航空摄影测量第一章
摄影测量与遥感概论
摄影测量与遥感概论第一章绪论1.摄影测量:是利用光学或者数码摄影机获取的影像,经过处理以获取被摄物体的形状、大小、位置、性质和相互关系的一门学科。
分类:按距离远近:(1)航天摄影测量(2)航空摄影测量(3)地面摄影测量(4)近景摄影测量(5)显微摄影测量按用途:(1)地形摄影测量(2)非地形摄影测量按处理手段:(1)模拟摄影测量(2)解析摄影测量(3)数字摄影测量用途:(1)地形测量领域:各种比例尺的地形图、专题图、特种地图、正射影像图、景观图;建立各种数据库;提供地理信息系统和土地信息系统所需要的基础数据(2)非地形测量领域:生物医学;公安侦破;古文物、古建筑;建筑物变形监测2.摄影测量发展的三个阶段:模拟摄影测量(1851-1970);解析摄影测量(1950-1980);数字摄影测量(1970-现在)3.4D产品的含义:DLG(Digital Line Graphic 数字线划地图)DRG(Digital Raster Graphic 数字栅格地图)DEM(Digital Elevation Model 数字高程模型)DOM(Digital Orthpphoto Map 数字正射影像图)5.影像信息科学:是一门记录、存储、传输、量测、处理、翻译、分析和显示由非接触传感器获得的目标及其环境信息的科学、技术、和经济实体。
第二章单张航摄像片解析1.航空摄影测量的基本要求:(1)航摄倾角(相片倾角):摄影主光轴与铅垂方向的夹角α(α<3°)(2)摄影比例尺:航摄像片上的一段线l与地面上相应线段L之比视摄影像片水平、地面取平均高程时,像片上的线段l与地面上相应水平距L之比为摄影比例尺1 m =lL=fHf为摄影机主距,H为航高(3)像片的重叠度:当相邻的两张像片拍摄景区有重叠时,重叠部分占整张像片的比例要求:航向重叠度(航线相邻两张照片的重叠度)p x>53% (60%~65%)旁向重叠度(相邻航线像片的重叠度)p y>15% (15%~30%)(4)航线弯曲:把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上而呈现为弯弯曲曲的折线,称为航线弯曲。
无人机航测技术与应用课件:航空摄影测量基础

航摄像片的特点
当像片倾斜、地面起伏时,地面点在航摄像片上构像相对于理想 情况下的构像所产生的位置差异称像点位移
航摄像片与地形图的区别 1)投影方式的不同:地形图为正射投影,航摄像片为中心投影
AC B
c ab
c ba S
B
A
C
2)航片存在两项误差:像片倾斜引起的像点位移,地形起
伏引起的像点位移
s
5.2双像解析摄影测量
5.2.1共线方程 4共线方程
X
Y
Z1
X A X s YA Ys Z A Zs
X
Y
Z
1
X A
YA ZA
Xs Ys Zs
X x a1 a2 a3 x
Y Z
R y f
bc11
b2 c2
b3 c3
y f
5.2双像解析摄影测量
y
RT
Y
a2
b2
c2
Y
f Z a3 b3 c3Z
其中R是一个正交矩阵,它由9个方向余弦构成
5.2双像解析摄影测量
5.2.1共线方程 3空间直角坐标系的旋转变换
a1 a2 a3 cos Xx cos Xy cos Xz
R b1
b2
b3
c
osYx
cosYy
摄影测量学(武大)01袁修孝ppt课件

摄影测量学:定义
各种类型 传感器
被摄物体 影像
通过量测和 解译过程
自然物体及其环境的可靠信息
DEM
DLG
DRG
DOM
P31 摄 影 经 纬 仪
ppt精选版
9
RC30 框幅式航摄pp仪t精选版
10
ADS40 数字航摄仪
ppt精选版
11
摄影测量学:定义
各种类型 传感器
被摄物体 影像
通过量测和 解译过程
《摄影测量基础》第一章
绪论
袁修孝 教授
ppt精选版
武汉大学
遥感信息工程学院1
主要内容
一、摄影测量学的定义与任务 二、摄影测量学的发展历程 三、本课程的主要内容
ppt精选版
2
§1.1 摄影测量学的定义与任务
定义 分类 平台 特点 任务
ppt精选版
3
A(X、Y、Z)
Z
Y
1
O1
2
2
X
通过摄影,进行测量
•DPW
数字线划地图 数字高程模型 数字影像地图 数据库
ppt精选版
