列车运行控制速度曲线
列车运行控制系统的特性
列车运行控制系统的特性1.列控信息列控信息是指列控地面设备之间、列控地面设备与地面外部设备之间、列控车载设备之间、列控车载设备与列车外部设备之间、列控地面设备与列控车载设备之间传输的信息。
列控信息是列车运行控制系统的神经中枢,是列车运行控制系统正常工作的基础。
通常,列控信息主要指列控地面设备与列控车载设备之间传输的信息。
列控信息分为安全信息和非安全信息。
直接与行车安全相关的信息属于安全信息,如行车许可、空闲闭塞分区数量、进路信息、临时限速、等级切换、列车位置和速度等;非安全信息是列控辅助信息,如列车编组、列车长度、始发/目的站、司机乘务组编号等。
列控信息的信息量和实时性应满足不同速度、不同密度、不同运输方式及不同列车控制方式的要求。
列控信息的信息量首先应满足列车安全追踪间隔的距离要求。
(1)列控信息的信息量。
(2)列控信息的实时性。
2.列车追踪间隔距离和间隔时间同一方向上的两趟列车,彼此以闭塞分区相间隔追踪运行,前一列车的尾部与后一列车的头部之间所保持的最小间隔时间,称作追踪间隔时间。
计算追踪间隔时间时应分别计算区间列车追踪间隔时间、车站同方向发车追踪间隔时间及车站同方向到达的追踪间隔时间。
比较这三种追踪间隔时间,取其中最大的数值,作为追踪间隔时间。
既有线三显示和四显示信号系统中,列车控制采用分级阶梯码方式,而高速铁路则采用速度目标距离模式曲线方式(一次模式曲线)。
因此,既有线的列车追踪间隔时间计算公式不适用于高速铁路。
高速铁路列车追踪间隔时间的计算包括以下几部分:(1)区间列车追踪间隔时间。
(2)车站同方向到达追踪间隔时间。
(3)车站同方向发车追踪间隔时间。
3.RAMS(1)系统安全性。
(2)可靠性和有效性。
①平均无故障时间(mean time between failure,MTBF)。
②平均无故障运行时间(mean time between services failure,MTBSF)。
列车运行控制速度曲线
列车运行控制速度曲线
Lt
D
实验一:绘制列车限制速度曲线
实验报告
一.实验目标
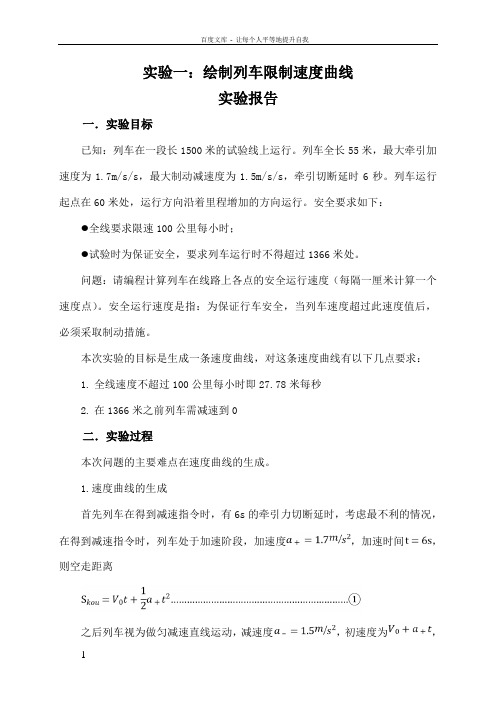
:列车在一段长1500米的试验线上运行。列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。列车运行起点在60米处,运行方向沿着里程增加的方向运行。安全要求如下:
全线.实验过程
本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成
首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度a= 1.7 m⁄s2,加速时间t = 6s,
那末空走距离
1
Skou=V0t2at2… … … … … … … … … … … … … … … … … … … … … … ①
试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在路线上各点的安全运行速度〔每隔一厘米计算一个速度点〕。安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:
1.全线速度不超过100公里每小时即27.78米每秒
06第六章列车运行控制系统

第六章 列车运行控制系统
滞后速度控制方式又称为入口速度控制方式, 也称为出口端速度检查方式。给出列车的入口速 度值,监控列车在本闭塞分区不超过给定的入口 速度值,采取人控优先的方法,控制列车不超过 下一闭塞分区入口速度值。法国TVM-300列控系 统采用人控优先的方法,进行滞后速度控制。必 须要增加一个闭塞分区作为安全防护区段,俗称 双红灯防护。如图所示,细虚线为列车实际减速 运行线,从最高速至零速的列车实际减速运行线 为分段曲线组成的一条不连贯曲线组。粗虚线为 撞墙后的紧急制动曲线。
五、列控系统功能 1、基本功能 (1)列控系统的车载信号是列车运行的凭证; (2)按列车安全制动距离,自动调整列车运 行追踪间隔; (3)防止列车运行速度超过线路允许速度、 道岔侧向规定速度及列车构造速度,保证行车 安全;
第六章ቤተ መጻሕፍቲ ባይዱ列车运行控制系统
(4)防止列车冒进关闭的禁止信号机; (5)监督列车以低于30km/h的速度进行出入 库作业; (6)与机车自身速度控制系统结合,实现对 列车的减速、缓解、加速的自动控制; (7)与列车调度系统结合,实现对列车的简 单自动驾驶; (8)测速定位功能;
ETCS设备的列车可以在没装备ETCS地面 设备的线路上运行。
