工业机器人视觉定位系统高精度标定研究
工业机器人视觉检测系统的现场标定技术
p i t s d t o e s t i k p r mee s a e r gse e o t e l s r t c e o r i ae b s d o i g l r v u on su e o c mp n a e l a a tr r e i r d t h a e r k r c o d n t a e n sn u a a e n t a l
完成多台机器人基础坐标 系与车身坐标 系的统一 。实验表 明: 方法操作简单 , 够获得 ± . 0 该 能 03 mm的标 定 精度。 关键词 :工业机器人 ;车身检测 ; 距离精度 ; 配准 中图分类号 :T 22 P 4 文献标识码 :B 文章编号 :10 -7 7 2 1 )2- 8 -4 0 09 8 (0 0 0 -03 0 0
( tt yL b rtr f rc inMesrn eh oo ya dIsrme t, ini nv ri , SaeKe a o aoyo eio au igT c n lg n t P s n u ns TajnU ies y t
Ta j 00 2, hn ) ini 3 0 7 C ia n
0 引 言
触 式的外部位姿标定 , 此类方法操作方便存在人 为 瞄准误差 的影响 , 难
基于通用工业机器人 的柔性 在线车身检测系统是机器 视觉在工业质量检测 领域 的重要应 用 , 实现 了对大 型工件
以保证 较高的标 定精 度 和重复 精度 。Hih R L等人 建立 m 了一种同时包含手眼关 系和机 器人外部位姿关系 的齐次变 换 矩阵方程 , 并通 过迭 代 的方 法获 得数 值解 ; 苏剑 波提
d c mp s in T e t n fr t n r m h o o a e fa st h a a r ee i e . x e me tr s l e o o i o . h r so ma i s f t a o o t e r b t s r me o t e c rf me a e d tr n d E p r n e u t b m i s s o h t h t o sp a t a t i l p r t n a d s t f co y p e iin o ±0 3 h w t a e meh d i rc il wi smpe o e ai n a i a tr r c s f t c h o s o . 0 mm. Ke r s id sra r b t a o y i s e t n;d sa c c u a y e itain y wo d : n u t l o o ;c rb d n p c i i o i n e a c r c ;rg srt t o
基于Halcon的工业机器人手眼标定方法研究
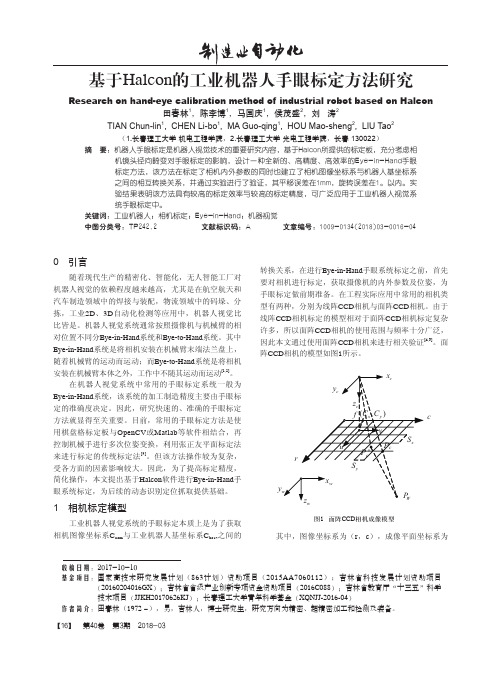
基于Halcon 的工业机器人手眼标定方法研究Research on hand-eye calibration method of industrial robot based on halcon田春林1,陈李博1,马国庆1,侯茂盛2,刘 涛2TIAN Chun-lin 1, CHEN Li-bo 1, MA Guo-qing 1, HOU Mao-sheng 2, LIU Tao 2(1.长春理工大学 机电工程学院,2.长春理工大学 光电工程学院,长春 130022)摘 要:机器人手眼标定是机器人视觉技术的重要研究内容,基于Halcon所提供的标定板,充分考虑相机镜头径向畸变对手眼标定的影响,设计一种全新的、高精度、高效率的Eye-in-Hand手眼标定方法,该方法在标定了相机内外参数的同时也建立了相机图像坐标系与机器人基坐标系之间的相互转换关系,并通过实验进行了验证,其平移误差在1mm,旋转误差在1。
以内。
实验结果表明该方法具有较高的标定效率与较高的标定精度,可广泛应用于工业机器人视觉系统手眼标定中。
