自转旋翼机配平及操纵响应特性
三年级科学上册6.1《自转旋翼》 优秀课件1大象版

8 20 厘 米
1 厘 米
厘 米
20
1
厘 米
厘 米
13
10
厘 米
厘 米
• 1、翅膀长的下降得慢。 • 2、翅膀短的下降得慢。 • 3、两个自转旋翼同时落地。
实验要求:
• 1、两个自转旋翼都从同一高度,同 一时间放落。 • 2、自转旋翼的翅膀要与水平成同一 角度。 • 3、通过实验,完成下表,同时落地 写“0”,先着地的写“1”,后着地写 “2”。
大象版科学三年级
直升机
运输直升机
中国武直10武装直升机
美国阿帕奇武装直升机
提出问题: • 自转旋翼的翅膀大小与它的下 降速度有没有关系呢?
工具与材料:
1、长20厘米,宽4厘米的 长方形纸两张。 2、剪刀、直尺、铅笔、回 形针。
设计与制作:
4厘米 4厘米 5 厘 米
1、按右图要求, 在两张长方形纸 上画上实线和虚 线。 2、实线用剪刀 剪开,虚线折叠。
2、 -------是影响自转旋翼下降快慢 翅膀大小 的因素。
1、不要做刺猬,能不与人结仇就不与人结仇,谁也不跟谁一辈子,有些事情没必要记在心上。 2、相遇总是猝不及防,而离别多是蓄谋已久,总有一些人会慢慢淡出你的生活,你要学会接受而不是怀念。 3、其实每个人都很清楚自己想要什么,但并不是谁都有勇气表达出来。渐渐才知道,心口如一,是一种何等的强大! 4、有些路看起来很近,可是走下去却很远的,缺少耐心的人永远走不到头。人生,一半是现实,一半是梦想。 5、没什么好抱怨的,今天的每一步,都是在为之前的每一次选择买单。每做一件事,都要想一想,日后打脸的时候疼不疼。 6、过去的事情就让它过去,一定要放下。学会狠心,学会独立,学会微笑,学会丢弃不值得的感情。 7、成功不是让周围的人都羡慕你,称赞你,而是让周围的人都需要你,离不开你。 8、生活本来很不易,不必事事渴求别人的理解和认同,静静的过自己的生活。心若不动,风又奈何。你若不伤,岁月无恙。 9、与其等着别人来爱你,不如自己努力爱自己,对自己好点,因为一辈子不长,对身边的人好点,因为下辈子不一定能够遇见。 10、你迷茫的原因往往只有一个,那就是在本该拼命去努力的年纪,想得太多,做得太少。 11、有一些人的出现,就是来给我们开眼的。所以,你一定要禁得起假话,受得住敷衍,忍得住欺骗,忘得了承诺,放得下一切。 12、不要像个落难者,告诉别人你的不幸。逢人只说三分话,不可全抛一片心。 13、人生的路,靠的是自己一步步去走,真正能保护你的,是你自己的选择。而真正能伤害你的,也是一样,自己的选择。 14、不要那么敏感,也不要那么心软,太敏感和太心软的人,肯定过得不快乐,别人随便的一句话,你都要胡思乱想一整天。 15、不要轻易去依赖一个人,它会成为你的习惯,当分别来临,你失去的不是某个人,而是你精神的支柱;无论何时何地,都要学会独立行走 ,它会让你走得更坦然些。 16、在不违背原则的情况下,对别人要宽容,能帮就帮,千万不要把人逼绝了,给人留条后路,懂得从内心欣赏别人,虽然这很多时候很难 。 17、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭 18、不要太高估自己在集体中的力量,因为当你选择离开时,就会发现即使没有你,太阳照常升起。 19、时间不仅让你看透别人,也让你认清自己。很多时候,就是在跌跌拌拌中,我们学会了生活。 20、命运要你成长的时候,总会安排一些让你不顺心的人或事刺激你。 21、你的假装努力,欺骗的只有你自己,永远不要用战术上的勤奋,来掩饰战略上的懒惰。 22、成长是一场和自己的比赛,不要担心别人会做得比你好,你只需要每天都做得比前一天好就可以了。 