车道识别与交通标志识别
交通标志 识别技巧
交通标志识别技巧:
第一种:警告类交通标志,警告型标志底色为黄色字为黑色,该类型标志通常设置在有潜在安全风险的道路前放合适位置。
在驾驶车辆过程中看到黄色底黑色字的标志牌是应该提高警惕谨慎驾驶;
第二种:指示类交通标志牌,指示类交通标识通常蓝色为底膜白色为字膜。
常见于市区道路,主要指示车辆行驶以及车道指引等;在道路行驶时遇到指示类交通标志牌应注意识别其内容了解行驶方向;
第三种:禁止类交通标识牌;白色为底膜或者字膜,红色圆圈,黑色白色文字内容;驾驶车辆遇到该类型交通标识牌需要注意提示内容,注意限制/禁止内容以免违法交规;
第四种:道路变化标识牌;如道路变窄标志牌前方右侧绕行以及前方施工等类型交通标识牌,在遇到该类型交通标志牌的时候需要提前减速注意前方路况变化;
第五种:限制标志;该表示一般设置在禁止提车路段或者限速等路段,遇到该标识应该遵守标识提示内容不要超速违规停车等;。
怎样快速辨别交通标志
步骤/方法1:路面上的交通标志重点要关注黄色的禁止标线和导向箭头。
路面上交通标志是最容易让人忽略的,原因是很多驾驶员习惯于将视线投向前方和侧面。
2:解决的办法就是将视线变得立体化,视线放远,对于黄色的禁止标线由于色彩的缘故,通常容易被发现。
需要注意的是,双黄线不能跨线超车,黄虚线可以视机跨线超车,而黄虚线和黄实线并行的情况是黄虚线一侧可以跨线超车。
而对于白色的导向箭头就容易被忽视了,为了及时发现导向箭头,驾驶员行驶在路口前500 m左右时需要减速,观察路口上方有没有导向指示牌,同时观察前方路面上的相应导向箭头,就比较容易识别了。
3:路上方交通标志与路面交通标志结合观察需要注意的是,并不是所有的转向箭头都是按照习惯性的方位布置,有的右转向箭头就布置在最内侧车道,而有的调头箭头布置在最右侧车道,这就需要及时结合路面上方的交通标志进行识别。
4:路上方的交通标志识别路上方的交通标志一般会布置在桥梁和横跨路面的横梁上,在高速公路上和邻近交叉路口时多见,多用于指路和车道指示。
因此行车至路口前一定要注意观察前方视野上方的这些标志,按照指示驶入应该行驶的车道。
而高速公路上方的标志很多是高速驾驶员前方将要到达的地名,并指明目前的距离和在哪个出口驶出,要根据这些指示着重留意目的地的出口信息。
还有一些是指明每条车道的限速标准,比如最内侧车道通常限速120 km/h,中间车道限速100 km/h,最外侧车道限速80 km/h,驾驶员要按规定行驶。
5:路上方交通标志对于路口上方的交通标志,一般新手很容易忽略,因为目光大都集中在前方车辆上,而无暇旁顾。
