationW A NG Lei,W AN G Jing ,ZH A N G Y ong jun(N ational Engineering Research Center f or A dvanced Rolling Technology in UST B ,Beij ing 100083,China)Abstract:Consider ing the disadv antag es in flux and to rque r ipple o f dir ect t orque contr ol fo r asynchr onous mo tor ,a new co ntr ol strateg y t o r educe the pulse w as pro po sed.With estimating the stato r flux ,the stator reference v oltage v ecto r o f nex t sam ple period w as calculated.T he switching co nt rol signals of the inv erter ar e generated by space vecto r pulse w idth modulatio n (SVP WM )technolog y.T hr ough the simulation r esear ch,the effectiv eness of this contro l str ategy is prov ed.Key words:direct tor que co nt ro l;space vector pulse w idth modulatio n;refer ence vo ltag e vector ;asyn chro no us mot or基金项目:国家 211工程 资助项目(010301)作者简介:王磊(1983-),男,硕士研究生,Email:l_w an g624@hotm 本文针对异步电机,推导出了一种通过磁链估算对电压矢量进行预测的直接转矩控制策略,以减小转矩和磁链脉动,同时利用电压空间矢量脉宽调制的方式不仅可以提高系统稳态性能,同时也使逆变器的开关频率变为近似恒定。
SVPWM的永磁同步电动机控制系统仿真与实验研究

0 引 言
随着 PM S M 应用领域的不断拓宽 , 对电机控 制系统的 要求 也越 来越 高 , 既 要考 虑成本 低廉 、 又需兼顾控制性能好 、开发周期短等特点
[1]
本文将不再细述 , 以下直接给出 PM S M 的数学模 型 、 SVPWM 整体控制方案和在 M atlab / Sim ulink 仿 真软件下针对 PM S M 实现 SVPWM 的方法 , 最后给 出仿真结果和试验波形 。
微电机
2008 年第 41 卷第 3 期
中图分类号 : T M341 T M351 文献标志码 : A 文章编号 : 1001 2 6848 ( 2008 ) 03 20048 204
基于 SVP WM 的永磁同步电动机控制 系统仿真与实验研究
张金利 , 景占荣 , 张玉瑞 , 白世东 , 贾歆莹
[5]
, 由于篇幅所限 ,
。
收稿日期 : ・4 8 ・
2007 204 2 04
© 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved.
基于 SVPWM 的永磁同步电动机控制系统仿真与实验研究 张金利 , 等
- 3
s级 , 针对此问题 , 笔者提出并设
计了“ 积分斜率法 ” 产生三角波脉冲 。其原理是首先 利用 Matlab中自带的方波脉冲产生器 Pulse Genera2
tor设定其脉冲周期为 10
-4
s, 幅度为 10
- 4
-4
, 脉冲宽
- 4 - 4
度为 50% , 将所产生的波形减去常数 015 × 10 , 目的是产生幅度为 + 015 × 10 和 - 015 × 10 交替 的 、周期为 10
异步电机SVPWM的矢量控制系统研究
III
1 绪 论
1多的能源之一,同时也是浪费最多的能源之一,因此电 能的节约利用实为解决能源问题的一个重要方面,其中起代表性的就是电机的控 制。电机是一种将电能转换成机械能的设备,它的用途非常广泛,在现代社会生 活中随处可见电机的身影,在发达国家中生产的总电能有一半以上是用于电机的 能量转换,这些电机传动系统当中 90%左右的是交流异步电机。在国内,电机的总 装机容量已达 4 亿多千瓦,年耗电量达 15000 亿千瓦时,约占工业耗电量的 80%。 并且在我国各类在用电机中,80%以上为 0.55~220KW 中小型异步电机,加之设 备的陈旧,管理、控制技术跟不上,所浪费的电能甚多。因此需要采用高效电动 机及采用调速等方法来提高电动机系统效率,而我国电动机系统的能源利用率约 比国际先进水平低 20%左右,节电潜力更加巨大[1][2]。 交流异步电机突出的优点是结构简单、价格低廉、 ,工作可靠、维护方便、转 动惯量小、效率高以及单机转速和容量没有限制等许多的优点。但是以前甚至现 在我国的交流调速很难达到直流电机那样的调速性能。不仅仅是节能的原因,随 着生产技术的发展,特别是精密机械加工、冶金和交通等工业生产的发展,对电 气传动在启/制动、正/反转以及调速精度、调速范围等静态特性和动态响应方面 提出了更高的要求,而直流电机和交流电机相比,在技术上由于控制简单、调速 平滑、性能良好等优点,在高性能变速传动系统中,长期占据着主导地位。但是, 直流电机由于结构上的原因存在着固有缺点,比如存在机械换向器和电刷,使其 造价偏高、维护困难、寿命短,单机容量、转速和最高电压等都会受到一定的限 制,而且使用环境也有要求(比如易燃易爆的环境下不能使用)。尽管从 20 世纪 30 代开始进行无换相器电机控制系统的研究,但是由于各种条件的限制,没有什么 实质性的进展。而对于交流异步电机,它占据着电气传动总容量 80%的传动领域, 如果交流异步电机采用高性能的变频调速,将节约大量的电能,具有非常大的经 济效益。近年来,交流电动机变频调速技术在传动系统中普遍应用,风机泵类采 用调速技术,可节电 30%~50%;大型传动系统如轧钢、牵引、油气输送、船舶推 进等采用交流电动机变频调速,大大提高设备和工艺的效能。例如轧钢传动采用 交流调速电耗可减少 30%以上,船舶推进采用交流电动机变频调速可提高效率超 过 20%,具有重要的节能效果。我国在“十五”和“十一五”的节能计划中,把 “电动机系统节能”列为重点项目。因此,实施电动机系统节能具有重大的现实 意义和深远的可持续发展意义[3][4]。
基于SVPWH永磁同步电机磁场定向控制算法的仿真
基于SVPWH永磁同步电机磁场定向控制算法的仿真
刘宁;那日沙;王旭东
【期刊名称】《电力电子》
【年(卷),期】2009(000)005
【摘要】空间电压矢量脉宽调制(SVPWM)技术具有线性范围宽、高次谐波少、易于数字实现等特点。
基于转子磁场定向控制算法以及空间电压矢量脉宽调制技术使得永磁同步电机能够获得和直流电机媲美的性能。
本文分析了永磁同步电机的数学模型,建立了转子磁场定向矢量控制的系统模型,并在MATLAB/Simulink环境下对控制系统进行了仿真实现。
仿真结果符合电机实际运行特性,为实际控制系统的设计提供了理论依据。
【总页数】4页(P29-31,39)
【作者】刘宁;那日沙;王旭东
【作者单位】哈尔滨理工大学电气与电子工程学院
【正文语种】中文
【中图分类】TM351
【相关文献】
1.基于永磁同步电机的算法免移植硬件在环实时仿真 [J], 刘虎;严彩忠;柳竹青;丁
信忠;赵长军
2.基于遗传算法的永磁同步电机PID控制器参数设计与仿真研究 [J], 黄亚菲
3.基于永磁同步电机PID算法的制动斩波器控制仿真研究 [J], 王新;
4.基于SVPWM算法的船用永磁同步电机建模及仿真 [J], 邓志华
5.基于i_d=0的双Y移30°永磁同步电机磁场定向控制仿真 [J], 宗世勇;佘致廷;周米洋
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SVPWM的感应电机直接转矩控制系统的研究
基于SVPWM的感应电机直接转矩控制系统的研究
林新涵;张寅孩
【期刊名称】《工业控制计算机》
【年(卷),期】2014(027)004
【摘要】针对传统的直接转矩控制转矩脉动大、开关频率不恒定等问题,提出了一种基于SVPWM技术的新型直接转矩控制系统,并利用MATLAB/SIMULINK仿真软件建立了系统模型.系统采用PI控制器调节磁链和转矩,可以得到能够准确补偿磁链和转矩的参考电压矢量.逆变器的开关状态由SVPWM控制,可以保持逆变器开关频率恒定.实验结果表明该设计是正确的,并能有效的减小磁链和转矩脉动,保持开关频率固定,改善控制系统的性能.
