激光光束质量M~2因子测量系统的设计
《激光原理》3.7激光光束质量的品质因子
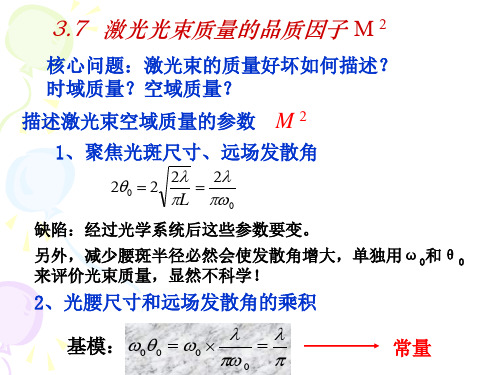
核心问题:激光束的质量好坏如何描述? 时域质量?空域质量?
描述激光束空域质量的参数 M 2
1、聚焦光斑尺寸、远场发散角
20 2
2 2
L 0
缺陷:经过光学系统后这些参数要变。
另外,减少腰斑半径必然会使发散角增大,单独用ω0和θ0 来评价光束质量,显然不科学!
2、光腰尺寸和远场发散角的乘积
基模: 0 0
0
0
常量
高阶厄米 -高斯光束:
mm
2m 10
2m
1 0
2m
1
2
高阶拉盖尔-高斯光束:
mnmn
m 2n 10
mLeabharlann 2n10m 2n 1 2
3、激光光束品质因子 M 2—国际上公认
0 0
基模: M 2 1
高阶厄米高斯光束:
M
2 x
2m 1
M y2 2n 1
高阶拉盖尔-高斯光束: M r 2 m 2n 1
M 2的物理意义:基模高斯光束的M 2最小,光腰半 径和发散角最小,达到衍射极限。高阶高斯光束以 及其他非理想光束的M 2则很大,偏离衍射极限大。
激光光束质量参数测量的实验研究讲解

第24卷第6期2000年12月激光技术LASERTECHNOLOGYVol.24,No.6December,2000激光光束质量参数测量的实验研究赵长明(北京理工大学光电工程系,北京,100081)摘要:采用CCD系统实验测量了LD泵浦Nd∶YAG激光器的光束质量参数,研究了CCD系统的背景噪声特性和积分区域选取对光束质量参数测量的影响,从实验数据中得到以下结论:(1)在有、无背景光两种条件下,背景记数强烈地依赖于曝光时间和像素的合并,温度影响可以忽略不计;(2)为获得M2合理的测量结果,至少要选择5%积分区域。
关键词:M2因子CCD摄像机光束质量InvestigationontheexperimentalmeasurementoflaserbeamqualityZhaoChangming(Dept.ofOpticalEngineering,BeijingInstituteofTechnology,Beijing,100081) Abstract:ThebeamqualityofaLDpumpedNd∶YAGlaserismeasuredwithCCDcamerasyst em. ThebackgroundcharacteristicsoftheCCDsystemandtheinfluenceofthesizeofintegralboxup onmeasurementresultsareinvestigated.Thefollowingconclusionscanbederivedformexperi mentalresults:(1)Backgroundisstronglydependuponexposuretimeandpixelbinning,whilet emperaturehasanignorableeffectuponit,whetherwithorwithoutambientlight.(2)A5%2cuti stheminimumvalueinordertogetareasonableresult.Keywords:M2factor CCDcamera beamquality引言激光光束质量参数,即M2因子的测量是近几年研究的一个热点。
激光光束质量评价方法与光束特性参数测量系统的开题报告

激光光束质量评价方法与光束特性参数测量系统的开题报告导言:激光技术已经广泛地应用于工业制造、医疗保健、通讯、军事防卫等领域。
与传统光源相比,激光光源具有单色、相干性好、聚焦度高、光思速度快等优点。