解决的`方法是将目光放远,发散,不要集中于一点。
在交通事故中造成受害者受伤的,如果伤势经相关机构鉴定不构成残疾者应该就伤后就医产生的医疗费、误工费、护理费、交通费、住宿费、住院伙食补助费以及必要的营养费向肇事方索赔。
交通事故步骤/方法1:医疗费医疗费的索赔主要根据医疗机构出具的医药费、住院费等收款凭证确定。
道路交通标志和标线(超详细图解)
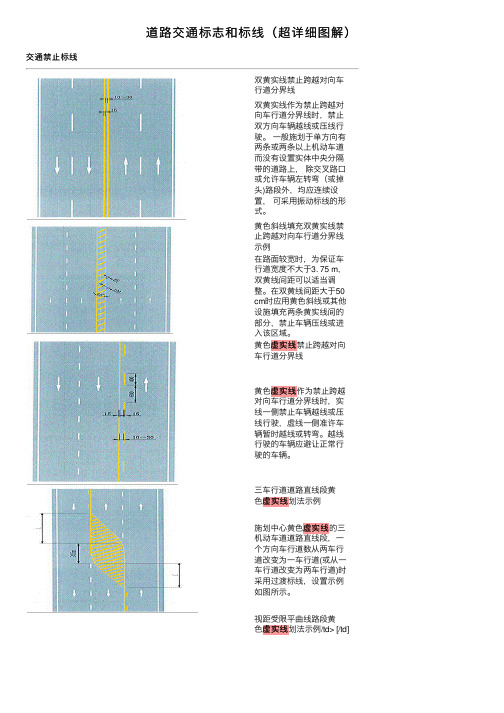
道路交通标志和标线(超详细图解)交通禁⽌标线双黄实线禁⽌跨越对向车⾏道分界线双黄实线作为禁⽌跨越对向车⾏道分界线时,禁⽌双⽅向车辆越线或压线⾏驶。
⼀般施划于单⽅向有两条或两条以上机动车道⽽没有设置实体中央分隔带的道路上,除交叉路⼝或允许车辆左转弯(或掉头)路段外,均应连续设置,可采⽤振动标线的形式。
黄⾊斜线填充双黄实线禁⽌跨越对向车⾏道分界线⽰例在路⾯较宽时,为保证车⾏道宽度不⼤于3. 75 m,双黄线间距可以适当调整。
在双黄线间距⼤于50cm时应⽤黄⾊斜线或其他设施填充两条黄实线间的部分,禁⽌车辆压线或进⼊该区域。
虚实线禁⽌跨越对向黄⾊虚实线车⾏道分界线虚实线作为禁⽌跨越黄⾊虚实线对向车⾏道分界线时,实线⼀侧禁⽌车辆越线或压线⾏驶,虚线⼀侧准许车辆暂时越线或转弯。
越线⾏驶的车辆应避让正常⾏驶的车辆。
三车⾏道道路直线段黄⾊虚实线虚实线划法⽰例虚实线的三施划中⼼黄⾊虚实线机动车道道路直线段,⼀个⽅向车⾏道数从两车⾏道改变为⼀车⾏道(或从⼀车⾏道改变为两车⾏道)时采⽤过渡标线,设置⽰例如图所⽰。
视距受限平曲线路段黄虚实线划法⽰例/td> [/td]⾊虚实线视距受限的平曲线路段黄虚实线划法⽰例如图。
⾊虚实线视距受限平曲线路段黄虚实线划法⽰例⾊虚实线视距受限的平曲线路段黄虚实线划法⽰例如图。
⾊虚实线视距受限竖曲线路段黄虚实线划法⽰例⾊虚实线视距受限的竖曲线路段黄虚实线划法⽰例如图。
⾊虚实线视距受限竖曲线路段黄虚实线划法⽰例⾊虚实线视距受限的竖曲线路段黄虚实线划法⽰例如图。
⾊虚实线黄⾊单实线禁⽌跨越对向车⾏道分界线黄⾊单实线作为禁⽌跨越对向车⾏道分界线时,禁⽌双⽅向车辆越线或压线⾏驶。
⼀般施划于单⽅向只有⼀条车道或⼀条机动车道和⼀条⾮机动车道道路、视距受限制的竖曲线、平曲线路段及有其他危险需要禁⽌超车的路段,可采⽤振动标线的形式。
禁⽌跨越同向车⾏道分界线⽤于禁⽌车辆跨越车⾏道分界线进⾏变换车道或借道超车。
交通安全 (最终版)PPT课件
3、估计情况
迅速估计现场情况,事故涉及多少人?受伤人员数量及状况?涉及多 少辆车?漏出的燃油是否会着火?现场是否有人受过急救训练?
