气动蠕动式管外爬行机器人的设计与实现
气动爬杆机器人的研制

·开发与创新·0引言在市政工程中,有大量的安装及维修等工作需要爬杆作业。
对于较粗的杆件,人工攀爬和工程车作业都比较方便,但是对于一些直径较细,强度较小的杆件比如路灯杆等,人工攀爬较为困难。
应用带升降机的工程车进行作业,作业成本较高,而且对于狭窄的胡同,工程车难以进入,造成作业困难,因此爬杆机器人的研制一直是市政工程研究的热点[1~4]。
本文设计了一种基于气动元件的爬杆机器人基座,可攀爬普通的杆件,对杆件的直径有较强的适应性。
该气动爬杆机器人载重可达10Kg ,可广泛应用于市政杆件攀爬作业中。
1气动爬杆机器人的机构设计和气路设计考虑到爬杆机器人主要是野外作业,且其爬行的高度、精度相对要求较低,因而本爬杆机器人采用了较简单的结构设计,机器人结构如图1所示。
在图1所示的前后顶杆面向杆件的一侧镶有胶皮,以增大机器人爬杆时的摩擦力。
当该机器人要爬杆时,抽出前顶杆7一端的销钉,将杆件包揽到上下前顶杆7、后顶杆5的中间,然后全部夹紧上下水平夹紧气缸1。
此时,松开下部的水平夹紧气缸1,垂直气缸8收缩,提升机器人的下部,然后夹紧下部的水平气缸1,使下部的后顶杆5和前顶杆7夹紧杆件,然后松开上部的水平夹紧气缸1,此时垂直气缸8的活塞伸出,使机器人的上部上移,一个上升的循环结束;机器人向下爬行时过程相反。
当水平夹紧气缸动作时,其活塞前端的联接块4与后顶杆紧固联接,后顶杆两端的滑动销钉可在侧杆6中滑顺地运动。
爬杆机器人的气路设计如图2所示。
A 与C 为垂直气缸,B 和D 分别为上水平夹紧气缸和下水平夹紧气缸。
当机器人向上爬时,首先上水平气缸将杆件抱紧,然后下水平气缸松开杆件,垂直气缸收缩,带动下面的支架上移,然后下水平气缸抱紧杆件,上水平夹紧气缸松开,垂直气缸伸出,带动上支架上移,循环往复,机器人爬到杆件上方。
机器人从杆件上爬下时,顺序正好相反。
2气动爬杆机器人的控制系统设计考虑到机器人的负重及控制方便等原因,机器人的气动爬杆机器人的研制沈孝芹1,张蔚波1,张凤琴2,于复生1,宿孝庆1(1.山东建筑大学机电工程学院,山东济南250101;2.莱钢股份公司炼钢厂,山东莱芜271126)收稿日期:2008-12-08作者简介:沈孝芹(1974-),女,山东潍坊人,在读博士,副教授。
管道外爬行机器人的设计与仿真

管道外爬行机器人的设计与仿真管道外爬行机器人的应用场景十分广泛。
在石油、天然气等能源领域,长距离的管道运输需要定期检查,以确保无泄漏和腐蚀等问题;在城市的给排水系统中,及时发现管道的破损和堵塞对于保障居民的正常生活具有重要意义;在化工行业,管道的安全运行更是关系到生产的稳定和人员的安全。
设计一款高效的管道外爬行机器人,首先需要考虑其运动方式。
常见的运动方式包括轮式、履带式和足式。
轮式结构简单,运动速度快,但在复杂的管道表面适应性较差;履带式能够提供较好的抓地力和稳定性,但结构相对复杂,重量较大;足式机器人则具有出色的越障能力,但控制难度较高。
综合考虑各种因素,本次设计采用了轮式与履带式相结合的运动方式。
机器人的主体结构由车架、驱动装置、传动系统和控制系统等部分组成。
车架采用高强度铝合金材料,以减轻整体重量并保证足够的强度。
驱动装置选用高性能的直流电机,通过减速器将动力传递给车轮或履带。
传动系统则采用链条或齿轮传动,确保动力的有效传输。
为了使机器人能够在管道外表面稳定爬行,需要设计合适的吸附装置。
常见的吸附方式有磁吸、真空吸附和机械夹持。
磁吸方式适用于铁质管道,但对于非金属管道则无能为力;真空吸附需要保持良好的密封,在管道表面不平整时效果不佳;机械夹持则可以适应各种管道表面,但结构复杂,操作难度大。
经过分析,本次设计采用了真空吸附与磁吸相结合的方式,以提高机器人在不同管道上的适应性。
在控制系统方面,采用了基于微控制器的嵌入式系统。
通过传感器实时采集机器人的位置、速度、姿态等信息,并根据预设的控制算法进行调整。
传感器包括位移传感器、压力传感器、陀螺仪等,以确保机器人能够准确感知周围环境和自身状态。
完成机器人的设计后,接下来进行仿真分析。