关键词:工业机器人;相机标定;Eye-in-Hand;机器视觉中图分类号:TP242.2 文献标识码:A 文章编号:1009-0134(2018)03-0016-04收稿日期:2017-10-10基金项目:国家高技术研究发展计划(863计划)资助项目(2015AA7060112);吉林省科技发展计划资助项目 (20160204016GX );吉林省省级产业创新专项资金资助项目(2016C088);吉林省教育厅“十三五”科学 技术项目(JJKH20170626KJ );长春理工大学青年科学基金(XQNJJ-2016-04)作者简介:田春林(1972 -),男,吉林人,博士研究生,研究方向为精密、超精密加工和检测及装备。
0 引言随着现代生产的精密化、智能化,无人智能工厂对机器人视觉的依赖程度越来越高,尤其是在航空航天和汽车制造领域中的焊接与装配,物流领域中的码垛、分拣,工业2D 、3D 自动化检测等应用中,机器人视觉比比皆是。
工业机器人运动学标定及误差分析研究
工业机器人运动学标定及误差分析研究工业机器人是现代制造业中不可或缺的重要设备之一,它可以实现各种复杂的工业生产操作。
而工业机器人的运动学标定和误差分析则是确保机器人准确运动和定位的关键技术之一、本文将对工业机器人运动学标定及误差分析进行研究。
首先,我们需要明确工业机器人的运动学模型。
工业机器人的运动学模型是描述机器人运动学特征的数学模型,包括机器人末端执行器在空间坐标系中的位置和姿态。
机器人的运动学模型可以通过机器人臂的几何参数和关节参数进行建立。
接下来,我们需要进行工业机器人的运动学标定。
运动学标定是指通过实验测量,获得机器人运动学参数的过程。
具体步骤包括:1.确定运动学标定系统:选择适当的标定系统是进行运动学标定的首要任务。
常用的运动学标定系统包括激光测距仪、相机视觉系统等。
2.收集标定数据:通过标定系统对机器人执行器进行测量,获取机器人的位置和姿态数据。
标定数据可以通过移动机器人执行器,并记录其位置和姿态来获取。
3.进行标定参数计算:根据标定数据,通过数学运算方法计算机器人运动学参数。
计算方法可以采用最小二乘法等。
4.检验标定结果:将计算得到的运动学参数应用于机器人中,验证其是否能够准确描述机器人的运动学特性。
在进行工业机器人运动学标定的过程中,需要注意以下几点:1.标定精度要求:根据具体需求,确定工业机器人的运动学标定精度。
标定精度要求越高,则标定过程中需要收集的数据越多。
2.标定环境准备:保证标定环境的准确度和稳定性。
避免干扰因素对机器人运动学参数的影响。
3.标定数据处理:在收集标定数据后,需要对数据进行处理,去除异常值和噪声,以提高标定结果的准确性。
4.标定误差分析:对标定结果进行误差分析,评估标定精度。
常见的误差包括位置误差、姿态误差等。
1.关节间隙误差:机器人的关节存在间隙,会导致机器人运动学参数的偏差。
因此需要对机器人关节间隙进行误差分析,以减小误差对机器人定位的影响。
2.传动误差:机器人关节传动装置存在误差,如传动精度和传动回差等。
基于机器视觉的工业机器人定位系统研究

Science and Technology &Innovation ┃科技与创新2020年第14期·69·文章编号:2095-6835(2020)14-0069-02基于机器视觉的工业机器人定位系统研究曹诚诚(南京理工大学泰州科技学院,江苏泰州225300)摘要:当前工厂对智能设备的制造要求逐渐提升,同时机器视觉技术的的发展对于高精度的定位性能要求较高,并逐渐向机器人领域拓展。
基于机器视觉技术,通过概述工业机器人定位系统组成,围绕动作过程等方面探究工业机器人定位系统的具体内容,进而将定位信息向机器人控制器进行传输,完成定位任务。
关键词:机器视觉;工业机器人;定位系统;定位抓取技术中图分类号:TP242.2文献标识码:ADOI :10.15913/ki.kjycx.2020.14.025工业机器人是制造业的高端制造设备,对于稳定性、定位精准度的要求较高,因此需要借助机器视觉技术处理图像,通过工业相机实现引导定位和模式识别等操作,快速获取物体的质心和边界,满足工业机器人系统运行的自定位需求,缩短其期望位置和末端位置间的差距,进而促进机器视觉技术的创新和发展。
