3电动机转矩转速控制机电控制工程 高钟毓.
电气工程自动化低压电器中继电器的应用 高梓毓

电气工程自动化低压电器中继电器的应用高梓毓摘要:目前我国的电气工程处在跨越式发展的阶段,科技的日益更新,让继电器这一元件在电气工程中的使用效果以及作用都在不断提高。
为了保障电气工程的质量以及其安全性,需要发现继电器中存在的优点与缺点,更好地提高继电器使用效果,让继电器能够确保电气工程在运行时电压稳定,减少突发异常电压对电气工程设备造成的损坏。
科学、合理地使用继电器,既能够充分发挥继电器本身的积极性,同时也能够延长继电器的使用寿命,对于我国国民经济以及电气工程质量而言,都有着促进的作用。
关键词:电气工程自动化;低压电器;继电器引言对于电气工程及其自动化来讲,加强低压电器中继电器的应用势在必行,其既能保证设备运行的安全性与稳定性,还能实现电气工程良性发展。
基于此,相关人员需加大低压电器中继电器的应用力度,促使其存在的实效性发挥出最大化,以期电气工程发展到新高度,为我国现代社会健康发展做铺垫。
本文主要针对电气工程及其自动化低压电器中继电器的应用为进行分析,详细如下:1继电器的相关原理实际上,继电器属于电子控制器件,其由被控制系统与控制系统两方面组成,一般运用到自动控制电路之中,其实际上是运用小电流控制大电流的自动开关。
而继电器是拥有隔离作用的自动开关,在电力电子设备、遥控、自动控制、遥测等方面应用最广泛,是十分关键的控制元件之一。
而继电器通常都具备反映输入变量的感应机构,也就是输入部分,这些变量包含光、速度、温度、电流、温度、电压、功率、频率等;还包含控制被控电路通断的执行机构,也就是输出部分;而继电器除了输出部分与输入部分,好包含耦合隔离输入量,功能处理与对输出部分展开驱动工作的中间机构,也就是驱动部分。
作为一种控制元件,总结起来,继电器有下述几点优势:(1)拓展控制范围。
比如多触点继电器控制信号到达一定值时,能够通过多种模型,实现接通、换接以及开断多路电路。
(2)放大。
比如中间继电器和灵活性继电器等等,利用非常微小的控制量,能够实现对大功率电路控制。
【报告】变速器开题报告
【关键字】报告变速器开题报告篇一:汽车变速箱设计开题报告淮阴工学院毕业设计(论文)开题报告学生姓名:专业:设计(论文)题目:指导教师:XX 年12 月17 日学号:篇二:双离合变速器开题报告山东科技大学本科毕业设计(论文)开题报告题目学院名称机械电子工程学院专业班级车辆工程XX-2学生姓名李铭学号XX01040413指导教师李学慧填表时间:XX 年4月12 日填表说明1.开题报告作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
2.此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期完成,经指导教师签署意见、相关系主任审查后生效。
3.学生应按照学校统一设计的电子文档标准格式,用A4纸打印。
4.参考文献很多于8篇,其中应有适当的外文资料(一般很多于2篇)。
5.开题报告作为毕业设计(论文)资料,与毕业设计(论文)一同存档。
篇三:汽车变速器控制技术研究开题报告黑龙江工程学院汽车工程系本科毕业设计(论文)开题报告题目名称:题目性质:学院(系):专业:年级:指导教师:学生姓名:XX 年3 月16 日一、说明选题的目的和意义,简述本题目国内外研究现状、发展趋势1、目的、意义通过对本课题的研究,能够掌握变速器的结构、原理、控制技术,针对目前汽车常用的几种变速器进行回顾,介绍其特点以及在使用中出现的问题,综合分析国内外变速器的现状和发展趋势,探索出适合现代汽车使用的变速器2、研究现状目前世界上常见的变速器主要有四种类型,机械式变速器、液控液力式变速器、电控液力式变速器和无级变速器。
机械式变速器历史悠久、价格低廉,具有结构简单、工作可靠、传动效率高的优点,所以现在在一些货车及其他车辆上仍使用很多。
而液力式变速器是目前使用最广泛的变速器,在美国采用液力变速器的轿车已达90%以上,采用液力式变速器的汽车起步平稳、自动适应行使阻力的变化、减小传动系的动载荷、驾驶操纵简单、在一定范围内进行无级变速,实现了换档自动化和半自动化。
煤矿机电设备维修和故障诊断技术