仿真软件可以帮助我们在实际制造之前,对机器人的性能进行评估和优化。
首先,建立机器人的三维模型,并导入仿真软件中。
设置好管道的形状、材质和表面粗糙度等参数,以及机器人的运动参数和负载条件。
管道爬壁机器人的设计
管道爬壁机器人设计作品内容简介现在的管道机器人在竖直或者是水平方向都很好的实现了检测与清理功能。
但至今还没有管道产品在复杂的管道中很好的工作。
为此我们设计了这款管道爬壁机器人,它既可以在水平管道中很好的工作还可以在竖直管道中完成工作,能够自如的在水平竖直交叉的复杂管道中完成检测,清理等工作。
该产品的主题结构为车体结构,在水平方向依靠车载力运动,在车体上安装有四个机械手臂,在机械手臂的前端安装有吸盘跟电磁铁,在塑料管道中依靠吸盘在竖直方向上运动,在铁质管道上利用电磁铁的磁力和机械手臂的交叉前进实现竖直方向的运动。
该作品灵活多变,不但可以适应复杂的管道还能够进行多样的工作。
我们依靠机械臂的灵活度与吸盘,电磁铁的吸力来实现该产品的爬壁功能,在水平方向上利用最传统的智能车作为动力,这样的设计完全可以满足水平方向与竖直方向的灵活转变,实现复杂管道的自由穿梭,进而可以让该机器人更好的实现其检测与清理功能。
该管道爬行机器人实现远程电脑控制,所得数据通过反馈处理使机器人能够完成各项做业。
一、研制背景及意义1、随着社会的快速发展,国家生产水平不断提高,产品更新也越来越快。
管道运输在我国运用比较普遍,但管道长期处在压力大的恶劣环境中,受到水油混合物、硫化氢等有害气体的腐蚀。
这些管道受腐后,管壁变薄,容易产生裂缝,造成漏油、漏气的问题,存在重大安全隐患和经济损失。
在管道广泛使用的今天,管道的检测、清理、维护成了一个亟待解决的问题。
但是管道的封闭性和工作环境决定了这项工作的艰难。
时至今日,虽然经过各国学者的努力,已经有各种各样的机器人,但是他们大都存在这样或那样的问题,而且功能不够强大。
2、人民对管道清洁机械的要求是不仅科技含量要高,而且还要绿色、节能、环保。
能够满足不同类型管道的检测、维护、清理等要求。
3、管道爬行机器人的研究更好地为管道的检测、维护、清理提供了新的技术手段,这种技术更好的提高了管道监测的准确性和管道清理的安全性,也便于管道工程管理维护人员制定维护方案,清除管道垃圾防止堵塞,事前消除管道的安全隐患,从而节约大量的维修费用,降低管道维护成本,保障工业生产和人民生活及财产安全。
气动步进蠕动式水闸钢丝绳攀爬机器人研制
doi:10.11832/j.issn.1000-4858.2021.02.027气动步进蠕动式水闸钢丝绳攀爬机器人研制方贵盛",张港VS郑高安",姚林晓2(1.浙江水利水电学院机械与汽车工程学院,浙江杭州310018;2.华北水利水电大学机械学院,河南郑州450045;3.浙江省先进水利装备工程研究中心机器人研究所,浙江杭州310018)摘要:针对现有水闸钢丝人工养护存在工作效率低、安全性能差等问题,提出了一种用于水闸钢丝绳清洗、检测和涂油等养护作业的气动步进蠕动式机器人。
该机器人采用分体式结构,由上部装置和下部装置构成,每部分装置主体结构均由气缸构成。
采用气动方式驱动气缸实现机器人夹紧、移动和导向功能。
采用PLC控制实现机器人沿钢丝绳自主爬升、下降和悬停。
通过改变气缸直径的大小和夹紧气缸的行程,实现机器人在不同直径钢丝绳上带不同负载攀爬作业。
通过调节节流阀进出气大小和伸缩气缸行程,控制机器人的攀爬速度。
样机测试结果表明,该钢丝绳攀爬机器人结构小巧、稳定性好、适应性强,为下一步研制水闸钢丝绳自动维护作业结构奠定了基础。
