一种改进的均值滤波算法
一种新的背景减运动目标检测方法

天键 : 字视 频分析 ; 动 目标检测 ; 数 运 背景建模 ; 亮度 归一化; 维 交叉熵 二
S h o fIfr t n S ine a d T cn l y B in oet iesy B in 0 0 3C ia c o lo nomai cec n eh oo , e ig F rsy Unvri , e ig 1 0 8 , hn o g j r t j
L U We p n 。 . vn b e t d tcin meh d b s d o a k r u d s b r cin C mp t r E gn ei g a d Ap I n i g HE NaMo i g o j c ee t t o a e n b c g o n u t a t . o ue n ie r n - o o n pi t n .0 14 ( 2 :7 —7 . l a i s 2 1 . 7 2 ) 1 51 9 c o
ie . e b c go n i ntaie y n i r v d me n il r g m eh d, ̄ ih c n g ta s t fig a k ru d ma e v n z dTh a k r u d s i l d b a mpo e a f t i to  ̄hc a e ai y n b c go n i g e e i i z en s
i a be tap as h ak ru d i u d td a tmai l .h vn bet ae d tc d b s g a dpie trsod f n ojc p er. e b cgo n s p a uo t al T emo ig o jcs r e t y ui n aa t heh l T e c y ee n v
均值滤波 原理

均值滤波原理均值滤波器是一种常用的图像处理技术,通过对图像中像素的邻域进行计算,然后用计算得到的平均值来代替原图像中的像素值,从而达到平滑图像的效果。
均值滤波器的原理是基于图像中局部区域像素的相似性。
通过计算像素邻域的灰度平均值来替代原像素值,以减弱图像中的噪声。
在均值滤波中,每个像素的新值是其周围像素的平均值。
这样,较突出的细节将被平滑处理,使图像变得更加柔和。
均值滤波器使用的是一个均值模板,模板的大小可以根据需要进行调整。
常见的均值滤波器模板有3x3、5x5、7x7等,该模板在图像中滑动,对每个模板的像素进行计算和处理。
对于中心像素,统计其附近像素的平均灰度值,并将该平均灰度值赋给中心像素。
均值滤波器的处理过程可以简单地理解为将一个模板覆盖在图像上,模板中的每个像素对应着图像中的一个像素。
然后,对应位置的像素值进行求和,并除以模板中像素的总数,得到平均值。
将计算得到的平均值作为对应位置的像素值。
均值滤波器的优点是简单易实现,计算速度快。
然而,均值滤波器也存在一些缺点。
首先,均值滤波器会平滑图像中的边缘信息,导致图像的细节丢失。
其次,均值滤波器对于椒盐噪声等离群点的处理效果不佳,容易出现图像中个别像素值异常的情况。
为了解决这些问题,可以采用改进的均值滤波算法。
其中一个常用的改进算法是自适应均值滤波器。
该算法在计算像素平均值时加入了动态的权重调整,根据像素间的灰度差异决定采用不同的权重。
这样可以更好地保留图像的边缘信息,并有效抑制噪声。
另一个改进算法是中值滤波器。
中值滤波器在模板中求取像素值的中值作为对应像素的值。
不像均值滤波器对像素值进行求和取平均,中值滤波器通过选择中间值来平滑图像,因此可以更好地保留图像细节。
尤其对于存在椒盐噪声的图像,中值滤波器表现良好。
总之,均值滤波器是一种有效的图像处理技术,它通过计算像素周围邻域的平均值,将该平均值代替原像素值,从而平滑图像。
虽然均值滤波器处理简单,但容易丢失图像中的细节和边缘信息。
中值和均值滤波算法
中值和均值滤波算法中值滤波和均值滤波是常用的图像处理算法,用于降低图像噪声的影响。
它们都属于非线性滤波算法,即输出像素值不仅取决于输入像素值,还取决于输入像素值周围的像素值。
中值滤波算法通过将像素值排序并选择中间值作为输出值来实现图像平滑。
具体步骤如下:1.对于图像中的每个像素点,确定一个窗口大小,该窗口覆盖了该像素点及其邻域像素点。
2.将这些像素值排序,并选择排序后的中间值作为输出像素值。
