负载牵引的基础知识
负载牵引的基础知识
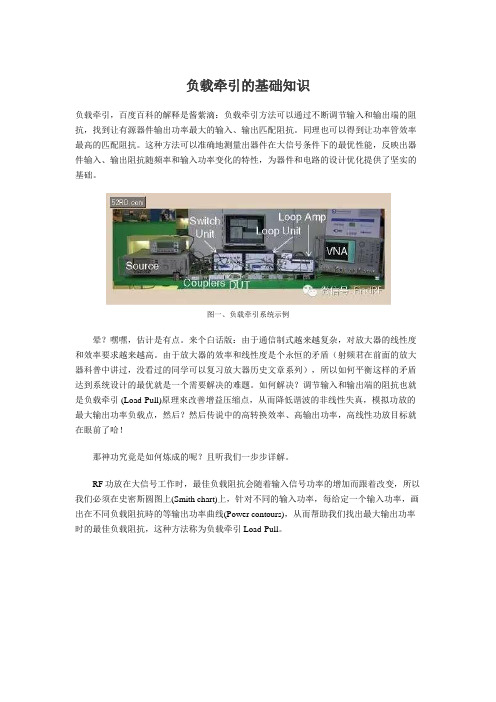
负载牵引的基础知识负载牵引,百度百科的解释是酱紫滴:负载牵引方法可以通过不断调节输入和输出端的阻抗,找到让有源器件输出功率最大的输入、输出匹配阻抗。
同理也可以得到让功率管效率最高的匹配阻抗。
这种方法可以准确地测量出器件在大信号条件下的最优性能,反映出器件输入、输出阻抗随频率和输入功率变化的特性,为器件和电路的设计优化提供了坚实的基础。
图一、负载牵引系统示例晕?嘿嘿,估计是有点。
来个白话版:由于通信制式越来越复杂,对放大器的线性度和效率要求越来越高。
由于放大器的效率和线性度是个永恒的矛盾(射频君在前面的放大器科普中讲过,没看过的同学可以复习放大器历史文章系列),所以如何平衡这样的矛盾达到系统设计的最优就是一个需要解决的难题。
如何解决?调节输入和输出端的阻抗也就是负载牵引 (Load-Pull)原理來改善增益压缩点,从而降低谐波的非线性失真,模拟功放的最大输出功率负载点,然后?然后传说中的高转换效率、高输出功率,高线性功放目标就在眼前了哈!那神功究竟是如何炼成的呢?且听我们一步步详解。
RF功放在大信号工作时,最佳负载阻抗会随着输入信号功率的增加而跟着改变,所以我们必须在史密斯圆图上(Smith chart)上,针对不同的输入功率,每给定一个输入功率,画出在不同负载阻抗時的等输出功率曲线(Power contours),从而帮助我们找出最大输出功率时的最佳负载阻抗,这种方法称为负载牵引Load-Pull。
以典型的晶体管设计为例,首先大家会如何来做阻抗匹配?当然是借助传说中的ADS 等仿真工具。
由于晶体管工作在接近饱和区和线性区交界时,它的AC Load Line会随着输入信号的增加而改变,尤其S21参数会随着输入信号的增加而变小,因此转换功率增益会因为晶体管工作在饱和区被压缩(传说中的功率压缩的概念由此得来)。
因此,原来的晶体管在小信号状态下,输入/输出端都是设计在共轭匹配的。
增益最大化的情况下,如果一旦晶体管位于饱和区工作的时候,输出功率的最佳负载阻抗匹配点就会变动,所以晶体管就无法得到最大的功率输出。
牵引相关知识52页PPT
۩ 牵引的重量
➢ 跟骨牵引
体重的1/12
➢ 胫骨结节牵引 体重的1/7
➢ 股骨髁上牵引 体重的1/7
➢ 牵引重量应根据病情需要调节,不可随意增减
➢ 重量过小,不利于骨折复位或畸形矫正
➢ 重量过大,可导致过度牵引,造成骨折不愈合
۩ 牵引的时间和体位
➢牵引的时间 不超过八周 ➢牵引的体位 使病人仰卧,放正骨盆
颅骨牵引日常观察
➢ 颅骨牵引效能 轴线正确、重量适宜、体位合理
➢ 并发症的观察 针眼感染
压疮(骨突部位尤其是枕部)
过牵综合症