激光的传输过程中,光束质量是影响激光传输质量的重要因素,其能否达到要求直接影响到激光在实际应用中的效果。
本次开题报告旨在介绍激光光束质量评价方法及其测量系统的设计方案,以期提高激光光束传输效率与质量。
一、研究背景随着激光技术在日常生活以及工业制造等领域中的应用范围的不断扩大,对激光光束质量的要求也越来越高。
激光光束质量可以表征光束的聚焦度、稳定性、相干性、功率分布等多项关键参数,其能否达到要求对于激光应用效果十分重要。
目前,激光光束质量评价方法主要有薄板探针法、相干法、扫描法等。
其中,薄板探针法是比较传统的方法,通过调节薄板位置来测量光斑的大小及位置,再通过FFT算法计算光束的M²值。
相干法则是通过干涉仪的原理,将光束分为两路,通过相干波面比幅值来评价光束质量。
而扫描法则是通过精密的扫描器扫描激光光束,利用采集系统采集扫描后的光强分布数据,计算出光束的各项参数。
二、研究内容本次研究的主要内容包括:1、研究激光光束质量评价的薄板探针法、相干法、扫描法的原理与优缺点。
2、设计一种基于扫描法的激光光束特性测量系统,包括扫描器、采集器、计算机等组成部分。
3、通过实验检验激光光束特性测量系统的精度与灵敏度,并对激光光束的聚焦度、稳定性、相干性、功率分布等参数进行评价。
三、研究意义通过本次研究,可以为提高激光传输质量,进一步推广和发展激光技术提供有力的科学支撑。
首先,本次研究将介绍激光光束质量评价方法的优缺点,能够为各种应用场景提供选择合适的评价方法。
其次,通过设计基于扫描法的激光光束特性测量系统,能够为激光应用领域的遥感、医疗、制造等提供更准确的光束特性参数,并优化激光系统的设计方案。
最后,通过对激光光束特性测量系统的实验检验,建立完整的激光光束质量评价方法,能够提高激光技术的应用质量与效率,为相关领域的应用提供新的思路和方法,推进激光技术的发展。
实验报告——激光束光学特性的实验测量

实验报告一、实验题目:激光束光学特性的实验测量 二、实验内容及部分原理:测量激光束质量因子M2、光束束腰大小w0、位置z0和光束远场发散角 高斯光束在自由空间的传播满足方程(1)()1202202=-Zz wz w(1)方程(1)中, λπ2020w Z=称为瑞利尺寸或共焦参数。
沿光轴方向,任一位置z 处的光斑半径可由公式(2)描述()()2020202z z ww z w -⎪⎪⎭⎫⎝⎛+=πλ (2)其中,w 0是光束的束腰半径,λ 为光波长,z 0 是束腰的位置。
激光束质量因子M 2作为评价参量, 其定义为远场发散角理想高斯光束腰束宽度远场发散角实际光束束腰宽度⨯⨯=2M(3)具体表示为 λθπ02W M=(4)其中,W 0是实际光束的束腰半径,θ 是其远场发散角。
因此,对于实际激光束,其光斑方程可以写为 ()()20204202z z WM W z W-⎪⎪⎭⎫⎝⎛+=πλ (5)公式(4)和(5)可以取x 和y 方向分量表达形式。
λθπλθπyy yxx xW MW M002002,==(6)()()20204202x x x xx z z WM W z W -⎪⎪⎭⎫⎝⎛+=πλ (7)()()20204202yy y yy z z WM W z W -⎪⎪⎭⎫⎝⎛+=πλ (8)因此,依据公式(4)或(6),M 2的测量归结为光束束腰半径W 0和远场发散角θ 的测量确定。
为了在测量中确定光束的有效宽度W ,目前多采用光功率分布的二阶矩测量法。
