模糊控制系统的Matlab仿真过程
第五章模糊控制系统的MATLAB仿真
2. 表述模糊规则的语言和格式编辑 1)语言型 2)符号型 3)索引型 3. 模糊规则的编辑方法 1)编辑一条新模糊规则的方法 2)修改模糊规则 3)删除编好的模糊规则
例题: (1)确定结构 (2)编辑输入变量“level”和“rate” (3)编辑输出量“valve” (4)编辑模糊规则 (5)保存液位FIS并退出FIS编辑系统
4)编修模糊子集位置 5)删除模糊子集的方法 • 单击 • 删除
3. SUGeno型FIS隶属函数MF的编辑 1)进入二维SUGeno型FIS编辑器 2)调出Sugeno型MF编辑器
5.2.4 模糊规则编辑器 1. 模糊规则编辑器界面简介 2. 1)Rule编辑器上的主菜单 3. 2)Rule编辑器上的显示区和编辑区 4. 3)Rule编辑器上的“显示带” 5. 4)Rule编辑器上的编辑功能按钮
Sugeno型模糊推理系统编辑器的模糊逻辑算法与Mamdani型有所不同
5.2.3 隶属函数编辑器 1.MF编辑器界面简介
2. Mamdani型FIS中隶属函数(MF)的编辑 1)编辑输入变量的论域和显示范围 2)增加覆盖输入量模糊子集的数目 • 编辑MF类型 • 编辑隶属函数的数目
• • • • 3)编修隶属函数曲线 MF的命名 细化MF的类型 非标准函数MF的编修
5.2 模糊推理系统的设计与仿真
5.2.1 模糊推理系统的图形用户界面简介
5.2.2 模糊推理系统编辑器 1.FIS编辑器界面简介 • 菜单条和模框区 File Edit View
模糊逻辑区和当前变量区 2. FIS推理系统的编辑 3.编辑FIS的维数 4.编辑FIS输入、输出量的名称
5.编辑FIS的名称 6.编辑模糊逻辑推理的具体算法 在下部模糊逻辑区中
基于matlab的模糊控制器的设计与仿真
基于MATLAB的模糊控制器的设计与仿真摘要:本文对模糊控制器进行了主要介绍。
提出了一种模糊控制器的设计与仿真的实现方法,该方法利用MA TLB模糊控制工具箱中模糊控制器的控制规则和隶属度函数,建立模型,并进行模糊控制器设计与仿真。
关键词:模糊控制,隶属度函数,仿真,MA TLAB1 引言模糊控制是一种特别适用于模拟专家对数学模型未知的较复杂系统的控制,是一种对模型要求不高但又有良好控制效果的控制新策略。
与经典控制和现代控制相比,模糊控制器的主要优点是它不需要建立精确的数学模型。
因此,对一些无法建立数学模型或难以建立精确数学模型的被控对象,采用模糊控制方法,往往能获得较满意的控制效果。
模糊控制器的设计比一般的经典控制器如PID控制器要复杂,但如果借助MATLAB则系统动态特性良好并有较高的稳态控制精度,可提高模糊控制器的设计效率。
本文在MATLAB环境下针对某个控制环节对模糊控制系统进行了设计与仿真。
2 模糊控制器简介模糊控制器是一种以模糊集合论,模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。
显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。
本章着重介绍模糊控制的基本思想,模糊控制的基本原理,模糊控制器的基本设计原理和模糊控制系统的性能分析。
随着科学技术的飞速发展,在那些复杂的,多因素影响的严重非线性、不确定性、多变性的大系统中,传统的控制理论和控制方法越来越显示出局限性。
长期以来,人们期望以人类思维的控制方案为基础,创造出一种能反映人类经验的控制过程知识,并可以达到控制目的,能够利用某种形式表现出来。
而且这种形式既能够取代那种精密、反复、有错误倾向的模型建造过程,又能避免精密的估计模型方程中各种方程的过程。
同时还很容易被实现的,简单而灵活的控制方式。
于是模糊控制理论极其技术应运而生。
3 模糊控制的特点模糊控制是以模仿人类人工控制特点而提出的,虽然带有一定的模糊性和主观性,但往往是简单易行,而且是行之有效的。
