单闭环直流调速系统的设计与仿真实验报告.doc
单闭环不可逆直流调速系统仿真实验设计

课程设计单闭环不可逆直流调速系统仿真实验设计指导教师:学院:专业:班级:姓名:学号:目录任务书 (3)概述 (4)原理 (5)建模与参数设置 (12)仿真结果及分析 (16)参考文献 (17)附图 (18)任务书单闭环不可逆直流调速系统仿真实验设计1.画出系统的仿真模型2.主电路的建模和模型的参数设置(1)三相对称交流电压源的建模和参数设置(2)晶闸管整流的建模和参数设置(3)平波电抗器的建模和参数设置(4)直流电动机的建模和参数设置(5)同步脉冲触发器的建模和参数设置3.控制电路的建模和参数设置4.系统的仿真参数设置5.系统的仿真,仿真结果的输出及结果分析6.打印说明书(B5),并交软盘(一组)一张。
注意事项:1.系统建模时,将其分成主电路和控制电路两部分分别进行2.在进行参数设置时,晶闸管整流桥、平波电抗器、直流电动机等的参数设计原则如下:如果针对某个具体参数设置,则对话框的有关参数应取装置的实际值;如果不针对某歌剧厅的装置的一般情况,可先去这些装置的参数默认值进行仿真。
若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数。
3.给定信号的变化范围、调节器的参数的反馈检测环节的反馈系数等可调参数的设置,其一般方法是通过仿真试验,不断进行参数优化.4.仿真时间根据实际需要而定,以能够仿真出完整的波形为前提.5.仿真算法的选择:通过仿真实践,从仿真能否进行、仿真的速度、仿真的精度等方面进行选择。
为了提高直流调速系统的动静态性能指标,通常采用闭环系统。
对调速指标要求不高的场合,采用单闭环系统,按反馈的方式不同分为转速反馈、电流反馈、电压反馈、本次设计中采用的为单闭环不可逆直流调速系统。
转速单闭环系统原理如图1所示,图中将反映转速变化的电压信号作为反馈信号,经速度变换后接到电流调节器的输入端,与给定的电压相比较经放大后,得到移相控制电压Uct,用作控制整流桥的触发电路,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变三象全控整流电路的输出电压,这就构成了速度反馈闭环系统。
直流调速系统设计实训报告
1 单闭环直流调速系统对于单闭环直流调速系统来说,转速是输出量,一般我们引入的是转速负反馈构成闭环调速系统。
转速负反馈系统是在电动机上安装一台测速电机TG,引出和输出量转速成正比的负反馈电压Un,和转速给定电压Ua*进行比较,得到偏差电压ΔUa,经过放大器A,产生驱动或触发装置的控制电压Uct,与控制电动机的转速,组成了反馈控制的闭环调速系统。
在单闭环系统中,转速单闭环使用较多。
而一般采用的比例调节器的调速系统还是有静差,为了消除静差,可用积分调节器替代比例调节器。
反馈控制系统的规律是如果要想维持系统中的某个物理量基本不变,就要引用该量的负反馈信号去与恒量给定相比较,组成一个闭环系统。
对于调速系统来说,如果想提高静态指标,就得提高静特性硬度,也就是希望转速在负载电流变化时或受到扰动时基本不变。
要想维持转速这一物理量不变化,最有效和最直接的方法就是采用转速负反馈构成转速闭环调节系统。
1.1 主电路设计直流调速系统电路的组成主要由主电路和控制电路两大部分组成,知道了电路组成的两大部分后,就应该确定主电路的接线方式和系统的控制方案。
整流变压器由变压部分和整流部分组成,其变压部分将电网电压降压并变成稳定的交流电,整流部分将变压后的交流电整流为恒定40V的直流电压供给直流电动机的励磁回路,整流变压器变压后的交流电两端另接一个单相桥式全控整流电路,输出的可调直流电加在直流电动机的电枢回路。
保护环节采用的是过电压保护的一种--阻容吸收,将其并联在整流变压器二次侧起到保护电路的作用。
主电路的设计需要准备的资料:1 单相整流模块:MZKD-ZL-50了解其功能,技术参数,电路内部结构,外部接法,控制线管脚接法,安装说明2电机参数:直流电机,额定电压24V,额定电流6A,励磁电压24V,最大允许电流50A,了解电机不同的接线形式,重点掌握电机他激(并激)方式为了防止系统内部瞬间过电压冲击(主要为断路器、接触器开断产生的操作过电压),过流,浪涌等对重要电气设备的损伤,就要增加保护电路的设计,通常的电路保护的方法有过压保护和过流保护。
单闭环直流调速系统的设计与Matlab仿真(一)
课题:一、单闭环直流调速系统的设计与Matlab 仿真(一)作者:学号:专业:班级:指导教师:摘要在对调速性能有较高要求的领域,如果直流电动机开环系统稳态性能不满足要求,可利用速度负反馈提高稳态精度,而采用比例调节器的负反馈调速系统仍是有静差的,为了消除系统的静差,可利用积分调节器代替比例调节器。
通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较原始系统和校正后系统的差别,得出直流电机调速系统的最优模型,然后用此理论去设计一个实际的调速系统。
本设计首先进行总体系统设计,然后确定各个参数,当明确了系统传函之后,再进行稳定性分析,在稳定的基础上,进行整定以达到设计要求。
另外,设计过程中还要以Matlab 为工具,以求简明直观而方便快捷的设计过程。
摘要:Matlab 开环闭环负反馈静差稳定性V-M 系统目录摘要 (2)一、设计任务 (4)1、 ...................................................... 已知条件42、设计要求 (4)二、方案设计 (5)1、 ...................................................... 系统原理52、 ........................................................ 控制结构图 (6)三、参数计算 (7)四、P I调节器的设计 (9)五、系统稳定性分析 (11)六、小结 (12)七、参考文献 (13)1、已知条件已知一晶闸管-直流电机单闭环调速系统(V-M 系统)的结果如 图所示。
图中直流电机的参数:Pnom=2.2KW nnom=1500r/min ,Inom=12.5A , Unom=220V 电枢电阻Ra=1欧,V-M 系统主回路总电阻 R=2.9欧,V-M 系统电枢回路总电感L=40mH 拖动系统运动部分飞轮力矩GD2=1.5N.m2测速发动机为永磁式,ZYS231/110xi 型,整流触2、设计要求:(1) 生产机械要求调速围D=15 (2) 静差率s < 5%(3) 若 U*n=10V 时,n=nnom=1500r/min ,校正后相角稳定裕度丫 =45o ,剪切频率3 c >35.0rad/s ,超调量30% 调节时间ts < 0.1s倍号詮丨1、控制原理根据设计要求,所设计的系统应为单闭环直流调速系统,选定转速为反馈量,采用变电压调节方式,实现对直流电机的无极平滑调速。
单闭环直流调速系统的设计与仿真实验报告

单闭环直流调速系统的设计与仿真实验报告摘要:本文基于基本原理和方法,设计和仿真了一个单闭环直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,包括PID控制器的参数调整方法。
接下来使用Matlab/Simulink软件进行系统仿真实验,对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
关键词:直流电机调速、单闭环控制系统、PID控制器、仿真实验一、引言直流电机广泛应用于机械传动系统中,通过调节电机的电压和电流实现电机的调速。
在实际应用中,需要确保电机能够稳定运行,并满足给定的转速要求。
因此,设计一个高性能的直流调速系统至关重要。
本文基于单闭环控制系统的原理和方法,设计和仿真了一个直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,并采用PID控制器进行调节。
接着使用Matlab/Simulink软件进行系统仿真实验,并对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
二、直流电机调速的基本原理直流电机调速是通过调节电机的电压和电流实现的。
电压变化可以改变电机的转速,而电流变化可以改变电机的转矩。
因此,通过改变电机的电压和电流可以实现电机的调速。
三、控制系统设计和参数调整根据系统的要求,设计一个单闭环控制系统,包括传感器、控制器和执行器。
传感器用于测量电机的转速,并将信息传递给控制器。
控制器根据测量的转速和给定的转速进行比较,并调节电机的电压和电流。
执行器根据控制器的输出信号来控制电机的电压和电流。
在本实验中,采用PID控制器进行调节。
PID控制器的输出信号由比例项、积分项和微分项组成,可以根据需要对各项参数进行调整。
调整PID控制器的参数可以使用试错法、频率响应法等方法。
四、系统仿真实验使用Matlab/Simulink软件进行系统仿真实验,建立直流调速系统的模型,并对系统进行性能评估。
实验项目二:转速单闭环直流调速系统实验
实验项目二:转速单闭环直流调速系统实验实验日期:2020年5月25日一、实验目的(1)了解单闭环直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握晶闸管直流调速系统的一般仿真调试过程。
(3)认识闭环反馈控制系统的基本特性。
二、实验原理在电流单闭环中,将反映电流变化的电流互感器输出电压信号作为反馈信号加到电流调节器的输入端,与给定的电压相比较,经放大后,得到移相控制电压Uct,控制整流桥的触发电路,改变三相全控整流的电压输出,从而构成了电流负反馈闭环系统。
电机的最高转速也由电流调.节器的输出限幅所决定。
电流调节器若采用P 调节,对阶跃输入有稳态误差,要消除该误差将调节器换成PI调节。
当给定恒定时,闭环系统对电枢电流变化起到了抑制作用,当电机负载或电源电压波动时,电机的电枢电流能稳定在一定的范围内变化。
三、实验内容(1)单闭环有静差转速负反馈调速系统的建模与仿真。
(2)单闭环有静差转速负反馈调速系统的建模与仿真。
四、实验所需仪器安装Matlab仿真软件的PC机五、实验步骤单闭环有静差转速负反馈调速系统的结构图:图2.1单闭环无静差转速负反馈调速系统的结构图:图2.2六、实验结果单闭环有静差转速负反馈调速系统的仿真图:图2.3单闭环无静差转速负反馈调速系统的仿真图:(1)变负载:图2.4(2)变电压:①5V:图2.5 ②8V:图2.6 ③10V:图2.7七、实验小结转速闭环调速系统是一种最简单的反馈控制系统,具有反馈控制的基本规律,它应用的比例调节器是一种有静差的控制系统,开环放大系数K对闭环系统的稳态性能有很大影响。
K值越大,稳态性能越好。
当在2s负载由50变为100时,由于开环无法起调节作用,转速下降。
对于单闭环无静差转速负反馈调速系统,当给定电压信号改变时,转速曲线也跟着改变,电机转速以此变成110ad/sec,85ad/sec,50ad/sec.闭环系统绝对服从于给定输入,而且能对被包围在负反馈环内的一切主通道上的扰动有效地加以抑制,对给定电源和反馈检测元件中的误差无力克服。
单闭环直流调速系统的设计与仿真实验报告精修订
单闭环直流调速系统的设计与仿真实验报告标准化管理部编码-[99968T-6889628-J68568-1689N]比例积分控制的单闭环直流调速系统仿真一、实验目的1.熟练使用MATLAB 下的SIMULINK 仿真软件。
2.通过改变比例系数K K 以及积分时间常数τ的值来研究K K 和τ对比例积分控制的直流调速系统的影响。
二、实验内容1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析三、实验要求建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定性,快速性等的影响。
四、实验原理图4-1 带转速反馈的闭环直流调速系统原理图调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,唯一的方法采用反馈控制技术,构成转速闭环的控制系统。
转速闭环控制可以减小转速降落,降低静差率,扩大调速范围。
在直流调速系统中,将转速作为反馈量引进系统,与给定量进行比较,用比较后的偏差值进行系统控制,可以有效的抑制甚至消除扰动造成的影响。
当t=0时突加输入K in 时,由于比例部分的作用,输出量立即响应,突跳到K ex (K )=K K K in ,实现了快速响应;随后K ex (K )按积分规律增长,K ex (K )=K K K in +(K /τ)K in 。
在K =K 1时,输入突降为0,K in =0,K ex (K )=(K 1/τ)K in ,使电力电子变换器的稳态输出电压足以克服负载电流压降,实现稳态转速无静差。
五、实验各环节的参数及K K和1/τ的参数的确定各环节的参数:直流电动机:额定电压K N=220V,额定电流K dN=55A,额定转速K N=1000r/min,电动机电动势系数K e= min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数K s=。
电枢回路总电阻R=Ω,电枢回路电磁时间常数K l=电力拖动系统机电时间常数K m=。
转速反馈单闭环直流调速系统仿真
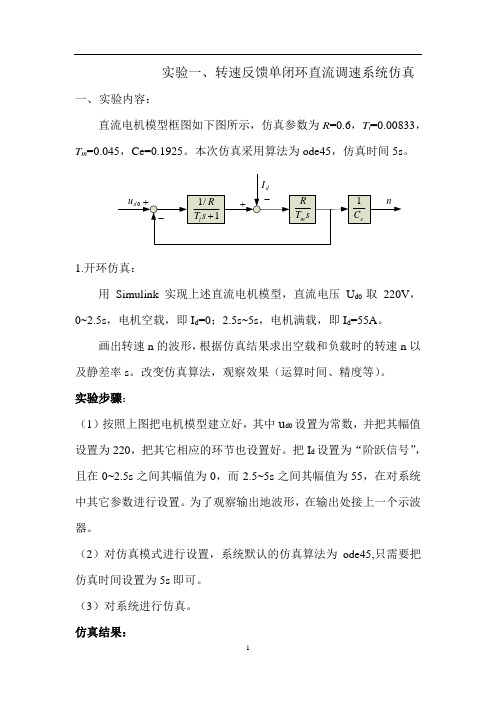
实验一、转速反馈单闭环直流调速系统仿真一、实验内容:直流电机模型框图如下图所示,仿真参数为R=0.6,T l=0.00833,T m=0.045,Ce=0.1925。
本次仿真采用算法为ode45,仿真时间5s。
1.开环仿真:用Simulink实现上述直流电机模型,直流电压U d0取220V,0~2.5s,电机空载,即I d=0;2.5s~5s,电机满载,即I d=55A。
画出转速n的波形,根据仿真结果求出空载和负载时的转速n以及静差率s。
改变仿真算法,观察效果(运算时间、精度等)。
实验步骤:(1)按照上图把电机模型建立好,其中u d0设置为常数,并把其幅值设置为220,把其它相应的环节也设置好。
把I d设置为“阶跃信号”,且在0~2.5s之间其幅值为0,而2.5~5s之间其幅值为55,在对系统中其它参数进行设置。
为了观察输出地波形,在输出处接上一个示波器。
(2)对仿真模式进行设置,系统默认的仿真算法为ode45,只需要把仿真时间设置为5s即可。
(3)对系统进行仿真。
仿真结果:(1)仿真算法为ode45:图1 上图即为电机转速的仿真结果图,同图上我们可以看出来分为了两个阶段,其中第一个阶段(0~2.5s)为空载转速,第二阶段(2.5~5s)为满载转速。
空载转速为1142n/min。
在2.5s时加入了负载,通过仿真结果我们可以看出来,负载转速为972n/min。
这可以看出来在加入负载之后,电机的转速开始下降。
根据电机转差率的公式s=(n0-n)/ n0=(1142-972)/1142=0.149。
转差率还是比较小的,说明该电机效率比较高。
通过观察该仿真的时间,其运算时间为T=9.134*10^-7s。
(2)仿真算法为ode23:仿真结果图如图2所示,由图我们可以看出来,结果基本上和计算方法为ode45的结果一样,但是运算时间却不一样,该算法的运算时间为T=3.636*10^-7s。
运算时间比ode45的时间短。
单闭环直流调速系统的设计与仿真
大学本科毕业设计单闭环直流调速系统的设计与仿真学生姓名院系名称专业名称电气工程及其自动化班级级学号指导教师完成时间年月日单闭环直流调速系统的设计与仿真内容摘要:在对调速性能有较高要求的领域,如果直流电动机开环系统稳态性能不满足要求,可利用速度负反馈提高稳态精度,而采用比例调节器的负反馈调速系统仍是有静差的,为了消除系统的静差,可利用积分调节器代替比例调节器。
通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较原始系统和校正后系统的差别,得出直流电机调速系统的最优模型。
然后用此理论去设计一个实际的调速系统,并用MATLAB仿真进行正确性的验证。
关键词:稳态性能稳定性开环闭环负反馈静差The design and simulation ofSingle loop dc speed control systemAbstract :In the higher demand for performance of speed, if the open loop dc system's steady performance does not meet the requirements, can use speed inverse feedback to improve steadystate precision, but although the speed inverse feedback system adopts proportion regulator,it still have off, in order to eliminate static, can use integral regulator to replace proportion regulator.Based on the theoretical analysis of the single closed loop system which is made up of controllable power, the regulator which is made up of operational amplifier, a rectifier triggered by thyristor , motor model and tachogenerators module, compare the difference of the open loop system and the closed loop system,the original system and the this paper compares the theory of open loop system and the closed-loop system, the difference of primitive system and calibrated system, conclude the optimal model of the dc motor speed control system. Then use this theory to design a practical control system, and verify the validity with MATLAB simulation.Key words: steady-statebehaviour stability open loop Close-loop feedback offset目录1绪论 (1)1.1直流调速系统概述 (1)1.2 MATLAB简介 (1)2 单闭环控制的直流调速系统简介 (2)2.1 V—M系统简介 (2)2.2转速控制闭环调速系统的调速指标 (2)2.3闭环调速系统的组成及静特性 (3)2.4反馈控制规律 (4)2.5主要部件 (5)2.5.1 比例放大器 (5)2.5.2 比例积分放大器 (5)2.5.3额定励磁下直流电动机 (7)2.6稳定条件 (8)2.7稳态抗扰误差分析 (8)3 单闭环直流调速系统的设计及仿真 (10)3.1参数设计及计算 (10)3.1.1参数给出 (10)3.1.2 参数计算 (10)3.2有静差调速系统 (11)3.2.1有静差调速系统的仿真模型 (11)3.2.2主要元件的参数设置 (12)3.2.3仿真结果及分析 (12)3.2.4 动态稳定的判断,校正和仿真 (13)3.3无静差调速系统 (15)3.3.1 PI串联校正的设计 (15)3.3.2无静差调速系统的仿真模型 (17)3.3.3主要元件的参数设置 (18)3.3.4仿真结果及分析 (18)3.4有静差调速系统和无静差调速系统的动态分析设计 (19)3.4.1有静差调速系统的仿真模型 (19)3.4.2参数设置 (19)3.4.3仿真结果及分析 (19)参考文献 (23)致谢 (24)1绪论1.1直流调速系统概述从生产机械要求控制的物理量来看,电力拖动自动控制系统有调速系统、位置随动系统、张力控制系统等多种类型,而各种系统往往都是通过控制转速来实现的,因此调速系统是最基本的拖动控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
比例积分控制的单闭环直流调速系统仿真
一、实验目的
1.熟练使用MATLAB下的 SIMULINK仿真软件。
2 .通过改变比例系数以及积分时间常数τ的值来研究和τ对比例积分控制的直流调速
系统的影响。
二、实验内容
1.调节器的工程设计
2.仿真模型建立
3.系统仿真分析
三、实验要求
建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定
性,快速性等的影响。
四、实验原理
~
+
+
+
+
A UPE M
_
_
_ - +
_
+ +
TG
_
-
图 4-1 带转速反馈的闭环直流调速系统原理图
调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,
唯一的方法采用反馈控制技术,构成转速闭环的控制系统。
转速闭环控制可以减小转速降落,降
低静差率,扩大调速范围。
在直流调速系统中,将转速作为反馈量引进系统,与给
定量进行比较,用比较后的偏差值进行系统控制,可以有效的抑制甚至消除扰动造成的影响。
当 t= 0时突加输入时,由于比例部分的作用,输出量立即响应,突跳到,实现了快速响应;随后按积分规律增长,。
在时,输入突降为0,=0,=,使电力电子变换器的稳态输出电压足以克服负载
电流压降,实现稳态转速无静差。
五、实验各环节的参数及和 1/ τ的参数的确定
各环节的参数:
直流电动机:额定电压=220V,额定电流=55A, 额定转速=1000r/min,电动机电动势系数= ? min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数=44,滞后时间常数=。
电枢回路总电阻R=Ω,电枢回路电磁时间常数=电力拖动系统机电时间常数=。
转速反馈系数= ? min/r。
对应额定转速时的给定电压=10V。
稳态性能指标D=20, s 5% 。
和 1/ τ的参数的确定:
PI 调节器的传递函数为
其中,。
(1)确定时间常数
1)整流装置滞后时间常数;
2)转速滤波时间常数;
3)转速环小时间常数;
( 2)计算参数
按跟随和抗扰性都较好的原则,取h=5,则调节器超前时间常数,即积分时间常数:
,则
由此可得开环增益:
于是放大器比例放大系数:
六、仿真模型的建立
如图6-1 为比例积分控制的无静差直流调速系统的仿真框图,根据仿真框图,利用MATLAB下的 SMULINK软件进行系统仿真,建立的仿真模型如图6-2 所示。
+ _
+ n(s)
+
+ _ +
_
图 6-1 比例积分控制的无静差直流调速系统的仿真框图
图 6-2 比例积分控制的无静差直流调速系统的仿真模型
七、仿真模型的运行
利用中所求的和 1/ τ代入 PI 调节器中,此处取=,1/ τ =。
图 7-1 无静差调速系统输出( Scope 图像)图 7-
2 输出波形比例部分( Scope1 图像)
对比图 7-1 和图 7-2 可以发现,只应用比例控制的话,系统响应速度快,但是静差率大,而添加积分环节后,系统既保留了比例环节的快速响应性,又具有了积分环节的无静差调速特性,使调速系统稳定性相对更高,动态响应速度也快。
八、仿真结果分析(修改和 1/ τ的参数,观察Scope 曲线变化)
当取=,1/ τ =3 时,系统转的响应无超调,但调节时间很长。
如图8-1 所示:
图 8-1无超调的仿真结果
当=,1/ τ =15 时,系统转速的响应的超调较大,但快速性较好。
如图8-2 所示。
图 8-2 超调较大的仿真结果
控制系统的各项动态跟随性能指标与参数KT有关。
当系统的时间常数 T 一定时,随着开
环增益 K 的增大,系统的快速性提高,而稳定性变差。
若要求动态响应快,则把K取得大一点;若要求超调小,则把K 取得小一点。
九、心得体会
通过此次试验,使我对MATLAB中的SIMULINK 仿真软件也有了进一步的了解,通过
SIMULINK 仿真软件的仿真功能,可以用图像化的方法直接建立系统模型,使我可以很直观
方便地了解一些系统特性。
同时通过自己动手做实验,计算数据,使我对比例积分控制的无静差直流电机调速系统又有了更深层次的学习。