试论煤矿机电设备的维修和故障诊断技术摘要:随着科学技术与生产的发展,机械设备工作强度不断增大,生产效率、自动化程度越来越高,同时设备更加复杂,各部分的关联愈加密切,从而往往某处微小故障就爆发链锁反应,导致整个设备乃至与设备有关的环境遭受灾难性的毁坏。
这不仅会造成巨大的经济损失,而且会危及人身安全,后果极为严重。
本文对机电设备的维修和故障检测技术进行分析研究。
关键词:机电设备维修故障检测1、前言机电设备是煤炭企业固定资产中的重要组成部分,是煤炭企业不可缺少的物资基础,设备装备的先进程度和能否合理使用、科学维修和故障检测、适时检修和更新改造、使设备发挥最大的效能,对煤炭企业至关重要。
机电设备的维修和故障检测是全过程的维修和故障检测,以获得寿命周期最经济、设备综合效能最高的目标。
设备维修和故障检测实行检修、改造和更新相结合,经济维修和故障检测技术相结合。
2、机电设备的维修2.1设备维修的必要性机器设备是由各种零部件组成的,由于各种零部件材质不同。
使用的条件不同,它们的磨损和损坏的程度也不同,1台机器设备在使用过程中,由于运转造成有些零部件间的磨损,以及长时间运转造成的有些零部件疲劳和表现,使设备的性能降低,这样就必须通过维护和维修来恢复某些零部件的性能。
1台机器设备由于有形损坏的不均匀性,有些零部件已经磨损而且有些零部件还在正常工作,这样只要将损坏的易损件进行更換和修复,就可以使机器正常运转,恢复其使用性能,比购置1台相同规格的新设备既经济又节省时间。
如1台40t刮板输送机电机,有时由于使用不当造成轴承落架,只要更换轴承就可以恢复原有性能,这样比购买1台新电动机要节省时间,既经济又合理,延长了机器设备的使用寿命。
2.2设备无限循环维修带来的弊端适时的设备维修是必要的,既经济又合理。
但是无止境的长期维修下去,就不合理,也不经济了。
1台机器在长期运转使用中,由于各零部件间产生的摩擦和材质的疲劳和老化导致性能逐渐降低,这种物理变化,通常通过维修来补偿,但是维修也是有限度的,该矿在2002年有sgw-40t刮板输送机107台,配用电动机270台。
电动机转矩转速控制机电控制工程高钟毓

j dik j dij j d
ik
dt
jk
ij dt
dt
互感电动势 自感电动势 速度电动势
(反电动势)
2020年6月20日星期六
11
能量守恒方程
dWm di Tmd
旋转一周后状态复原
蜒 dW
m
di ? Tmd
0
蜒 di Tmd
2020年6月20日星期六
12
转矩与电压平衡方程
为使Tm ≠0,必须使上式中至少一个L或M 对θ的导数≠0
因此有两类电动机:
(1)L固定,M可变——固定磁阻电动机(至少两个回路)
(2)M固定,L可变——变磁阻电动机(一个回路即可)
2020年6月20日星期六
9
u1 u
u1 固定磁阻电动机
2020年6月20日星期六
变磁阻电动机
10
n
ej k 1
4
i e
2020年6月20日星期六
Ni → H → B(μH)
磁动势 磁场强度 磁通密度
→Φ
(SB)
磁通
→Ψ
( Φ N)
磁链
Ni Rm
N 2i
Rm
Li 5
i e
2020年6月20日星期六
UI 功率
UIdt 能量
Udt d
id Wm di Wm
6
i1 e1
i2 e2
1 2
Tb2
ua1
Tb3
ua2 ua3
ω03
ω ω02 ω01
ω
Td=0 Td1 Td2
ua1
ua2
ua
20
动态特性
ua
Raia
L
浅谈机电一体化专业就业前景及就业方向
浅谈机电一体化专业就业前景及就业方向论文关键词:机电一体化应用就业前景论文摘要:机电一体化是现代科学技术发展的必然结果,本文简述了机电一体化技术的大体应用,并对机电一体化专业就业前景及就业方向进行了分析。
0引言作为全国发展较为掉队的省份,到贵州主政不到一年的省委书记栗战书、省长赵克志指出,工业强省战略是贵州更好更快发展的必然选择,因此,“十二五”时期贵州将重点实施工业强省战略和城镇化带动战略。
在这样的时期背景下,作为职业院校的一名教师,深感机电一体化专业又迎来了发展的春天。
随着现代科学技术的不断发展,极大地推动了不同窗科的交叉与渗透,致使了工程领域的技术革命与改造。
在机械工程领域,由于微电子技术和计算机技术的迅速发展及其向机械工业的渗透所形成的机电一体化,使机械工业的技术结构、产品机构、功能与组成、生产方式及管理体系发生了庞大转变,使工业生产由“机械电气化”迈入了“机电一体化”为特征的发展阶段。