1定位系统组成依托机器视觉的机器人定位系统包含摄像机系统和控制系统,其中摄像机系统中包括计算机(具有图像采集卡)、摄像机,主要收集视觉图像,并应用机器视觉算法。
控制系统包含控制箱和计算机,对计算机末端具体位置完成控制。
工作区利用CCD 摄像机进行拍摄,并使用计算机识别图像,得到跟踪特征,完成数据的计算和识别,借助逆运动学方式获取机器人每一位置的误差,再对高精度末端执行模块进行控制,科学调整机器人的位置和位姿。
2工作原理机器人系统较为复杂,其中包含工业计算机、伺服电机、伺服控制器等部件,借助“人类引导思想”工艺,对人类的行为习惯、肢体动作、决策方式、表达模式进行展示和控制[1]。
依托机器视觉技术的机器人定位系统工作原理包含以下内容。
面向工业机器人的非线性手眼标定方法研究
现代电子技术Modern Electronics Technique2024年4月1日第47卷第7期Apr. 2024Vol. 47 No. 70 引 言随着我国制造强国战略逐步深化,人工智能制造[1]成为“中国制造2025”明确主攻方向,越来越多的工厂开始使用工业机器人和机器视觉实现自动化生产,使机器人能够适应更复杂的生产环境,提高生产效率。
作为实现人工智能制造和智慧城市基础[2]的手眼标定,是机器人和机器视觉进行协调工作的必要内容,通过重构三维场景获取相机坐标系和机器人坐标系之间的位姿关系,因此提升其精确度、标定范围和稳定性非常重要。
目前,标定的主要方法有主动视觉标定法、相机自标定法和传统相机标定法[3]。
主动视觉标定法优点在于不用借助标定物、稳定性强及算法简单,但成本高、设备昂贵;相机自标定法[4]灵活性强但精度低、鲁棒性差;传统相机标定法需要标定物辅助标定,但是算法足够成熟,鲁棒性强且操作简单[5⁃9]。
对于精度要求高和成本需要控制的场景,传统相机标定法能够满足要求。
其中常用的方法有直线标定法、Tsai 两步法和张氏标定法,这面向工业机器人的非线性手眼标定方法研究胡宇鹏, 蒋年德(东华理工大学 信息工程学院, 江西 南昌 330013)摘 要: 手眼标定是机器人视觉领域中的一个关键技术,主要包括眼在手上和眼在手外两种标定方式。
标定的目的是得到相机坐标系与机器人坐标系之间的位姿关系,根据相机获取的图像重构三维场景,求出两个坐标系之间的转换参数,其结果将直接影响到机器人精准作业。
受当前镜头工艺水平和机器误差限制,相机采集的图像存在非线性畸变,原有的手眼标定方法存在精确度不足的缺点。
针对这个问题,文中提出面向工业机器人的非线性手眼标定方法,通过卷积原理使矩阵参数适应镜头下不同区域畸变的方法,减小相机镜头畸变影响。
通过实验验证表明,该方法能够提高手眼标定结果的精确度,标定后的平均误差为0.4 mm ,稳定性更强,可满足更多场景需求。
简述工业机器人工件坐标的标定方法以及工件坐标系的作用(一)
简述工业机器人工件坐标的标定方法以及工件坐标系的作用(一)工业机器人工件坐标的标定方法及作用1. 背景介绍•工业机器人在自动化生产中的应用越来越广泛,能够完成大量的重复性工作。
•工业机器人的精度对于生产效率和产品质量起着至关重要的作用。
•工件坐标的准确标定以及正确的工件坐标系的建立是保证机器人操作精度的关键。
2. 工件坐标的标定方法•影像测量法:使用相机或激光等设备对工件进行测量,获取工件的几何特征,从而确定其坐标。
•机械测量法:使用传感器或编码器等设备对工件进行测量,测得工件的位置和方向,进而确定其坐标。
•标定板法:在已知坐标系下放置标定板,通过机器人操作的手段,获取标定板上的特征点坐标,从而计算出机器人坐标系与实际工件坐标系之间的转换关系。
3. 工件坐标系的作用•精确定位:工件坐标系确定了机器人操作的参考坐标系,可以精确地获取工件的位置和姿态信息。
•路径规划:工件坐标系确定了工件的基准坐标系,可以在该坐标系下进行路径规划,保证机器人操作的准确性。
•错误补偿:工件坐标系的准确定位可以对机器人操作中的误差进行补偿,从而提高机器人操作的精度和稳定性。
