实时动态(RTK)测量中坐标转换参数计算几种方法
RTK求解参数(三参、四参、七参)讲解复习过程
站参数,使基准站发射差分信号。 • 3、连接移动站,设置移动站,使得移动站接收到基准站的差分数据,并达到
窄带固定解。 • 4、移动站到测区已知点上测量出窄带固定解状态下的已知点原始坐标。 • 5、根据已知点的原始坐标和当地坐标求解出两个坐标系之间的转换参数。 • 6、打开坐标转换参数,则RTK测出的原始坐标会自动转换成当地坐标。 • 7、到另外你至少一个已知点检查所得到的当地坐标是否正确。 • 8、在当地坐标系下进行测量,放样等操作,得到当地坐标系下的坐标数据。 • 9、将坐标数据在手簿中进行坐标格式转换,得到想要的坐标数据格式。 • 10、将数据经过ActiveSync软件传输到电脑中,进行后续成图操作。
• 平面坐标转换
– 多应用于 – 北京54,国家80 – 与当地自定义 – 坐标系之间的转换
– 四个参数 – X0平移 – Y0平移 – θ 坐标轴旋转 – K 尺度
不同(椭球)坐标系的转换流程
空间直角坐标(X,Y,Z)
椭球转换
大地坐标(B,L,H) 投影反算 平面直角坐标(x,y,h) 平面转换 当地平面坐标(x,y)
• 参数计算是RTK作业中很重要的一个环节,下面就RTK在使用不同的 转换方法时的作业步骤做详细说明。
一:平面四参数+高程拟合(用户常用方法)
• 1、架设基准站 • 基准站可架设在已知点或未知点上(注:如果需要使用求解好的转换
参数,则基准站位置最好和上次位置要一致,打开上次新建好的项目, 在设置基准站,只需要修改基准站的天线高,确定基准站发射差分信 号,则移动站可直接进行工作,不用重新求解转换参数) • 基准站架设点必须满足以下要求: • a、高度角在15度以上开阔,无大型遮挡物; • b、无电磁波干扰(200米内没有微波站、雷达站、手机信号站等, 50米内无高压线); • c、在用电台作业时,位置比较高,基准站到移动站之间最好无大型 遮挡物,否则差分传播距离迅速缩短; • d、至少两个已知坐标点 (已知点可以是任意坐标系下的坐标,最好 为三个或三个以上,可以检校已知点的正确性); • e、不管基站架设在未知点上还是已知点上,坐标系统也不管是国家 坐标还是地方施工坐标,此方法都适用。
浅谈在工程测量中RTK测量坐标转换参数的选择

浅谈在工程测量中RTK测量坐标转换参数的选择作者:孙健来源:《城市建设理论研究》2013年第06期摘要:阐述实时动态GPS测量的原理,论述了实时动态GPS测量特点及参数选择,以便我们在实时动态GPS测量时,能够正确使用坐标转换参数。
关键词: GPS;实时动态GPS测量;转换参数中图分类号:O551文献标识码: A 文章编号:0引言实时动态GPS测量技术(RTK),是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中三维定位成果,并达到厘米级精度,加上轻便、灵活、精度高、全球性、全天候、实时性和高效性等特点,在工程测量中得到了广泛应用。
RTK测量不但缩短了外业作业时间,提高了工作效率,而且由于流动站可以直接掌握定位成果质量,避免测后返工问题。
本文阐述了RTK定位系统在高速公路测量中的应用。
1实时GPS测量原理;实时GPS测量以载波相位观测值为基础,需要在两台GPS接收机之间增加一套无线数字通讯系统(亦称数据链),将两相对独立的GPS信号接收系统联成有机的整体。
基准站通过电台将观测信息和观测数据传输给流动站,流动站将基准站传来的载波观测信号与流动站本身的载波信号进行差分处理,解出两站间的基线值,同时输入相应的坐标转换和投影参数,实时得到测点坐标。
因此,实时GPS测量的关键除数据传输技术外,还需具有很强的数据处理能力。
实时GPS系统由以下3部分组成:(1)GPS信号接收系统。
(2)数据实时传输系统。
(3)数据实时处理系统。
2、实时GPS测量的特点(1)实时GPS测量保留了所有经典GPS功能。
动态测量数据后处理的方式,是高精度控制测量中的理想方法。
(2)实时GPS测量因具备实时性,放样精度可达到厘米级。
(3)实时GPS测量定位速度快。
如在未知点的初始化,约需1分钟;如在已知点上进行初始化,仅有几秒钟足够。
(4)实时GPS测量成果是在野外观测时实时提供,因此能在现场及时进行检核,避免外业工作返工。
RTK求解参数(三参、四参、七参)讲解

1、架设基准站、设置好GPS主机工作模式 2、打开手簿软件、连接基准站、新建项目、设置坐标系统参数、设置好基准 站参数,使基准站发射差分信号。 3、连接移动站,设置移动站,使得移动站接收到基准站的差分数据,并达到 窄带固定解。 4、移动站到测区已知点上测量出窄带固定解状态下的已知点原始坐标。 5、根据已知点的原始坐标和当地坐标求解出两个坐标系之间的转换参数。 6、打开坐标转换参数,则RTK测出的原始坐标会自动转换成当地坐标。 7、到另外你至少一个已知点检查所得到的当地坐标是否正确。 8、在当地坐标系下进行测量,放样等操作,得到当地坐标系下的坐标数据。 9、将坐标数据在手簿中进行坐标格式转换,得到想要的坐标数据格式。 10、将数据经过ActiveSync软件传输到电脑中,进行后续成图操作。
空间直角坐标(X,Y,Z)
大地坐标(B,L,H) 投影正算 平面直角坐标(x,y,h) 平面转换 当地平面坐标(x,y)
RTK简易操作流程
• 以下只是软件的简易操作流程,详细使用步骤请参照接下来的详细说明。此 流程只是我们提供给的一种解决方案,在熟练使用本软件后,可以不依照此 步骤操作。在作业过程中,通常的使用方法为:
• 投影讲解 三参数
三、七参数转换
一:平面四参数+高程拟合(用户常用方法)
• 1、架设基准站 • 基准站可架设在已知点或未知点上(注:如果需要使用求解好的转换 参数,则基准站位置最好和上次位置要一致,打开上次新建好的项目, 在设置基准站,只需要修改基准站的天线高,确定基准站发射差分信 号,则移动站可直接进行工作,不用重新求解转换参数) • 基准站架设点必须满足以下要求: • a、高度角在15度以上开阔,无大型遮挡物; • b、无电磁波干扰(200米内没有微波站、雷达站、手机信号站等, 50米内无高压线); • c、在用电台作业时,位置比较高,基准站到移动站之间最好无大型 遮挡物,否则差分传播距离迅速缩短; • d、至少两个已知坐标点 (已知点可以是任意坐标系下的坐标,最好 为三个或三个以上,可以检校已知点的正确性); • e、不管基站架设在未知点上还是已知点上,坐标系统也不管是国家 坐标还是地方施工坐标,此方法都适用。
2.RTK求解参数(三参、四参、七参)
一:平面四参数+高程拟合(用户常用方法)
• 1、架设基准站 • 基准站可架设在已知点或未知点上(注:如果需要使用求解好的转换 参数,则基准站位置最好和上次位置要一致,打开上次新建好的项目, 在设置基准站,只需要修改基准站的天线高,确定基准站发射差分信 号,则移动站可直接进行工作,不用重新求解转换参数) • 基准站架设点必须满足以下要求: • a、高度角在15度以上开阔,无大型遮挡物; • b、无电磁波干扰(200米内没有微波站、雷达站、手机信号站等, 50米内无高压线); • c、在用电台作业时,位置比较高,基准站到移动站之间最好无大型 遮挡物,否则差分传播距离迅速缩短; • d、至少两个已知坐标点 (已知点可以是任意坐标系下的坐标,最好 为三个或三个以上,可以检校已知点的正确性); • e、不管基站架设在未知点上还是已知点上,坐标系统也不管是国家 坐标还是地方施工坐标,此方法都适用。
• 2、假设已建好一个项目,参数计算完以后, 正常工作了一段时间,由于客观原因,第 二次作业不想把基准站架设在和第一次同 样的位置,此时,可以用到点校正功能, 只需要将基准站任意架设,打开第一次使 用的项目,到一个已知点上校正坐标即可。 校正方法和第一种情况相同。
• 一般的:
• • • • 三参数:要求已知一个国家坐标点,精度随传输距离增加而减少 四参数:要求两个任意坐标点,精度在小范围内可靠 七参数:三个国家坐标点,精度高,对已知点要求严格 一步法:三个任意坐标点,在残差不大的情况下,精度可靠
五、校正参数
• 用于计算两坐标系统之间的平面、高程平移参数。通常 在以下两种情况,可以使用校正参数
– – – –
– – – – –