但机电一体化专业就业前景如何,机电一体化专业就业方向有哪些?这些问题成了很多家长和同窗们想要了解的问题。
1机电一体化技术的大体应用机电一体化是指在机构的主功能、动力功能、信息处置功能和控制功能上引进电子技术,将机械装置与电子化设计及软件结合起来所组成的系统的总称。
其大体特征可归纳为:机电一体化是从系统的观点动身,综合运用机械技术、微电子技术、自动控制技术、计算机技术、信息技术、传感测控技术、电力电子技术、接口技术、信息变换技术和软件编程技术等群体技术,按照系统功能目标和优化组织目标,合理配置与布局各功能单元,在多功能、高质量、高靠得住性、低能耗的意义上实现特定功能价值,并使整个系统最优化的系统工程技术。
由此而产生的功能系统,则成为一个机电一体化系统或机电一体化产品。
在现代机械制造业中的应用传统机械制造业是成立在规模经济的基础上,靠企业规模、生产批量、产品结构和重复性来取得竞争优势的,它强调资源的有效利用,以低本钱取得高质量和高效率,其生产盈利是靠机械取代人力,靠复杂的专业加工取代人的技术来获取的。
哈工大机电学院本科生综合课程设计2:最后附两张cad大图,一份完整的装配图

目录第一章总体方案设计 (2)1.1任务设计书及指标 (2)1.1.1设计任务书 (2)1.1.2主要技术指标 (2)1.2总体方案确定 (2)1.2.1方案确定思想 (2)1.2.2方案对比分子与确定 (3)第二章机械系统设计 (3)2.1竖直坐标工作台外形尺寸及重量估计 (5)2.2竖直导轨参数确定 (7)2.3滚珠丝杠计算和选择 (7)2.3.1 滚珠丝杠强度计算 (8)2.3.2 滚珠丝杠传动效率计算 (8)2.4伺服电机的计算与选取 (8)2.4.1 等效转动惯量的计算 (11)2.4.2 伺服电机等效负载转矩的计算 (11)2.4.3 伺服电机的选型 (12)2.5 联轴器的选用 (13)参考文献 (13)第一章 总体方案设计1.1任务设计书及指标1.1.1设计任务书题目:两维工作台(步进电机+滚珠丝杠+Y 向可加减速器方案)结构设计任务:本项目要求的两维工作台为竖直平面内的X-Y 工作台,其中Y 向为竖直,X 向为水平,电动工作方式。
1.1.2主要技术指标1)工作台台面尺寸:X 向200mm ,Y 向200mm ,台面要求沿均匀布置同心圆上分布圆间隔30mm 的M6螺孔(螺孔深度不小于15mm ),中心须有20mm 定心圆孔。
2)工作台承载:载荷重量50Kg 。
3)行程要求:X 向500mm ,Y 向1000mm 。
4)位置定位精度:X 向0.1mm ,Y 向0.05mm 。
5)最大运动精度:X 向0.1m/s ,Y 向0.2m/s 。
1.2总体方案确定根据设计任务书的要求确定总体方案。
1.2.1方案确定思想两坐标数控工作台台体设计主要分为机械系统部件和台体上的测控部件。
机械系统部件又分为导轨组成,传动组成,减速装置等;测控部件又分为伺服电机,检测及反馈元件等等。
1) 工作台型号为HXY-2020; 2) 行程要求X=200mm ,Y=200mm ;3) 工作台面尺寸为C ×B ×H=270×250×18; 4) 底座外形尺寸为C ×B ×H=1000×25×840; 5) 工作台最大长度为1000mm ; 6) 工作台负载重量为N=500N ;7) 工作台最快移动速度max max 0.2/;x y v v m s ==8)X,Y方向的定位精度为0.05mm;9)工作台负载小,运动灵敏度高,低速;10)定位精度高;11)考虑到结构稳定,安全,建议基座和滑台采用铸造工艺。
3电动机转矩转速控制机电控制工程-高钟毓解析PPT课件
.
t
24
第三节 直流电动机驱动电路
自学
2021/2/25
.
25
第四节直流电动机转矩转速控制
直流电动机转速(转矩)控制的一般形式
给定 速度
速度 控制器
电流反馈
电流 控制器
功放
M
2021/2/25
速度环
速度反馈
.
电流环
G
26
电流环
U i(s)
U a(s) K iGi (s)
1 Ra Tas 1
Ni → H → B(μH)
磁动势 磁场强度 磁通密度
→Φ
(SB)
磁通
→Ψ
( Φ N)
磁链
Ni Rm
N 2i Rm
Li
.