•数据传递:工件坐标系可以作为工件信息的载体,将工件的位置和姿态信息传递给其他设备,实现系统之间的信息交互。
4. 结语工业机器人工件坐标的准确标定以及正确的工件坐标系的建立是保证机器人操作精度的关键。
使用影像测量法、机械测量法或标定板法可以得到工件坐标的准确值。
工件坐标系的确定对于精确定位、路径规划、错误补偿和数据传递等方面都具有重要作用,使机器人操作更加精确、稳定和高效。
5. 影像测量法•影像测量法是一种非接触式的测量方法,通过摄像头或激光扫描仪等设备对工件进行扫描,并利用图像处理算法来提取工件的特征点。
•通过对特征点的坐标测量和计算,可以确定工件的位置和姿态,从而建立工件坐标系。
•影像测量法具有测量快速、精度高和适用于各种形状的工件等优点,广泛应用于汽车制造、航空航天等行业。
工业机器人视觉系统的标定方法
工业机器人视觉系统的标定方法在现代工业自动化领域中,工业机器人扮演着至关重要的角色。
这些机器人能够执行一系列复杂的任务,从简单的装配工作到高度精密的制造流程。
而机器人视觉系统,作为工业机器人的“眼睛”,则赋予了机器人感知和理解周围环境的能力。
为了确保机器人视觉系统的准确性和可靠性,必须对其进行精确的标定。
本文将详细探讨工业机器人视觉系统的标定方法,包括其重要性、常见方法以及未来的发展趋势。
一、工业机器人视觉系统标定的重要性工业机器人视觉系统的标定是一个涉及多个步骤的复杂过程,其目标是通过一系列算法和技术手段,确定摄像机内外部参数,以及摄像机与机器人坐标系之间的相对位置关系。
这些参数包括摄像机的焦距、畸变系数、旋转矩阵和平移向量等。
只有经过准确的标定,机器人视觉系统才能精确地识别和定位目标物体,从而实现高效的自动化生产。
标定过程对于提高机器人视觉系统的性能至关重要。
一方面,准确的标定可以显著提高视觉系统的定位精度和稳定性,从而降低生产过程中的误差率。
另一方面,标定过程还有助于优化机器人的运动轨迹和路径规划,提高生产效率。
因此,掌握有效的标定方法对于实现工业自动化生产具有重要意义。
二、工业机器人视觉系统标定的常见方法1. 传统标定方法传统标定方法主要依赖于特定的标定参照物,如标定板、标定块等。
这些参照物具有已知且精确的几何特征,可用于估计摄像机的内外部参数。
传统标定方法的优点在于标定精度高、稳定性好,适用于对精度要求较高的场合。
然而,这种方法也存在一些局限性,如标定过程繁琐、需要专业操作人员以及对标定参照物的依赖性较强等。
2. 自标定方法自标定方法是一种不需要特定标定参照物的标定方法。
它利用摄像机在运动过程中拍摄到的多幅图像之间的对应关系,通过求解一系列方程组来估计摄像机的内外部参数。
自标定方法的优点在于灵活性高、适用范围广,可以应用于各种复杂的场景中。
然而,由于自标定方法依赖于图像之间的对应关系,因此其标定精度相对较低,且容易受到噪声和光照变化等因素的影响。
基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的开题报告
基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的开题报告一、研究背景在工业生产中,机器人已经成为一种不可缺少的设备。
机器人的精度与稳定性对生产效率与品质有着非常重要的影响。
然而,在生产现场中,受到环境、操作与机器自身的因素,机器人的位姿误差常常不可避免。
如果不进行修正,这种位姿误差就会对产品的质量产生影响,甚至导致生产线停产,增加生产成本。
基于机器视觉的工业机器人位姿误差的标定与补偿方法就是一种有效纠正机器人位姿误差的方法。
它可以通过对机器人的视野范围内的参考物体进行图像处理与分析,来实现机器人位姿的标定与补偿。
目前,国内外已经有很多研究者对基于机器视觉的机器人位姿误差的标定与补偿方法进行了研究。
但是由于生产环境的多样性与机器人自身的特性不同,现有方法在实际应用中还存在不足,需要进一步研究优化。
二、研究目标本研究的主要目标是开发一种基于机器视觉的工业机器人位姿误差的标定与补偿方法,并设计相应的算法实现。