4、护理伤者
切勿移动受伤者,除非伤者面临危险(如着火、有毒物体渗漏),因为 您的移动可能会造成更大的伤害。如果伤者仍在呼吸,且流血不多,则旁 人不可做任何事情,除非确实懂得怎样护理伤者;不可给伤者喂任何食物 或饮料。
文明交通培训系列
驾车安全及意外防范课程
各类交通标志识别 交通意外的处理方式
关于酒驾
各类交通标志识别
警告标志
十字交叉
T形交叉 向左急弯路
上陡坡
左侧变窄
注意行人
注意儿童
易滑
傍山险路
堤坝路
隧道
渡口
慢行
起伏路
无人看守铁 路道口
注意非机 动车
事故易 发路段
注意危险
禁令标志
禁止通行
禁止驶入
禁止向左转弯
禁止向右转弯
禁止掉头
禁止超车
解除禁止超车 禁止车辆临时或长时停放
禁止车辆长时停放
限制宽度
限制高度
限制速度
解除限制速度
停车检查
减速让行
指示标志
最低限速
干路先行
直行车道
直行和右转合用车道
分向行驶车道
机动车行驶
指路标志
绕行标志
道路交通标线
中心黄色双实线 (严禁车辆跨线或压线行驶)
中心黄色虚实线 (实线一侧禁止车辆越线或左转弯,虚线一
1、马上停车
在汽车运行安全的情况下马上停车,关掉引擎(以免汽车起火)并打 开紧急灯让其闪亮;立即记下对方车的牌号(车上应随时备有笔和纸,甚 至照相机),以防对方在出交通事故后开车跑掉。
驾驶员再培训系列之交通标志识别
外侧车 道 限速8 m/ ,驾驶 员 要按规定 行 驶。 Ok h
对 于路 口上 方的交 通标 志 ,一般 新手很 容 易忽 略 ,因为 目光大都 集 中在前 方车 辆上 ,而 无暇 旁顾。 解决 的 方法是 将
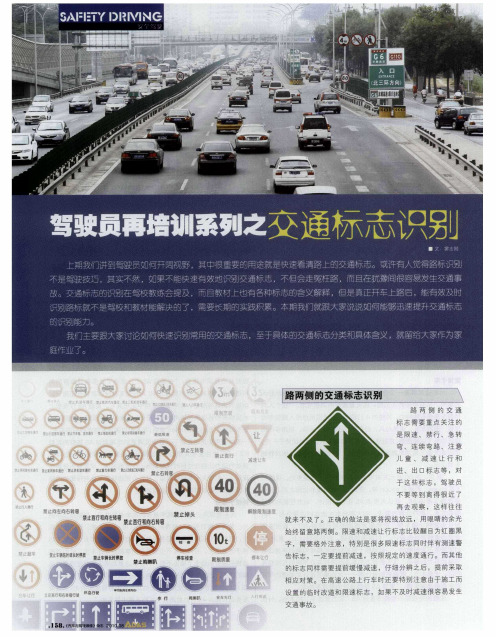
路 两 侧 的 交 通 标 志 识 别
紧 糟 蝎
路 两 侧 的 交 通
标 志 需 要 重 点 关 注 的
是 限 速 、 禁 行 、 急 转
栅
.
琶
絮
弯 、连 续 弯 路 、 注 意 儿 童 、 减 速 让 行 和
业 霹 行 ! 靳 缸 壮盱 止 转 弄车 ! 戢鼍 车 地 iI 耋 禁 翟
路 上 方 的交 通 标 志 识 别
路上 方 的交通标 志 一般 会布置 在桥 梁和横 跨路 面 的横梁 上 ,在高 速公路 上和 邻 近交 叉路 口时多 见 ,多用于 指路 和车
道指 示。 因此行 车至 路 口前一定 要 注意 观察前 方视 野上 方 的
箭 头布 置在 最 右侧 车 道 ,这 就 需要 及 时结 合路 面 上 方的 交通 标
进 、 出 口标 志 等 ,对
4. 0
禁止掉头
■—● ■●
、植 童
限翩麓度
, @ 0
倔
于 这 些 标 志 ,驾 驶 员
不要等到离得很近 了
再 去 观 察 ,这 样 往 往
就来 不 及 了。 正确 的做 法是 要将 视 线 放远 ,用眼 睛 的余 光
1t 0
始终 留 意路 两 侧。 限速 和 减 速让 行 标 志 比较 醒 目为红 圈 黑 字 ,需要 格 外 注意 ,特别 是 很 多 限速标 志 同 时伴 有测 速 警 告 标 志 ,一 定 要提 前减 速 ,按 照 规 定 的速 度通 行 。而 其 他
adas功能指标
adas功能指标ADAS(Advanced Driver Assistance Systems)是一种基于车载电子技术的先进驾驶辅助系统,旨在提高车辆安全性和驾驶舒适性。
ADAS功能指标是衡量这些系统性能的重要指标,下面将分别介绍几个常见的ADAS功能指标。
一、碰撞预警和自动紧急制动(FCW/AEB)碰撞预警(Forward Collision Warning)是ADAS系统中的一项重要功能,它通过车辆前方的传感器和摄像头实时感知前方的障碍物,并在可能发生碰撞的情况下发出警告。