牵引过度导致的血管、神经损伤 易伤及的神经、血管主要有舌下神经、臂丛神经、脊髓、肠系膜上动脉等 表现出相应的神经、血管受损症状。如舌下神经过牵表现为吞咽困难,伸 舌时舌尖偏向患侧;臂丛神经过牵表现为一侧上肢麻木)
牵引的分类
♪ 短时牵引:手法复位
♪ 持续牵引:皮,是指使用胶布或皮套等包 裹患侧肢体进行牵引,进而维持骨折的复位和 稳定
➢ 其牵引力通过皮肤、筋膜、肌肉,间接达于骨或关节 ➢ 主要用于儿童、老年人的四肢骨折及关节炎症时矫正 ➢ 牵引重量<5公斤 ➢ 牵引时间<2-4周(胶布拉脱或皮肤撕伤)
•
26、我们像鹰一样,生来就是自由的 ,但是 为了生 存,我 们不得 不为自 己编织 一个笼 子,然 后把自 己关在 里面。 ——博 莱索
•
27、法律如果不讲道理,即使延续时 间再长 ,也还 是没有 制约力 的。— —爱·科 克
•
28、好法律是由坏风俗创造出来的。 ——马 克罗维 乌斯
•
29、在一切能够接受法律支配的人类 的状态 中,哪 里没有 法律, 那里就 没有自 由。— —洛克
牵引变电基础知识

三、换向器———将直流电流变成电枢绕组中的交流电流.
51、直流电动机按励磁绕组的联接方式不同有几种?
答:有四种:他励电动机、串励电动机、并励电动机、复励电动机.
52、请画出互感器作用原理示意图.
答:
53、从能量转换角度来说,发电机与电动机的区别的什么?
答:发电机是将机械能转换为电能;电动机是将电能转换为机械能.
答:正弦交流电的有效值就是与它热效应相等的直流电之值.人们日常所言的交流电压,电流,电动势既指它的有效值.
有效值与最大值的关系是:
最大值= 有效值
20、什么是正弦交流电的平均值?它与最大值的关系如何?
答:正弦交流电在半个周期内,在同一个方向通过导体横截面的电量与半个周期时间的比值,叫做正弦交流电在半个周期内的平均值.用IP,
P= u相I相cos∮
Q= u相I相sin∮
S= u相I相
cos∮=P/S
如果三相负载不对称,则应分别计算各相功率,各相功率之和为三相功率.
41、在三相四线制系统中,中性线断开将会如何?
答:在三相四线制系统中,中性线是不允许断开的,如果中性线断开,这时线电压虽对称,但各相负载不平衡而使其承受的相电压不再对称,电阻大的负载承受的电压高于额定电压,而电阻小的负载承受的电压低于额定电压,导致负载不能正常工作,以致烧毁造成事故.
答:两根平行通电导体的电流方向相同时,导线产生的电磁力相互吸引;而两根平行通电导体的电流方向相反时,导线产生的电磁力相互排斥.
先用右手螺旋定则判断出单根通电导线产生的磁场方向,再用左手定则判断出导体在彼此磁场中的受力方向即知.
12、什么是磁路欧姆定律?
答:磁路中的磁通量¢与产生该磁通的磁势F成正比,与整个磁路的磁阻Rm成反比,即:¢=F/Rm.