()()()()z z W z z W yy xx σσ2,2== (9)其中,()()z z y xσσ和称为光功率函数的二阶矩,定义为()()()()⎰⎰⎰⎰⋅-=dxdyy x I dxdyy x I x x z g x,,22σ(10)()()()()⎰⎰⎰⎰⋅-=dxdy y x I dxdyy x I y y z gy,,22σ(11)由于实际测量是逐点进行的,因此,公式(10)和(11)可变换为离散形式()()()[]()∑∑⋅-=ii i ii i gixy x I y x I x xz ,,22σ(12)()()()[]()∑∑⋅-=jj jjj j gjyy xI y x I y yz ,,22σ(13)其中,y g 是光束横截面的重心。
光束质量M2因子测试及分析实验报告

实验名称:光束质量M2因子测试及分析实验目的1、了解M2因子的概念及M2因子评价光束质量的优越性;2、掌握M2因子的测量原理及测量方法;3、掌握测量激光器的腰斑大小和位置的方法。
实验原理1988年,A.E. Siegman利用无量纲的量——光束质量因子,较科学合理地描述了激光束质量,并由国际标准组织ISO采纳。
光束质量因子又被称为激光束质量因子或衍射极限因子,其定义为实际光束的束腰宽度和远场发散角的乘积理想光束的束腰宽度和远场发散角的乘积M2因子定义式中同时考虑了束宽和远场发散角的变化对激光光束质量的影响。
在二阶矩定义下,利用与量子力学中不确定关系类似的数学证明过程可得 M2≥1,它说明小的束宽和小的发散角二者不可兼得。
当M2=1时,激光束为基模高斯光束;当M2>1时,激光束为多模高斯光束。
当激光光斑为圆斑时,光束质量因子M2可表示为式中为光束束腰宽,为光束的远场发散角,A 为激光波长。
根据国际标准组织提供的ISOlll46—1的测量要求设计测试方案。
采用多点法测量光束质量因子,就是在激光束的传输方向上测量多个位置处的激光参数。
利用曲线拟合的方法求得各激光参数。
CCD 通过数据采集卡连接到计算机,二阶矩定义的光束宽度通过编程确定,在计算机上可以读到束宽的大小。
对测量结果采用多点双曲线拟法拟M2 = ━━━━━━━━━━━━━━━━合或抛物线拟合,求出按二阶矩定义束宽的传输方程中3个系数a i、b i;、c i后,就可以计算出相应的光束参数对于束腰不可直接测量的激光柬(绝大多数激光器产生的激光都是发散的),先要用无像差透镜进行束腰变换。
实验测量两台会聚光束He-Ne激光器(一台是基模的,一台是多模的)M2因子和其腰斑的大小与位置、发散角及瑞利长度。
根据透镜对高斯光束的变化规律,可以根据以下公式算出和Z0。
从而求出激光器腰斑的大小和位置。
实验数据记录及处理①基模激光的拟合图像原始实验数据Waist Width X 0.538 mm Waist Width Y 0.583 mm Divergence X 3.374 mrad Divergence Y 3.304 mrad Waist Location X 232.03 mm Waist Location Y 233.64 mm M2 X 2.2532 M2 Y 2.3898 Rayleigh Range X 159.47 mm Rayleigh Range Y 176.33 mm Wavelength 632.8 nm Focal Length 100 mm Laser Location 507 mm Z-Position X Width Y Widthmm mm mm 106.55 0.2303 0.21891116.55 0.21483 0.22191126.55 0.25671 0.27044136.55 0.30434 0.31553146.55 0.29206 0.30925156.55 0.32241 0.34863166.55 0.36897 0.40218176.55 0.4072 0.44172186.55 0.48755 0.5182196.55 0.54782 0.56461206.55 0.63207 0.68761216.55 