通过实验验证,来分析该方法的准确性与可行性,并与现有方法进行比较,为工业生产提供更加精确与稳定的机器人位姿纠正方案。
三、研究内容1. 研究机器人位姿误差的标定方法,包括标定板的设计与制作、标定点的选择及标定参数的计算等。
2. 研究机器视觉技术的应用方法,包括相机的参数标定、三维重建与姿态估计等技术。
3. 设计基于机器视觉的机器人位姿误差补偿算法,包括根据视觉信息判断机器人姿态、计算补偿量以及控制机器人执行补偿等步骤。
4. 进行实验验证,通过对标定板的拍摄与分析来计算机器人的姿态误差,并通过实验数据来验证算法的准确性与可行性。
四、研究意义通过本研究,可以发现与改进现有机器人位姿误差标定与补偿方法的不足,使之更加适用于实际生产环境中,提供更加精确、可靠的机器人位姿修正方案。
在实际生产过程中,可以提高生产效率和产品质量,节约生产成本,增强企业的竞争力。
同时,该方法的研究还可以推动机器视觉技术在工业自动化生产中的应用,拓展机器人技术的研究领域。
工业机器人的精准定位与高精度加工技术
工业机器人的精准定位与高精度加工技术工业机器人一直以来都是现代制造业中不可或缺的重要工具。
随着科技的发展,工业机器人的功能和性能不断提升,特别是在精准定位和高精度加工方面取得了显著的进展。
本文将探讨工业机器人的精准定位技术和高精度加工技术,并探讨其在实际应用中的优势和挑战。
一、工业机器人的精准定位技术精准定位是工业机器人实现精确操作的基础。
在工业生产中,机器人需要准确地识别和追踪工件的位置,以便进行合适的操作。
以下是几种常见的工业机器人精准定位技术:1. 视觉定位技术视觉定位技术利用相机和图像处理算法,对工件进行图像识别和测量,从而确定其位置和姿态。
通过分析工件的特征、形状和颜色等信息,机器人可以精准地定位和对齐工件,实现高精度操作。
视觉定位技术广泛应用于焊接、装配和喷涂等工业领域。
2. 激光测距技术激光测距技术利用激光传感器测量工件与机器人之间的距离和位置。
激光传感器可以发射激光束,并通过接收激光的反射信号来计算距离。
激光测距技术具有高精度和快速响应的特点,常用于工件定位和测量。
3. RFID技术RFID(无线射频识别)技术利用射频信号实现对工件的追踪和定位。
每个工件都附带有RFID标签,机器人通过读取标签中的唯一识别码,可以准确地知道工件的位置和属性。
RFID技术适用于物流管理和仓库自动化等领域。
二、工业机器人的高精度加工技术高精度加工是工业机器人在制造过程中的重要应用之一。
随着制造业对产品精度和质量要求的提升,工业机器人在高精度加工方面扮演着越来越重要的角色。
以下是几种常见的工业机器人高精度加工技术:1. 精密传感技术精密传感技术能够实时监测机器人和工件的状态,在加工过程中进行反馈控制。
通过使用高精度传感器和控制算法,机器人可以实现对工具和工件的精确控制,以达到高精度的加工要求。
2. 轨迹规划和插补技术轨迹规划和插补技术是工业机器人实现高精度加工的关键。
通过使用数学模型和算法,机器人可以根据工艺要求和工件形状,生成合适的轨迹和插补路径。
工业机器人视觉系统的摄像机标定
其中: 厂为摄像 机 的焦距 , , 一z 。 。
1 1 2
2
墨
/ /
盯
图 l 小 孔 成 像 原 理 图
’ 。
1 . 2 摄 像机 的 内参数模 型
图像点 与景物点 之 间的位 置关 系模型就 是摄像机 的内参数 模 型 。这样 成 像 点 ( , Y ) 就 转 变成 了图像 点( “ , ) 。记 ( ‰, 。 ) 为光 轴 与 成 像平 面 的交 点 坐标 ,
l
0 0
1 O ● R _ ● . ● . O ● , 。 L ● 0 ● ● j O
实 验 基 于 Re i n v o 公 司 的 6 自 由 度 教 学 用 工 业 机
器人 , 因 为视 场有 限 , 可 以忽 略 镜 头的 畸 变 . 采 用 线性
一
式:
f = = i 荨 ] F - r , / z , . 7 j 。 … … … … … … c e §
一
1 l o‰ o ] l 0 走 2 0 0 l l J 1 l 0 0 】 0 J
一
q1 q!