牵引电机培训教材
目录第一节. 牵引电机简介 (1)1.系统简介 (1)1.1结构 (1)1.2规格 (1)2.各组成部工作原理 (2)2.1牵引电机内部结构 (2)2.1.1定子 (2)2.1.2转子 (3)2.2牵引电机工作原理 (3)2.2.1基本原理 (3)2.2.2旋转磁场的产生 (4)2.2.3旋转磁场的方向 (5)3.知识扩展 (6)第二节. 实操训练 (6)1.重点部位检查 (6)2.相关数据测量 (6)3.维修实操流程 (6)牵引电机第一节. 牵引电机简介1.系统简介牵引电机为三相四线制鼠笼式电动机。
每两台电机分别横向安装于同一转向架的两轴上。
牵引电机说明如下:1.1结构牵引电动机能承受雨、雪、风、沙的侵袭并安全运行。
定子、转子铁芯的导磁叠片采用高导磁率、低损耗的冷轧电工钢片冲制。
转子转轴用适当强度的优质合金钢加工而成。
定子绕组及其引线采取能防霉、防虫、防啮齿类动物和其它有害动物的有效措施。
轴承的密封和润滑在类似的牵引电动机上经过长期运行考核证明是良好的系统。
轴承盖上的加油嘴能方便地加入油脂,轴承采用优质润滑脂进行润滑。
带有轴温自动检测功能。
牵引电动机采用自通风空气冷却方式。
具有良好的空气滤尘功能。
进风口处安装风阻小、防护和滤尘效率高的防护网和滤尘器。
滤尘器的结构设计便于清洗。
1.2规格●一小时额定值180kW-550V-240A●绝缘等级200●最大运行转速2355rpm(大约)●轮径φ840mm(新轮)φ805mm(半磨损)φ770mm(全磨损)齿轮传动比131/17=7.712.各组成部工作原理2.1牵引电机内部结构三相异步电动机的两个基本组成部分为定子(固定部分)和转子(旋转部分)。
此外还有端盖、风扇等附属部分,如图1所示。
图1三相电动机的结构示意图2.1.1定子三相异步电动机的定子由三部分组成:2.1.2转子三相异步电动机的转子由三部分组成:2.2牵引电机工作原理2.2.1基本原理为了说明三相异步电动机的工作原理,我们做如下演示实验,如图2所示。
谐波阻抗负载牵引

谐波阻抗负载牵引
负载牵引是一种测量技术,其中被测件的负载阻抗在基波频率f0或任何谐波频率(主要是2f0、3f0)上呈现。
在大信号工作时,最佳负载阻抗会随着输入信号功率的增加而变化。
因此,必须在史密斯圆图上针对不同的输入功率,每给定一个输入功率,画出在不同负载阻抗时的等输出功率曲线,从而找出最大输出功率时的最佳负载阻抗。
这种方法称为负载牵引。
负载牵引系统可以测量射频微波器件及功率芯片在不同源阻抗及负载阻抗下的各种工作参数。
负载牵引在无线通信、雷达和电子战等领域中具有广泛应用。
在这些领域中,系统性能通常受到发射机和接收机之间阻抗匹配程度的影响。
通过使用负载牵引技术,可以精确测量和确定最佳的阻抗匹配,以提高系统的效率和性能。
在实施负载牵引时,通常需要使用网络分析仪来测量被测件的阻抗。
网络分析仪可以测量被测件的反射系数和传输系数,从而得到被测件的阻抗。
通过改变被测件的负载阻抗,可以观察其对系统性能的影响,并找到最佳的负载阻抗。
除了测量阻抗之外,负载牵引还可以用于测试和优化其他电子器件的性能。
例如,通过改变射频功率放大器的负载阻抗,可以观察其对增益、效率和失真等性能的影响,并找到最佳的负载阻抗。
此外,负载牵引还可以用于测试和优化数字信号处理器的性能,以优化其信号处理能力和功耗。
总之,负载牵引是一种重要的测量技术,可以用于优化电子器件的性能和提高系统的效率。
随着无线通信和雷达等领域的不断发展,负载牵引技术将继续发挥重要作用。
功率放大器设计中的负载牵引技术

负载牵引技术在功率放大器设计中是一种重要的技术手段,它主要用于评估放大器对预期负载的功率放大能力。
这种技术的主要步骤包括:
1. 明确预期负载:这是负载牵引技术的第一步,你需要明确你想要测试的功率放大器对哪种类型负载的放大能力,例如,纯电阻负载、感性负载,还是容性负载。