自动量测 和解译
自动记录
42
VirtuoZo 数字摄影测量系统
Crystal eyes 3-D mouse
JX-4A数字摄影测量工作站
像素工厂
ppt精选版
45
摄影测量三个发展阶段的特点
发展阶段 原始资料 投影方式
仪器
操作方式
旋转矩阵、空间坐标变换、共线条件方程、单片空 间后方交会
与量测
第四章 立体观察与立体量测 (6学时)
人体的立体视觉、人造立体视觉、像对的立体观察
像点坐标量测及系统误差改正
航空摄影测量的基本知识课件

对拍摄的影像进行预处理,如去噪、 色彩校正等。
飞行作业
按照规划的航线进行摄影,注意天气 变化和飞行安全。
数据处理与分析
影像匹配与拼接
将不同影像进行匹配和拼接 ,形成完整的地形图。
三维模型构建
利用拼接后的影像进行三维 重建,生成数字高程模型( DEM)。
测量分析
根据项目需求进行各种测量 分析,如地形坡度、建筑物 高度等。
结果输出与应用
成果输出
生成航空摄影测量成果,如数字高程 模型、正射影像等。
应用领域
广泛应用于城市规划、土地调查、灾 害监测等领域。
04 航空摄影测量的精度与误差来源
精度分析
像片控制点测量精度
01
像片控制点是航空摄影测量的基础,其测量精度直接影响整个
测量成果的精度。
空中三角测量精度
02
空中三角测量是确定像片位置和姿态的关键步骤,其精度对最
合成孔径雷达技术
合成孔径雷达是一种通过飞机或卫星搭载的雷达系统获取地面信息的手段,具有全天候、 全天时、远距离探测等优点,在军事侦察、地形测绘、灾害监测等领域有广泛应用。
智能化与自动化
自动化数据处理
随着计算机技术的发展,航空摄 影测量数据的自动化处理成为可 能,包括自动定位、自动匹配、 自动拼接等,大大提高了数据处
理效率和精度。
智能化目标识别
通过人工智能和机器学习等技术 ,实现对航空影像中各类目标的 自动识别和分类,为后续的数据
分析和应用提供便利。
自动化建模技术
利用自动化建模软件和算法,根 据航空摄影测量数据快速构建三 维模型,为城市规划、建筑设计 和景观分析等领域提供可视化支
持。
多源数据融合与综合应用
附录C-航空摄影测量
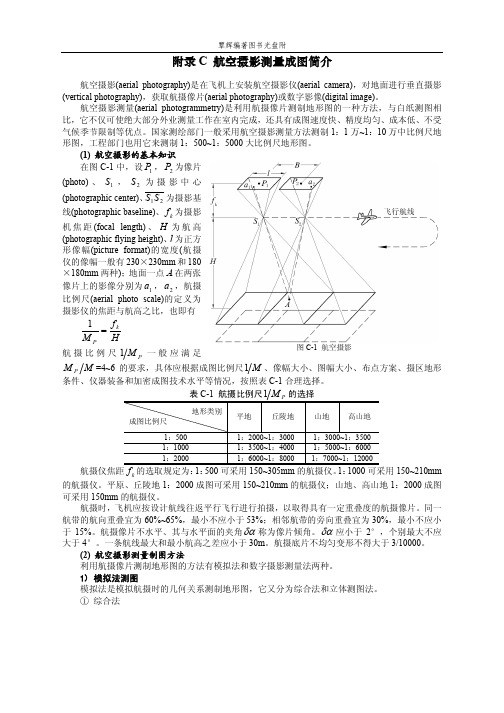
附录C 航空摄影测量成图简介航空摄影(aerial photography)是在飞机上安装航空摄影仪(aerial camera),对地面进行垂直摄影(vertical photography),获取航摄像片(aerial photography)或数字影像(digital image)。
航空摄影测量(aerial photogrammetry)是利用航摄像片测制地形图的一种方法,与白纸测图相比,它不仅可使绝大部分外业测量工作在室内完成,还具有成图速度快、精度均匀、成本低、不受气候季节限制等优点。
国家测绘部门一般采用航空摄影测量方法测制1:1万~1:10万中比例尺地形图,工程部门也用它来测制1:500~1:5000大比例尺地形图。
(1) 航空摄影的基本知识在图C-1中,设1P ,2P 为像片(photo)、1S ,2S 为摄影中心(photographic center)、21S S 为摄影基线(photographic baseline)、k f 为摄影机焦距(focal length)、H 为航高(photographic flying height)、l 为正方形像幅(picture format)的宽度(航摄仪的像幅一般有230×230mm 和180×180mm 两种);地面一点A 在两张像片上的影像分别为1a ,2a ,航摄比例尺(aerial photo scale)的定义为摄影仪的焦距与航高之比,也即有H f M k P =1 航摄比例尺P M 1一般应满足M M P =4~6的要求,具体应根据成图比例尺M 1、像幅大小、图幅大小、布点方案、摄区地形条件、仪器装备和加密成图技术水平等情况,按照表C-1合理选择。
航摄仪焦距k 的选取规定为:1:500可采用150~305mm 的航摄仪。
1:1000可采用150~210mm 的航摄仪。
平原、丘陵地1:2000成图可采用150~210mm 的航摄仪;山地、高山地1:2000成图可采用150mm 的航摄仪。