0.69338 0.73035226.55 0.7324 0.76752236.55 0.81272 0.85872296.55 1.3694 1.4259346.55 1.7949 1.858拟合的X轴方向双曲线为,拟合得到的腰斑位置为116mm,大小为0.292mm;拟合的Y轴方向双曲线为,拟合得到的腰斑位置为112mm,大小为0.278mm;由以上数据,编写程序计算后可得:X轴方向的激光器腰斑大小和位置为Y轴方向的激光器腰斑大小和位置为②多模激光的拟合图像实验结论实验测得的激光器基模光束X轴方向质量因子M x2的值为2.2532,腰斑位置z0x的值为376.033mm,腰斑大小dσ0x的值为0.168972mm;Y 轴方向质量因子M y2的值为2.3898, 腰斑位置z0y的值为398.756mm,腰斑大小dσ0y的值为0.191698mm.激光器多模光束质量因子M x2的值为2.0554,M y2的值为2.1228.。
m2激光模式的测量实验报告

m2激光模式的测量实验报告篇一:M2激光模式测量激光模式(M2)的测量一、实验的目的和意义如何评价一个激光器所产生的激光光束空域质量是一个重要问题。
人们根据不同的应用需要将聚焦光斑尺寸、远场发散角等列为衡量激光光束空域质量的参数。
但由于当激光通过光学系统后,光束的光腰尺寸和发散角均可改变,减小腰斑直径必然使发散角增加。
因此单独用其中之一来评价激光光束空域质量是不科学的。
人们发现:经过理想的无像差的光学系统后“束腰束宽和远场发散角的乘积不变”,而且可以同时描述光束的近场和远场特性。
目前国际上普遍将“光束衍射倍率因子M”作为衡量激光光束空域质量的参量。
它的一般定义为:M22?实际光束的腰斑半径与远场发散角的乘积基模高斯光束的腰斑半径与远场发散角的乘积(1)激光光束传输质量因子M2是一种全新的描述激光光束质量的参数。
本实验介绍了M2的物理概念、物理意义、特点及测量方法。
并对下面三个方面进行了解。
1 2 3了解M的定义;了解M2实验原理;了解M的测试过程;22二、实验原理(一)、M2的物理意义图1如图1所示,对于基模的高斯光束我们可知?0??2?? (2)式中?0是基模光束束腰半径,θ是基模光束的远场发散角。
W0??M?0?W0?2?2根据定义式(1)可知对于实际光束有M2,即2W0????4?(3)式中W0代表实际光束的束腰半径,Θ代表实际光束的远场发散角[3]。
下面我们根据“束腰的束宽和远场发散角的乘积不变原理”对M进行推导。
2图2无像差透镜对束腰和发散角的变换d0??d0??const’’(4)式(4)可由量子力学的测不准原理来解释:在束腰处光子的位置不确定度是?X,?X最小值是单模高斯光束束腰束宽d0;光子的横向不确定度是?Px?h?Px,在近轴近似条件下h??sin???(5)式中h为普朗克常数,?最小值是单模高斯光束远场发散角???4?d0(6)4?X??P?根据测不准关系:对一般光束束腰处有:?X?D0?h(7)?Px?h?D0??? 代入Eq有4?? (8)2M?D0?d0???4?定义光束质量因子M为:2D0??1(9)又因为实际光束的截面常常不是圆形的,即光束的光强分布不是对称的或存在像散时,光束质量应用两个参数来描述:?M????M??2x???4?D0x?xD0y?y2y?4?4?M2x、M2y是分别表示X方向和Y方向的光束质量因子。
激光光束质量评价
激光光束参数—束腰
束腰:
束腰是光束宽度取最小值的位置,束腰也是能量最集中的地方。
激光光束参数—发散角
光束发散角θ