"
工 业机 器 人视 觉 系统 的摄 像 机标 定
段 坚 ,张 少鹏 ,王现 康
( 华 北 电力 大 学 机 械 工 程 系 ,河 北 保 定 0 7 1 0 0 3 )
摘 要 :摄 像 机 标 定 是 计 算 机 视 觉 处 理技 术 中 的 一个 重 要 组 成 部 分 ,在 机器 入 导航 、足 球 机 器 人 、三 维 重 建 等
U
” 0 3 f J 0 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2) 第二步求取转换矩阵是先求此矩阵的旋转分 量再利用旋转分量求取平移分量 ,显然这也会有误 差累积.
综合考虑 , 我们在传统的两步法标定基础上提 出了改进的两步标定法 ,针对以上两点不足分别做 了以下改进 :
1) 标定摄像机时充分考虑了镜头的径向畸变 、 切向畸变和镜面中心偏移 ,以尽量减小第一步时的 误差.
]-
1
·H
( j) gb
Dij
=
[
H
( i) tc
]-
1
·H
( j) tc
(3)
则式 (3) 可写为 :
CijHtg = HtgDij
(4)
同理可得 :
Eij Hcb = Hcb Fij
(5)
其中 :
Eij
=
H
( i) gb
·[
H
( j) gb
]- 1
© 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved.
B=
(7)
01
其中 Ra 、Rb 、Rx 均为 3 ×3 的旋转变换矩阵 , Ta 、Tb 、Tx 为 3 ×1 的向量. 代入方程得 :
Ra Rx = Rx Rb
(8)
( Ra - I ) Tx = Rx Tb - Ta
(9)
则求解方程 AX = XB 转化为求解方程 (8) 、(9) .
2. 2. 1 求解方程 Ra Rx = Rx Rb
(11)
2. 3. 1 优化数学模型
0 - Vz Vy
由方程式 (1) 得 :
skew ( V) = Vz
0 Vx
H(gbi) Htg
=
Hcb
H
( i) tc
(13)
定义以下符号 :
- Vy - Vx 0
P′r =
1 θ
Pr =
2cos 2
1 4 - | Pr | 2
(12)
计算步骤如下 :
①计算 PRa 、PRb
任何一个旋转变换都可以看作绕空间的某个过
原点的单位轴旋转某个角度而成 ,即 :
Rx Tx X=
01
n21 + (1 - n21) cosθ
n1 n2 (1 - cosθ) - n3sinθ n1 n3 (1 - cosθ) + n2sinθ
R = n1 n2 (1 - cosθ) + n3sinθ
n22 + (1 - n22) cosθ
(1. Institute of Electrical Automation , Zhejiang University , Hangzhou \ 310027 , China ; 2. National Laboratory of Industrial Control Technology , Zhejiang University , Hangzhou 310027 , China)
第 26 卷第 2 期 2004 年 3 月
机器人 ROBOT
Vol. 26 , No. 2 March ,2004
文章编号 : 100220446 (2004) 0220139206
工业机器人视觉定位系统高精度标定研究 Ξ
毛剑飞1 ,2 , 诸 静1
(1. 浙江大学电气自动化研究所 , 浙江 杭州 310027 ; 2. 浙江大学工业控制技术国家重点实验室 , 浙江 杭州 310027)
角度 ,定义 Pr = 2sin (θ/ 2) [ n1 n2 n3 ] T. 这样 Pr 与 R
有一一对应的关系 ,即求解 R 相当于求解 Pr ,有 :
R
= [1 -
|
Pr 2
|
2
]
I
+
1 2
( PrPrT
+
4 - | Pr | 2 skew ( Pr) )
进了原方法 ,即首先利用原方法求出初值 ,再根据方 程式 (1) 建立优化数学模型 ,利用高斯 —牛顿法迭代 求精 Hcb和 Htg ,应用该方法推导出了雅可比阵的计 算公式.