3.重复上述步骤,直到对所有像素点进行操作。
中值滤波算法的优点是可以有效地去除椒盐噪声等脉冲噪声,但会对图像的细节进行模糊处理,从而使图像失去一些细节信息。
均值滤波算法则是将窗口内所有像素值的平均值作为输出像素值。
具体步骤如下:1.对于图像中的每个像素点,确定一个窗口大小。
2.将窗口内所有像素值求和,并除以窗口中像素点的数量,得到均值作为输出像素值。
3.重复上述步骤,直到对所有像素点进行操作。
均值滤波算法的优点是能够在平滑图像的同时保留图像的细节信息,但对于噪声的去除效果相对较差。
在中值滤波和均值滤波算法中,窗口大小是一个重要的参数。
较小的窗口大小可较好地保留图像的细节信息,但噪声去除效果相对较差;而较大的窗口大小可以更好地去除噪声,但会导致图像模糊。
中值滤波和均值滤波算法都有一些改进方法。
例如,自适应中值滤波算法可以根据像素值的分布动态调整窗口大小,从而更好地去除噪声。
另外,加权平均滤波算法可以根据像素点的重要性赋予不同的权重,从而更好地平衡去噪和保留细节的效果。
总之,中值滤波和均值滤波是两种常用的图像处理算法,可以有效地去除噪声,平滑图像。
选择哪种算法取决于具体的应用场景和需求。
一种有效去除椒盐噪声的滤波算法

收稿日期22 修改日期22作者简介武英,女,南京晓庄学院物理与电子工程学院讲师,硕士,研究方向影像处理2008年11月第6期南京晓庄学院学报JOURNAL OF NANJ I NG X I A OZ HUANG U N I V ERS ITY Nov .2008No .6一种有效去除椒盐噪声的滤波算法武 英(南京晓庄学院物理与电子工程学院,江苏南京210017)摘 要:文章在已有极值中值滤波算法的基础上,提出一种改进的滤波算法.该算法对于不同密度的椒盐噪声采用了不同的滤波方法.在噪声密度较低时,采用有效信号的均值滤波;在噪声密度较大时,采用递归方式进行滤波.经过大量实验证明,该算法在滤除椒盐噪声能力和细节保护能力方面均有较大提高.关键词:椒盐噪声;极值检测;均值滤波;递归中图分类号:O422 文献标识码:A 文章编号:100927902(2008)06200622040 引言图像在传输和形成过程中会由于噪声的产生而导致图像质量下降,而由于成像中的短暂停留或开关作用而形成的椒盐噪声是导致图像质量下降的主要因素之一.20世纪70年代Tukey 提出的基于排序统计的中值滤波,是当前使用最广泛的非线性抑制噪声的方法之一,然而,中值滤波器的去噪效果依赖于滤波窗口的大小及参与中值计算的像素点数目,不同大小的滤波窗口对输出图像的质量有很大的影响,窗口过小,去除噪声的能力不好,窗口过大,又会损失大量的细节信息,造成图像的模糊.为了克服这些矛盾,出现了多种基于中值滤波的改进算法,如自适应中值滤波(Adaptive median filter,A MF )[1],开关中值滤波(S witch median filter,S W F )[2],极值中值滤波(Extr e m um median filter,E MF )[3],加权中值滤波(W eighted median filter,WMF ).这些算法在改善中值滤波器的性能方面做了重要的贡献,但在实际应用中都有各自的局限性,如S W F 在噪声密度低时效果较好,其性能随着输入图像信噪比的降低接近于标准中值滤波,E MF 虽然在一定程度上可以减少误差的累计传播,但随着噪声密度的增加,滤波性能也会迅速下降,WMF 通过加权,虽然降低了细节的损失,但同时去噪声性能也下降了.相比之下,A MF 具有较为优秀的滤波性能,但随着噪声密度的增加,保护细节的能力下降较快.因此,本文提出一种基于极值中值滤波算法的改进算法,该算法由噪声检测和噪声滤除两个部分组成.通过实验表明,该算法在一定程度上缓解了降噪和保护图像细节之间的矛盾.1 噪声检测椒盐噪声的PDF 可由以下公式描述:p (z )=P az =a p bz =b0其他(1)与图像信号的强度相比,椒盐干扰通常较大,因此在一幅图像中,椒盐噪声可以数字化为图像灰度值的最大最小值,负椒盐噪声以一黑点出现,正椒盐噪声以白点出现在图像中,若一幅图像的噪声密度为30%,则该图像中有15%的像素受负椒盐噪声影响,15%的像素受正椒盐噪声影响,而其余70%的像素的灰度值和原图像一致.[4]:20080720:20080910::.自然图像中,相邻像素之间存在着较大的相关性,某点的灰度值与其周围点的灰度值非常接近,除了孤立点(一般认为是噪声)外,即使在边缘部分也满足.