关键词:水闸;钢丝绳攀爬机器人;气动;蠕动式中图分类号:TH138;TP242文献标志码:B文章编号:1000^858(2021)02-0170-07Development of Pneumatic Robot for Climbing Sluice Wire RopeFANG Gui-sheng1'3,ZHANG Gang1-2'3,ZHENG Gao-an1'3,YAO Lin-xiao2(1.College of Mechanical and Automotive Engineering,Zhejiang University of Water Resources and Electric Power,Hangzhou,Zhejiang310018;2.School of Mechanical Engineering,North China University of Water Resources and Electric Power,Zhengzhou,Henan450045;3.Robot Institute of Zhejiang Advanced Water Conservancy Equipment Engineering Research Center,Hangzhou,Zhejiang310018)Abstract:In order to solve the problems of low efficiency and poor safety of existing sluice wire rope manual maintenance,a pneumatic robot for sluice wire rope cleaning,detection and oiling is proposed.The robot adopts a split structure,which is composed of the upper part and the lower part.The main structure of each part of the device is composed of air cylinders.The pneumatic cylinder is driven to realize the clamping,moving and guiding functions of the robot.PLC control is used to realize the robot climbing,descending and hovering along the wire rope.By changing the diameter of the cylinder and the stroke of the clamping cylinder,the robot can climb with different loads on different diameter wire ropes.The climbing speed of the robot can be controlled by adjusting the inlet and oudet air volume of throtde valve and the stroke of telescopic cylinder.The results of the prototype show that the wire rope climbing robot has small structure,good stability and strong adaptability,which lays a foundation for the further development of automatic maintenance structure of sluice wire rope.Key words:sluice,wire rope climbing robot,pneumatic,worming收稿日期:2020-08-18基金项目:浙江省水利厅科研项目资助(RC1963);浙江省科技厅公益技术研究项目(LGG21F03005)作者简介:方贵盛(1973-),男,江西婺源人,教授,博士,主要从事水利特种机器人、自动化装备与控制等方面的教学与研究工作。
气动管道机器人的创新设计
气动管道机器人的创新设计摘要:该机器人由三部分组成,包括一个伸缩模块和两个支撑模块。
伸缩模块主要由主运动气缸构成,利用驱动气缸的收缩来实现机器人的行走;两个支撑模块结构上完全一样,由支撑气缸产生推力,使机器人的脚与管壁压紧,从而产生机器人行走所需的静摩擦力。
伸缩模块和支撑模块按一定的顺序循环工作,从而实现机器人在管道内的行走。
控制电磁阀的通断电时间来实现调速的功能(有级调速, 设计为高、中、低三档)。
1 引言管道在当今社会已经得到了广泛的应用,管道在长期的使用中难免会破裂、堵塞、积污,但是管道的检测、清理、维护却不是很方便,往往为了寻找管道上的一个裂纹而花费大量的人力和物力。
我们的机器人可以在管道内自由地行走,具有一定的承载能力,可以成为管道检测、清洗设备的载体,使得管道的检测,清洁等工作易于实现。
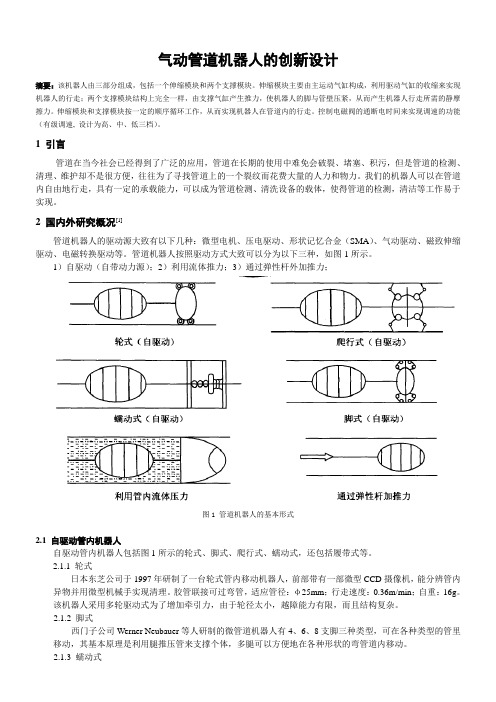
2 国内外研究概况[1]管道机器人的驱动源大致有以下几种:微型电机、压电驱动、形状记忆合金(SMA)、气动驱动、磁致伸缩驱动、电磁转换驱动等。
管道机器人按照驱动方式大致可以分为以下三种,如图1所示。
1)自驱动(自带动力源);2)利用流体推力;3)通过弹性杆外加推力;图1 管道机器人的基本形式2.1 自驱动管内机器人自驱动管内机器人包括图1所示的轮式、脚式、爬行式、蠕动式,还包括履带式等。
2.1.1 轮式日本东芝公司于1997年研制了一台轮式管内移动机器人,前部带有一部微型CCD摄像机,能分辨管内异物并用微型机械手实现清理。
胶管联接可过弯管,适应管径:φ25mm;行走速度:0.36m/min;自重:16g。
该机器人采用多轮驱动式为了增加牵引力,由于轮径太小,越障能力有限,而且结构复杂。
2.1.2 脚式西门子公司Werner Neubauer等人研制的微管道机器人有4、6、8支脚三种类型,可在各种类型的管里移动,其基本原理是利用腿推压管来支撑个体,多腿可以方便地在各种形状的弯管道内移动。
2.1.3 蠕动式清华大学研制了一套小型蠕动机器人系统,其结构如图2,由1蠕动体和2、3、4电致伸缩位移器组成。
管外爬行机器人及其控制系统设计

管外爬行机器人及其控制系统设计贾朝川;杨婷;符茂胜【摘要】主要介绍了一种管道外爬行机器人结构和控制系统的设计.机器人本体结构采用的是关节式,不仅能够攀爬直行管道,而且能够越过T型管道、十字型管道等.针对各个关节的电机的驱动方式选取c8051f020单片机为控制系统核心器件,通过压力传感器检测机器人与管道表面的压力来实现机器人的固定,采用max485多机通信模式实现对多个关节舵机的控制.通过实验室测试,该机器人基本能够实现在直行、十字交叉管道上前进、后退、上升、下降等功能.从而可以为各种工业管道、民用管道、大桥斜拉索、电缆等圆柱形体的质量检测、维护修复等作业提供一种新型的管外行走装置.【期刊名称】《皖西学院学报》【年(卷),期】2014(030)002【总页数】4页(P20-23)【关键词】管道;管外爬行机器人;控制系统;压力传感器【作者】贾朝川;杨婷;符茂胜【作者单位】皖西学院信息工程学院,安徽六安 237012;皖西学院机械与电子工程学院,安徽六安 237012;皖西学院信息工程学院,安徽六安 237012【正文语种】中文【中图分类】TP242.3管道爬行机器人是机器人研究领域的一个主要的研究方向,它分为内管道和外管道机器人,内管道机器人研究较为成熟,而对外管道机器人的研究还相对较少,外管道机器人主要是针对缆索、电缆、电线杆、自来水管道、输油管道、输气管道、输暖管道等圆形管道进行作业。
其中,大多数管道中都含有高温、高压、有毒、有辐射的流体物质,如果发生管道裂纹或者断裂,管内有害物质泄漏将会给人们的性命和财产带来重大的损失,因此,对管道进行定期的检测和保养必不可少[1]。
若仅仅靠人工方法对其进行作业,不仅耗费人力和物力,而且效率也比较低,况且许多场合根本无法容纳人工作业,此类情况下,管外爬行机器人就能充分发挥出它的优越性和实用性。
本文针对圆形管道给出了管外爬行机器人的机械结构及控制系统的模型。
1 管外爬行机器人结构原理根据管道的形状,有些管道并非都是竖直,有些是交叉状等特点。
爬杆机器人说明书范文