23、你没那么多观众,别那么累。做一个简单的人,踏实而务实。不沉溺幻想,更不庸人自扰。 24、奋斗的路上,时间总是过得很快,目前的困难和麻烦是很多,但是只要不忘初心,脚踏实地一步一步的朝着目标前进,最后的结局交给 时间来定夺。 25、你心里最崇拜谁,不必变成那个人,而是用那个人的精神和方法,去变成你自己。 26、运气是努力的附属品。没有经过实力的原始积累,给你运气你也抓不住。上天给予每个人的都一样,但每个人的准备却不一样。不要羡 慕那些总能撞大运的人,你必须很努力,才能遇上好运气。 27、时间只是过客,自己才是主人,人生的路无需苛求,只要你迈步,路就在你的脚下延伸,只要你扬帆,便会有八面来风,启程了,人的 生命才真正开始。 28、每个人身上都有惰性和消极情绪,成功的人都是懂得管理自己的情绪和克服自己的惰性,并像太阳一样照亮身边的人,激励身边的人。
自转旋翼机飞行培训课件

自转旋翼机飞行培训课件自转旋翼机飞行培训课件自转旋翼机是一种具有独特飞行特性的飞行器,它通过旋转的主旋翼产生升力,并通过尾旋翼产生反扭力来保持平衡。
自转旋翼机的飞行控制和操纵相对复杂,需要飞行员经过专门的培训才能驾驶。
本文将介绍自转旋翼机飞行培训课件的内容,帮助读者更好地了解这一飞行器的飞行原理和操作技巧。
第一部分:自转旋翼机的基本概念和原理在自转旋翼机飞行培训课件的第一部分,将对自转旋翼机的基本概念和原理进行介绍。
首先,将介绍自转旋翼机的主要组成部分,包括主旋翼、尾旋翼、引擎和机身等。
然后,将详细解释主旋翼产生升力的原理,包括机翼效应、角动量守恒和迎角等概念。
同时,还会介绍尾旋翼产生反扭力的原理和作用。
第二部分:自转旋翼机的飞行控制系统在自转旋翼机飞行培训课件的第二部分,将介绍自转旋翼机的飞行控制系统。
首先,将介绍飞行员的操纵杆和脚蹬的作用,以及它们与飞行控制系统的联系。
然后,将详细介绍自转旋翼机的主控制面,包括主旋翼的可变旋翼桨叶和尾旋翼的可变尾旋翼桨叶。
同时,还会介绍自转旋翼机的稳定控制系统,包括自动稳定器和飞行控制计算机等。
第三部分:自转旋翼机的飞行特性和操作技巧在自转旋翼机飞行培训课件的第三部分,将介绍自转旋翼机的飞行特性和操作技巧。
首先,将介绍自转旋翼机的起飞和降落过程,包括垂直起降和短距离起降等。
然后,将详细介绍自转旋翼机的悬停和盘旋飞行技巧,包括悬停控制和盘旋半径的调整等。
同时,还会介绍自转旋翼机的巡航和高速飞行技巧,包括巡航速度和飞行姿态的调整等。
第四部分:自转旋翼机的飞行安全和应急处理在自转旋翼机飞行培训课件的第四部分,将介绍自转旋翼机的飞行安全和应急处理。
首先,将介绍自转旋翼机的飞行安全规定和标准,包括飞行员的资质要求和飞行器的检查要求等。
然后,将详细介绍自转旋翼机的应急处理技巧,包括发动机故障和系统故障的处理方法等。
同时,还会介绍自转旋翼机的紧急迫降和紧急撤离的程序和技巧。
四旋翼的平衡及方向的控制原理
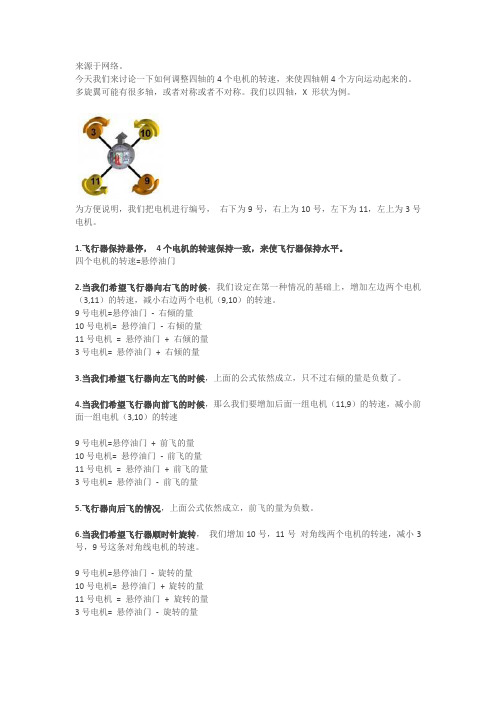
来源于网络。
今天我们来讨论一下如何调整四轴的4个电机的转速,来使四轴朝4个方向运动起来的。
多旋翼可能有很多轴,或者对称或者不对称。
我们以四轴,X 形状为例。
为方便说明,我们把电机进行编号,右下为9号,右上为10号,左下为11,左上为3号电机。
1.飞行器保持悬停,4个电机的转速保持一致,来使飞行器保持水平。
四个电机的转速=悬停油门2.当我们希望飞行器向右飞的时候,我们设定在第一种情况的基础上,增加左边两个电机(3,11)的转速,减小右边两个电机(9,10)的转速。