5
i e
2021/2/25
UI 功率
UIdt 能量
Udt d
id Wm di Wm
.
6
i1 e1
2021/2/25
i2 e2
1 L1i1 M12i2 2 L2i2 M12i1
2021/2/25
.
17
转矩平衡方程
J
d2
dt2
Ktia
Td
电压平衡方程
uaRaiaLdditaKeddt2021/2/25. Nhomakorabea18
静态特性
dia dt
0,ddt ddt22 0
uaRaiaKe
Ktia Td
ua Ke
Ra KeKt
Td
2021/2/25
.
19
ua Ke
Ra KeKt
Td
Td
机械 系统
e d dt
PLC控制步进电机进行位置控制浅析
PLC控制步进电机进行位置控制浅析作者:陈青来源:《科技资讯》 2013年第15期陈青(西北工业学校陕西兴平 713100)摘要:步进电机在开环位置控制系统中具有控制精度高、控制简单、不易失步等优点。
本文介绍了PLC对步进电机的控制方法。
关键词:PLC 步进电机位置控制中图分类号:TP273 文献标识码:A 文章编号:1672-3791(2013)05(c)-0121-02步进电动机在开环位置控制系统中因其具有控制数度高(可精确到1度以下)、可靠性高、使用方便等优点,所以应用已十分普遍。
随着电力电子技术和计算机技术的发展,可编程序控制器有了突飞猛进的发展,其功能已远远超出了逻辑控制、顺序控制的范围,它与计算机有效结合,可进行PID控制,具有远程通信通信功能等。
当前,PLC作为一种工业控制计算机来控制步进电机,具有系统构成简单,工程造价低,编程方便等优点,易于推广应用。
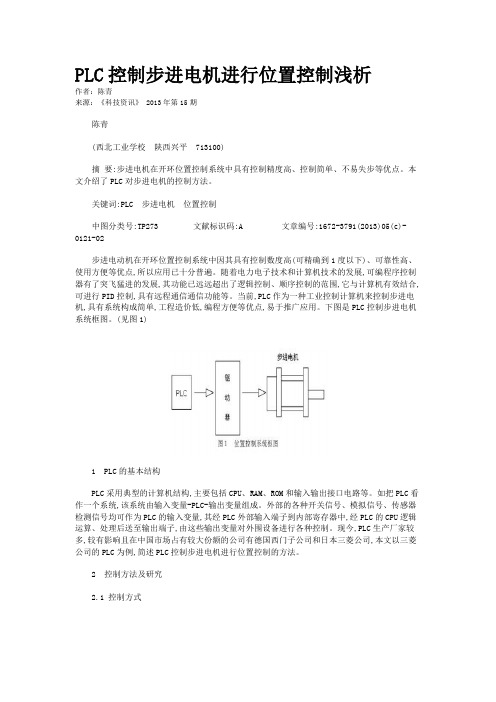
下图是PLC控制步进电机系统框图。
(见图1)1 PLC的基本结构PLC采用典型的计算机结构,主要包括CPU、RAM、ROM和输入输出接口电路等。
如把PLC看作一个系统,该系统由输入变量-PLC-输出变量组成。
外部的各种开关信号、模拟信号、传感器检测信号均可作为PLC的输入变量,其经PLC外部输入端子到内部寄存器中,经PLC的CPU逻辑运算、处理后送至输出端子,由这些输出变量对外围设备进行各种控制。
现今,PLC生产厂家较多,较有影响且在中国市场占有较大份额的公司有德国西门子公司和日本三菱公司,本文以三菱公司的PLC为例,简述PLC控制步进电机进行位置控制的方法。
2 控制方法及研究2.1 控制方式PLC控制步进驱动器进行位置控制大致有如下4种方式:通过I/O方式进行控制;通过模拟量输出进行控制;通过通信方式进行控制和通过高速脉冲方式进行控制。
当前常用的方式,就是下文所述的输出高速脉冲进行位置控制方式。
2.1.1 脉冲输出三菱FX-2N的输出端Y0,Y1可输出脉冲,脉冲频率可通过软件编程进行调节,其输出频率范围为2 Hz~20 kHz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)M固定,L可变——变磁阻电动机(一个回路即可)
2018年12月8日星期六 9
u1
u
u1
固定磁阻电动机 变磁阻电动机
2018年12月8日星期六
10
ej
k 1
n
j ik
j k
dik j di j j d dt i j dt dt
自感电动势 速度电动势 (反电动势)
i1≠0,互感项
k (i1 , i2 , Wm
k 1
2018年12月8日星期六
n
, ik 1 0,
, )dik
8
k (i1 , i2 , Wm
k 1
n
, ik 1 0,
, )dik
Wm Tm
i const
k (i1 , i2 , k 1
17
转矩平衡方程
d 2 J 2 Kt ia Td dt
电压平衡方程
dia d ua Raia L Ke dt dt
2018年12月8日星期六
18
静态特性
2 dia d d 0, 2 0 dt dt dt
ua Raia Ke
Kt ia Td
1 Ke (Ta s 1) Ra ( s) Td ( s) U a ( s) 2 TmTa s Tm s 1 Kt
Td ( s)
Ls Ra Kt I a ( s) 1 Kt Ls Ra
1 Js
( s )
Ke
2018年12月8日星期六 22
Kt ( s) JLs 2 JRa s Kt Ke
Ls Ra Td ( s) U a ( s) Kt
JRa L 令Ta ,Tm Ra K e Kt
ω
ω03
ω
ω02
ω01
0
Td=0 Td1
Td2
ua1
2018年12月8日星期六
ua2
ua
20
动态特性
dia ua Ra ia L K e dt J d K i T t a d dt
( Ls Ra ) I a ( s) U a ( s) K e ( s) Js( s) Kt I a ( s) Td ( s)
ui
Tem x
d dt
机械
系统
d e dt
2018年12月8日星期六
3
r
Td e
ω 机械 系统
电 系 统
ui
耦合
电磁场
Tem x
四端模型:电端点对选(i,ψ)
机械端点对选(Tm,θ)
独立变量对:(1)( ψ , θ ) (2)(i, θ)
Wm磁场能量
W’ m磁场同等能量
2018年12月8日星期六
互感电动势
2018年12月8日星期六
11
能量守恒方程
di Tmd dWm
旋转一周后状态复原
dW
m
di Tm d 0
di T d
m
2018年12月8日星期六 12
转矩与电压平衡方程
u j rj i j e j
d ( J ) Tm Td dt
i1
e1
i2 e2
1 L1i1 M 12i2 2 L2i2 M 12i1
磁场能量
L1i1di1 L2i2 di2 M 12i2 di1 M 12i1di2
7
2018年12月8日星期六
i1 e1
i2
e2
1 (i1 , i2 0, )di1 2 (i1 , i2 , )di2 Wm
2018年12月8日星期六
21
( Ls Ra ) I a ( s) U a ( s) K e ( s) Js( s) Kt I a ( s) Td ( s)
U a ( s)
1 Ls Ra
I a ( s)
Td ( s)
Kt
Ke
1 Js
( s )
U a ( s)
ua Ra Td K e K e Kt
2018年12月8日星期六 19
ua Ra Td K e K e Kt ua Td 0 0 Ke ua 0 Tb Kt Ra Ra tan Tb Ke Kt
Tb1 Tb2 Tb3
Tm ua1
ua3
ua2
15
Tm
0
2
线圈多到一定程度时
Tm Kt ia
2018年12月8日星期六
16
dia d eL sin dt dt
线圈多到一定程度时
dia d eL Ke dt dt
K e Kt V/rad/s N m/A
2018年12月8日星期六
2018年12月8日星期六
13
第二节 直流电动机原理和特性
工作原理
Lia cos
dia Wm
0 ia
S
ϴ
N
2018年12月8日星期六
1 2 Lia cos ia 2 Wm Tm sin ia
14
2018年12月8日星期六
机电控制工程
第三章 电动机转矩转速控制
2018年12月8日星期六
1
概述
内容
– – – – – 旋转电动机基本原理 直流电动机的原理及控制 直流无刷电动机的控制 永磁同步电动机的控制 交流感应电动机的控制
2018年12月8日星期六
2
第一节 旋转电动机基本原理
电磁场耦合模型
r 电 系 统 Td e 耦合 电磁场 ω
4
i e
Ni → H → B(μH) 磁动势 磁场强度 磁通密度
→Φ (SB) 磁通
→Ψ ( Φ N) 磁链
Ni Rm N 2i Rm
2018年12月8日星期六
Li
5
i e
UI 功率
UIdt 能量
Udt d
id W
m
di W
m
2018年12月8日星期六 6
n
, ik 1 0,
, ) dik
j M1 j i1 M 2 j i2
Байду номын сангаас
Lj i j M( j 1) j i j 1
M nj in
为使Tm ≠0,必须使上式中至少一个L或M 对θ的导数≠0
因此有两类电动机: (1)L固定,M可变——固定磁阻电动机(至少两个回路)