爬杆机器人说明书机械创新设计说明书设计名称:爬杆机器人的设计设计人:姜鸿学号:班级:11机制本一班井冈山大学机电学院/11/23第一章背景概述蠕行式仿生变直径杆爬行机器人的研究报告现代生活中,高空作业不断增加,如路灯杆、悬索桥索、杆状城市建筑的清洗、油漆、喷涂料、检查、维护、电力系统架设电缆、瓷瓶清洁等。
当前的清洗、维护工作主要由人工和大型设备来完成,但它们都集中表现出效率低、劳动强度大、耗能高、二次污染严重等问题。
市场上少量使用的气动蠕行式爬行器,其上升和下降运动的实现由气压控制,需要气源和气动控制系统,能量损耗大,而且一般伴有较大的噪声。
因为连接了大量的支持设备,气动蠕行爬行器的体积和活动范围都受到限制,而且设备成本较高。
第二章运动原理—仿生设计在设计移动机器人系统时,首先应考虑机器人的用途,因为不同的用途,移动机器人的移动机构是不同的。
~ J'l-,还应考虑机器人的工作环境、耐久性、稳定性、机动性、可控性、复杂性、外型尺寸及制作费用等。
作为杆件爬行机器人,根据现有的技术方案,有很多种移动方式可供选择。
各种移动方案的比较见表1所示。
表1 爬行机器人移动方案的比较蠕动式承载能力大,运动平稳,控运动速度慢,结构复杂。
制简便,适应能力强。
我们所要设计的这种爬行机器人,它的工作对象为各种型号的城市杆状建筑,要求承载能力大、接触面积小、速度适中,适应能力强,能越障碍物。
经过比较各种方案,笔者设计了一种尺蠖式蠕动爬行结构形式,这是一种新颖的变直径杆仿生爬行机构设计方案,该方案能基本满足我们设定的工作状况。
该机器人是模仿人的爬树动作而设的。
人爬树时,两脚夹紧树杆,两腿一蹬,两手抱住树杆,人向上移,然后两手抱紧树杆,收腿提脚上移,一步步向上爬行。
该机器人的爬行动作原理示意如图1所示。
既然是仿生尺蠖式蠕动,那么在本机器人的设计中,将以实现机器人躯干的伸缩为往复运动的主要动作为目标。
往复运动的实现有很多种常见的机构有:不完全齿轮齿条双侧停歇机构、曲柄连杆机构、圆柱齿轮齿条机构、螺旋丝杆机构等。
气动爬行机器人 液压系统的设计与实验说明书
气动爬行机器人液压系统的设计与实验姓名:曲艳行课题组分工或贡献:曲艳行电气部分姚宇林机械部分孟昭亮、毕杰气动部分课程名称:液压传动系统、气压传动及控制、电液伺服与比例控制系统指导教师:赵静一2014年11月25日1.气动足式机器人简介移动机器人按移动方式大体分为两大类;一是由现代车辆技术延伸发展成轮式移动机器人(包括履带式);二是基于仿生技术的运动仿生机器人。
运动仿生机器人按移动方式分为足式移动、蠕动、蛇行、游动及扑翼飞行等形式,其中足式机器人是研究最多的一类运动仿生机器人。
自然环境中有约50%的地形,轮式或履带式车辆到达不了,而这些地方如森林,草地湿地,山林地等地域中拥有巨大的资源,要探测和利用且要尽可能少的破坏环境,足式机器人以其固有的移动优势成为野外探测工作的首选,另外,如海底和极地的科学考察和探索,足式机器人也具有明显的优势,因而足式机器人的研究得到世界各国的广泛重视。
现研制成功的足式机器人有1足,2足,4足,6足,8足等系列,大于8足的研究很少。
曾长期作为人类主要交通工具的马,牛,驴,骆驼等四足动物因其优越的野外行走能力和负载能力自然是人们研究足式机器人的重点仿生对象。
因而四足机器人在足式机器人中占有很大的比例。
长期从事足式机器人研究的日本东京工业大学的広濑茂男等学者认为:从稳定性和控制难易程度及制造成本等方面综合考虑,四足机是最佳的足式机器人形式,四足机器人的研究深具社会意义和实用价值。
2.气动爬行机器人机械原理2.1 机械结构图2.1为六足爬行机器人的机械结构的三维示意图,主要由汽缸提供动力,铝板制作的双层三角和两组三足为支撑,可实现前进、后退、左转、右转、急停、复位的自由切换。
2.2 运动原理机器人的支撑:机器人6只足分别均分布在两个等边三角形的顶点上[4]。
机器人在行走过程中,两组足交替支撑。
两组足中的任一组三足可独立支撑起整个机器人身体,机器人重心始终落在A组或B组三足的三角形区域内,因此在平面爬行中没有倾覆的危险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!"