在一幅图像中,如果一个像素点的值和其邻域的值相差很远,那么,该点很有可能就是被噪声点污染了,否则,如果其值与邻点很接近,就应该是一个有效的信号点.而滤波窗口尺寸的选择对噪声检测的准确性有很大影响,小尺寸的滤波窗口虽然对细节保护较好,但滤除噪声的能力较差,而大尺寸窗口则相反,滤除噪声能力较强,但同时易造成图像细节的模糊和扭曲.在噪声检测阶段,主要目的是尽可能准确的检测出噪声点,所以可以采用较大的检测窗口(如7×7或5×5).经过大量实验,当噪声密度达到90%时,采用7×7的检测窗口就足够了.利用参考文献[3]提出的极值检测.设f是被噪声污染的图像,其在位置(i,j)处的像素灰度值为f(i,j).令w[fij]表示以像素f(i,j)为中心的噪声检测窗口区域,找出其中的极大值和极小值,该方法的噪声检测过程为:f(i,j)∈n f(i,j)=m in(w[f ij])or m ax(w[f ij])s m in(w[fij])<f(i,j)<m ax(w[fij])(2)其中,n表示噪声,s表示信号.2 噪声滤波在噪声检测阶段采用7×7的大窗口进行极值检测,生成一个和原图像大小相同的二值噪声标记矩阵,可用1表示噪声,0表示信号.完成噪声检测后,在噪声滤除阶段,只需对标记为噪声的像素进行滤波处理,而信号点保持原灰度值不变,此时在小窗口内首先对滤波窗口内的椒盐噪声密度进行估计,如果噪声密度较低,采用改进的均值滤波方法,当滤波窗口内椒盐噪声密度很高时,采用递归方式以实现对高密度椒盐噪声的有效去除.该滤波方法的具体执行过程如下:设被噪声污染的图像f经过滤波后的输出图像为g,用噪声检测窗口(7×7)对污染图像进行极值检测,生成二值噪声标记矩阵,其中0为信号,1为可能的噪声,在接下来的噪声滤除阶段(滤波窗口3×3),只对噪声标记矩阵中的噪声点进行滤波处理,信号点的灰度值保持不变.如果某一点为噪声点,以该点为中心选择大小为3×3的滤波窗口,根据噪声标记矩阵,如果在滤波窗口内有信号点存在,则找出其中的信号点,用滤波窗口内信号点的均值取代原噪声点的灰度值.如果该滤波窗口内全部为噪声点(即噪声密度较大),取该中心像素周围已经进行噪声滤波的四个点的均值进行递归均值计算[5].即g(i,j)=[^g(i-1,j-1)+^g(i-1,j)+^g(i-1,j+1)+^g(i,j-1)]/4(3)对于图像的边界点,需要进行边界扩展,四个边界外扩一行一列,可满足滤波窗口为3×3,本文在处理中,采用了对称扩展,这样扩展能使边界的滤波效果较好.3 实验结果分析(标准中值、极值中值、自适应、本文结果分析)在仿真实验中,采用大小为256×256×8bit的标准测试图像lena为例来验证本文的滤波效果,实验时,在原始图像中加入密度不同的椒盐噪声,并对本文的理论基础极值中值和效果较好的自适应中值滤波及本文提出的方法进行了滤波效果比较.对于图像的滤波效果的评价采用主观和客观评价两种标准.客观标准采用PS NR(peak signal to noise rati o)峰值信噪比和MAE(m ean absolute err or)平均绝对值差来衡量滤波质量数值指标.其定义如下:MSE=1M×N∑Mi=1∑Nj=1[fy(i,j)-g(i,j)]2(4) PS NR=10lg2552MSE(5)MA E=1M×N∑Mi=1∑Nj=1|fy(i,j)-g(i,j)|(6)其中fy(i,j)为原始图像的像素值,g(i,j)为滤波后输出图像的像素值.这些指标的比较如表1所示,从该表中可以看出在图像中加入不同密度的噪声,本文的方法均能达到比较好的滤波效果.表1 各种算法输出结果的客观评价滤波方法性能指标椒盐噪声密度30%50%70%80%极值中值(5×5)PS NR 30.228224.347414.686610.6911MAE 2.34815.056418.541239.5923本文提出方法PS NR 32.286528.288325.845023.5598MAE 1.55343.88375.85927.6694自适应中值(最大窗口为7)PS NR 29.129626.373019.854415.0803MAE 2.84534.51349.850119.1558标准中值(5×5)PS NR 24.308720.775413.53539.9095MAE7.214010.235225.850848.8283图1 不同滤波方法的性能比较图 不同滤波方法对加入椒盐噪声的L 图像滤波效果比较 对于主观评价标准,可由图2的图像比较看出,本文的方法在噪声密度达到70%时,滤波图像的视觉效果明显好于其他方法.