模糊控制的Matlab仿真实例
其他例子
模型Shower.mdl―淋浴温度调节模糊控制系统仿真; 模型slcp.mdl―单级小车倒摆模糊控制系统仿真; 模型 slcp1.mdl―变长度倒摆小车模糊控制系统仿
真; 模型 slcpp1.mdl—定长、变长二倒摆模糊控制系
统仿真; 模型slbb.mdl―球棒模糊控制系统仿真; 模型sltbu.mdl―卡车智能模糊控制倒车系统仿真; 模型sltank2.mdl ― 用子系统封装的水箱控制仿
为简单起见,我们直接利用系统里已经编辑好的 模糊推理系统,在它的基础上进行修改。这里我 们采用与tank . fis中输入输出变量模糊集合完 全相同的集合隶属度函数定义,只是对模糊规则 进行一些改动,来学习模糊工具箱与仿真工具的 结合运用。对于这个问题,根据经验和直觉很显 然可以得到如下的模糊度示 波器
冷水阀子系统
这个仿真模型的输出是用示波器来表示的,如 图所示。通过示波器上的图形我们可以清楚地 看到温度和水流量跟踪目标要求的性能。
水温示波器
水流示波器
水温偏差区间模糊划分及隶属度函数
水流量偏差区间模糊划分及隶属度函数
输出对冷水阀控制策略的模糊化分及隶属度函数
选Edit菜单,选择Rules, 弹出一新界面Rule Editor. 在底部的选择框内,选择相应的 IF…AND…THEN 规则,点击Add rule 键,上部 框内将显示相应的规则。本例中用9条左右的规 则,依次加入。如下图所示:
模糊逻辑工具箱仿真结果
模糊规则浏览器用于显示各条模糊控制规则对 应的输入量和输出量的隶属度函数。通过指定 输入量,可以直接的显示所采用的控制规则, 以及通过模糊推理得到相应输出量的全过程, 以便对模糊规则进行修改和优化。
这样的结果与实际情况还是有些不符。通常顾客都是给15%的 小费,只有服务特别好或特别不好的时候才有改变,也就是说, 希望在图形中间部分的响应平坦些,而在两端(服务好或坏) 有凸起或凹陷。这时服务与小费是分段线性的关系。例如,用 下面 MATLAB 语句绘出的下图的情况。
模糊控制系统的MATLAB仿真与应用
另外 " 对于 & 还可以 9 H 3 @ =型 的 模 糊 推 理 系 统 " 利 用 DM$ # P$ % & D4 C N 6 5 J 3M3 6 K= 8 O 9 Q Q R% @ 2 3 8 3 @ ? 3 编 辑 器 进 行 自 适 应 神 经 模 糊 推 理 系 统 的 " & R > 成高亮红色 " 并且相应的规则显示 在图形窗口的底部 ) 注意到若有一个小图形是空的 " 则对应于这个规则中该变量的特征值为 @ )第三 = @ 3 列的最后一个小图形表示给定推理系统的加权合计 判定 ) 此判定依赖于系统的输入值 )
图- $ % &编辑窗口
曲面观察器 在命令窗口输入. # ! ’ > 9 8 2 J 5 3 K/ 命令 " 或在各个编辑器窗口选择相应的菜单 " 即可打 开模糊推理的输入输出曲面视图窗口 ) 该窗口用于 显示输入输出量 对 应 的 表 面 空 间 " 并可改变各轴对 应的变量及观察 视 角 " 便于用户对设计的模糊推理 系统进行修改和优化 )
模糊控制系统设计的关键是模糊控制器的设
万方数据 邢春贵 ’ 男& 吉林长春人 & 硕士研究生 & 主要领域 . 模式识别与智能控制 0 ( : 9 ; 8& 收稿日期 . + * * , 8* 8 8( )
,期
邢春贵等 0 模糊控制系统的 TDW U DX仿真与应用
Z7 ! Z