2. 制定测试方案:根据预期负载的类型,设计合适的测试方案。
这可能包括选择适当的测试设备、设置测试参数、确定测试步骤等。
3. 实施测试:按照制定的测试方案,进行实际的测试操作。
在测试过程中,你需要记录并分析测试数据,以评估功率放大器的性能。
4. 结果评估:根据测试数据,评估功率放大器对预期负载的放大能力。
如果测试结果满足设计要求,那么你就完成了负载牵引。
如果结果不符合预期,你可能需要进一步优化设计,或者重新选择预期负载。
这种技术对于优化功率放大器的性能,确保其在各种实际应用中的表现,具有重要的指导意义。
在设计过程中,你可能还需要考虑其他因素,如电路设计、散热设计、电源管理、抗干扰能力等。
ADS中负载牵引的一些心得
ADS中负载牵引的一些心得加入ADS群半年多来,不时在群里面碰到有人问做负载牵引时出现的不收敛问题,虽然自己也自告奋勇的出来聊几句,奈何自己的文采有限,无法说清楚这个问题。
其实我自己半年前也曾为此问题困扰一个星期之久,幸好有群里面的流星和羽纤二位大哥的指点,二位大哥对我在ADS操作和射频微波功放方面的困惑进行了无私的指点,加快了我完成了雷达发射机的研制进程,对此我深表感谢。
前些时候,群里面部分同样如我半年前一样在负载牵引上遇到困惑的人邀请我写一个实例,用这个实例来说明如何解决负载牵引中碰到的不收敛问题,由于这几天我刚接手了另外两个雷达发射机的研制项目,一直没有抽出足够的时间来写,今天有时间就做个注解,写得不好,不要介意,但愿本文档对一些刚入门的新手在碰到负载牵引时出现的不收敛问题能提供一些帮助。
下面我以freescale的新一代功放管MRF6V2300作为例子来说明负载牵引问题。
MRF6V2300是freescale推出的新一代功放管,CW输出功率为300W,额定漏工作电压为50V,工作频率为10-600MHz,价格仅500元一只,是米波雷达和广播电视发射机的廉价实用管子。
其DATASHEET上提供了三个典型的频率点的输入和输出阻抗:27MHz,220MHz,450MHz。
参考静态偏置电压典型值为2.6V时,其静态偏置电流典型值是900mA,因为比较容易,这里面我不作静态电流的仿真了,直接采用静态偏置电压2.6V(ADS 仿真结果是919mA)。
先仿真频点f1=27MHz,datasheet上显示其输出负载Z load=3.50+j*0.19。
我们打开ADS,新建一个空白原理图,在其工具栏的DesignGuide上点击下拉菜单中选择Amplifier点1-Tone Nonlinear Simulations展开,选择Load-Pull-PAE,Output Power Contours然后点击OK按钮就行了,出来如图1-1所示的原始原理图和图1-2所示的原始仿真图:图1-1 Load-Pull 原始原理图图1-2 Load-Pull 原始仿真图对图1-1,我们首先更换管子成我们要测试的MRF6V2300N,把两个图标都换上,然后输入功率Pavs改成20dBm,频率RF freq改成27MHz,漏电压Vhigh 改成50,栅压(偏置电压)改成2.6,其它都不变,如图1-3所示:图1-3 更换成MRF2300N后的原理图这里面输入功率之所以选择20dBm是因为在这么的频率,其输入输出阻抗都比较大,其增益很高,稍微大点其输出就饱和了,有可能会导致不收敛,不利于以后的调整,接着点仿真按钮,结果如图1-4所示:图1-4 换成MRF6V2300N后的仿真图从图1-4可以看到,在输入为20dBm的情况下,其输出已经达到了53.79dBm了,这离其典型输出功率300W(54.7dBm)已经很接近,但我们从图1-4的左下角的坐标图中看到其功率圆和效率圆的圆心都没有显示出来,对图1-4左下角的坐标图局部放大如图1-5所示:图1-5 左下角坐标图局部放大图从图1-5中,我们可以看出,其功率圆和效率圆的圆心在图的正左方,我们重新设定图1-1中原始图的圆心,我们大胆猜测其圆心s11_center为-0.75+j*0.0,半径s11_rho为0.2,并将采样点数改为500,如图1-6所示:图1-6 重新设置圆心和采样点数为何半径要设置成0.2呢?