由图2可以看出,5×5的标准中值滤波在此时滤波效果很差,极值中值的滤波效果虽然好于标准中值,但仍有部分噪声点没有去除,自适应中值滤波将绝大部分的噪声点都滤除掉了,但同时也带来了一定程度的细节模糊.滤除噪声和保护细节是一对不可调和的矛盾,当对受到较高密度噪声污染的图像进行滤波时,必然会造成图像细节的损失,只不过本文的方法图像细节损失相对较小而已.由图2的比较结果可知,本2en a文的方法在噪声密度达到70%时,不仅可以滤除所有噪声,而且对于细节和边缘的保护能力也明显好于自适应中值滤波.通过主观和客观两个方面的滤波性能效果比较,本文的方法可以达到较好的滤波效果.4 结论本文首先分析了几种经典改进中值滤波算法,如极值中值、自适应中值等,在已有极值中值的滤波算法的基础上,提出一种改进滤波算法.本方法的改进在于首先不需要选择和图像本身特性紧密相关的阈值,避免造成误差,其次采用较大的窗口进行噪声检测,提高了噪声检测的准确性,第三能针对不同密度噪声采取不同的处理方法,提高滤波能力.在噪声密度较低时,进行改进的均值滤波,在噪声密度较高时,采用递归方式进行滤波.一方面可以保护细节,同时由于滤波窗口较小,计算量相对较小可以减少运算时间.通过从主客观两个方面对实验结果进行分析,本文提出的方法对椒盐噪声的滤波能力优于经典中值及改进算法.参考文献:[1]H wang H,Haddad R A.A Adap tive m edian filt e rs:New a l gorith m s and results[J].I EEE Transaction on I mage Proce ssi ng,1995,4(4):4992502.[2]Wang Z,ZhangD,Progressive s witching median filter for the re moval of i mpuls e nois e fr o m hig hly corrupted i mages,I EEE Trans.OnCircuits and Syste m s2II:Ana l og and Digital Signal Processi ng,1999,CAS2II,46(1):78280.[3]XI NG Z J,WANG S J,DE NG H J,et a l.A ne w filte ring algorith m ba s ed on extre m u m and median value[J].Journal of I mageand Graphics(中国图像图形学报),2001,6(6):5332536.[4]G onzalez R C,Wo ods R E.Digital I m ag e P rocessing[M].Be iji ng:Publishing House of Elec tronic s Indu stry,2003.[5]S ONG Y,L IM T,S U N L N.I m age Salt&Pepper Noise Se l f2adaptive Suppression A l gorit hn Ba s ed on Si m ilarit y Func ti on[J].ACT AAUT O MATI C SI N I C A,2007,23(5):4742478.[6]朱磊,徐佩霞.一种稳健快速的椒盐噪声抑制算法[J].小型微型计算机系统,2007,4(28):6922696.[7]王建勇,周晓光,廖启征.基于2级检测的脉冲噪声滤除算法[J].北京邮电大学学报,2005,28(3):59261.