!""# $ %
机械制造 !" 卷 第 !#$ 期
等优点, 本 控 制 系 统 采 用 与 456 - #( 兼 容 的 芯 片 为了减小输入端对输出端的 ,)’/5#( 作为控制芯片。 干扰, 采用光电耦合器; 用交流电通过变压整流提供驱 动用稳定直流电压; 对单片机的微弱信号采用三极管 放大以驱动相应的电磁阀; 通过位置和障碍物检测反 馈实现机器人具有一定的智能性。 图 ’ 和图 / 分别给出 了控制系统框图和系统控制流程图。 车而产生的难度大、 成本高等难题, 而且提高了施工效 率和操作安全性, 降低了工人的劳动强度。 另外还可以 应用于其它拉索、 悬索和高空管道的相关维护与检测, 因而具有良好的实用价值。 目前, 该机器人因结构等条 件限制, 只适用直管爬行; 另外由于采用地面气源供 气, 爬行高度受到供气管长度的限制。 可以通过采用机 构自带储气罐的办法, 实现无缆能源供给。
输入信号放大电路是将单片机输出的微弱控制信 号进行电流放大, 以驱动相应的继电器, 通过继电器的 开合来控制各个电磁阀的动作。 一般情 况下 , 根据 实际 要求 通常 采用 功放 、 三极 由于继电器主要 管、 !-#./0 或 1230 进行电流放大。 是电压驱动型元件, 所需电流较小, 故本爬管机器人采 用三极管放大。 为保护三极管并增加系统的稳定性和 可靠性, 使用了 4" 灭弧回路吸收电磁阀导通瞬间产 图中二极管 生的火花。 输入信号放大电路如图 $ 所示, 用于吸收继电器断电时产生的瞬间高压以防止三极管 击穿。 为防止机器人运行超过极限位置并检测管外壁上 的障碍物, 机器人采用如图 5 所示的由双向行程开关组 成的位置和障碍物检测电路。 由图 5 可见, 机器人在管道外壁上正常爬行时, 行 程开关闭合, 输入单片机的为低电平; 安装于上下自锁 机构上的障碍物检测装置检测到障碍物时, 单片机将 出, 顶下橡胶球, 解除下端自 锁; 主气缸下端进气, 使得机 器人下端下行; 下行到位后, 下小气缸活塞杆收回, 下端自 锁, 上小气缸活塞杆伸出, 解 除上端自锁; 主气缸上端进 气, 机器人上端随着主气缸回 缩而下行, 回到初始状态, 完 成一个下行循环。
&
机器人本体的基本运动
上行时, 主气缸下端进气, 活塞杆伸出, 机器人上
端因受推力而解除自锁, 下端自锁, 使得机器人上端上 移; 上移到位后, 主气缸上端进气, 机器人上、 下端皆受 拉力, 上端自锁起作用, 下端自锁解除, 下端随着主气 缸的回缩而上移, 回到初始状态, 也即完成了一个上行 循环。 如此反复, 机器人就可以一步一步蠕动式上行 了。 运动过程如图 6所示。 下行的过程状态跟上行相似, 不过就是要加上、 下 小气缸的控制动作, 具体说就是: 下端小气缸活塞杆伸
本文介绍和研制的蠕动式管外爬行机器人实验表 明, 系统上行运动稳定, 速度约为 ($ 7 8 79:; 下行时因 要周期性解除上下自锁, 故运行速度约为 % 7 8 79:, 下 行时会有轻微的下滑, 但不会影响机器人的正常下行 该类机器人主要用 运动。 图($ 给出了机器人实物照片。 于斜拉索桥拉索的施工作业, 主要包括对缆索的表面 清洗、 探伤检测、 喷漆等作业。 通过使用爬管机器人, 可 以解决传统的在缆索顶部安装牵引装置来牵引运载小
& % ’ 控制系统 碍物检测反馈 电路等, 以保 证整个机器人 系统自动、 稳 定、 顺序地工
控制部分主要有光电耦合输出信
号电路、 输出信号放大电路、 变压整流电路及位置和障
!"
!""# $ %
机械制造 !" 卷 第 !#$ 期
研究・开发
作, 主控芯片采用 !"#$% 单片机。 从图 & 可以看出, 机器人的上升、 下降以及自锁机 构的自锁和解锁需要由电磁阀的吸放引起的气动回路 动作完成。 但是, 电磁阀的工作电流较大, 一般单片机 只能通过驱动继电器或功率放大的方法来驱动。 综 合考虑成本及其实现的难易程度, 本文采用经过光耦 隔离驱动继电器, 再由继电器驱动电磁阀的驱动方式。 这种隔离驱动的方法可以避免输出端对输入端产生的 反馈和干扰; 动态电阻小, 形成的低阻抗旁路可以很好 地抑止噪声; 而且光电耦合器耐用、 可靠性高、 响应速 度快。 图 ’给出了光电耦合输出信号电路。 电磁阀的驱动电压为 ("%& ), 因此需将 *"&&+ ) 市电变压、 整流、 稳压。 为保护电磁阀和增加系统的稳 定性, 增加了稳压管、 去噪滤波电容和电压波形平滑电 容。 其原理如图 , 所示。 检测到高电平。 单片机可以通过检测相应管脚上的输 入电平即可确定管壁上是否有障碍物以及是否已至管 道终点。
研究・开发
气动蠕动式管外爬行机器人的设计与实现
%
摘
毕道钦
%
李蓓智
%
张家梁
%
毛志敏
%
宋立博
要 2 利用机械自锁原理, 设计了一种气动驱动、 蠕动式爬行的管外机器人。 简要介绍其自锁实现原理, 详细介绍
了其机械本体结构和气动原理。 同时, 给出了光电耦合输出信号电路、 变压整流电路、 输入信号放大电路、 位置和障碍物检 测反馈电路以及 3!014-# 单片机控制系统总体框图和控制程序流程图。 关键词: 管外机器人 中图分类号: !5$)$ 蠕动爬行 气动 自锁 文献标识码: 3 文章编号: #666 7 )110 & $66- ’ 6% 7 66%0 7 6% 动、 液压、 气动, 近来出现了一些新的驱动方式, 如压电 晶体的冲击驱动 ( ) * 、 超磁致伸缩 & +,, ’ 驱动 ( - * 等, 不过 这些驱动方式一般都用于微型机器人, 且基本用在管 内机器人中。 考虑机器人的结构、 研制费用等因素, 决 定选用气压驱动。 气动具有气源方便、 气动系统简单、 清洁无污染等优点, 而且气动的速度调节方便易行。 本 机器人驱动装置主要包括 % 个主气缸及其相应的气动 回路装置。 机器人气动执行装置包括两部分, 一是用来夹持 管壁的自锁机构 ( 包括橡胶球、 斜面、 压缩弹簧等 ) , 二 是下行时用于解除自锁用的小气缸回路 ( 缸 #、 $、 % 为主 缸/、 气缸回路, 缸)、 -、 . 属于上气缸回路, 0、 1 属于下气 缸回路) 。 气动原理图如图$所示。 机械本体采用自锁原理设
#
机器人的基本组成
机器人系统主要由机器人机械本体、 气动装置和
控制系统组成。 & # ’ 机器人机械本体 计。 自锁机构主要包括弹簧、 橡胶球、 斜面等基本构件。 通常在重力作用下, 橡胶球紧压在自锁机构斜面和管 壁之间, 其与管壁间的静摩擦力使机器人停留在当前 位置而不下滑。 机器人在运动之前, 首先需要解除自锁。 向上运动 时, 下自锁机构保持自锁状态, 上自锁机构解除自锁, 主气缸充气使上自锁机构向上运动; 然后上自锁机构 自锁而下自锁机构解除自锁, 主气缸排气使下自锁机 构向上运动至气缸极限位置后下自锁机构自锁。 重复 如上过程即可使机器人以蠕动方式运动, 机器人向下 运动时的过程相反。 图#给出 了机器人本体机械结构原理 图。 & $ ’ 气动 装置 蠕动式 管外机器人的气动装置主要 由气动驱动、 气动执行两部 分组成。 驱动装置是用来 驱动机器人主体的装置。 常 用的驱动方式可以分为电