第六章 列车运行控制系统
(2)ETCS 应用等级STM 也是ETCS的兼容功能,装备了ETCS
设备的列车可以在装备本国信号系统地 面设备的线路上运行。车载设备需增加 STM模块。 (3)ETCS 1级
欧洲点式应答器 欧洲点式应答器+欧洲环线 轨道电路检查列车占用和完整性;
2、CTCS应用等级 (1)CTCS应用等级0(简称L0) 通用机车信号+列车运行监控装置, 为现有系统; (2)CTCS应用等级1(简称L1) 主体机车信号+安全型运行监控装置, 可实现点连式超速防护;
中国轨道交通列车运行控制技术及应用

中国轨道交通列车运行控制技术及应用宁滨;刘朝英【摘要】中国的轨道交通在近十年中获得了飞速发展,城市轨道交通有效解决了市内交通供需矛盾,高速铁路的发展则给城市间的交通带来了同城效应和零换乘的理念.但无论如何,轨道交通的安全运营是其发展的重中之重.列车运行控制系统是确保轨道交通安全的关键技术之一,在我国得到了快速地自主创新发展.本文详细介绍了中国铁路列车运行控制系统(CTCS)技术和城市轨道交通基于通信的列车运行控制系统(CBTC)技术.为实现综合轨道交通网络的互联互通,轨道交通的低碳节能运营、自动化和智能化运营,实现资源共享的网络化运营模式,轨道交通列车运行控制系统将向着系统化、网络化、智能化、通信信号一体化和标准化、开放化的方向发展,通过降低系统复杂性、缩短列车追踪间隔、提高系统防护水平等技术降低成本,提高运能和旅客满意度,保证轨道交通的安全性和可靠性,最终实现安全、高效、绿色出行.%With the rapid development of rail transit system in China in recent ten years , the problem of heavy traffic in cities has been solved effectively . The development of high-speed railway in China has resulted in none-transfer between the cities and changed the traditional concepts of time and space . However , safe opera-tion is the most important for the development of rail transit . The train control system ,as one of the key tech-nologies to ensure the safety of the rail transit , has beenunder rapid development in China through independent innovation . The train operation control system used in China railway (CTCS) and the communication-based train control system used in China urban rail transit (CBTC) were described in this paper . In order to satisfy the requirementsof connectivity for integrated rail transit network , low carbon energy efficient , automated and intelligent operation of rail transit system , and the network operation mode based on resource sharing , the train operation control system of the rail transit will developtowards systematization ,information networking , intelligence ,communication & signal integration , standardization andopenness . The reduction of the com-plexity of the system , the shortening of the train tracking interval , and the improvement of system protection level will lead to the reduction of the cost and carbon footprint and the improvement of transport capacity and passenger satisfaction ,which will ensure the safety and reliability of rail transit ,and ultimatelyachieve safe , efficient and green travel .