9号电机=悬停油门- 右倾的量10号电机= 悬停油门- 右倾的量11号电机= 悬停油门+ 右倾的量3号电机= 悬停油门+ 右倾的量3.当我们希望飞行器向左飞的时候,上面的公式依然成立,只不过右倾的量是负数了。
4.当我们希望飞行器向前飞的时候,那么我们要增加后面一组电机(11,9)的转速,减小前面一组电机(3,10)的转速9号电机=悬停油门 + 前飞的量10号电机= 悬停油门- 前飞的量11号电机= 悬停油门+ 前飞的量3号电机= 悬停油门- 前飞的量5.飞行器向后飞的情况,上面公式依然成立,前飞的量为负数。
6.当我们希望飞行器顺时针旋转,我们增加10号,11号对角线两个电机的转速,减小3号,9号这条对角线电机的转速。
9号电机=悬停油门 - 旋转的量10号电机= 悬停油门+ 旋转的量11号电机= 悬停油门+ 旋转的量3号电机= 悬停油门- 旋转的量7.当我们希望飞行器逆时针旋转,我们减小10号,11号对角线两个电机的转速,增加3号,9号这条对角线电机的转速。
继续使用上面的公式。
8. 最后,针对一个电机,它同时要负责前后左右和旋转的情况,那它就叠加了4种情况下的值:9号电机 = 悬停油门- 右倾的量 + 前飞的量 - 旋转的量10号电机= 悬停油门- 右倾的量 - 前飞的量 + 旋转的量11号电机= 悬停油门+ 右倾的量 + 前飞的量 + 旋转的量3号电机 = 悬停油门+ 右倾的量 - 前飞的量 - 旋转的量所以实现代码如下:#define PIDMIX(X,Y,Z) rcCommand[THROTTLE] + axisPID[ROLL]*X + axisPID[PITCH]*Y + YAW_DIRECTION * axisPID[YAW]*Z#ifdef QUADXmotor[0] = PIDMIX(-1,+1,-1); //REAR_Rmotor[1] = PIDMIX(-1,-1,+1); //FRONT_Rmotor[2] = PIDMIX(+1,+1,+1); //REAR_Lmotor[3] = PIDMIX(+1,-1,-1); //FRONT_L#endif一切对称,不对称的多旋翼布局都基于此理论,如果有爱的童鞋,可以补充解释Y3,Y6 ,V 尾的公式。
会飞的“竹蜻蜓”

很多人儿时的记忆里,常常浮现“竹蜻蜓”在空中旋转飞舞的影子,每个人都怀揣着像“竹蜻蜓”一样飞翔的梦。
如今,一群执著梦想、敢于创新的年轻团队,将一只大大的“竹蜻蜒”放飞,也放飞了他们的梦想这只大大的“竹蜻蜓”就是“彩虹”新型无人自转旋翼机。
近日,该机圆满完成了首次全自主飞行试验,在国际上也是大型自转旋翼机完全自主起降及空中飞行的首次试验(题图)。
西班牙人西尔瓦研制的c30自转旋翼机无人自转旋翼机是采用自转旋翼技术实现飞行的飞行器,之所以将其比作“竹蜻蜓”,是由于在飞行过程中,飞机两片大大长长的旋翼看上去很像放大的竹蜻蜓,而且它依靠前飞过程中空气气流持续的气动力使旋翼自转,从而维持旋翼转速并提供全机所需升力,这一飞行原理也同“竹蜻蜓”有着相似之处。
它除了机体顶部的旋翼外,还带有一副水平放置的螺旋桨以提供前进的动力,有的自转旋翼机还装有较小的机翼提供部分升力。
自转旋翼机不是由发动机驱动旋翼来提供升力的,而是在飞行过程中由前方气流吹动旋翼旋转产生升力的。
由于旋翼为自转式,传递到机身上的扭矩很小,因此自转旋翼机无需单旋翼直升机那样的尾桨,而采用类似固定翼飞机的尾翼,以实现稳定飞行。
何方神圣?实际上,有人驾驶的自转旋翼机出现较早,甚至早于直升机。
上世纪20年代,西班牙人西尔瓦为了设计一种不失速且具有低速起飞和降落功能的飞行器,将旋翼升力原理应用于飞行器,经反复试验研制出了带自转旋翼的一种新型飞行器,即自转旋翼机。
他于1934年成功地设计出c30自转旋翼机,并实现了跳跃起飞。
但随着西尔瓦的去世和直升机的兴起,自转旋翼机的发展跌入谷底。
自转旋翼机与直升机相比最大的劣势在于不能悬停,这是其沉寂多年的主要原因。
然而,自转旋翼机所具有的技术优势没有被航空界忘记,特别是该机型具有更高的安全性和经济性,因而在近十几年得到了迅速发展。
技术优势何在?有人驾驶的自转旋翼机在国内外的广泛生产和应用唤起了人们对这一机型的重新认识。
DIY旋翼机(AUTOGYRO)参考资料

帮想自行DIY旋翼机的飞友稍微整理了一下资料出处/technic/specs.htm飞机重心為旋翼头的位置其实跟固定翼飞机很像, (固定翼飞机重心為主翼前缘向后三分之一)成品图出处/cgallery.php?id=13机身做法跟固定翼飞机相同, 甚至还有人做成两用的.飞机控制方法有两种, 也可以混合使用操控性更佳.1. 只控制垂直尾翼跟水平尾翼, 旋翼部份都不动, 跟没有副翼的固定翼飞机相同2. 只控制旋翼前后俯仰跟左右倾, 与直昇机相同.3. 混合两种方式, 有多种组合, 两种全都用或是方向舵用垂直尾翼, 升降舵用旋翼控制等等桨的长度宽度產生的浮力跟机身重量有关请参考/technic/chart~1.htm马达前拉的推力请参考/technic/rick_2.htm旋翼的製作请参考/technic/c-wblade.htm/technic/blades/smith_blades.htm 桨的长宽比约為10比1翼型克拉克Y国外RC讨论区网站DIY相关资料有完整的製作过程跟飞行影片机身可以改用珍珠板做, 动力当然改电动无刷其他都一样/forums/ ... mp;page=1&pp=12这个动力改电的也可以, 一样所有製作过程都有包含桨跟旋翼头的控制机构/models/min-2.htm日本人DIY的各式旋翼机seek.co.jp/rc2_O_Gyro.html做人要厚道,转载请注明来自科技论坛:tech-domain查看 dymodel 的资料给 dymodel 发送邮件浏览 dymodel 的主页搜索 dymodel 的帖子将 dymodel 加为好友将该帖子加入收藏夹将该论坛加入收藏夹2007-2-8 11:23:32#2dymode l师长角色:超级版主发帖数:130 61经验值:405 63注册时间:200 6-11-2 联系收藏编辑删除Re:DIY旋翼机(AUTOGYRO)参考资料旋翼机乍一看,旋翼机和直升机简直一模一样:它们头顶都有一副大直径的旋翼,在飞行中依靠旋翼的旋转產生升力。
旋翼机自转旋翼气动特性及跳飞性能研究
( 15)
旋翼机像定翼飞机一样 , 有最小飞行速度, 只有 大于该速度 , 旋翼机才能不掉高度稳定自转飞行。旋 翼机跳跃式起飞阶段从预转旋翼、 断开离合器提总距 开始, 一直到在空中前飞爬升达到最小飞行速度 , 能 稳定自转( Q = 0, F z = Gw ) 飞行为止。最小飞行速度 可以通过旋翼机供需能量平衡计算得出 , 只要超过最 小飞行速度 , 旋翼机就可以通过操纵周期变距杆和油 门实现定常飞行。
( c) 阻转减速区域气动力
A= H 0+ (
r - 0. 7) H t + H 1 c sin 7 - H 1 s cos 7 + R H ( 9) 2( i ) + H 3 ( i ) + arctan( UP / UT )
式中 H 0 为总距角 , H t 为负扭角 ( 旋翼机的桨叶一般无 负扭角 ) , H 横向周期变距。桨叶上 1c 和 H 1 s 分别为纵、 第 i 个剖面的倾角操纵线系变形引起的倾角改变为 H 2 ( i ) , 桨叶扭转变形为 H 3( i) 。 根据桨叶翼型升阻特性数据, 即 A -C l 及 A -C d 关 系 , 由得到的 A 值, 计算翼型升 力系数 C l 和 翼型阻