第 26 卷第 2 期
毛剑飞等 : 工业机器人视觉定位系统高精度标定研究
141
Fij
=
H
( i) tc
·[
H (tcj)
]- 1
(6)
解方程(5) 可求出 Hcb ,这相当于解 AX = XB 一类方程.
2. 2 求解方程 AX Leabharlann XBA 、B 、X 写为 :
A = Ra Ta 01
Rb Tb
关键词 : 机器人视觉标定 ; 两步标定法 ; 优化数学模型 ; 高斯 —牛顿法 中图分类号 : TP24 文献标识码 : B
Study on High Accurate Calibration of Industrial Robot Vision Positioning System
MAO Jian2fei1 ,2 , ZHU Jing1
n2 n3 (1 - cosθ) - n1sinθ
(10)
n1 n3 (1 - cosθ) - n2sinθ n2 n3 (1 - cosθ) + n1sinθ
n23 + (1 - n23) cosθ
其中[ n1 n2 n3 ]为过原点的单位轴 ,θ为旋转的
在较大的累积误差. 为了彻底消除累积误差 ,我们改
参见文献[5 ] ,由 Ra 、Rb 求得相应的 PRa 、PRb. ②计算 P′Rx .
摘 要 : 分析了机器人视觉的主要标定方法 ,并在此基础上改进了传统的两步标定法. 该方法先用两步法求出 转换矩阵的初值再建立优化数学模型 ,优化计算采用快速的高斯 —牛顿法. 该方法不仅具有原来两步法的诸多优 点 ,如自动 、快速 ,而且彻底消除了第二步存在的累积误差 ,大大提高了标定精度. 大量试验表明 ,标定精度明显优于 传统的两步法.
Abstract : The traditional two2stage calibration technique is improved based on the analysis of the principal calibration methods of robot vision. The technique firstly makes use of two2stage method to solve the initial value of the transition matrix , then establishes the optimization mathematical model , and Gauss2Newton method is used in the optimization computation. The proposed technique not only possesses as many virtues as the traditional two2stage method , for example , automationc , high speed , but also completely eliminates the accumulative error existing in the second stage of the traditional method and improves the calibration accuracy grea2t ly. Many experiments indicate that the proposed technique excels the traditional two2stage method distinctly. Keywords : robot vision calibration ; two2stage calibration method ; optimization mathematical model ; Gauss2Newton method
g : 抓手坐标系 t : 平面模板坐标系 b : 机器人基坐标系 c : 摄像机坐标系
图 1 机器人人 —眼系统标定试验方案 Fig. 1 The calibration experiment scheme of the robot/ eye system
图 2 机器人人2眼系统标定示意图 Fig. 2 The sketch diagram of the calibration of
有关第 一 步 的 摄 像 机 高 精 度 标 定 已 有 研 究 报 告. 试验结果表明 ,标定结果要优于用张正友的平面 模板标定法[4] 得出的结果. 现主要介绍有关转换矩 阵的标定. 以人 —眼系统[3]为例标定方法介绍如下. 2. 1 机器人人 —眼系统标定说明
设计的人 —眼系统的标定方案如图 1 所示 ,标 定模板固定在抓手上 ,摄像机安装在云台上监视工 作区间. 图 2 为机器人人 —眼系统标定示意图. 图 2 的各坐标系及转换矩阵说明如下.
1 引言( Introduction)
机器人视觉标定是机器人离线编程的基础 ,视 觉的高精度标定能充分利用视觉 ,引导机器人按照 我们事先编好的程序完成各种任务. 国外关于机器 人视觉标定做了大量的研究 ,并提出了一系列切实 可行的标定方法[1~3] ,而国内关于此方面的研究报 导却很少见到.
目前机器人视觉标定的主要方法有 Lenz 和 Tsai 提出的两步法[1]及 Zhuang 提出的一步法[2] ,两种方 法各有其优缺点.
Ξ 基金项目 :国家自然科学基金资助项目 (69904009) . 收稿日期 :2003 - 09 - 23
© 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved.