雷达防撞系统故障诊断
超声波雷达 故障诊断流程
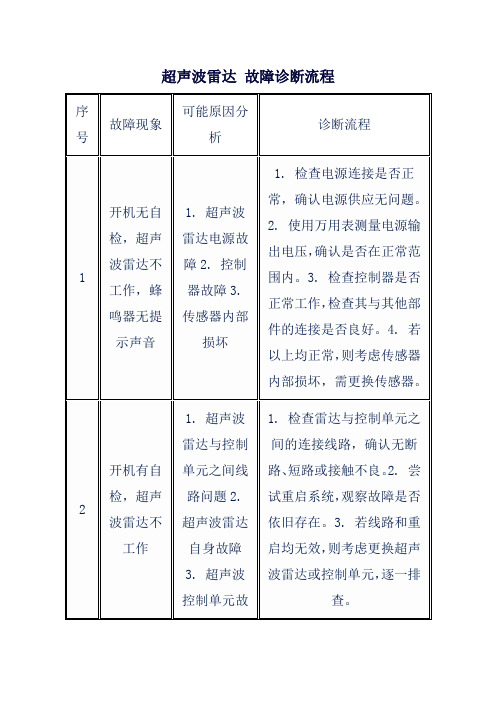
开机有自检,超声波雷达不工作
1. 超声波雷达与控制单元之间线路问题2. 超声波雷达自身故障3. 超声波控制单元故障
1. 检查雷达与控制单元之间的连接线路,确认无断路、短路或接触不良。2. 尝试重启系统,观察故障是否依旧存在。3. 若线路和重启均无效,则考虑更换超声波雷达或控制单元,逐一排查。
3
开机有自检,超声波雷达误报警
超声波雷达 故障诊断流程
序号
故障现象
可能原因分析
诊断流程
1
开机无自检,超声波雷达不工作,蜂鸣器无提示声音
1. 超声波雷达电源故障2. 控制器故障3. 传感器内部损坏
1. 检查电源连接是否正常,确认电源供应无问题。2. 使用万用表测量电源输出电压,确认是否在正常范围内。3. 检查控制器是否正常工作,检查其与其他部件的连接是否良好。4. 若以上均正常,则考虑传感器内部损坏,需更换传感器。
1. 超声控制单元与显示控制单元之间总线故障2. 超声波控制单元故障3. 显示控制单元故障
1. 检查通讯总线连接是否正常,确认无断路、短路或接触不良。则考虑更换超声波控制单元或显示控制单元,逐一排查。
1. 超声波雷达安装问题2. 超声波探头有异物3. 超声波雷达自身损坏4. 超声波控制单元故障
1. 检查超声波雷达的安装位置和角度是否正确,确保无遮挡物。2. 清洁超声波探头,确保其表面无异物。3. 若以上均正常,尝试重新标定超声波雷达。4. 若问题依旧,考虑更换超声波雷达或控制单元。
4
开机有自检,超声波雷达无法与显示控制单元通讯
[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障
![[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障](https://img.taocdn.com/s3/m/b8535c41326c1eb91a37f111f18583d049640f75.png)
[汽车维修与保养:倒车雷达常见故障及维修技巧]倒车雷达常见故障汽车维修与保养:倒车雷达常见故障及维修技巧近些年来,汽车电子产品的更新换代日渐加快,倒车雷达作为汽车上一种新型的电子产品也逐渐走进了人们的日常生活中。
倒车雷达全称叫做“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的图像显示来告知驾驶员车後乃至是周围障碍物的情况,解除驾驶员在泊车、倒车和启动车辆时因为前後左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达从最早的只能够发出“倒车请注意”提示音,到现在能够彩色显示、蜂鸣器提示音的无线倒车雷达,在短短几年的时间内完成了六代的升级更新,方便的性能,跨越较大的价格区间,让越来越多的车主开始在爱车上加装倒车雷达,而这也对售後维修提出了新的要求。
笔者结合工作中遇到的一些故障案例,总结了一些倒车雷达在维修诊断方面的知识,希望能够对读者保养爱车和售後维修人员有所帮助。
一、倒车雷达的结构和工作原理倒车雷达一般由探头(超声波传感器)、控制器和蜂鸣器三部分构成,一些系统还会配有显示器,不过工作原理基本是一样的。
探头:将电信号转化成超声波,并将返回的超声波重新转化成电信号。
控制器:主要是发射正弦波脉冲电信号给探头(超声波传感器),并处理其接收到的信号,换算出距离值後将数据与显示器进行通讯。
蜂鸣器和显示器:接收主机距离数据後,根据距离远近显示距离值并发出不同级别的距离报警音。
在整个倒车雷达系统里面,控制器和显示器一般都是集成的电子产品,故障率较低,维修时也采用整体更换的方式,所以再次不做过多描述,本文主要介绍探头的系统功能。
1 探头的工作波形和在系统内的应用当探头正常工作的时候,探测到的波形如图1所示。
当控制器给探头发送一个电信号後,探头压电片震动产生超声波,而且由于圆形压电片的结构,发射出的超声波会有一定的指向性,波束截面类似椭圆,所以探头探测范围是有一定限制的,一般在水平面上的探测角度为120°,在垂直面上的探测角度为60°,如图2所示。
汽车安全与舒适系统检测与维修课程教案

《汽车安全与舒适系统检测与维修》课程教案
一、管理信息
课程代码:制订人:
所属系部:批准人:
制订时间:
二、基本信息
学分:4
学时:64学时
课程类型:专业课
适用专业:汽车电子技术专业、汽车检测与维修专业
先修课:电工与电子技术、汽车传感器、汽车发动机构造及维修
三、课程定位
《汽车安全与舒适系统检测与维修》课程学习领域定位依据是汽车维修服务岗位中汽车安全与舒适设备维修典型工作任务,随着汽车消费者对汽车安全性能和舒适性要求不断提高,汽车上安装的有关安全和舒适的设备也越来越复杂,我们有必要根据市场的规律,安排这样一门专业课程,进行专门的介绍。
学生通过课程的学习,能对汽车安全与舒适电器设备相关电路进行分析,对相关线路和元件进行必要的检测,认定故障原因,最后予以排除。
总之应具备一下几个方面的核心能力:一是对汽车电路系统的认知能力;二是对电器元件的检测能力、工作状况的判断能力;三是对故障的判断和推理能力;四是维修经验的总结和应用能力。
《汽车安全与舒适系统检测与维修》课程将重点要求掌握汽车安全与舒适系统主要设备的结构原理和故障检修,包括汽车空调系统、汽车安全气囊、汽车防盗系统、汽车雷达防撞系统、汽车定速巡航系统、汽车音响系统等。
四、课程设计。
智能网联汽车激光雷达传感器常见故障诊断

76 汽车维护与修理 2022·11下半月激光雷达传感器是智能网联汽车重要的感知元件,激光雷达传感器主要用于探测远距离障碍物,通过扫描障碍物信息生成点云图,然后通过网线最终将障碍物信息传输至智能网联汽车自动驾驶处理器中,配合智能网联汽车其他传感器实现汽车智能驾驶功能。
激光雷达传感器被认为是智能网联汽车的“眼睛”,是一种远距离传感器,由1个圆柱形接口连接至激光雷达传感器接线盒,激光雷达传感器如图1所示。
激光雷达传感器接线盒如图2所示,激光雷达传感器连接至激光雷达传感器接线盒,激光雷达传感器接线盒将激光雷达传感器的点云图信息通过网线传输至自动驾驶处理器,由于激光雷达传感器点云数据的信息量较大,因此采用网线传输数据,而不采用CAN 总线,从而加快数据传输效率。
1 智能网联汽车激光雷达传感器的故障分析激光雷达传感器作为智能网联汽车重要的感知元件之一,主要用于探测远距离障碍物信息,包括环境信息、行人和车等,通过分析激光雷达传感器的结构特点及功能发现,当激光雷达传感器出现故障时,会导致智能网联汽车无法正常避障,有冲撞行人的危险,此时应关闭自动驾驶模式,将车辆行驶至维修车间。