跳飞时旋翼机运动是水平和垂直两个方向的合 运动。此时旋翼机离开了地面在水平方向作变加速 前飞运动, 而旋翼则处于自转加速状态 ; 旋翼机垂直 方向的运动是向上的变减速运动, 在不考虑水平相对 气流带来影响的前提下, 旋翼为自转减速状态。 以前面所述自转旋翼气动模型为基础建立该过 程的数学模型, 先计算某时刻 T i 旋翼来流 : L1 L2 @ 8R = L3 cos H y 0 - sin H y 1 0 0 0 cos H x sin H y 0 sin H x cos H x VFX VFY VFZ
飞机滚转配平力矩
飞机滚转配平力矩1.引言1.1 概述飞机滚转配平力矩是飞行力学中的一个重要概念。
在飞机进行滚转运动时,需要通过调整配平力矩来保持飞机的平稳和平衡。
飞机的滚转运动是指飞机绕纵轴旋转,即机身从一侧倾斜到另一侧。
这个过程中,由于重心位置的变化以及气动力的变化,会产生一个被称为滚转力矩的扰动,而飞行员需要通过调整配平力矩来抵消这个扰动,保持飞机的平衡姿态。
配平力矩可以通过调整飞机的配平舵面来实现。
同时,配平力矩还可以影响飞机的滚转操纵性能和操纵稳定性。
因此,研究和了解飞机滚转配平力矩对于提高飞行安全性和飞机性能具有重要意义。
在本文中,我们将从飞机滚转的基本原理和配平力矩的概念和作用两个方面进行讨论,进一步探究飞机滚转配平力矩的重要性。
1.2文章结构文章结构主要包括引言、正文和结论三个部分。
引言部分主要对本篇文章进行概述,介绍文章的主题和背景,引起读者的兴趣。
同时,引言部分应该明确文章的目的和结构。
正文部分是文章的核心部分,主要论述飞机滚转配平力矩的相关内容。
其中,2.1部分将介绍飞机滚转的基本原理,包括滚转运动的定义、产生滚转运动的力矩以及滚转运动对飞机的影响等内容。
2.2部分将详细阐述配平力矩的概念和作用,包括配平力矩的定义、产生配平力矩的原因以及配平力矩对飞机滚转的调节作用等内容。
正文部分需要结合相关理论知识和实例,进行详细的分析和解释,以清晰地表达文章的主题。
结论部分是对整篇文章进行总结和归纳。
在这一部分,将强调飞机滚转配平力矩的重要性,总结正文部分的观点和分析,明确飞机滚转配平力矩的实际应用价值,并提出进一步的研究方向和展望。
通过以上结构的划分,读者可以清晰地了解文章的组织框架,方便快速获取所需信息,提高文章的可读性和理解度。
1.3 目的:本文的目的是探讨飞机滚转配平力矩的概念、作用以及其重要性。
通过分析飞机滚转的基本原理和配平力矩的作用,我们将深入理解这一概念对飞机的飞行稳定性和操纵性的影响。
飞行器仪表原理、塔块的作用、自转旋翼飞行器、关于旋翼机垂直起飞的解释、关于旋翼机旋翼的旋转
飞行器仪表原理转自/thread-2391-1-14.html空速管也叫皮托管,总压管,风向标气流方向传感器或流向角感应器,与精密电位计(或同步机或解析器)连接在一起,提供出一个表示相对于大气数据桁架纵轴的空气流方向的电信号.主要是用来测量飞机速度的,同时还兼具其他多种功能。
空速管测量飞机速度的原理是这样的,当飞机向前飞行时,气流便冲进空速管,在管子末端的感应器会感受到气流的冲击力量,即动压。
飞机飞得越快,动压就越大。
如果将空气静止时的压力即静压和动压相比就可以知道冲进来的空气有多快,也就是飞机飞得有多快。
比较两种压力的工具是一个用上下两片很薄的金属片制成的表面带波纹的空心圆形盒子,称为膜盒。
这盒子是密封的,但有一根管子与空速管相连。
如果飞机速度快,动压便增大,膜盒内压力增加,膜盒会鼓起来。
用一个由小杠杆和齿轮等组成的装臵可以将膜盒的变形测量出来并用指针显示,这就是最简单的飞机空速表。
现代的空速管除了正前方开孔外,还在管的四周开有很多小孔,并用另一根管子通到空速表内来测量静止大气压力,这一压力称静压。
空速表内膜盒的变形大小就是由膜盒外的静压与膜盒内动压的差别决定的。
空速管测量出来的静压还可以用来作为高度表的计算参数。
如果膜盒完全密封,里面的压力始终保持相当于地面空气的压力。
这样当飞机飞到空中,高度增加,空速管测得的静压下降,膜盒便会鼓起来,测量膜盒的变形即可测得飞机高度。
这种高度表称为气压式高度表。
利用空速管测得的静压还可以制成"升降速度表",即测量飞机高度变化快慢(爬升率)。
表内也有一个膜盒,不过膜盒内的压力不是根据空速管测得的动压而是通过专门一根在出口处开有一小孔的管子测得的。
这根管子上的小孔大小是特别设计的,用来限制膜盒内气压变化的快慢。
如果飞机上升很快,膜盒内的气压受小孔的制约不能很快下降,而膜盒外的气压由于有直通空速管上的静压孔,可以很快达到相当于外面大气的压力,于是膜盒鼓起来。
一种新型无人自转旋翼机
一种新型无人自转旋翼机孙瑜,王道波(南京航空航天大学自动化学院,南京 210016)基金项目:江苏省研究生培养创新工程(SJLX16_0100);研究生创新基地(实验室)开放基金(kfjj20160323)作者简介:孙瑜(1990—),男,硕士研究生,主要从事无人机控制系统研究。
本文引用格式:孙瑜,王道波.一种新型无人自转旋翼机[J].兵器装备工程学报,2017(7):82-84.Citation:format:SUN Yu, WANG Daobo.A New Type of Auto-Rotating Rotor UAV[J].Journal of Ordnance Equipment Engineering,2017(7):82-84.摘要:设计了一种动力装置采用矢量推力技术的无人自转旋翼机,提高了机动性,降低了起飞距离,解决了自转旋翼机巡航速度较低等问题;提出一种可促进自转旋翼机机体在军民中的有效应用的双回路混合控制方法。
关键词:自转旋翼机;矢量推力技术;混合控制;新构型无人机自转旋翼机的出现要早于直升机十几年,20世纪20年代问世的自转旋翼机C-3,最先实际应用是旋翼升力原理,自转旋翼机在20世纪三四十年代曾被大量使用,后因直升机发展迅速,自转旋翼机慢慢退出了人们的视野,由于自转旋翼机具有结构简单、成本低、安全性好、操纵简单等特点,近年来再次引起航空界的关注,被广泛地应用在军事领域。
进入21世纪以来自转旋翼机方面的研究又有了长足的进展[1]。
尽管常规自转旋翼机的研究在现有的理论基础上已比较成熟[2-3],但是由于其结构和动力上的特点,常规自转旋翼机巡航速度较低、机动性差,在军用、民用领域都受到极大限制。
为解决上述问题,目前采用最多的是倾转旋翼方法[4]。
虽然倾转旋翼无人机可以有效地解决以上问题,但是其结构相当复杂,并且降低了机型的安全性和稳定性。
矢量推力技术对载人飞机的隐身性、机动性的改善已被广泛验证,矢量推力技术的应用已成为无人机发展的重要趋势。
自转旋翼机纵向静稳定性影响要素研究
自转旋翼机纵向静稳定性影响要素研究作者:李继伟来源:《卷宗》2020年第08期摘要:研究自转旋翼机影响纵向静稳定性的要素,包括飞行速度、平尾大小、平尾安装角、重心前后、重心上下等。
通过计算得到主旋翼的气动力数据库,然后简化机体模型,综合得到全机的气动力数据。
配平各个速度下不同要素,组合计算得到各要素对纵向静稳定性的影响。
关键词:自转旋翼机;重心范围;平尾;静稳定性自转旋翼机(Autogyro)是一种起降和飞行方式介于固定翼飞机和直升机之间的一种飞行器。
它以旋翼作为升力面、以发动机螺旋桨为前进动力。
它兼有直升机和固定翼飞机的特点,具有良好的经济性、且结构简单、安全性好,滑跑距离短,对跑道要求很低,在短草地、平坦土路都可以起降,在使用上不需要专用机场,有些安装可变总距机构或者旋翼桨尖喷气的复杂旋翼机甚至可以实现垂直起降。
目前在运动、娱乐、观光体验等飞行方面越来越受欢迎,再次成为航空领域关注的热点。
本文选用Autogyro公司的MT03型旋翼机为研究对象。
MT03自转旋翼机外形见图1,为简化计算,将座舱进行封闭做椭圆机身处理,机身作用仅考虑一个阻力,简化模型见图2。
1 旋翼机气动力自转旋翼机的气动建模,考虑到自转旋翼机的主旋翼与机体之间距离较远,且主旋翼的下压气流相对前向来流小一个量级,故主旋翼与机体之间可以不考虑气动干扰。
主旋翼的计算基于叶素理论、采用数值积分的方法,再引入Pitt-Peters动态入流,结合动量方程,最终建立自转旋翼气动计算模型。
机体部分可以采用常规固定翼方式,利用CFD進行整体气动力计算,最终通过修正螺旋桨滑流对垂尾和方向舵的影响,得到完整的全机气动力模型。
1.1 主旋翼气动力采用叶素理论,通过Pitt-Peter动态入流模型计算旋翼诱导速度,同时应结合自转旋翼跷跷板式桨毂的特点考虑旋翼的非定常挥舞运动。
整个建模过程与直升机旋翼的建模相似,但需注意跷跷板式桨毂会抵消不对称力矩,且来流方向和桨盘迎角的定义与直升机也有所区别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自转 旋 翼 机 配 平 及 操 纵 响应 特 性
陆 洋 李 建 波 朱 清 华
( 京航 空航 天 大 学 直 升 机 旋 翼 动 力 学 国家 级 重 点 实 验 室 , 京 ,1 0 6 南 南 20 1)
摘要 : 分析 了 自转 旋 翼 机 不 同于 直 升 杌 的 特 点 , 考 虑 了 自转 旋 翼 机 旋 翼 转 速 可 变 , 旋 桨 、 尾 / 尾 气动 力 的 在 螺 垂 平
中 图分 类 号 : l . 2 V2 1 5 文献标识码 : A 文章 编 号 :0 5 2 1 ( 0 8 0 - 5 7 0 1 0 — 6 5 2 0 ) 50 7 - 6
Tr m nd Co r lRe p ns i a nt o s o e Cha a t r s i s o r c e i tc f Au o y o tg r
c nt o e po e,i hewho e fi p e a o r lr s ns nt l lghts e d r nge,t tiu ng e fau o yr ha e s al,e pe il he a tt de a l s o t g o c ng m l s ca — l h t h a l .Thec ntole fc e c he l t r lc c i t h ng ofa o yr s smia o t toft e y t e pic ng e o r fii n y oft a e a y lcpic i ut g o i i l rt ha h
小 ; 飞 行 速 度 范 围 内姿 态 变化 很 小 , 其 是 纵 向 俯 仰 角 ; 全 尤 自转 旋 翼 机 的 横 向 周 期 变距 操 纵 功 效接 近 直升 机 , 纵 向周 期 变距 操 纵 功效 小 于 直升 机 , 方 向 舵 的 航 向 操 纵 功 效 比直 升 机 小很 多 。 而 关键词 : 自转 旋 翼 机 ; 飞行 动 力 学 ; 平 ; 纵 响 应 配 操