多应用于 北京54,国家80 与当地自定义 坐标系之间的转换
RTK物探测量放样坐标转换参数求取方法的探讨

张建 恩 , 刘亚 宁 , 李康 虎 , 传 杰 .R K 物 探 测 量 放样 坐 标 转 换 参 数 求取 方 法 的 探 讨 . 探 装 备 ,0 0 2 ( ) 6 贾 T 物 2 1 , 0 4 :2 4
~
2 68
本 文从 坐 标 转 换 参 数 的 计 算模 型 、 G 一 8 w s 4坐 标 的 获 取 、 已知 地 方 坐 标 系 坐标 的 检 验 、 换 参 数 的 计 算 等 几 转
ee s fr s i cs r e y u .EGP, 0 0, 0 4 :2 4~ 2 8 tr o es u v y l o t mi a 2 1 2 () 6 6 Th s a t l ic s e h a c l t n me h d o r n f r to a a t r r m GS 8 o r i a e o t el c l i r i e d s u s st e c lu a i t o fta s o ma i n p r me e sf o W c o - 4 c o d n t st h a o
的坐标 系 和投 影方式 也各 不相 同 , 需要 将 GP S测 量 得 到的基于 WGS 4坐标系 下 的成果 转 换 成各 个 一8 国家大 地坐标 系下 的独立成 果 。由于东方 地球物 理
W GS 8 是 参 心 坐 标 系 , 不 同 的 国家 和 地 区采 用 一 4 在
标 转化 方法和 转换 参数 的求 取工 作 , 为我 们顺 利 成 开展地震 勘探 工作必 须首要解 决 的问题 。本 文将从 以下几个 方面探 讨物探 测量施 工 中坐 标转换参 数 的 求取 方法 和一些 应注意 的问题 。
f rt e k o o a o r i a e s s e a d t h w h e tme h d t h o et e p o e r n f r t n p r me e s o h n wn lc lc o dn t y t m n o s o t e b s t o o c o s h r p rt a so ma i a a t r o
GPS-RTK测量求取坐标转换参数的探讨
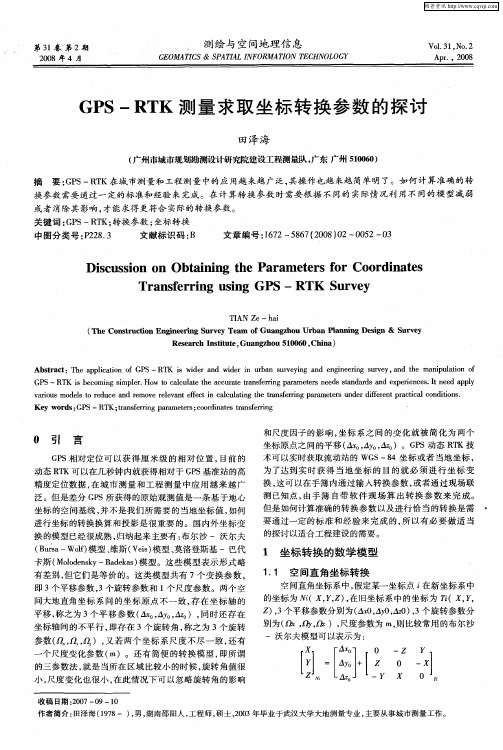
Dic s i n o t i i g t e Pa a e e s f r Co r i a e s u so n Ob a n n h r m t r o o d n t s
Tr n f r i i g GPS —RTK u v y a se rng usn — S r e
0 引 言
G S相 对定 位 可 以 获 得 厘 米 级 的 相 对 位 置 , P 目前 的 动态 R K可 以在几 秒钟 内就 获得 相对 于 G S基 准站 的高 T P
和尺度 因子 的 影 响 , 标 系之 间 的变化 就被 简 化 为 两个 坐 坐标 原点 之 间 的平移 ( 。△ , )。G S动态 R K技 , P T 术 可 以实时获 取流 动站 的 WG 8 S一 4坐标 或 者 当地 坐 标 , 为 了达 到 实 时 获 得 当地 坐 标 的 目的 就 必 须 进 行 坐 标 变 换 , 可 以在 手簿 内通过 输 入转 换参 数 , 者通 过现 场联 这 或 测 已知 点 , 由手 簿 自带 软 件 现 场 算 出 转 换 参 数 来 完 成 。 但 是如何 计算 准确 的转 换 参 数 以及 进行 恰 当的转 换 是需 要 通过一 定 的标 准 和经 验 来 完 成 的, 以有 必 要 做 适 当 所 的探 讨 以适合 工程建 设 的需要 。
R sac ntue Gu n z o 10 0 C ia ee rhI stt, a gh u5 06 , hn ) i