而不是0.3或者更大呢?大点不是好吗?半径大点能把所有可能的情况都仿真进去,何乐而不为呢?不行!因为要撑破的!一个原则是你仿真的范围不能超过1!也就是你坐标圆的圆心加半径不能超过1!为保险起见,二者之和最大为0.99!2+(0.0)2]0.5+0.2≤0.99,个人喜欢两者之和为0.99,因为某些也就是说[(-0.75)管子输出功率很大,其输入输出阻抗很小,不到0.99功率圆和效率圆可能没出来!如本例,如果半径是0.3的话,就不收敛了!为何采样点数为500?这个···那个···纯属个人喜好,如果你喜好,你也可以改成1000,不过这样你的电脑反应速度就慢了,电脑差点,单核的话可能要花好几分钟时间。
负载牵引法原理
负载牵引法原理全文共四篇示例,供读者参考第一篇示例:负载牵引法原理,又称为拉引法,是指在牵引物体的过程中,由一辆车辆用绳、链等装置将另一辆车辆或者物体移动起来的一种物理现象。
负载牵引法是一种简单有效的牵引方法,广泛应用于农业、建筑、运输等领域。
负载牵引法的原理是利用牵引车辆对被牵引物体施加拉力,使得被牵引物体产生受力,从而实现牵引的目的。
在负载牵引中,牵引车辆和被牵引物体之间通过绳、链等连接装置相连,当牵引车辆向前移动时,绳、链传递力量,施加在被牵引物体上,从而产生运动。
牵引车辆需要克服被牵引物体的摩擦力和惯性力,才能使被牵引物体移动起来。
负载牵引法的原理可以用牛拉车为例来解释。
在古代,人们利用牛拉车来运输货物,牛是牵引车辆,车是被牵引物体。
当牛向前走的时候,通过挽具将车和牛相连接,牛的拉力通过挽具传递给车,车受到力的作用而移动起来。
牛需要克服地面的摩擦力和车的惯性力,才能使车顺利移动。
这就是负载牵引法的基本原理。
除了牛拉车外,现代社会中还有许多应用负载牵引法的例子。
汽车拖车、拖拉机拉拖、吊车吊重物等,都是利用负载牵引法来实现牵引作业。
在建筑工地上,工人们经常使用吊车将重物吊运到目标位置,这也是负载牵引法的应用之一。
负载牵引法在实际应用中有着广泛的用途。
它不仅可以帮助人们进行货物运输,还可以用于农业作业、建筑施工、汽车拖带等场合。
通过合理的设计和操作,负载牵引法可以有效提高工作效率,减少人力和物力的浪费,提升生产效益。
负载牵引法也存在一些限制和安全隐患。
在实际操作中,需要考虑牵引车辆和被牵引物体的重量、地面的摩擦情况、牵引装置的强度等,以确保牵引过程稳定安全。
操作人员需要具备必要的技能和经验,避免发生意外事故。
第二篇示例:负载牵引法原理是指通过利用外部的负载来产生牵引力的一种原理。
在物理学中,负载牵引法是一种利用重物拉动轻物的方法,从而实现牵引作用的原理。
这种方法是在古代就已经存在的,但是直到近代才被系统地研究和应用。
详析Doherty功放设计之负载牵引原理(上)
详析Doherty功放设计之负载牵引原理(上)管子是有膝点电压的。
在输出特性曲线(图1-3)中,负载变大后负载线与输出特性曲线最左边的交点会变小,膝点电压左移,这样电压的摆幅就可以变大了(否则,同样输入下会过压)。
信号分布在不大不小均值附近的概率较大,过大和过小的信号发生的概率比较小。
当今世界,通信技术的发展可谓日新月异(准确来说是人类的欲望日新月异。
),然而当前人类所依赖的无线通信完全借由无线电,频段还大都集中在C频段以下,相当拥挤。
那么,为了在有限的频谱资源内增加信息的传输量,信号调制方式就越来越复杂,出现了如64QAM,256QAM等许多非恒包络的调制方式,如此,就导致信号的峰均比不断的变大。
图1-1是信号包络瞬时概率分布与AB类功放瞬时效率曲线的比较图(为啥和AB类比较呢?因为不太久以前基站功放就是这个类型)。
不难看出,信号分布在不大不小均值附近的概率较大,过大和过小的信号发生的概率比较小。