管外爬行机器人是机器人领域的一个主要研究分 支。 国外有代表性的有东京大学研制的关节型行走机 器人, 可沿水平或垂直的直管爬行, 能跨越法兰、 !型 管和 " 型管, 并可跨越平行管
"##
。 国内比较典型的有上
%# 海交通大学研制的斜拉桥缆索涂装维护机器人"$ 、 ,
可在各种斜度的缆索上爬行, 能完成缆索检测、 清洗等 工作, 并具有一定的智能性。 作者设计了一种基于自锁 原理、 气压驱动的蠕动式管外爬行机器人, 介绍了机械 本体、 气动回路、 控制系统的设计和实现过程。
’
控制系统框图及流 程图
因为单片机具有功能强、
体积小、 价格低、 易开发维护
机械制造 !" 卷 第 !#$ 期
!""# $ %
!"
研究・开发
航空物流中心系统动态心 系统 布置设计 文献标识码: , 文章编号: ($$$ - .//’ 0 1$$# 2 $3 - $$.$ - $3 航空物流中心规划与布置设计是航空物流中心建 设的一个重要组成部分 ? 它是指根据航空物流园区的 中图分类号: "#$%& ’( ; )*(’+
.
结
论
(
参考文献
* & *;<;=>9? " & *>@>? A & BCD9EF GH >E& 4GCD>:9<7 >:F 5; :H@;E ;I 4;J9EG K9LGE9:G 4>9:HG:>:CG M;J;H N9HD O>PQ );:R< 4GCD>:9<7 S 5 T & K@;CGGF9:R< ;I HDG (//# U:HG@>H9;:>E 5;:IG@G:CG ;: M;J;H9C< >:F ,VH;7>H9;:? W>R;Q>? X>L>:? (//#! ’#( Y ’#% 1 3 . 吕恬生 ? 张家梁 ? 罗均 & 气动蠕动式缆索爬升机器人的基本 : 结构 S X T & 机械与电子 ? 1$$$? ( 3) 3’ Y .( 张家梁? 吕恬生? 宋立博等 & 气动爬缆机器人气压分析与试验& : 上海交通大学学报 ? 1$$3 , 3+ ( () #. Y #+ )>=>D>@V U, *9H;<D9 Z, W;JVQV=9 [& 5D>@>CHG@9<H9C< ;I K9GP;GEGC\ H@9C O;C;7;H9]G 4GCD>:9<7 I;@ >: U: - L9LG 49C@; U:<LGCH9;: 4>CD9:G& K@;C ;I U^^^ %HD U:HG@:>H9;:>E 6Q7L;<9V7 ;: 49C@; 4>CD9:G >:F *V7>: 6C9G:CG 0 4*6 _ /# 2 ! (/3 Y (/’ # );<D9; "? *9FG79 *& ‘9>:H 4>R:GH;<H@9CH9]G ,EE;Q 0 ‘4, 2 ,LLE9C>H9;: H; 49C@; 4;J9EG M;J;H >< > 49C@; ,CHV>H;@ N9HD;VH K;NG@ 6VLLEQ 5>JEG<& U^^^ 49C@; ^EGCH@; 4GCD>:9C>E 6Q<HG7 , (//(: 1($ Y 1(# % 何立民 & 456 - #( 系列单片机应用系统设计 S 4 T & 北京航空 航天大学出版社, (//$ 0 编辑 作者单位: 东华大学机械工程学院 邮政编码: 上海・1$$$#( 收稿日期: 1$$.年($ 月 林 , 凡2