【期刊名称】《铁道学报》【年(卷),期】2017(039)002【总页数】9页(P1-9)【关键词】高速铁路;城市轨道交通;列车运行控制系统【作者】宁滨;刘朝英【作者单位】北京交通大学,北京 100044;中国铁路总公司,北京 100844【正文语种】中文【中图分类】U284中国的轨道交通在近十年中获得了飞速发展,城市地铁、轻轨等轨道交通系统有效解决了市内交通供需矛盾,高铁成网、同城效应、高铁零换乘理念等给旅客出行带来了极大方便,拉近了城市间的距离,加快推进了城乡一体化发展,提升了中国的现代化水平。
列车运行控制有答案解析
三、主观题(共12道小题)10.列车运行控制系统,按照车地信息传输方式,分为()、()和()三类;按照速度控制方式,分为()和()两类。
参考答案:连续式列控系统;点式列控系统;点一连式列车运行控制系统;阶梯控制方式;目标—距离模式曲线控制方式。
11.简述列车运行控制系统的各种分类方式。
参考答案:(1)按照地车信息传输方式分类:连续式列控系统、点式列控系统、点一连式列车运行控制系统。
(2)控制模式分,分为两种类型:阶梯控制方式(包括出口速度检查方式、入口速度检查方式)和速度—距离模式曲线控制方式。
(3)按照人机关系来分类,分为两种类型:设备优先控制的方式、司机优先控制方式。
(4)按照闭塞方式:固定闭塞、移动闭塞。
(5)按照功能、人机分工和自动化程度:ATS(列车自动停车)、ATP(列车超速防护)、ATC(又称列车自动减速系统)、ATO(又称列车自动驾驶系统)。
12.轨道电路一般由()、()、()和()四部分组成。
参考答案:送电端受电端钢轨线路钢轨绝缘。
13.查询-应答器,按其信息来源分类,可以分为()和()两种。
参考答案:有源无源14.简述轨道电路的工作原理。
参考答案:列车未进入轨道电路,即线路空闲时,电流流过轨道继电器线圈,使继电器保持在吸起状态,接通信号机的绿灯电路,允许列车进入轨道电路。
当列车进入轨道电路区段内,即线路被占用时,电流同时流过机车车辆轮对和轨道继电器线圈。
由于轮对电阻比轨道继电器线圈电阻小的多,送向两根钢轨间的电压降低。
为此流经轨道电路继电器线圈的电流减小到继电器的落下值,使轨道继电器释放衔铁,用继电器的后接点接通信号机的红灯电路,向后续列车发出停车信号,以保证列车在该轨道电路区段内运行的安全。
15.简述查询应答器的工作原理。
参考答案:查询-应答器工作原理较简单,它是靠两者之间通过短距离无线电波传递信息来完成功能。
对于无源查询-应答器,则由于应答器平时无能源,它要靠查询器来传递给它足够能源,以便后者有能力发送数据的无线电波。
列车运行控制实验报告
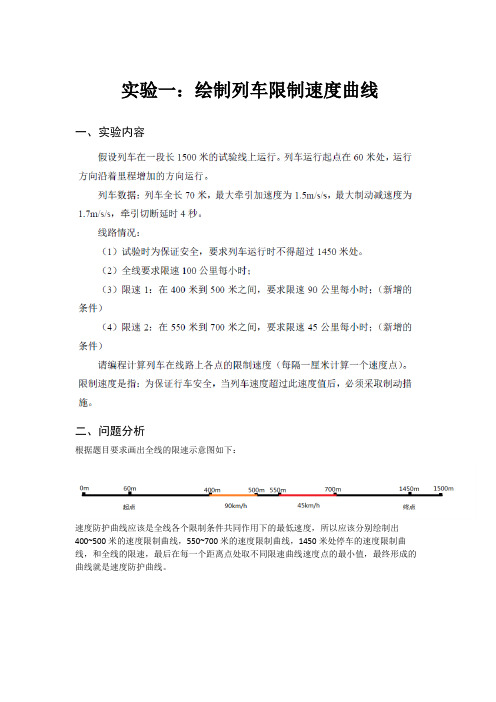
实验一:绘制列车限制速度曲线一、实验内容二、问题分析根据题目要求画出全线的限速示意图如下:速度防护曲线应该是全线各个限制条件共同作用下的最低速度,所以应该分别绘制出400~500米的速度限制曲线,550~700米的速度限制曲线,1450米处停车的速度限制曲线,和全线的限速,最后在每一个距离点处取不同限速曲线速度点的最小值,最终形成的曲线就是速度防护曲线。
首先设计1450m处停车的速度限制曲线,列车在制动过程中,近似做初速度为当前速度,末速度为0的匀减速直线运动,减速度为1.7m/s/s,根据牛顿运动学公式:但是,当车载设备输出制动命令时列牵引切断和力真正达到100% 需要一定时间,称为制动延。
因此,车载设备开始触发制动需经过两个阶段。
第一阶段为空走阶段,列车制动力为0,做持续时间是牵引切断延时的匀速直线运动;第二阶段才为完全制动阶段。
所以实际的目标距离会更短,考虑制动延时后目标距离减少了4*Vm,在保证安全的前提下,Vm取全线限速的最大值,即100km/h。
所以:400m处和550m处的速度限制曲线也用同样的表达式绘制,只需要改变目标距离x和Vt的值。
经过上述分析,得到速度限制曲线的Matlab表达式如下:400米处:v3=(sqrt(2*a*(400-s-s1)+vt_1^2)*3.6) .*(s<=400-s1)550米处:v4=(sqrt(2*a*(550-s-s1)+vt_2^2)*3.6) .*(s<=550-s1)1450米处:v1=sqrt(2*a*(1450-s-s1)+vt^2)*3.6;当列车从低速限速区段驶入高速限速区段时,要保证车尾通过低速限速区段才能解除限速,所以低限速区间的长度应该延长车长70m,Matlab表达式如下:400~500限制速度:90.*(s>400-s1 & s<=500+l)550~700限制速速:45.*(s>550-s1 & s<=700+l)全线限制速度:v2=100.*(s>=60 & s<=1450);使用分段函数绘制出各个限制条件下的速度-距离曲线,再用函数v=min([v1,v2,v3,v4]),得到每个距离点s上对应的最小速度点v。
铁路信号运营基础 第四章列车运行控制 知识点总结
第四章列车运行控制第一节机车信号一.机车信号的由来及作用1.恶劣的地形条件及自然环境(曲线、山区、林区、隧道、多雾、雨雪)2.列车高速度、高密度运行机车信号的作用:机车信号是一种能够自动复式列车运行前方地面信号机显示的机车车载系统。
二.机车信号的显示1.三显示自动闭塞区段的连续式机车信号机(1) 一个绿色灯光:准许列车按规定速度运行,表示列车接近的地面信号机显示绿色灯光(2) 一个黄色灯光:要求列车注意运行,表示列车接近的地面信号机显示一个黄色灯光(3) 一个双半黄色灯光:准许列车经道岔侧向位置,限速越过接近的地面信号机,表示列车接近的地面信号机显示两个黄色灯光(4) 一个半黄半红色灯光:要求及时采取停车措施,表示列车接近的地面信号机显示红色灯光(5)一个红色灯光:表示列车已越过地面上显示红色灯光的信号机(6)一个白色灯光:不复示地面上的信号显示,机车乘务人员应按地面信号机的显示运行。
无显示时,表示机车信号机在停止工作状态2.四显示自动闭塞区段连续式机车信号机(1) 一个绿色灯光:准许列车按规定速度运行,表示列车接近的地面信号机显示绿色灯光(2) 一个半绿半黄色灯光——准许列车按规定速度运行,要求注意,表示列车接近的地面信号机显示一个绿色灯光和一个黄色灯光(3) 一个黄色灯光:要求列车减速运行,表示列车应按规定的限速值越过接近的显示一个黄色灯光的地面信号机(4) 一个带“2”字的黄色灯光:要求列车减速运行,表示列车应按规定的限速值越过接近的显示一个黄色灯光的地面信号机,并预告次一架信号机开放经道岔侧向位置的信号显示(5) 一个双半黄色灯光:准许列车经道岔侧向位置,限速越过接近的地面信号机,表示列车接近的地面信号机显示两个黄色灯光(6) 一个半黄半红色灯光:要求及时采取停车措施,表示列车接近的地面信号机显示红色灯光(7) 一个红色灯光:表示列车已越过地面上显示红色灯光的信号机(8) 一个白色灯光:不复示地面上的信号显示,机车乘务人员应按地面信号机的显示运行。
列车运行控制速度曲线
实验一:绘制列车限制速度曲线实验报告一.实验目标已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为1.7m/s/s,最大制动减速度为1.5m/s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:●全线要求限速100公里每小时;●试验时为保证安全,要求列车运行时不得超过1366米处。
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:1.全线速度不超过100公里每小时即27.78米每秒2.在1366米之前列车需减速到0二.实验过程本次问题的主要难点在速度曲线的生成。
1.速度曲线的生成首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度,加速时间,则空走距离之后列车视为做匀减速直线运动,减速度,初速度为,末速度为0,则刹车距离根据要求,有其中是列车距防护点的距离,取最不利情况即带入数据,根据①②③可得其防护速度与当前列车距防护点距离的关系式为当时,2.程序的编写使用matlab进行编程,算法流程如下图:限速计算函数:function [ v ] = xiansu( sz,s,vt )v=-19.2+0.5*sqrt(691.2+12*(sz-s)); if v> vtv= vt;endif v<=0v=0;endend其中sz为防护点位置,s为当前列车位置,vt为列车限速,v为防护速度。