Ab t a t h p l ain o S—RT s w d r a d wie n u b n s r e i g a d e gn e n u v y a d t e ma i u ain o s r c :T e a p i t f GP c o K i i e n d r i r a u v y n n n ie r g s r e , n h np lt f i o GP S—R K sb c mi g smp e . w a c lt h c u a eta se r g p r mee s n e s sa d r sa d e p r n e . tn e p l T i e o n i lr Ho t c lu a e t e a c r t r n fri a a tr e d t n a d n x e e c s I e d a py o n i V rO S mo es t e u e a d r mo e r lv n f c n c lu a ig t e t n f r n a a tr n e i e e tp a t a o dt n . a U d l or d c n e v ee a tef ti ac lt h r ser g p mee s u d rdf r n r c il c n i o s i e n a i r c i Ke r s G S—RT t n fri g p a t r ; o r ia e rn f ri g y wo d : P K; a sern a me e c o d n t sta se r r r s n
如何进行参数计算(四参数高程拟合)?

如何进行参数计算(四参数高程拟合)?定义:四参数是指两个平面坐标系之间的平移(DX、DY),旋转(α),缩放参数(κ)。
四参数是RTK常用的一种坐标转换模式,通过四参数完成WGS84平面到当地平面的转换,通过高程拟合完成WGS84椭球高到当地水准的拟合。
要求:至少两个任意同一坐标系的坐标(通用方法)使用环境:适用于大部分的普通工程测量,工程放样简要步骤1)仪器工作模式设置2)采集控制点坐标3)求解参数4)坐标检核计算参数的详尽流程1、设置基站与移动站(可以选择手机卡或者电台模式),使移动台最终达到固定解;2、采集控制点坐标(如“交186”与“y265”为控制点)在碎部测量中,分别对控制点进行“交186”和“y265”采集坐标(使用平滑采集对控制点进行采集),分别保存为“交186”与“y265”。
3、求解参数1)进入参数求解界面2)、添加控制点对如图操作,分别添加“交186”与“y265”两个点对。
其中源点为刚才采集的坐标,目标点为控制点的已知坐标(需要自己手动添加,或者提前输到控制点库中,再调用)。
3)计算参数点击计算,得到“四参数+高程拟合”的结果点击应用后,即可完成操作。
A为高程固定差改正的差值。
注意:尺度的数据为0.999……或者1.000……4、进行坐标检核找一个控制点进行碎部测量(最好找第三个控制点),对比采集的(N,E,Z)与已知坐标(N,E,Z)检核坐标的正确性。
注意:1、这里的“四参数+高程拟合”计算是针对于基站而言的。
在计算“四参数+高程拟合”之前,必须保证坐标系统中的基准面的“转换模型”,平面转换的“转换模型”,高程拟合“转换模型”均为“无”;2、一个项目只能求解一次参数计算,或者说一个项目求参数前,必须满足前一点条件;3、计算参数的两个点数据必须是接收同一个基站信号采集的固定解坐标;用于计算参数的两个点的已知坐标必须是同一个坐标系统,即计算的尺度(k)为0.999……或者1.000……。
GPS动态RTK测量中WGS-84与本地坐标系转换程序的实现及应用

个公共点的坐标值, 对 (1) 式进行重新组织并写成 观测方程的形式: %$( / %$) 0 ,# $ [!! !" !# "! "" "# * ] , 其中 # / [ %$ &$ ’$ ] %$( / (,
[ %$ &$ ’$ ] %$) / ),
(3)
[ 45 .$ %$) ] , ,$ / 45 为三阶单位矩阵, & ’$ .$ / . &$ . ’$ & %$ &$ . %$ & )
. 引言
!"# 相对定位可以获得厘米级的相对位置, 目前的动态 $%& 可以在几秒钟内就获得相对于 !"# 基准站的高精度定位数据。但是差分 !"# 所 获得的原始观测值是两点之间相对位置, 即一条 基于地心坐标的空间基线, 而不是实际工程中所 需要的当地的坐标值, 如何进行坐标的换算和投 影在这里是很重要。 国内外坐标变换的模型已经很成熟, 归纳起 来主要有: 布尔莎 ( 沃尔夫模型、 莫洛登斯基 ( 巴