具 箱 中有 !个带 有 图 形 界 面 的 基 本 工 具 " 它们分别 是 模 糊推理系统 # 编 辑 器( 隶 属 度 函 数 编 辑 器( ’ $ % & 模糊规则编辑器 ( 模糊规则观察器和曲面观察器 ) 这 些* 工具之间是动态链接的 使用它们中的任意 " +% 一个对 $ 的 修 改 将 影 响 到 任 何其它已打开的 % & 中的显示结果 ) * +% 模糊推理 系 统 编 辑 器 该 编 辑 器 用 于 设 计 # , ’ 和显示模糊推理系统的一些基本信息与参数 ) 如图 在窗口的上半部以图形框的形式列出了模 -所 示 " 糊推理系统的基本组成部分 " 即输入模糊量 ( 模糊规 则和输出模糊变量 ) 通过鼠标双击上述图形 " 能够激 活隶属函数编辑器和模糊规则编辑器等相应的编辑 窗口 ) 在窗口的下半部分的左侧列出了模糊推理系 统 的 名 称( 类 型 和 一 些 基 本 属 性" 包括. 与/ 运算方 法( 或/ 运算方 法 ( 蕴 涵 运 算( 模糊规则的综合运算 . 以 及 去模糊化的 方 法 等 " 用户只需用鼠标即可设定 相应的属性 ) 在图 -中 " 模糊推理系统的基本属性设 定为 0 与/ 运算采用极小运算 " 或/ 运算采用极大运 . . 算" 模糊蕴涵采用极小运算 " 模糊规则综合采用极大 运算 " 去模糊化采用重心法 ) 窗口下半部分的右侧 " 列出了当前选定的模糊语言变量的名称及其论域范 围)
模糊控制matlab
模糊控制matlab模糊控制是一种基于模糊数学理论的控制方法,它可以有效地处理非线性系统和模糊系统的控制问题。
在模糊控制中,通过将输入、输出和中间变量用模糊集合表示,设计模糊逻辑规则以实现控制目标。
本文将介绍如何用Matlab实现模糊控制,并通过实例讲解其应用和效果。
1. 模糊集合的表示在Matlab中,我们可以使用fuzzy工具箱来构建和操纵模糊系统。
首先,我们需要定义输入和输出的模糊集合。
例如,如果我们要控制一个直线行驶的自动驾驶汽车,可以定义速度和方向作为输入,定义方向盘角度作为输出。
我们可以将速度和方向分别划分为缓慢、中等、快速三个模糊集合,将方向盘角度划分为左转、直行、右转三个模糊集合。
可以使用Matlab的fuzzy工具箱中的fuzzy集合函数实现:slow = fuzzy(fis,'input',[-10 -10 0 20]);gap = fuzzy(fis,'input',[0 20 60 80 100]);fast = fuzzy(fis,'input',[60 80 110 110]);其中,fis为模糊系统对象,输入和输出的模糊集合分别用fuzzy函数定义,分别用输入或输出、模糊集合变量名、模糊集合界限参数表示,如fuzzy(fis,'input',[-10 -10 0 20])表示定义一个输入模糊集合,变量名为slow,其界限参数为[-10 -10 0 20],即表示此模糊集合上下界是[-10,-10]和[0,20]。
2. 设计模糊控制规则在Matlab中,可以使用fuzzy工具箱的ruleviewer函数来设计模糊控制的规则库。
规则库由模糊条件和模糊结论构成,用if-then形式表示。
例如,定义类别均为slow和keep的输入,输出为类别均为left的控制操作的规则如下:rule1 = "if (slow is slow) and (keep is keep) then (left is left);";其中,slow和keep为输入的模糊变量名,left为输出的模糊变量名。
实验一 模糊控制器的MATLAB仿真
实验一模糊控制器的MATLAB仿真一、实验目的本实验要求利用MATLAB/SIMULINK与FUZZYTOOLBOX对给定的二阶动态系统,确定模糊控制器的结构,输入和输出语言变量、语言值及隶属函数,模糊控制规则;比较其与常规控制器的控制效果;研究改变模糊控制器参数时,系统响应的变化情况;掌握用 MATLAB 实现模糊控制系统仿真的方法。
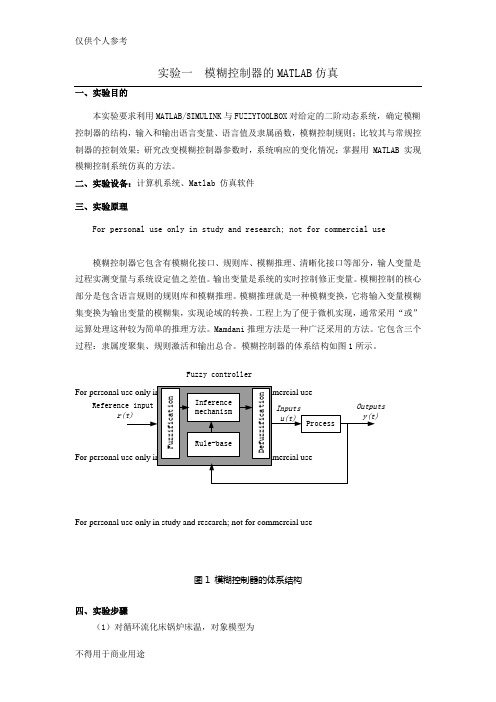
二、实验设备:计算机系统、Matlab 仿真软件三、实验原理For personal use only in study and research; not for commercial use模糊控制器它包含有模糊化接口、规则库、模糊推理、清晰化接口等部分,输人变量是过程实测变量与系统设定值之差值。
输出变量是系统的实时控制修正变量。