激光束在腰部最细,随着离腰部距离的逐渐增大,光束的有效截面逐渐变粗,也 就是激光束具有一定的发散性质,发散程度用发散角θ表示。对于某些激光器, 其远 场可能距激光器很远,直接测量远场发散角十分不方便。根据拉格朗日不变式,可采 用聚焦光束测量法,即在透镜的像方焦点处,测得光束直径为Df ,则光束发散角θ表示 为: θ = Df/ f 对于非对称的激光光束,应求出x , y 方向上相应的发散角θx ,θy
相干性是所有波 的共性,但由于 各种光波的品质 不同,导致它们 的相干性也有高 低之分。普通光 是自发辐射光, 不会产生干涉现 象。激光不同于 普通光源,它是 受激辐射光,具 有极强的相干性 所以称为相干光
激光高斯光束的特性
激光作为一种光源,其光束截面内的光强分布 是不均匀的,即光束波面上的测量原理
实际光束的腰斑半径 远场发散角 M d0 f 理想高斯光束的腰斑半径 远场发散角 4
2
M 2 因子越大,则光束质量越 ▪ 可知:在近轴条件下, M 2 1 。 差。 ▪ d0 为实际光束束腰宽度, f 为光束远场发散角。 ▪ 由上式可知,对激光束质量因子 M 2 的测量,归结为光束束 腰宽度 d0 和光束远场发散角 f 的测量。
3
•
在工程光学和傅里叶光学上,已知传播过程中任意一 个位置的光强和相位分布,用惠更斯菲涅尔衍射理论 可以计算出任意位置的光强分布。
光束近场和远场计算
近场衍射
或称菲涅尔衍射。是指在光源和障碍物间距离为有限远 的情况下发生的衍射。
远场衍射
在工程光学中,认为远场即光源和观察幕与障碍物 (孔或屏)之间的距离均为无穷远。此时为菲涅尔衍射的 特例,可以直接通过夫琅禾费衍射计算出远场的光强分布。
实验报告——激光模式 的测量

实验报告——激光模式2M 的测量实验时间:2017.03.02 晚上一、实验目的激光光束传输质量因子2M 是一种全新的描述激光光束质量的参数。
本实验介绍了M 2的物理概念、物理意义、特点及测量方法。
并对下面三个方面进行了解。
1)了解2M 的定义; 2)了解2M 实验原理; 3)了解2M 的测试过程; 二、实验原理 (一)、2M 的定义目前国际上普遍将“光束衍射倍率因子2M ”作为衡量激光光束空域质量的参量。
它的一般定义为:2M =实际光束的束腰半径与远场发散角的乘积基模高斯光束的束腰半径与远场发散角的乘积(1)(二)、2M 的物理意义如图1所示,对于基模的高斯光束02λωθπ=(2)式中0ω是基模光束束腰半径,θ是基模光束的远场发散角。
根据定义式(1)可知对于实际光束有200W M ωθΘ=,即200224W M W πλλπΘ==Θ(3) 式中0W 代表实际光束的束腰半径,Θ代表实际光束的远场发散角。
图2无像差透镜对束腰和发散角的变换下面我们根据“束腰的束宽和远场发散角的乘积不变原理”对2M 进行推导。
0d d const θθ''==(4) 式(4)可由量子力学的测不准原理来解释:在束腰处光子的位置不确定度是X ∆,X ∆最小值是单模高斯光束束腰束宽0d ;光子的横向不确定度是x P ∆,在近轴近似条件下sin x hh P λλΘ∆=Θ=(5)式中h 为普朗克常数,Θ最小值是单模高斯光束远场发散角θ4dπλθ=(6)根据测不准关系:4X P h π∆∙∆≥(7)对一般光束束腰处有:0X D ∆=x h P λΘ∆=代入方程(7)有04D λπΘ≥(8)定义光束质量因子2M 为:200014D M D d πθλΘ==Θ≥(9) 又因为实际光束的截面常常不是圆形的,即光束的光强分布不是对称的或存在像散时,光束质量应用两个参数来描述:202044x x xyy y M D M D πλπλ⎧=Θ⎪⎪⎨⎪=Θ⎪⎩(10) 2xM 、2y M 是分别表示X 方向和Y 方向的光束质量因子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
因子测 量 系统构 成
1 1 硬 件 构 成 .