然而从图中亦可发现AB类功放的效率是随着信号功率增加而增加的,因此在均值附近功放的效率很低。
当基站功放采用AB类功放时,常常需要从P-1dB回退6dB左右工作,此时的效率就会由50%降到20%(打个比方,不是确定数据),不要小看哦,如果要求输出额定功率100W,你算算有多少功率发热去了。
因此传统的AB类功放就无法满足现代通信系统对功放效率的要求。
因此需要设计高效率的功放来满足系统对效率的需求。
可能你会说这有何难,用开关类功放啊(比如E类),用谐波控制类功放啊(比如F类),理论效率100%啊。
但是很不幸,这些高效率功放的线性校正好难,直接把做DPD的搞死了(搞算法的要加油哦。
),同时这些高效功放的工作带宽也不太够,可靠性也不好。
好在天无绝人之路,值得庆幸的是,早在1936年,W.H.Doherty先生就发明了Doherty功放架构。
这种架构的功放,在功放回退工作时可以同时具有较高的效率和比较好的线性度。
1牵引系统知识介绍
2、磁生电:旋转磁场切割转子导体感应电动势和电流。
3、电磁力:转子载流(有功分量电流)体在磁场作用下受电磁力作用, 形成电磁转矩,驱动电动机旋转,将电能转化为机械能。
北车电牵研发中心
11ห้องสมุดไป่ตู้
• 电生磁
移动的电荷(电流)产生磁场 磁场强度和电流之间的关系由安培环路定理确定: 设空间有N根载流体,环绕载流体的任意磁通闭合回路中,磁场 强度的切向分量沿该回路的线积分等于该回路所包围的电流的 代数和。
北车电牵研发中心
35
5、齿轮箱 • 齿轮传动装置用于将牵引电机的高速旋转通过齿轮传动到机车转向架轴,带 动车轮旋转,提供车辆走行的动力。 • 齿轮箱装置一端与牵引电机连接,另一端与车轴连接,牵引电机输出的转速 和转矩通过齿轮传动装置,传递到车轴上,用于驱动车辆运行;在电气制动 时,车轴通过齿轮传动装置,将车辆运行能量传递给牵引电机,用于电气制 动。 6、制动电阻箱 • 制动电阻器安装Mc车和M车车顶上,用于电网无法吸收再生电能的情况下 进行电阻制动。制动电阻器具有抗振动、抗冲击,并且具有良好的散热性能 ,采用自然风冷 • 电阻回路被串联至对应的一个PWM IGBT斩波器。
北车电牵研发中心
40
轨道特性 轨距 正线最小竖曲线半径 正线曲线半径 车场线曲线半径 轴重(动车) 轴重(拖车) 最大坡道 1435 mm 1000 m 150m 50 m ≯10.5 t ≯12 t 35‰
北车电牵研发中心
41
供电标准
(1) 车辆采用受电弓供电,供电额定电压为直流750V。 线路走行轨为负极。 (2) 供电电压的变化范围为 500 V至900 V直流电。 (3) 在使用再生功能时,电压不高于1000 V。 (4) 车辆的再生制动能量反馈到电网, 以便为线路上运 行的其他列车提供电能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
负载牵引的基础知识
负载牵引,百度百科的解释是酱紫滴:负载牵引方法可以通过不断调节输入和输出端的阻抗,找到让有源器件输出功率最大的输入、输出匹配阻抗。
同理也可以得到让功率管效率最高的匹配阻抗。
这种方法可以准确地测量出器件在大信号条件下的最优性能,反映出器件输入、输出阻抗随频率和输入功率变化的特性,为器件和电路的设计优化提供了坚实的基础。
图一、负载牵引系统示例
晕?嘿嘿,估计是有点。
来个白话版:由于通信制式越来越复杂,对放大器的线性度和效率要求越来越高。
由于放大器的效率和线性度是个永恒的矛盾(射频君在前面的放大器科普中讲过,没看过的同学可以复习放大器历史文章系列),所以如何平衡这样的矛盾达到系统设计的最优就是一个需要解决的难题。
如何解决?调节输入和输出端的阻抗也就是负载牵引 (Load-Pull)原理來改善增益压缩点,从而降低谐波的非线性失真,模拟功放的最大输出功率负载点,然后?然后传说中的高转换效率、高输出功率,高线性功放目标就在眼前了哈!