主函数V=zeros(1,150001); %设置速度数组S=0:0.01:1500; %设置距离数组Vt=100/3.6; %设置最高限速Sz=1366; %设置防护点距离for k=1:150000 %计算防护速度V(k)=xiansu(Sz,S(k),Vt);endVa=V*3.6; %速度转换为km/hSa=S/1000; %距离转换为kmplot(Sa,Va) %画图grid onxlabel('位置(km)')ylabel('速度(km/h)')title('列车速度防护曲线')axis([0 1.5 0 120])V=V*100; %速度转换为cm/sS=S*100; %距离转换为cmT = [S;V];fileID = fopen('列车防护速度.txt','wt');fprintf(fileID,'%.2f,%.2f\n',T);fclose(fileID);三.实验结果分析利用matlab画出的图像如下图所示:该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一:绘制列车限制速度曲线
实验报告
一.实验目标
已知:列车在一段长1500米的试验线上运行。
列车全长55米,最大牵引加速度为s/s,最大制动减速度为s/s,牵引切断延时6秒。
列车运行起点在60米处,运行方向沿着里程增加的方向运行。
安全要求如下:
全线要求限速100公里每小时;
试验时为保证安全,要求列车运行时不得超过1366米处。
\
问题:请编程计算列车在线路上各点的安全运行速度(每隔一厘米计算一个
速度点)。
安全运行速度是指:为保证行车安全,当列车速度超过此速度值后,
必须采取制动措施。
本次实验的目标是生成一条速度曲线,对这条速度曲线有以下几点要求:
1. 全线速度不超过100公里每小时即米每秒
2. 在1366米之前列车需减速到0
二.实验过程
本次问题的主要难点在速度曲线的生成。
1. 速度曲线的生成
首先列车在得到减速指令时,有6s的牵引力切断延时,考虑最不利的情况,在得到减速指令时,列车处于加速阶段,加速度S =匕7呵",加速时间|2血,则空走距离
S/iou = V^t + 2^ +12................................................................ ①
之后列车视为做匀减速直线运动,减速度= IM/",初速度为人+ " + r,
末速度为0,则刹车距离
S shu=^^-.............................................. ②
根据要求,有
其中s是列车距防护点的距离,取最不利情况即\
^5 沖廿[1 $/才1] hr" ****・" bl・*******・* ****** *・*■ "**9**1 ・・***・**1*・ »*****・・* 1・****1**・・1 /带入数据,根据①②③可得其防护速度与当前列车距防护点距离S的关系式为-38.4 + ^'691.2 + 125 \
=-------------- 为---------------- \当V Q> 27.78时V n= 27.78
2. 程序的编写
使用matlab进行编程,算法流程如下图:
限速计算函数:
fun cti on [ v ] = xia nsu( sz,s,vt ) v=+*sqrt+12*(sz-s));
if v> vt
v= vt;
end
if v<=0
v=0;
end
end
v为防护速度。
其中SZ为防护点位置,s为当前列车位置,vt为列车限速,
主函数
V二zeros(1,150001); % 设置速度数组
S=0::1500; % 设置距离数组
Vt=100/; % 设置最高限速
Sz=1366;%设置防护点距离
for k=1:150000%计算防护速度
V(k)=xia nsu(S z,S(k),Vt);
end
Va=V*; %速度转换为km/h
Sa=S/1000;%距离转换为km
plot(Sa,Va)%画图
grid on
xlabel('位置(km) ')
ylabel('速度(km/h)')
title(' 列车速度防护曲线')
axis([0 0 120])
V=V*100;%速度转换为cm/s
S=S*100;%距离转换为cm
T = [S;V];
filelD = fope n('列车防护速度.txt','wt');
fprin tf(filelD,'%.2f,%.2f\n',T);
fclose(filelD);
三.实验结果分析
利用matlab画出的图像如下图所示:
该图像在1366m之前速度就减为0,这是因为考虑在最不利情况下,速度为0时突然加速而产生的余量,此图像各种情况均视为最不利的情况,对列车的安全能够保证。