激光光束质量 因子测 量系统 硬件 主要 由光学 部分 、 机械 部分和 电学 部分 这三 大部 分组成 。系统硬 件结 构如图 1 所示 。
激 光 光束 质量 测量 系 统
ma o ftelsrsos t lpep st n eetdb sn r yc ag o ped vc C D) n ec nri n g tnes yo i i r no e pt t l oio si dtce yuigar hrec u l e ie( C ,adt e t dadl h tn i f f h a a mu i i s a h o i i t d-
0 引言
随着激光技术 的不断发 展及 高科技激 光产 品 ( 如 激光加工机 、 激光治 疗仪 等 ) 的不 断 出现 , 如何 选择一 种简便 、 精确 、 实用 的方法 评价激 光光 束质 量 , 而科 从 学地评价激光产 品质量 已成为全世界科学界研究 的热
门课 题 j 。
1
±6 , % 测量 时 间小 于 3mi 。 n
关键 词 :曲图像 采集
中图分类 号 :T 4 H7
文献 标志 码 :A
Ab t a t: I r e o raiea tmai a u e n fb a q aiye te y ls r h a u n y tm fls rb a q ai a trM i sr c n od rt e lz uo t me s rme to e m u lt mitd b a e ,t e me s r g s se o ae e m u t fco c i l y s
te r t al n a c r a c t 肘。fco 。f al he2D/ D it buin o ih n e i ndprc s igr s l ae ds ly d o h o te m— h oei l i c o d n ewih c y a tr i l t n y 3 dsr t fl titnst a o e sn e u t r ipa e n te h s o i o g y p tr T e rs l o x e me tidc tsta h y tm a uo tc ly me s r h ae e m u l yfr4 0 ~ 1 0 m o tn o sls r ue . h e ut fe p r i n n iae h tt es se c n a tmaial a u et els rb a q ai o 0 t 0 n c ni u u ae , 1 te me s rn c u a yi p t ±6% 。 n h a u n i sls h n3 mi h a u g a c r c su o i a d t e me s r g t i me i e sta n. Ke wo d y r s: Cu v t n Muhpon a l g Ce tod Me s rnga c rc I g c iiin r ef t g i i i i ts mpi n nri au i c ua y ma e a qusto
frn a l g p sto r ac ltd i e i te h a a tr ,s c sb a was dh a d dv re c n l e e ts mpi o i nsae c uae n ra t I h n tep r mees u h a e m itwi t n ie g n ea ge,ec.,ae c c ltd n i l l me t r a uae l
pooe rp s d.I hss se ,h b d se p n tri ee t da cu trfrdee mii l pes mpi gp st n .I ddt n,tei g n r n ti y tm y r tp i gmoo ss lce sa tao tr nngmut l a ln o io s n a io i o i i i h ma eif ’ o
互 彩 霞
( 长春理 工 大 学电子信 息 工程 学院 , 吉林 长春 10 2 ) 302
摘
要 :为 了实现对 激 光器发 射激 光光 束 质量 的 自动化 测量 , 出 了一种 激 光光 束 质量 M2 提 因子 测 量 系统 。该 系统 选 择 混合 式 步 进
电机 作为执 行 机构 来确 定多 个采样 位 置 ; 同时 系统 采用 面阵 电荷耦 合 器 件 ( C ) C D 多点 探 测激 光 光 斑 的 图像 信 息 , 时计 算不 同采 样 实 位 置激光 光斑 的质 心和 光强 , 根据 因子 理论 计算 出激光 光 束 的束腰 宽 度 和束 散 角 等参 数 , 并 最后 由上 位机 显示 激 光 光斑 的二 维/ 三 维光强 分 布及 处 理结 果 。实 验结 果 表 明 , 系统 能 够对 40~110a 0 0 m连 续激 光 器发 射 激 光光 束 质量 进 行 自动 化测 量 , 量精 度 达 测
激 光 光 束 质 量
因 子 测 量 系统 的 设 计 王彩 霞
激 光 光 束 质 量 因子 测 量 系统 的设 计
De i ft e M e s r m en se f rL s rBe m ai M F cor sgn o h a ue tSy t m o a e a Qu ly t at