自动紧急制动(Automatic Emergency Braking)则是在FCW的基础上,当系统判断碰撞不可避免时,自动启动制动系统,以减少碰撞的严重程度或避免碰撞发生。
二、车道保持辅助(LKA)车道保持辅助(Lane Keeping Assist)是一种通过摄像头或传感器监测车辆行驶的车道线,并在车辆偏离车道时通过轻微的方向调整来保持车辆在车道内行驶的系统。
它可以提醒驾驶员并协助驾驶员纠正方向,有效降低因驾驶员疲劳或分神而引发的事故风险。
三、自适应巡航控制(ACC)自适应巡航控制(Adaptive Cruise Control)是一种能够根据前方车辆的速度和距离自动调整车辆速度的系统。
它通过激光雷达或摄像头等传感器实时感知前方车辆,并自动调整车辆的速度以保持与前车的安全距离。
ACC可以有效减少驾驶员的疲劳程度,提高行驶的舒适性和安全性。
四、盲点监测(BSD)盲点监测(Blind Spot Detection)是一种通过雷达或摄像头等传感器监测车辆周围盲点的系统。
它可以提醒驾驶员在变道时注意周围的盲区,并发出警告以避免发生侧面碰撞事故。
盲点监测系统可以大大提高驾驶员的视觉范围,减少变道事故的发生。
五、交通标志识别(TSR)交通标志识别(Traffic Sign Recognition)是通过摄像头或传感器实时感知道路上的交通标志,并在驾驶员的仪表盘或车载显示屏上显示相关的交通标志信息。
交通标志识别

指示标志直行向左转弯向右转弯直行和向左转弯表示只准一切车辆直行。
此标志设在直行的路口以前适当位置。
表示只准一切车辆向左转弯。
此标志设在车辆必须向左转弯的路口以前适当位置。
表示只准一切车辆向右转弯。
此标志设在车辆必须向右转弯的路口以前适当位置。
表示只准一切车辆直行和向左转弯。
此标志设在车辆必须直行和向左转弯的路口以前适当位置。
直行和向右转弯向左和向右转弯靠右侧道路行驶靠左侧道路行驶表示只准一切车辆直行和向右转弯。
此标志设在车辆必须直行和向右转弯)的路口以前适当位置。
表示只准一切车辆向左和向右转弯。
此标志设在车辆必须向左和向右转弯的路口以前适当位置。
表示只准一切车辆靠右侧道路行驶。
此标志设在车辆必须靠右侧行驶的路口以前适当位置。
表示只准一切车辆靠左侧)道路行驶。
此标志设在车辆必须靠左侧行驶的路口以前适当位置。
立交直行和左转弯行驶立交直行和右转弯行驶环岛行驶步行表示车辆在立交处可以直行和按图示路线左转弯行驶。
此标志设在立交左转弯出口处适当位置。
表示车辆在立交处可以直行和按图示路线右转弯行驶。
此标志设在立交右转弯出口处适当位置。
表示只准车辆靠右环行。
此标志设在环岛面向路口来车方向适当位置。
表示该街道只供步行。
此标志设在步行街的两端。
鸣喇叭最低限速单行路向左或向右单行路直行表示机动车行至该标志处必须鸣喇叭。
此标志设在公路的急转弯处、陡坡等视线不良路段的起点。
表示机动车驶入前方道路之最低时速限制。
此标志设在高速公路或其他道路限速路段的起点。
表示一切车辆向左或向右单向行驶。
此标志设在单行路的路口和入口处的适当位置。
表示一切车辆单向行驶。
此标志设在单行路的路口和入口处的适当位置。
干路先行会车先行人行横道右转车道表示干路先行,此标志设在车道以前适当位置。
表示会车先行,此标志设在车道以前适当位置。
表示该处为专供行人横穿马路的通道。
此标志设在人行横道的两侧。
表示车道的行驶方向。
此标志设在导向车道以前适当位置。
直行车道直行和有转合用车道分向行驶车道公交线路专用车道表示车道的行驶方向。
项目十一 认识道路交通标志和标线
学习目标
认识道路交通标志和标线。
工作任务
识别道路交通标志和标线。
qc1
任务分析
学习方式可以采用多媒体演示、题库训练、汽车模拟驾驶训练等形式 。
qc1
任务实施
道路交通标志和标线是用图案、符号、文字传递交通管理信息,用以管 制及引导交通的一种安全管理设施。
QC2
任务一 识别道路交通标志
《道路交通标志和标线》规定的交通标志分为七大类:警告标志、禁 令标志、指示标志、指路标志、旅游区标志、道路施工安全标志和辅 助标志。
7.辅助标志 附设于主标志下起辅助说明使用的标志,如图11-7所示。
QC2
图11-7 辅助标志 QC2
任务二 识别道路交通标线
《道路交通标志和标线》规定的道路交通标线分为三大类:指示标线 、禁止标线和警告标线。
1.指示标线 指示车行道、行车方向、路面边缘、人行道等设施的标线,如图1 1-8所示。
图11-10 警告标线 QC2
课外活动
识别平常所看到的道路标志和标线。
QC2
ቤተ መጻሕፍቲ ባይዱ
QC2
1.警告标志 警告车辆和行人注意危险地点的标志,如图11-1所示。
图11-1 警告标志 QC2
2.禁令标志 禁止或限制车辆、行人交通行为的标志,如图11-2所示。
图11-2 禁令标志 QC2
3.指示标志 指示车辆、行人行进的标志,如图11-3所示。
图11-3 指示标志 QC2
4.指路标志 传递道路方向、地点、距离的标志,如图11-4所示。
QC2
图11-8 指示标线 QC2
2.禁止标线 指示道路交通的遵行、禁止、限制等特殊规定,车辆驾驶人员及 行人需要严格遵守的标线,如图11-9所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
神经网络是模拟人脑神经细胞元的网络结构,是由大量神经元相互连接 而成的非线性动态系统。不同于传统的模式分类方法,神经网络所提取 的特征并无明显的物理含义,而是将其存储于各个神经元的连接之中。 此外,神经网络还是一种非常有效的非线性分类器,为解决复杂分类问 题提供了一种可能的解决方式。
交通标志识别 交通标志分类与识别方法主要有:基于各种距离的模板匹配识别方法,基于大 量数据样本的机器学习识别方法以及基于粒子群算法、遗传算法等智能算法的 识别方法。
交通标志识别一般包括检测和识别两部分。检测 一般是利用交通标志的形状和颜色特征,从自然 场景中把交通标志提取出来。识别是把检测出来 的交通标志的内容识别出来。交通标志识别在规 范交通行为、确保安全驾驶等方面具有重要的意 义。 交通标志通常处于室外复杂的环境条件下, 识别的过程中容易受环境光照、方向旋转的影响。
车道标识线的准确检测是实现车辆自动导航和 车辆安全辅助驾驶的首 要问题,为了得到较
理想的车道的标线边缘.利用车道的边缘特征 对车道图像进行二值化和形态学处理,对车道 区域实现准确的边缘检测,最后利用Hough 变换 定位出车道标识线,完成对车道标识线
的识别。实验表明,该方法能实现对复杂环境 下车道标识线的准确识别,具有较好的鲁棒性 和可靠性。
二值化
分割算法是数字图像处理中非常经典的课题,有 着众多可供选择的算法。 最常见的有按像素或处理过像素的灰度值进行分割、利用边缘进行分割、 区域生长等方法。二值化处理是一种灰度处理算法,对于给定的阈值,程 序将灰度大于给定阈值的点变成白点,另外的点变为黑点,经处理后图像 变为只有黑白二色的二值图像。
车道识别与交通标志识别
研究内容
车道特征检测:边缘提取,二值化 车道线检测:霍夫变换
交通标志检测:特征提取(边缘,颜色,形状,LBP) 交通标志识别:神经网络
(LBP指局部二值模式)
研究了汽车辅助驾驶系统中的计算机视觉问题.一方面,用小波变换对高速公路上的道路 边缘进行检测;另一方面,利用灰度以及几何特征实时跟踪和检测车道边缘,通过建立道路 边缘模型,采用数据拟合的方法确定边界轨迹方程,从而估算出公路的延伸方向,实现汽车 的自动防偏,并为解决汽车智能辅助驾驶系统的避障问题提供了有力的保证.
的交通标志检测与识别技术研究,对于增加驾驶安全具有重大的意义。
交通标志检测是进行交通标志分类的前提,同时还压缩了计算目标的空间,减 少后续特征提取算法的运算量,还可以获得更高的识别准确率。
在图像的特征提取领域,常见的特征提取与选择方法有: PCA 主成分分析法 Gabor 特征提取算法 SIFT 特征提取算法 SURF 特征提取算法 Haar 小波特征提取算法/类Haar 小波特征提取算法 不变矩特征提取算法 直方图特征提取算法
车道特征检测
提出了根据高斯分布模型的自适应阈值分割方法,使用了基于形态学变换的二值图 优化算法得到车道线边缘图.改进了概率霍夫变换,使其更能满足实际情况,从而换 检测出车道线.实验表明了该方法可以有效检测出车道线,并且速度上得到了极大的 提高.
原理
霍夫变换(Hough Transform) 霍夫变换是图 像处理中从图像中识别几何形状的基本方法 之一,应用很广泛,也有很多改进算法。主 要用来从图像中分离出具有某种相同特征的 几何形状(如,直线,圆等)。最基本的霍 夫变换是从黑白图像中检测直线(线段)。
禁止标志 指示标志
警告标志
根据交通标志的颜色与形状的 确定关系,我们可以对三种不 同作用交通标志做进一 步的分类,并且把颜色形状分 类的结果作为先验知识用于交 通标志的检测与识别中去。
神经网络分类器由两层网络联结而 成,前层网络由单个BP网络 完成交通标志的粗分工作,后层由3个BP网络将粗分结果分别进 行细分,完成识别任务。此设计结构与传统的单层分类器相比,在 训 练速度和识别正确率方面都有较大的提高;显然,这与神经网络 在解决小规模问题时正确率高、训练速度快相符合。同时,增加 新的训练样本时,只要对相应网络进 行训练即可,而不必对整个网 络进行重新训练。
边缘检测 边缘检测是一种突出图像边缘削弱边缘以外图像区域,突出图像轮廓的方 法。它可以在保留关于物体边界有用的结构信息的同时极大地降低处理 的数据量,从而简化图像的分析过程。边缘两边相邻区域中 的灰度相对 地均匀,只是在通过边缘时灰度发生突变,对于灰度图像,边缘是灰度不连 续的结果。对这种不连续的灰度级变化最有用的两个特征是灰度的变化 率和方向,它们分别以梯度的变化率和方向来表示。
车道线检测
MATLAB实现霍夫变换 目前常用的车道线检测技术是利用道路线的识别来实现道路的检测, 采用直线或曲线的道路模型, 这种方法具有简单实用, 能适应高速共路 结构化环境的特点, 而且具有比较快的图像处理速度和较好的实时性. 在经过图像预处理将车道线分割出来之后, 需要将车道线在图像中的 直线方程拟合出来, 目前常用的拟合方法有最小二乘法和霍夫变换. 霍夫(Ho ug h)直线变换是利用点线的对偶性来实现的, .通过Ho ug h 直线或者对实时性 要求很强的系统来说基本上是不可取的.
概率霍夫变换与普通霍夫变换比较
灰度化效果
统计窗口
统计窗口内的直方图分布
二值图像 膨胀图与腐蚀图的差
膨胀操作效果 概率霍夫变换效果
腐蚀操作效果
我们对左边道路选择最右边 的车道线, 对右边道路选择 最左边的车道线, 得到最终 的当前车道线。
交通标志识别系统是智能交通系统与先进辅助驾驶系统的重要组成部分,提高交通标志检测与识别 算法的准确率和实时性是走向实际应用进程中需要解决的关键问题。算法的准确率是交通标志识别 研究中一个十分重要的因素,错误的识别结果不仅不能起到辅助驾驶作用,还会导致严重的安全事 故。而算法的实时性决定了研究成果能否转化为具有实际应用价值的产品。在汽车数量日益增加、 交通安全事故居高不下,要求不断提升汽车的驾驶智能化的现实压力面前,开展以实时应用为目标