基 础 上 , 立 了 自转 旋 翼 机 的 飞 行 动 力 学模 型 。在 此基 础 上 , 据 某 中型 旋 翼 机 基 本 参 数 , 该 机 进 行 了配 平 及 建 根 对
操 纵 响 应 特 性计 算 。 析 结 果 表 明 : 分 自转 旋 翼 机 的 油 门 开度 随 前 飞 速 度 增 加 单 调 递 增 , 向 舵 舵 角 的 变化 幅度 较 方
z ont lt i a r o c s a d mome s,t e ma h m a i a a al e of r e n nt h te tc lmod lo ut y o fi htdy mis i it e fa og r lg na c sbu l .Ba e sd
L n u Ya g,LiJ a b i n o,Zh n h a uQig u
( t n lKe b r tr fRo o c atAeo c a is Nai a yLa o ao yo tr r f o r me h nc ,Na i gUn v riyo r n u is& Asr n u is ni ie st fAeo a t n c to a tc ,
第4 O卷 第 5 期 20 0源自8年 1 O月 南京
航
空
航
天
大
学
学
报
V o .4 o.5 1 0N oc. 2 8 t 00
J u n lo ni g Unv r iyo r n u is& As r n u is o r a fNa j ie st fAe o a tc n to a tc
O h d l c o d n O t e p r m e e s o d u t p u o y o,t e t i a d c n r l r s o s n t e mo e ,a c r i g t h a a t r f a me i m y e a t g r h rm n o t o e p n e c a a t r tc r a c l t d Th a c l to e u t h w h twih t e i c e s ft e f r r p e h r c e i is a e c l u a e . s e c l u a i n r s l s o t a t h n r a e o h o wa d s e d, s t e t i v l e f h h o t n e n r a em o o o o sy,a d t e r d e n l h n e ma 1 h rm a u so et r tl i d x i c e s n t n u l t e n h u d ra g ec a g ss l.Fo h rt e
Na j g 1 0 6 C ia ni ,2 0 1 , hn ) n
Ab t a t Th i e e c s o l h y a c h r c e i t s b t e h u o y o a d t e h l o t r a e s r c : e d f r n e ffi td n mis c a a t rs i e we n t e a t g r n h ei p e r f g c c d s u s d fr t .Co sd rn h a i b e r t tn p e fa t g r ic s e is l y n i e i g t e v ra l o a i g s e d o u o y o,p o e l r e t a a la d h r— r p l ,v ri lt i n o i e c