(责任编辑:王海军)An Effecti ve Sa lt2and2Pepper No ise F ilterWU Ying(School of Physi c s and El ec tronic Engineering,Nanjing Xi aozhuangUnive rsity,N anjing210017,China)Abstrac t:B ased on the extre m e median filter,an i m p r oved i m age filte r algorithm is pr oposed.D iff e r ent a lgorithm s a r e used for different noise densities.I f the noise density is l ow,the m ean filter with effec tive signa l is used;if the noise density is high,the recursive w indow filter is used.Lots of experi m ents show that the results of salt&pe ppe r noise filte ring and de tail2p r e serving are grea tly i m pr oved.Key wor ds:salt&pepper noise;extre m e detect;m ean filter;r ecursive。
几种混合滤波器的比较研究
⎧1 g (i, j ) = ⎨ ⎩0
f (i, j ) = max k 或 f (i, j ) = min k f (i, j ) ≠ max k 或 f (i, j ) ≠ min k
(3-27)
先用自适应中值滤波算法消除脉冲噪声。对区域 Rk 中满足 g (i, j ) = 1 的像素个数进行 统计,用统计出的总个数与区域 Rk 中所有像素个数之比 qk 来评定该区域受噪声污染的程 度,根据噪声干扰的大小来自适应地确定滤波窗口的尺寸 lk 。 自适应地根据下面的公式确定窗长
k k Ei , j = {(i + s, j + t ) | (i, j ) ∈ Rk , s, t ∈ [− , ]} (3-31) 2 2 某一像素 (i + s, j + t ) 对应的加权系数 ci , j , s ,t 是由其灰度值 h(i + s, j + t ) 与中 在 Ei , j 中,
qk ≤ p1 ⎧3 ⎪ lk = ⎨5 p1 < qk ≤ p2 ⎪7 qk > p2 ⎩
其中
(3-28)
p1 和 p2 为小于 1 的正常数,表示不同脉冲噪声的噪声密度。
对区域 Rk 中满足 g (i, j ) = 1 的脉冲噪声点进行滤波处理, g (i, j ) = 0 的点保留本身的灰 度值。滤波时,需要考虑脉冲噪声点周围的各像素,并与区域 Rk 中最大灰度值 max k 和最 小灰度值 min k 不相等的像素灰度值组成一集合
均值滤波算法

均值滤波算法
均值滤波算法是用来处理和处理图像噪声的一种重要的图像处
理方法,它可以滤除与图像强度相关的不恰当的噪声。
它的主要原理是将图像中的每一个像素点的值取平均值后替换它们原本的像素值,从而降低图像中存在的噪声。
均值滤波可以有效地抑制噪声,但也会丢失图像的细节部分,比如边缘等。
均值滤波算法可以把一个图像划分为一系列的小型子频段,然后计算每一个小型子频段的平均值,以代替原始图像中的像素值。
一般来说,均值滤波算法的具体步骤如下:首先分割原始图像,然后取每一个小块的像素平均值,最后扩散现有的像素平均值到周围的像素点,替换它们原本的像素值。
均值滤波算法有一定的局限性,其去噪能力有限,特别是对椒盐噪声时尤其明显。
另外,由于均值滤波算法在去噪时将图像细节部分模糊化,所以只有在图像去噪和模糊处理上才能使用该算法。
均值滤波算法是一种非常有效的处理图像噪声的方法,在各种计算机视觉任务中都有被广泛的使用。
它的主要特点是快速、实现简单、能有效去噪,但是也有一定的局限性,所以只有在某些应用场合才能起到良好的效果。
均值滤波的实现使用的是像素替换的方法,其处理的过程是用一定区域的像素取平均来替换掉原有像素,在处理噪声时会出现对图像细节失真的情况,并且椒盐噪声处理能力较弱。
一般来说,均值滤波在图像去噪和模糊处理上可以得到很好的效果,但是如果要获得较好
的去噪效果,还可以考虑使用改进的均值滤波算法,比如加权均值滤波算法、中值滤波算法或者高斯滤波算法。
总之,均值滤波算法是一种非常有效的处理噪声的方法,它在计算机视觉任务中有着广泛的应用,能够有效地抑制噪声,但也会丢失图像的细节部分,如果要获得更好的去噪效果,可以考虑使用改进版的均值滤波算法。
一种改进的非局部均值图像去噪算法
、 .8 b13
・
计
算
机
工
程
21 0 2年 2月
F br a y 01 e u r 2 2
NO4 .
Co mpu e trEng n e i g i e rn
图 形 图像处 理 ・
一
文章编号:1 0 48 02 4.l9_3 文献标识码: 0 —32( lo_o9L0 o 2 ) _ A
提 出原 始非 局部均 值( iia No — clMen ,O L 算 Or nl nl a g o as N M)
知一 副离散含 噪图像 v v )i } ={( I , ,其中 , , 表示 图像 域。 对于 图像 中的任意一个像 素 i ,ON M 算法利用 图像 中所有 L 像素灰度值的加权 平均来得到该 点的灰度 估计值 1 ,即 :
D0I 1 . 6 0i n10 —4 82 1 . . 5 : O3 9 .s . 03 2 . 20 0 9 s 0 0 46
1 概 述
图像去噪是 图像处理领域 中最基础和广泛研究 的热点 问 题 。其 目的是为 了去 除图像 获取 或者传 输 中的各种 噪声污 染” J 。 。通过对 局部均值 滤波算 法的研究 和对 比,文献【—] 12
基金项 目:国家 自然科学基金资 助项 目(13 0 8 5050)
() 1
2 噪声模型与非局部均值滤波
本文假设噪声信号为与图像无: 关的加性高斯 白噪声 ,噪
声模型为 :
( =X( +Ⅳ() ) )
作者筒介 : 晓明( 6 一) 刘 1 3 ,男 , 9 教授、博士 后,主研方向 : 图像处
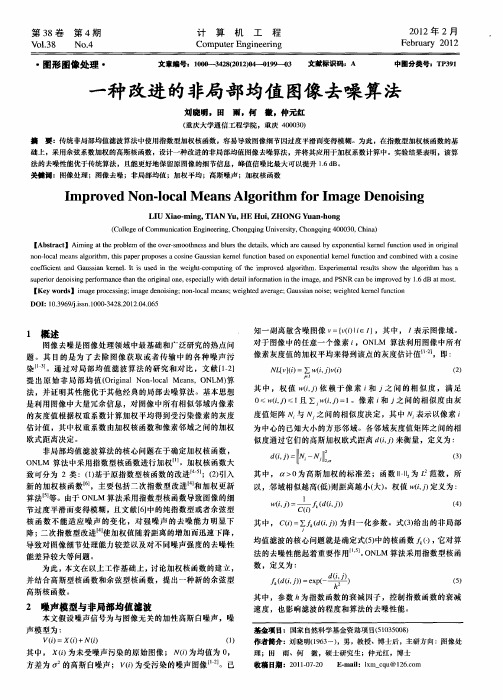
础上 , 用余弦系数加权 的高斯核函数 ,设计一种改进 的非局部均值 图像 去噪算法 ,并将其应用于加权系数计算 中。实验结果表 明,该算 采 法的去噪性能优于传统算法 ,且能 更好地 保留原 图像 的细节信息 ,峰值信 噪比最大可 以提升 1 B .d 。 6
一种改进的中值滤波算法(张恒等)
>国防科技大学航天与材料工程学院:长沙 "D$$GA@
摘 要 通 常:大 部 分 自 然 图 像 中 同 时 存 在 颗 粒 噪 声 和 高 斯 噪 声:而 单 纯 地 用 中 值 滤 波 算 法 或 均 值 滤 波 难 以 同 时 尽 可能地消除混合噪声H针对这一问题:I00和 J*77*. 提出了一种改进的均值滤波算法 K&15,501L(5..01K0*) >KLK@:虽然 KLK 算法的滤波效果相对于传统的平滑算法已有了很大的改善:但是 KLK 的滤噪能力在很大程 度 上受到了阈值的限制H在分析 KLK 算法和传统平滑算法结构特点的基础上提出了一种改进的自适应中值滤波 算 法H该算法对含有混合噪声的图像上每一点的 MNM 区域应用自适应算子H对于不同的图像区域:算子也相应地 有 所 不 同:其 中 算 子 中 的 权 值 选 取 依 赖 于 区 域 的 灰 度 中 值:且 当 某 点 的 灰 度 越 接 近 灰 度 中 值:其 权 值 就 相 应 地 越 大H实践证明:新算法的处理结果优于传统的滤波算法和 KLK 滤波:且没有阈值限制H 关键词 图像处理 改进的中值滤波 混合噪声 自适应 中图法分类号=LOA!D9"D 文献标识码=< 文章编号=D$$PBC!PD>#$$"@$"B$"$CB$"
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
图像 在成像 、 传输 、 存储过 程 中会引入 许多 噪声 , 图像 去 噪 旨在去 除噪声的同时 , 尽可 能保 留图像 细节信 息。图像 噪声 的
种类很 多 , 主要有 高斯 噪声 、 伽 马 以及 椒盐 噪声等 。其 中, 高斯 噪声来 源于电子电路噪声 和低照 明或 高温带 来的传感 器 噪声 , 具有密度大 、 噪声强度 波动范 围宽等特 点 …。图像 受到 高斯 噪
第3 0卷 第 1 2期
2 0 1 3年 1 2月
计算机 应 用与软 件
Co mp u t e r A p p l i c a t i o n s a n d S o f t wa r e
V 0 1 . 3 0 N o . 1 2
De c .2 01 3
一
种 改 进 的 均值 滤 波 算 法