激光雷达传感器故障分为硬件故障和软件故障2种类型,本文以中华人民共和国第一届职业技能大赛小车为例,对激光雷达传感器的故障诊断进行介绍。
(1)硬件故障。
首先尝试通过Apollo 系统进入自动驾驶系统,读取激光雷达传感器数据信息,若显示传感器未连接,则可使用数字万用表检查激光雷达传感器电源线束和网线,排除线束故障后,再检查激光雷达传感器是否发生故障,若激光雷达传感器故障,则更换激光雷达传感器。
排除硬件故障后,继续检查激光雷达传感器软件运行是否正常。
(2)软件故障1。
进入Apollo 系统,若能读取到激光雷达传感器数据,但数据不在正常范围,则继续检查激光雷达传感器检测范围,进而更改激光雷达传感器感知距离参数。
若激光雷达传感器工作在单线模式,则更改激光雷达传感器线数,一般智能网联汽车多采用16线或32线,随着线数的增多,激光雷达传感器处理的数据也成倍增加。
汽车倒车雷达系统故障诊断

汽车倒车雷达系统故障诊断摘要:本篇文章对汽车倒车雷达的结构特征、基本原理及工作电源电路开展了基础理论剖析,论述汽车倒车雷达的常见故障检修和诊断操作过程,并以汽车倒车雷达不运行的常见故障、汽车倒车雷达操作系统常警报和乱警报的常见故障为例,详细说明倒车雷达系统故障诊断和检修的具体方法步骤,对于不符合标准规定的操作系统故障零部件,必须按照要求及时替换或检修。
关键词:汽车倒车;雷达系统;故障诊断一、引言伴随着经济社会的发展进步和交通运输的多元化,汽车早已渗入人们的日常生活。
汽车电路系统的产生,极大地提高了驾驶人员的驾驶舒适度和安全系数。
汽车倒车雷达操作系统的配置,提升了驾驶人员在停车行进的安全系数。
笔者就汽车倒车雷达操作系统的基本原理开展剖析,对汽车倒车雷达的常见操作系统故障的诊断和维修手段开展深层次剖析,让大家倒车雷达操作系统有更为全方位的认知。
二、倒车雷达系统分类机器工作基本原理汽车倒车雷达操作系统由于车型号精确定位、成本费用造价、全车系统架构等要素的影响,分成下面几类形式:(一)有单独控制器,无网络通信协议。
汽车倒车雷达操作系统由雷达探测探测头、智能控制器、蜂鸣警报系统或显示仪表组合而成,各部件相互之间的连接借助硬线通信设备。
探测头与智能控制器相互之间借助硬线连接,每一个探测头相互之间有独立的交流电源搭铁或是同用交流电源搭铁。
独立探测头毁损不干扰别的探测头的常规运行。
具体工作原理:控制器接收倒挡控制开关数据信号后运行,驱使雷达探测探测头测探阻碍物,测算探测头与阻碍物的间距,到达警报间距后操控蜂鸣报警系统运行。
蜂鸣报警系统通常集成化在智能控制器里面,或是独立组装在汽车驾驶室内,借助硬线与汽车倒车雷达智能控制器连接。
若有显示仪表,则借助波段展示阻碍物的近远间距。
某些车型找不到显示仪表,唯有蜂鸣警报系统提示驾驶人员阻碍物的间距相关信息,蜂鸣器集成化在汽车倒车雷达智能控制器里面。
(二)有单独控制器,使用控制器局域网络的网络通信协议。
交通提醒与防撞系统介绍及其常见故障分析
À T / A ( 交通咨询) 。在T CA S 计算机所输出的交通咨
无法正 常获得由应答 机提供的数据时, XP N DR 指示器 询信息不能正常输出到相应的显示器上显示时, T / A 红
46
江 苏 航 空
总第 127 期
色指示器灯亮。
障还是可以被发现的。如: T CA S 下天线有水或被水腐蚀,
4 TCAS 系统的工作概况