那神功究竟是如何炼成的呢?且听我们一步步详解。
RF功放在大信号工作时,最佳负载阻抗会随着输入信号功率的增加而跟着改变,所以我们必须在史密斯圆图上(Smith chart)上,针对不同的输入功率,每给定一个输入功率,画出在不同负载阻抗時的等输出功率曲线(Power contours),从而帮助我们找出最大输出功率时的最佳负载阻抗,这种方法称为负载牵引Load-Pull。
以典型的晶体管设计为例,首先大家会如何来做阻抗匹配?当然是借助传说中的ADS 等仿真工具。
由于晶体管工作在接近饱和区和线性区交界时,它的AC Load Line会随着输入信号的增加而改变,尤其S21参数会随着输入信号的增加而变小,因此转换功率增益会因为晶体管工作在饱和区被压缩(传说中的功率压缩的概念由此得来)。
因此,原来的晶体管在小信号状态下,输入/输出端都是设计在共轭匹配的。
增益最大化的情况下,如果一旦晶体管位于饱和区工作的时候,输出功率的最佳负载阻抗匹配点就会变动,所以晶体管就无法得到最大的功率输出。
我们需要借助仿真软件,以Load-Pull的原理有规则地搜索史密斯图上的每个区域,找出功率放大器最大功率输出时的最佳外部负载阻抗ZL点。
这个模拟系统包括两个部分:分别是负载阻抗调节及阻抗匹配之参数提取:
1)负载阻抗调节:用极坐标表示法有规则地在史密斯图(Smith chart)上的每一点进行模拟,借由模拟不同的外部负载ZL所对应的输出功率结果,就可以得到放大器最大输出功率时负载阻抗在史密斯图上的位置,于是最佳负载发射系数点此ΓL就得到了。
由ΓL的值可得知最佳外部阻抗ZL,並作输出阻抗匹配。
那么具体这个负载阻抗调节系统是如何组成的呢?
a)移相器
其功能在于模拟等Γ原图(Γe- j2θ)上之θ角调整(等同加上一段点长度為θ的传输线),如图二所示:
图二、仿真软件中的移相器
(b)变压器(Transformer):其功能在于模拟最佳负载阻抗点所对应Γ圆大小,必须搭配
一个Parameter sweep模拟器來做n值的控制变化。
2)阻抗匹配之参数提取:如图三所示,位于功率器件的输出端和负载阻抗调节器中间,当负载阻抗调节器做任意改变时,可由此提取器读S-Parameter之值,并求得负载輸入端的
反射系数。
图三、阻抗匹配的参数匹配器
仿真出来以后,还是理论值怎么办?这个时候我们强大的Loading Pulling 系统(当然核心是我们的阻抗调节器Tuner)就要出场了。
Load-Pull测试系统是验证功率放大器阻抗匹配最精准且最完整的测试平台,结构图如下图四所示。
此测量平台包括:调节器Tuner System、信号SG、功率计Power Metter、矢网VNA、Bias System偏置系统等而组成,几乎兼具基础所有参数的测试功能,如DC-IV 曲线、S-Parameter、Power、Noise、IMD、ACPR等。
图四、Load-Pull SNP 系统示意图
我们就可以根据改变偏置电压以及调整Tuner对应的匹配阻抗,观察输出功率及效率的变化。
上图中的电缆、连接器、阻抗调节器等组件,在系统测量前都必须将他们的S参数测出来,输入测量系统的软件中,从而修正误差。
图五:DUT端口S-Parameter校准(即将系统校准面延伸到DUT端口)
图六、功率校准
上面图六中可以看出来,整个系统的插入损耗基本是0.7dB左右(考虑进电缆、连接
器的影响,这个插入损耗是接近实际情况的)。
测量时通常先将输入端的Tuner固定在某一阻抗(通常為50?附近),然后变动输出端的Tuner 的位置以得到最大输出功率的輸出端负载阻抗,这个步骤称为Load-Pull Measurement;再將输出端Tuner固定在此阻抗位置去变动输入端Tuner以得到最大的功率
增益及更高的輸出功率,这个步骤称为Source-Pull Measurement,重复 Load-Pull Measurement及Source-Pull Measurement的步骤,來回不停地重复调整,找出最佳输入与输出阻抗的位置;所以Load-Pull测量最重要的目的便是找出最佳负载阻抗(Optimum load impedance)使功率元件或电路在最低的輸入功率下有最高的功率輸出。
通过Tuner的調整,我們可以很清楚的从软件看到在Smith Chart上的等功率曲线(Power Contour)。
下面的图七、八为测量的Source-Pull Power Contour及Load-Pull Power Contour。
图七、Source-pull Power Contour
图八、Load-pull Power Contour
上面两图就可以看出来我们的最佳阻抗点了。
接着还可以进一步做 Power sweep、Bias sweep vs Power 等测试,如图九、图十所示:
图九、Power sweep
图十、Bias sweep vs Power
这些附属测试值,也可以用来更好地帮助我们来做放大器的设计。
关于Tuner,射频君多说两句,国内基本上常见的品牌是Maury和Focus,类型也有可编程和手动可调型,具体选择就要看应用和预算了。
怎么样,负载牵引的基本知识就介绍到这里,亲们更清楚了吗?如果觉得有用表忘了点赞和转发哈!。