模糊控制的核心部分是包含语言规则的规则库和模糊推理。
模糊推理就是一种模糊变换,它将输入变量模糊集变换为输出变量的模糊集,实现论域的转换。
工程上为了便于微机实现,通常采用“或”运算处理这种较为简单的推理方法。
Mamdani推理方法是一种广泛采用的方法。
它包含三个过程:隶属度聚集、规则激活和输出总合。
模糊控制器的体系结构如图1所示。
For personal use only in study and research; not for commercial use图1 模糊控制器的体系结构四、实验步骤(1)对循环流化床锅炉床温,对象模型为()()1140130120++s s采用simulink 图库,实现常规PID 和模糊自整定PID 。
(2)确定模糊语言变量及其论域:模糊自整定PID 为2输入3输出的模糊控制器。
该模糊控制器是以|e|和|ec|为输入语言变量,Kp 、Ki 、Kd 为输出语言变量,其各语言变量的论域如下:误差绝对值:e={0,3,6,10}; 误差变化率绝对值:ec={0,2,4,6}; 输出Kp :Up={0,0.5,1.0,1.5}; 输出Ki :Ui={0,0.002,0.004,0.006};输出Kd :Ud={0,3,6,9}。
模糊控制在matlab中的实例
模糊控制在matlab中的实例模糊控制是一种应用广泛的控制方法,它可以处理那些难以精确建立数学模型的系统。
在Matlab中,使用Fuzzy Logic Toolbox工具箱可以方便地实现模糊控制系统。
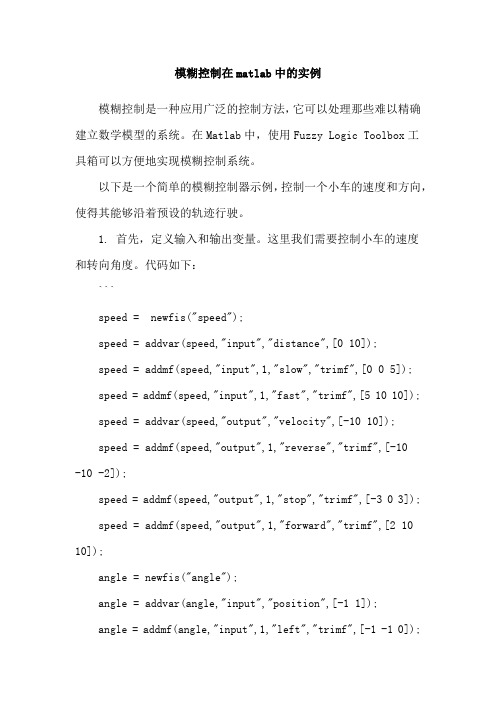
以下是一个简单的模糊控制器示例,控制一个小车的速度和方向,使得其能够沿着预设的轨迹行驶。
1. 首先,定义输入和输出变量。
这里我们需要控制小车的速度和转向角度。
代码如下:```speed = newfis("speed");speed = addvar(speed,"input","distance",[0 10]);speed = addmf(speed,"input",1,"slow","trimf",[0 0 5]);speed = addmf(speed,"input",1,"fast","trimf",[5 10 10]); speed = addvar(speed,"output","velocity",[-10 10]);speed = addmf(speed,"output",1,"reverse","trimf",[-10-10 -2]);speed = addmf(speed,"output",1,"stop","trimf",[-3 0 3]); speed = addmf(speed,"output",1,"forward","trimf",[2 10 10]);angle = newfis("angle");angle = addvar(angle,"input","position",[-1 1]);angle = addmf(angle,"input",1,"left","trimf",[-1 -1 0]);angle = addmf(angle,"input",1,"right","trimf",[0 1 1]); angle = addvar(angle,"output","steering",[-1 1]);angle = addmf(angle,"output",1,"hard_left","trimf",[-1 -1 -0.5]);angle = addmf(angle,"output",1,"soft_left","trimf",[-1 -0.5 0]);angle = addmf(angle,"output",1,"straight","trimf",[-0.5 0.5 0.5]);angle = addmf(angle,"output",1,"soft_right","trimf",[0 0.5 1]);angle = addmf(angle,"output",1,"hard_right","trimf",[0.5 1 1]);```2. 然后,定义模糊规则。
模糊控制在matlab中的实例
模糊控制在matlab中的实例模糊控制是一种基于经验知识的控制方法,与传统的精确控制方法不同,它允许对系统的行为进行模糊描述,并通过一套模糊规则来对系统进行控制。
在实际应用中,模糊控制常常用于处理非线性、复杂和不确定的系统,例如温度控制、汽车制动系统等。
在MATLAB中,可以通过使用Fuzzy Logic Toolbox工具箱来实现模糊控制。
下面以一个简单的温度控制系统为例,来介绍如何在MATLAB中进行模糊控制的实现。
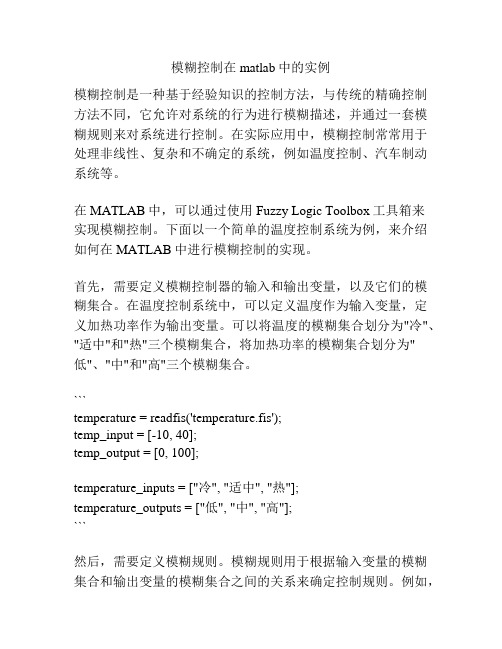
首先,需要定义模糊控制器的输入和输出变量,以及它们的模糊集合。
在温度控制系统中,可以定义温度作为输入变量,定义加热功率作为输出变量。
可以将温度的模糊集合划分为"冷"、"适中"和"热"三个模糊集合,将加热功率的模糊集合划分为"低"、"中"和"高"三个模糊集合。
```temperature = readfis('temperature.fis');temp_input = [-10, 40];temp_output = [0, 100];temperature_inputs = ["冷", "适中", "热"];temperature_outputs = ["低", "中", "高"];```然后,需要定义模糊规则。
模糊规则用于根据输入变量的模糊集合和输出变量的模糊集合之间的关系来确定控制规则。
例如,当温度为"冷"时,加热功率应该为"高"。
可以根据经验知识定义一系列模糊规则。
```rules = ["冷", "高";"适中", "中";"热", "低";];```接下来,需要定义模糊控制器的输入和输出变量值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
出量 u 的模糊集合为 C , 当 u0 是 C 的中位数时 , 则 有 u0 满足式 (3 ) , 也就是说隶属度函数曲线与 u 轴 之间的面积以 u0 为界 ,两边相等 。这就是中位数法 的基本原理 。
Θ Θ μ u0 C
(u)
d
u
=
b
μC ( u) d u
(3 )
a
u0
3 建立控制系统模型及调整模糊控制
m 车体重量 (1 300kg )
Aρ 气动阻力常数 (0. 3Ns2/ m2 )
d 恒定摩擦力 (100 N )
f
驱动 (刹车) 力 (N )
τ 驱动 (刹车) 时间常数 ( s )
1机械与电子22005 (1)
u 控制力 (N )
2 建立模糊控制环节
使用 f uzzy logic toolbox 建立模糊控制环节 ,以
模糊控制系统的 Matlab 仿真过程
孙施良 ,王阳明 (上海大学 ,上海 201800)
The Matlab Simulating Process of a Fuzzy Control System
SUN Shi liang , WANG Yang ming (Shanghai University ,Shanghai 201800 ,China)
经常改变车体重量的值 ,就可以在封装时添加变量 d 到对话框里 , 之后就可以通过双击子系统来设置 重量值 d 。
v (t) =
1 m
[
-
Aρv2 (t) -
d + f (t) ]
(1 )
f (t) = τ1 [ - f (t) + u (t) ]
(2 )
式中 v (t) 车辆的速度 ( m/ s )
达到控制系统要求 ,在以上方法调整后仍无法满足 要求时 ,考虑进一步细化语言变量的取值 ,相应地增 加控制规则 。
在调节比例因子时 ,应考虑到实际变量的变化 范围 ,特别是输出控制量不能超出执行机构的实际 输出能力 。在采用中位数法的前提下 ,不断调整比例 因子 G1 ,G2 和 G3 ,使系统达到较好的控制效果 , 对 G1 ,G2 和 G3 的调整 ,实际上是在不断改变控制器 输入输出变量论域的大小 , 调整后 e , i 和 u 的论域 范围分别相当于基本论域大小乘以 1 / G1 ,1 / G2 和 G3 [5 ]。比例因子调节前后系统的阶跃响应如图 2 所 示 。当 G1 = 10 ,G2 = 0 .7 和 G3 = 12 时 ,输出效果良 好 ,达到了控制要求 。
算 、图形图像显示以及编程于一体 ,是常用的控制系 统分析与设计工具 。1990 年 ,Mat h Works 软件公司 为 Matlab 提供了新的控制系统图形化模型输入与 仿真工具 Simulink ,它是 Matlab 的一个扩展软件 , 该工具很快就在控制工程界获得了广泛的认可 ,使 得仿真软件进入了系统模型的图形组态阶段 。
[ 4 ] 洪锡军 ,等. 基于 Internet 的功能远程监测报警系统 [J ] . 上海交通大学学报 ,2000 ,34 (10) :45 - 48.
作者简介 :郑 欣 (1976 - ) ,男 ,贵州贵阳人 ,电子技术工程
师 ,萨塞克斯大学硕士研究生 ,研究方向为现代通信和远程测控网
络 ;郑宇恒 (1980 - ) ,男 ,贵州贵阳人 ,英国伦敦大学学院博士研究
Key words : Simulink ; scaling gains ; def uzzifica2 t io n
0 引言
Matlab 于 1984 年由 Mat h Works 软件公司推 出 ,是一种用于科学计算的高性能语言 。它集数值计
上述装置采用的是 D TMF 编码控制方式 ,密码容量 大 ,其接收 、发送装置原理电路如图 4 所示 。
集合表示 ,但需注意的是 ,这些数字没有实际数值含
义。
变量 e ,i , u 的隶属度函数均采用三角函数形
式 ,基本论域分别设定如下 :
e ∈[ - 20 ,20 ],i ∈[ - 12 ,12 ], u ∈[ - 400 ,400 ]
解模糊方法暂定为中位数法 ( bisector) [3 ] 。设输
图 2 比例因子调节前后
解模糊是以模糊推理产生的模糊集合为基础 的 。从模糊推理的角度 ,解模糊方法可分为 2 类 ,一 类解模糊方法是以每条控制规则经模糊推理产生的 多个模糊集合为基础 ,另一类则是以把这多个集合 进一步合成产生的一个模糊集合为基础 。Fuzzy log2 ic toolbox 中提供的 Mamdani 型模糊控制器的解模 糊方法属于后一类 。模糊逻辑工具箱里提供了 5 种 不同 的 解 模 糊 方 法 可 供 使 用 , cent roid , bisector , mom ,lom 和 som[6 ] 。当 G1 = 10 ,G2 = 0 . 7 ,G3 = 12 时 ,采用 3 种不同的解模糊方法系统的阶跃响应如 图 3 所示 ,最大隶属度中取最大 (lom) 和最大隶属度 中取最小 (som) 2 种方法产生了剧烈的振荡 ,而且在 重新调整比例因子的情况下 ,系统输出没有明显改 善 ,而采用中位数法时取得良好效果[7 - 8 ] 。最大隶
图 4 无线密码遥控接收 、发射装置
其工作过程为 :机站开机时 ,由负责人从密码键 盘输入设定的密码并由 D TMF 编码器 M K5087 编 码 ,由无线长波发射组件 T630 ,以长波形式向外发 射 ,由主机内接收器的长波接收组件 T631 接收解 调出 D TMF 编码信号 ,送 D TMF 译码器译码 ,经对 码后 ,送入执行器件对主机开锁工作 ,若送入密码与 内置密码不对 ,经限时 、限次处理后 ,仍不符合 ,转入 相应报警电路 ,从而有效加强了机站的主机安全管 理 ,避免事故出现 。
生 ,研究方向为 GPS 在城市峡谷中的应用 ,计算机网络和效能网络
优化 。
1机械与电子22005 (1)
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reFra bibliotekerved.
属度中取最大法和最大隶属度中取最小法只利用了
几个点的信息 ,不能充分利用模糊推理结果 ,控制效
·16 ·
参考文献 :
[ 1 ] Passino Kevin M , Yurkovich Stephen. Fuzzy control[ M ] . 北京 :清华大学出版社 , 2001.
1 建立被控对象模型
被控对象的微分方程如式 (1) 、式 (2) 所示 ,是一 个非线性对象[1 ] 。在 Simulink 中建立被控对象子系 统 ,并加以封装 ( mask subsystem) [2 ] 。所谓封装就是 将一般子系统的内部结构隐藏起来 ,当双击封装后 的子系统时会弹出一个参数设置对话框 ,可方便的 对子系统内部参数进行设置 。如在仿真过程中需要
收稿日期 :2004 11 30
t he tool of Matlab software. The int roduction is based on t he speed cont rol of t he automobile. Through t he simulating experiment ,how a few factors of t he f uzzy cont roller influenced t he cont rol system is especially int roduced.
其次 ,测控网络中通信器件中常用的串口部件 为 RS232 ,RS485 和 RS422 等 。它们有效通信距离 各不相同 ,但总体看都具有传输距离近 、传输速率低 和抗干扰能力差等缺点 。因此 ,使用它们仍是制约网
·14 ·
络发展的一个重要因素 。我们曾实验用编码/ 解 码集成电路芯片如 SED5026/ 27 构成分布式测控网 络现场级的串行通信上 ,实践证明它们的使用不仅 提高了传输速率 ,扩大了传输距离并实现自动纠错 重发 ,使系统的通信具有比较高的可靠性 ,因此不失 为一种较好的现场级信号传输的方法 。
1972 年 Zadeh 提出模糊控制的基本原理 ,到了 20 世纪 80 年代末日本出现大量的模糊家电产品 , 用事实证明了模糊控制的成功 。模糊控制系统设计 可以分为 2 大类 。一类是利用人的经验知识来设计 模糊控制器 ,再根据实际控制效果调试修正 ,另一类 方法是先建立被控对象的数学模型 ,并由经验知识 初步设计模糊控制器 ,然后根据数学模型对控制系 统的稳定性和性能指标等进行理论分析和仿真 ,最 后依据分析与仿真结果修正模糊控制器 。前一种方 法对于难以建立数学模型的复杂控制问题 ,显得简 单有效 ,但是由于缺乏对象的数学模型 ,无法对控制 系统稳定性和性能指标等进行理论分析 ,后一种方 法与传统的控制方法思路类似 ,但是弥补了传统控 制方法只适用于线性系统的缺陷 ,适用于一般的非 线性 系 统 。本 文 主 要 介 绍 如 何 借 助 Matlab 中 的 Simulink 模块 ,通过仿真实验设计模糊控制系统 。
控制系统的仿真调试主要从以下 2 个方面入 手 :调整输入输出变量论域 (通过调整比例因子实 现) ;选择不同的解模糊方法 。通过适当调节使输出
·15 ·
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
器参数
从 Simulink 界面中的 library browser 中调出各 种元件 ,构造图形化控制系统模型 ,如图 1 所示 。
图 1 控制系统
仿真开始前先用 readfis 指令把控制环节读进仿真 模型[4 ] 。例如 ,Simulink 通过工作空间的变量 a 获得 控制环节信息 ,且控制环节的文件名为 f uzzycruise. fis ,则仿真前要执行 a = readfis (‘f uzzycruise’) 指令 (或直接通过 F IS 文件编辑器的菜单项把 a 导入工 作空间 ,2 者效果一样) 。