678 / 678 0 % ( ( 0 1) & / ( ( 0 1) 678 / 89: 0 3 ’ [( (1 . 2 )0 1 ] 89: / 上式中 ( 为该点卯酉圈曲率半径: ( /
($)
3 (#) 3 3 !1 . 2 89: / 其中 3 为椭球体的长半径, 2 为椭球体第一 偏心 率。对 于 -’) . %$ 椭 球 体 其 参 数 为: 3 / ;5<%15<&=, 2 3 / &>&&;;?$5<???&15
勘
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实时动态(RTK)测量中坐标转换参数计算的几种方法摘要:rtk所接收到的数据是wgs-84坐标系下的数据,而我们使用的坐标系一般是1954北京坐标系、1980年国家大地坐标系以及一些城市工矿使用的独立坐标,因此,需要将rtk接收到的wgs-84坐标转换成我们工程所使用的坐标系坐标。
为此,如何计算这些坐标系统转换参数成为rtk使用过程中的一个非常重要的环节。
关键词:gps-rtk测量坐标转换
1、rtk技术概述
实时动态(rtk)测量系统,是gps测量技术与数据传输技术的结合,是gps测量技术中的一个新突破。
gps测量中,静态、快速静态、动态测量都需要事后进行解算处理才能获得待测点的坐标,而rtk测量实时差分定位是一种能够在野外实时得到厘米级精度的测点坐标。
rtk实时测量技术具有全天候、作业效率高、定位精度高、操作简便等优点,因而得到了广泛的应用,而且技术设备越来越先进与方便。
rtk测量系统一般由以下三部分组成:gps接收设备、数据传输设备、软件系统。
数据传输系统由基准站的发射电台与流动站的接收电台组成,它是实现实时动态测量的关键设备。
2、rtk实时测量坐标参数转换
rtk所接收到的数据是wgs-84坐标系下的数据,而我们一般使用的坐标系是1954北京坐标系、1980年国家大地坐标系以及一些城市工矿使用的独立坐标,因此,需要将rtk接收到的wgs-84坐
标转换成我们使用的1954北京坐标系坐标或1980年国家大地坐标系坐标或城市工矿使用的独立坐标系坐标。
为此,如何计算坐标系统转换参数成为rtk使用过程中的很重要的一个环节。
根据rtk的原理,参考站和流动站直接采集的都为wgs84坐标,参考站一般以一个wgs84坐标作为起始值来发射,实时地计算点位误差并由电台发射出去,流动站同步接收wgs84坐标并通过电台来接收参考站的数据,条件满足后就可达到固定解,流动站就可实时得到高精度的相对于参考站的wgs84三维坐标,这样就保证了参考站与流动站之间的测量精度。
如果要符合到已有的已知点上,需要把原坐标系统和现有坐标系统之间的转换参数求出。
3、三参数转换
设任意点在o1和o2为原点的两坐标系中坐标分别为x1i,y1i,z1i和x2i,y2i,z2i,则三参数转换模型为
三参数公式表明两个空间直角坐标系尺度一致,且各坐标轴相互平行。
从以上可以看出,三参数转换只需一个已知坐标点,这种方法已知点可以是国家坐标系下的坐标或坐标系和wgs-84坐标系之间的旋转很小。
此方法都适用于客户对坐标精度要求不是很高的情况,随着移动站离基准站距离的增加,精度越来越低,根据在实际工作中的应用,仅适用于1km左右的测量范围。
4、四参数转换
平面四参数坐标转换方法是一种降维的坐标转换方法,是由三维空间的坐标转换转化为二维平面的坐标转换,避免了由于已知点
高程系统不一致而引起的误差。
即四参数是一种平面直角坐标系的转换模型。
设任意点在o1和o2为原点的两坐标系中坐标分别为x1i,y1i 和x2i,y2i,则四参数转换模型为
公式中,,为平移参数,m为尺度因子,为旋转量。
从上述模型可以看出,四参数是一种平面直角坐标系的转换模型,需要两个国家坐标系已知点坐标或地方坐标系已知点坐标。
如果地面两点的距离小于10km,由于我们几乎可以忽略因采用不同椭球参数对转换精度的影响,所以,可采用四参数来完成两种坐标系的转换。