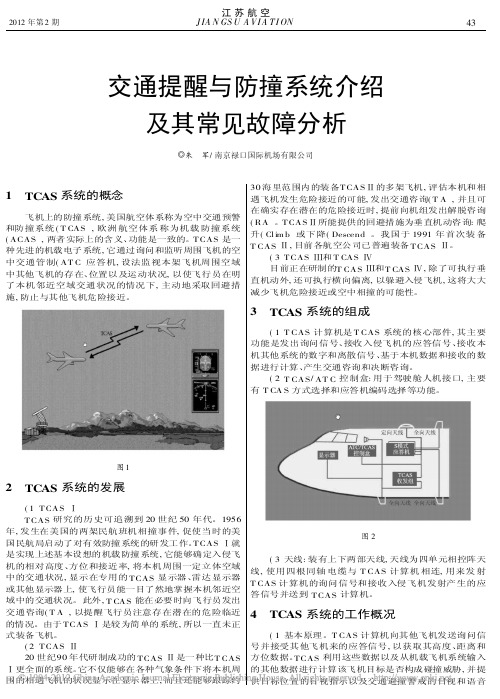
( 1) 基本原理。T CA S 计算机向其他飞机发送询问信 号并接受其他飞机来的应答信号, 以获取其高度、距离和 方位数据。T CA S 利用这些数据以及从机载飞机系统输入 的其他数据进行计算该飞机目标是否构成碰撞威胁, 并提 供目标位置的目视指示以及交通避撞警戒的目视和语音
笔 者 认为, 首先 应 依据 飞机 维护 手册 ( AMM ) , 对 T CA S 进行测试, 查找故障源。对我们过站机务来说, 尤其 可以保证快速地将准确的故障信息及时地反馈给航空公
司, 以便其第一时间制定出有效的故障隔离方案。以B737300 为例, T CA S 的测试分为两种。
图6
( 1) T CA S 在驾驶舱的自测试
( 2) TCAS Ⅱ 20 世纪90 年代研制成功的 T CA S Ⅱ是一种比T CA S Ⅰ更全面的系统。它不仅能够在各种气象条件下将本机周 围的相遇飞机的状况显示在显示器上, 而且还能够跟踪约
图2
( 3) 天线: 装有上下两部天线, 天线为四单元相控阵天 线, 使用四根同轴 电缆与 T CA S 计算机 相连, 用来发 射 T CA S 计算机的询问信号和接收入侵飞机发射产生的应 答信号并送到 T CA S 计算机。
( 3) 信号交连。T CA S 为实现避撞功能, 一方面需获取
雷达故障分析
波导开关和波导管导致的雷达故障分析作者:万海焰杨祝平进入夏季,雷雨频发,气象雷达作为飞机自备的气象导航设备,对于飞行员饶飞雷雨区、保障飞行安全的重要性不言而喻,其作为飞行员的眼睛的作用非常突出,本文从实际例子出发,简述波导开关和波导管导致的气象雷达故障,文章结尾提出维修建议,仅做参考。
一、故障现象:机组空中反映右气象雷达故障,空中选择右侧雷达时无雷达图像,该机前一航班已反映该故障,并在北京更换右雷达收发机,且测试正常。
二、故障处理过程地面在CMC上测试右侧气象雷达通过,但选择气象位测试右侧雷达却无雷达图像,判断波导电门故障,更换电门后测试雷达图像正常。
这不禁让人疑惑,为什么CMC上测试能通过,而实际上右侧气象雷达失效,下面就雷达系统原理简要作一分析。
同时此次飞机故障还发现了从波导开关出来的第一段公共波导管裂开损伤,已经穿透波导管,如下图所示,因无波导管备件,临时修复执飞两个航班正常,后因波导管在振动情况下裂开程度加大,导致了波导在波导管里传输时射频能量损失,出现波形失真,当损失足够大时,就会导致发射的雷达射频波能量很少,从而接收的雷达回波经过二次损失也会很弱,进而导致无雷达图像情况的出现,这也是在平时维护过程中应极力避免的,因为每次拆装波导开关都需要拆装该波导管。
三、故障原理分析747-400飞机的雷达系统是一个相对独立的系统,其输入信号有惯性基准组件IRU、大气数据计算机ADC、无线电高度表RA、EGPWS 和TCAS等,其中,左和中IRU给左雷达收发机提供稳定信号,右和中IRU给右雷达收发机提供天线稳定信号;ADC提供空速、地速和偏流角以计算风切变;RA提供高度信号以自动启动前位风切变;EGPWS、TCAS和WXR三者的警告有相互级别不同的抑制作用。
747-400飞机的雷达系统由雷达收发机、雷达控制面板、EFIS控制面板“WXR”开关、波导管、波导开关、雷达罩、天线和天线驱动组件组成。