【总页数】3页(P74-75,77)
【作者】林新涵;张寅孩
【作者单位】浙江理工大学,浙江杭州310018;浙江理工大学,浙江杭州310018【正文语种】中文
【相关文献】
1.基于SVPWM五相感应电机直接转矩控制研究 [J], 张成胜;张晓锋;乔鸣忠;于飞
2.基于SVPWM的异步电机直接转矩控制系统仿真研究 [J], 牛明波;魏清汉;王德全
3.基于SVPWM的异步电机直接转矩控制系统仿真研究 [J], 牛明波;魏清汉;王德全
4.基于SVPWM的永磁同步电机直接转矩控制系统的仿真研究 [J], 刘华;关振宏
5.基于SVPWM的感应电机直接转矩控制方法的研究 [J], 高中臣;张爱玲;陈晨因版权原因,仅展示原文概要,查看原文内容请购买。
基于转子磁链定向的无速度传感器矢量控制研究
基于转子磁链定向的无速度传感器矢量控制研究转子磁链定向技术是一种在无速度传感器矢量控制系统中广泛应用的方法。
该技术通过测量电机的转子磁链,实现对电机速度和位置的准确控制。
在传统的矢量控制系统中,通常需要使用速度传感器来获取电机的实时速度信息。
然而,速度传感器不仅增加了系统的成本,而且容易受到外部环境的干扰。
因此,研究人员开始寻找一种无需速度传感器的控制方法,以提高系统的可靠性和稳定性。
基于转子磁链定向的无速度传感器矢量控制技术正是基于这一需求而发展起来的。
该技术通过测量电机的转子磁链来推导出电机的速度和位置信息。
具体而言,通过测量电机绕组的电流和电压信号,可以计算出电机的磁链。
然后,结合电机的电气参数和控制算法,可以推导出电机的速度和位置。
与传统的速度传感器相比,基于转子磁链定向的无速度传感器矢量控制技术具有以下优点。
首先,无需额外的传感器装置,降低了系统的成本。
其次,由于不依赖传感器,系统对外界环境的干扰更小,提高了系统的稳定性。
此外,该技术还可以提供更高的控制精度,使电机的速度和位置控制更加准确和稳定。
然而,基于转子磁链定向的无速度传感器矢量控制技术也存在一些挑战和限制。
首先,由于测量的是转子磁链,需要对电机的参数进行精确测量和建模。
其次,转子磁链定向技术对电机的运行状态和负载的变化比较敏感,需要进行实时的参数补偿和控制策略调整。
此外,该技术在低速和起动时的性能表现较差,需要进一步优化。
综上所述,基于转子磁链定向的无速度传感器矢量控制技术是一种具有潜力的控制方法。
通过测量电机的转子磁链,可以实现对电机速度和位置的准确控制。
然而,该技术还需要进一步的研究和改进,以克服其存在的挑战和限制,提高系统的性能和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1 Pr 也称 ak变换 ) 表达式为 : 0
一 一
C
O0 S m
争
.
s[ ii n O] ]  ̄
瞄
.
㈥
() 4
场 的方式控制逆变器开关动作 , 在这种控制策略下 , 可使直流 侧 电源 电压利用率提高 , 而且 计算简单 , 减少 了开关 损耗进 而 减小了电机 的谐波损耗 , 降低 了转矩的脉动。
1 S WM 的原 理 VP
典 型 的三 相 电压 源 逆 变 器 的 结构 示 意 图 如 图 1 示 。 所
值等于指令 电压 u。使 电机磁链轨迹逼近圆形 。 ,
也 就是 说 , 在任 意小的周期时间 里而 , 使得逆变器 的输 出跟指令电压的平均输 出一样 , 如等式 ( ) 1所示。
1
』
, + ) J丁
Ⅷ
,
』
I
L t t告(l+2x6 广 ) = U T ) (d , U 0
在 两相静止坐标 系中位置 角的算法 , 了基 于 S P 分析 V WM 的感应 电机转子磁场定向控制 系 统原理 , 实现 了 S P 并 V WM 算法。给 出了通
过 MAT A L B仿真软件对 系统进行仿真的结果。 关键词 : 电压空间矢量脉宽调制; 感应电机 ; 转子磁场定向; 仿真 中图分类号 :M3 1 T 0 文献标识码 : A 文章编号 :6 2 5 5 2 0 )2 0 0 - 3 1 7 — 4 X(0 71 - 0 6 0
U(1 4 O
图 2 空 闻矢 量 及 开 关状 态
图 1 三相 电源 逆 变 器 结 构示 意 图
2 转 子磁场 定 向控制
21 坐 标 变 换 .