采用四参数,对于简单的地形测量没有必要进行高程拟合,即使你用了高程拟合参数也很难达到四等水准测量的精度,即使采用高程拟合参数后,rtk的高程测量的精度也没人能够打包票。
rtk
是通过测量直接获得的大地高减去高程异常值,来求解正常高的,而采用数学拟合法获得的高程异常值不一定精确,加之不同地方的高程异常值有差异。
所以,小范围测区没有必要使用高程拟合参数。
四参数中的缩放比例m为一非常接近1的数字,越接近1越可靠,一般为0.999x或1.000x平面中误差。
由两个已知点(x,y,z)计算可以得出最大平面残差和最大高程残差,如果超过要求的精度限定值,说明测量点的原始坐标或当地坐标不准确,残差大的控制点,不能参与解算,这对测量结果的精度有决定性的影响。
5、七参数转换
七参数是一种空间直角坐标系的转换模型,当前国内实施两种三维坐标系统转换的模型主要有的有布尔莎—沃尔夫(bursa—wolf)和莫洛琴斯基—巴代卡斯(molodensky—badekas)和范士(veis)模型。
这三种模型的公式,它们间的七个参数相差较大,但各自构成完整的数学模型,参数间存在明确的解析关系,可以相互进行转换,分别用它们来换算点的坐标时,其结果是完全相同的,因此,这三种模型是等价的。
我国的地心坐标变换参数地心二号系七个变换参数,即采用的是布尔莎公式。
设任意点在o1和o2为原点的两坐标系中坐标分别为x1i,y1i,z1i和x2i,y2i,z2i,则三参数转换模型为
公式中,,,为平移参数;,,为旋转参数;为尺度变化参数。
在上述公式中,当;====0,即为三参数公式。
同理,略去上述公式中的某些参数,可以分别得四参数、五参数或六参数等坐标变换公式。
五参数在手持gps中会用到,这里由于篇幅所限,不做详细叙述。
坐标转换参数的求解质量与求解坐标转换参数所使用的已知控制点(通常称为基准点)的精度、公共点的多少、几何图形结构有关。
因此,选定的基准点要求精度要高,并且均匀分布在测区周围。
鉴于地面网可能存在有一定的系统误差,且在不同区域并非完全一样,所以采用分区变换参数,分区进行坐标变换,可以提高坐标变换精度。
一般地,在求解坐标转换参数时,采取不同基准点的匹配方案,用不同的计算方法求得坐标转换参数,经过比较选择残差较
小、精度较高的一组参数使用。
七参数是一种空间直角坐标系的转换模型,至少三个已知坐标点,已知点可以是国家坐标系下的坐标或和wgs-84坐标系之间存在很小旋转坐标系下的坐标,最好三个以上已知点,可以检验已知点的正确性。
此方法解算模型严谨,因此要求已知点的坐标精度高,一般在大范围作业时使用,当已知点精度不高时,不推荐使用七参数。
七参数坐标转换参数的求解方法,一般是rtk作业前首先在测区做一定数量的静态gps控制点,与国家坐标系的控制点联测,经过gps数据处理软件后处理,就可以同时得到gps点的wgs-84坐标系统坐标和国家坐标系统的坐标,这样就可以进行七参数求解。
现在,我们再来讨论一下转换严密性的问题。
在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换时不严密的。
举个例子,在wgs-84坐标和北京54坐标两个椭球基准不同,在wgs-84和北京54坐标之间是不存在一套转换参数可全国通用,因此坐标转换参数具有区域性,它仅适用于已知点所覆盖的区域,其外推精度明显低于内插精度。
因此,在一个测区求解的坐标转换参数不能直接应用到其他测区。
6、结语
综上所述,三参数要求已知一个国家坐标点,精度随传输距离增加而减少;四参数要求两个任意坐标点,精度在小范围内可靠;七参数要求三个国家坐标点,精度高,对已知点要求严格。
我们应根据各个工程的实际情况和具体要求,为提高野外作业效率和测设
坐标的精度,选择适合本工程的坐标转换参数计算方法。
主要参考文献
[1] 孔详元、梅是义.控制测量学.武汉测绘科技大学出版社.
[2] 胡奎、黎曦、胡伍生、杨小青.gps-rtk测量结果的精度分析.现代测绘.
[3] 林国技、覃赵行.手持gps坐标系统转换参数的求解方法.
[4] 徐绍铨、张华海、杨志强、王泽民.gps测量原理及应用.武汉测绘科技大学出版社.。