与 中心像素 间的距 离。实验 结果 表明 , 该 算法能有效去除噪声 , 较好地保 留 图像边 缘细节 , 相 比传 统均值 滤波和 自适 应均值 滤波算 法有更好 的去 噪能力。
关 键词 中ຫໍສະໝຸດ 图分 类 号高斯 噪声 图像 去噪 均值滤波 噪声 方差
T P 3 9 1 . 4 1 文 献 标 识 码 A
t h i s ,we p r o p o s e a mo d i i f e d a v e r a g e i f l t e i r n g lg a o r i t h m.I n t h e a l g o i r t h m ,t h e c o mp u t a t i o n o f g r a y a v e r a g i n g v lu a e f o c e n t r l a p i x e l i n l o c l a wi n d o w c o n s i d e r s b o t h t h e g r a y v a l u e d i f e r e n c e a n d t h e s p a t i l a d i s t a n c e b e t we e n t h e c e n t r l a p i x e l a n d o t h e r n e i g h b o u r i n g p i x e l s i n c u r r e n t l o c l a w i n d o w. E x p e i r me n t a l r e s u l t s s h o w t h a t t h e p r e s e n t e d a l g o i r t h m c a n e f f e c t i v e l y r e mo v e Ga u s s i a n n o i s e a s we l l a s p r e s e r v i n g t h e e d g e d e t a i l s o f t h e i ma g e we l 1 .I t i s s u p e io r r t o t r a d i t i o n me a n i f l t e r nd a a d a p t i v e a v e r a g i n g i f l t e r a l g o it r h ms i n d e — n o i s e c a p a b i l i t y .
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 0 — 3 8 6 x . 2 0 1 3 . 1 2 . 0 2 5
A M oDI F I ED AVERAGE F I LTERI NG ALG oRI THM
Z h u S h i h u Yo n C h u n x i a
( S c h o o l o fP h y s i c s a n d E l e c t r o n i c E n g i n e e r i n g , J i a n g s u N o r m a l U n i v e r s i t y , X u z h o u 2 2 1 1 1 6 , J i a n g s u , C h i n a )
Ke y wo r d s Ga u s s i a n n o i s e I ma g e d e - n o i s i n g Av e r a g e i f l t e in r g No i s e v a i r a n c e
较 好的滤波效果 。
朱士虎 游春霞
江苏 徐州 2 2 1 1 1 6 )
( 江苏师范大学物理与 电子 - I - 程学 院
摘
要
针对均值 滤波在 抑制噪声 的过程 中会损 失 图像 的边缘 等细 节信 息从 而导致整 幅 图像模 糊的 问题 , 提 出一种均值 滤波 改
进算法。算法中局部窗口内中心像素灰度均值的计算既考虑了窗口内各像素与中心像素间的灰度值差异, 又顾及 了窗口内各像素