因为本次故障现象中,左侧气象雷达使用正常,这就排除了两部雷达收发机收发回路公共部分故障的可能性了,即波导管公共部分(波导开关出来至天线部分)、天线和天线驱动组件均无故障。
驻车辅助系统故障的原因
驻车辅助系统故障的原因可能是雷达控制盒损坏。
驻车辅助系统包括测速雷达、障碍物探测雷达、自适应巡航控制雷达和防撞雷达。
测速雷达可以测量车轮的转速来测量出汽车速度。
障碍物探测雷达可在无能见度或能见度很差的情况下观察地形,向司机报警从而防止事故。
自适应巡航控制雷达能够适应车辆周围的环境,并根据本车与前车的速度与前车保持一个安全速度。
防撞雷达能根据车辆当前的方向和速度测量到在车辆前方路上可能引起碰撞的危险障碍物,适用于大气能见度低的情况以及实际判断力不理想(车距太短、速度太高)的情况,目的是警告驾驶员要打开气囊或其他制动设备,控制汽车的速度。
请注意,这只是导致驻车辅助系统故障的一个可能原因。
如果您的车辆出现此问题,建议及时联系专业维修人员进行检查和维修。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
驻车距离报警系统(PDC)的组成及原理
图 2-8 宝马E60驻车距离报警系统(PDC)的电路
驻车距离报警系统(PDC)的组成及原理 (1)超声波传感器 在前后保险杠上各这装了 4个超声波传感器 (2)PDC按钮 PDC按钮在中央控制台开关中 心上 (3)PDC控制单元 (4)中央信息显示器
图2-9 超声波传感器的安装位置 1-前保险杠上的超声波传感器 2-前保险杠上的超声波传感器
Hale Waihona Puke ★学习任务
例如: 日本马自 达公司研 制开发出 的自动控 制防追尾 系统设计 原理
图2-2超声波测距的基本原理
图2-3 激光扫描雷达
图2-4 汽车激光扫描雷达防撞系统工作流和图
图2-5 雷达对空中目标的测定
图2-6 雷达简单工作原理图
图2-7 汽车电磁波雷达防撞系统的原理图
驻车距离报警系统
雷达防撞系统故障诊断与修复
★学习任务
汽车雷达防碰撞装置,主要是解决汽车 行驶的安全距离问题。汽车行驶时超过了这个 安全距离,汽车雷达防碰撞系统立即报警以至 自动采取减速措施,使车辆处于安全状态。如 何测定汽车行驶中的安全距离,目前主要有三 种方法:
1. 超声波测距 2. 激光测距 3 . 雷达测距
2.驻车距离报警系统(PDC)的报 警方式
(2)视觉报警 绿色:距离大于100 cm。 黄色:距离在100至50 cm之间. 红色:距离小于50 cm。
2.驻车距离报警系统(PDC)的报 警方式
图2-10 宝马E60驻车距离报警系统(PDC)的显示图像 1-绿色区域2-黄色区域3-红色区域
2.驻车距离报警系统(PDC)的报 警方式
(1)声音报警 当目标距离越近,声音信号的频率就越快。 当目标距离低于25厘米时,喇叭将发出持 续的声音。 当离开目标时,声音信号立即消失。 当车辆沿着一堵墙移动时,声音信号在3秒 钟后自动关闭,以免驾驶员误解
驻车距离报警系统(Park Distance Control, 简称PDC) 在车辆驶入或驶出停车位时为驾 驶员提供帮助。
驻车距离报警系统(PDC)的组成及原理 1.驻车距离报警系统(PDC)的组成及原理 驻车距离报警系统(PDC)由8个超声波传感 器、PDC控制单元、中央信息显示器(CID) 及多音频系统控制器(用于控制喇叭)等元 件组成。