空间矢量 脉宽调制( V wM) sP 是把 三相逆变器 的输入端电 压在复平面上合成为空间电压矢量 , 并利用逆变器不 同开关状 态形成 的 8个空 间矢 量去逼近 电压 圆 ,以形成 S P V WM触 发 电压空 间矢量 S P V WM控制方法 的数学模 型是建立在 电 机统一理论 和电机坐标轴系变换理论之上的。三相静止 、 两相
(. 1河南理工大学 电气工程与 自动化学 院, 河南 焦作 440 ;. 5002河南工业职业技术学 院, 河南 南阳 430 ) 7 09
摘要 : 绍了电压空 间矢量脉宽调制(V wM) 介 sP 的基本 原理 、 基本 感应 电机理论和 坐标 变换关 系, 出转子磁场定向控 制确定定向磁场 给
6
维普资讯
《 装备制造技术) 07 2 0 年第 l 期 2
1
1
加正 电压 , 与 c b相 相都加负电压 ,这样产 生的 电流与磁场就
() 2
J3 :
都 和定 子相绕组轴线重合。 因转子磁场定 向控制将公共坐标系 统建立 在转子定向磁场上 , d 即 轴与 转子磁链 矢量
在电气传动 中。 广泛地应用 S WM控制技术 。它是利用半 P 导体开关器件 的导通 和关 断把 直流电压等效为正弦 电压波形
的脉冲。对 电机而言 , 虽然定 子三相绕组电压按照 面积法则满 足正弦对称条件 。 但绕组中谐波成分较多 , 且直流 电源 电压 的 利用率较低。空 间矢量脉宽调制( v WM) 术在 电压 源逆变 SP 技 器供电的情况下 , 按照使三相电机 的定子产生跟踪 圆形旋转磁
三相静止坐标 系( , 。) ab c 到两相静止垂 直坐标系 ( /) , 的 3
非零 电压矢量幅值都为 2 d3 相位 角互差 ,3 并且将复平 面 U /, r, /
均分成六个扇 区, 对于任一扇 区中的电压矢量 u 均可 由该扇 。 区相邻两边的空 间电压矢量 ( U ̄ ) u、  ̄ o 6 来合成 。 使用电压空 间 矢量技 术的 目的就是将指令 电压矢量瞬态 由相应 的基本空 间
波 。 个基本电压空间矢量 的位置和大小见图 2所示 , 中有 6 8 其
个非零矢量 ( = ,, , , , ) 2个零矢量 ( 0U ) 6 x 12 34 5 6 和 U 、 7。 个
静止与 两相旋转 坐标系统如 图 3所示 , 为方便起见 。 图中取 轴与 a 轴重合 , 则它们间的转换形式如下。
3 基 于 S W M 的感应 电机 转子磁 场 定 向控 制 系统 VP
本 系统 中异步 电机三相绕组 采用 Y形联接 且不带零线 ,
二相旋转坐标 系( ,) dq到二相静止坐标 系 ( 卢 的变换 ( , ) 也
称反 P k变换 ) r a 表达 式为 :
() 1
式 中 l 分别为 、 x6 的作用时 间。如果 l 的 、 2 u 0 、 2 和小 于脉冲周期 , 则用静止 的零矢量 ( 0U ) u 、 7填充周期 内的
剩余时间。 零矢量作用时间里 , 磁链矢量末端是静止的 。 改变了 磁链的原有 旋转频率 , 而实现了变频。 从
矢量 合成 ,在脉 冲周期 时间内使逆变器的输 入端 电压 的平均
变换 ( 也称 Cak 变换 ) l e r 表达式为 :
收稿 日期 :0 7 1 - 2 20 — 0 0 作者简介 : 占(9 2 )男, 胡应 17 一 , 汉族 , 河南舞钢人 , 工业职业技术学院电气 工程系讲师 , 河南 河南理工大学硕士研究生 , 主要研究方 向为工业过程 微机控制 , 电气传 动。
维普资讯
Eq ime t u p n Ma u a t n e h oo y NO.2, 0 7 n f er g T c n lg i 1 2 0
基于 S P V WM的感应电机转子磁场 定向控制系统研究
胡 应 占 1, 征 ’陶海 军 ’ l郑 ,