航空摄影测量实施课件
行业发展趋势
标准化与规范化
随着航空摄影测量技术的广泛应 用,行业将制定更加严格的标准 化和规范化要求,确保数据质量
和应用效果。
数据共享与合作
未来航空摄影测量行业将加强数据 共享和合作,促进不同领域之间的 信息交流和资源整合。
跨界融合与创新
航空摄影测量将与地理信息系统、 遥感、卫星导航等技术融合发展, 推动跨界创新和应用拓展。
航空摄影测量实施课件
CONTENTS 目录
• 航空摄影测量概述 • 航空摄影测量技术 • 航空摄影测量实施流程 • 航空摄影测量质量控制 • 航空摄影测量案例分析 • 航空摄影测量未来发展
CHAPTER 01
航空摄影测量概述
定义与特点
定义
航空摄影测量是指利用航空飞行器搭载摄影设备对地面进行 拍摄,通过获取高清晰度的地面影像,结合测量技术、计算 机技术和相关软件,对地面的地形、地貌、地物等进行测量 和绘图的工程。
CHAPTER 06
航空摄影测量未来发展
技术创新与进步
无人机技术的普及
01
无人机具有灵活、快速响应的特点,未来将广泛应用于航空摄
影测量领域。
高分辨率传感器
02
随着传感器技术的发展,未来航空摄影测量将能够获取更高分
辨率的影像数据,提高测量精度。
人工智能与机器学习
03
人工智能和机器学习技术将应用于航空摄影测量中,实现自动
在灾害发生后,通过航空摄影测量技术, 能够快速获取灾区的地形地貌、建筑物损 毁情况、道路交通状况等信息。这些信息 有助于了解灾区的受灾程度和救援需求, 为灾害救援和灾后恢复提供决策依据,帮 助救援人员更好地制定救援计划和分配救 援资源。
考古研究案例
航空摄影测量
航空作业名称
01 基本原理
03 相关技术
目录
02 优点 04 测量方法
05 具体工作
07 未来发展
目录
06 我国发展情况
航空摄影测量(aerial photogrammetry)指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制 点测量、调绘和立体测绘等步骤,绘制出地形图的作业。
测量方法
20世纪30年代以来,航空摄影测量的测图方法主要有3种,即综合法、全能法和分工法(或称微分法)。
航空摄影测量的综合法是摄影测量和平板仪测量相结合的测图方法。地形图上地物、地貌的平面位置由像片 纠正的方法得出像片图或线划图,地形点高程和等高线则用普通测量方法在野外测定。它适用于平坦地区的大比 例尺测图。
③综合法测图。主要是在单张像片或像片图上用平板仪测绘等高线。
航测内业工作包括:
①测图控制点的加密。以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建 立单航线模拟的空中三角,进行控制点的加密工作。20世纪60年代以来,模拟法空中三角测量逐渐地被解析空中 三角测量代替(见空中三角测量)。
航空摄影测量的全能法是根据摄影过程的几何反转原理,置立体像对于立体测图仪内,建立起所摄地面缩小 的几何模型,借以测绘地形图的方法。在立体测图仪上安置像片时依据内方位元素,目的是使恢复后的投影光束 同摄影光束相似(也可在一定条件下变换投影光束)。由于像对的相对定向过程中并未加入控制点,只利用了像 对内在的几何特性,所以建立的几何模型的方位是任意的,模型的比例尺也是近似值,因此必须通过绝对定向才 能据以测图。
全能法测图的仪器是立体测图仪。
具体工作
航空摄影测量需要进行外业和内业两方面的工作。
(完整word版)航空摄影测量
航空摄影测量一.前言及单张相片的航测解析1.摄影测量学:利用各种非接触型的传感器,获取模拟的或数字的影象,然后解析和数字化提取所需要的信息,在空间信息系统里数字的加以存储,管理,分析和表达,再通过可视化和符号化形成产品2.摄影比例尺:航摄相片上的一段线的长度l,与实际地面上的相应线段长度L的比,1/m=l/L ,此时视相片为水平,地面取平均高程。
也等于摄象机主距f和平均地面高H的比,即1/m=f/H 3.空中摄影测量采用竖直摄影方式,即摄影瞬间摄象机的铅垂线垂直于地面,偏离垂线夹角应小于3度,夹角称相片斜角4.航向重叠:同航向要求重叠度60%。
旁向重叠:相邻航带间重叠度要求24%。
5.航摄影象是地物上的各点通过航摄机的物镜投射到相片上的一点,称为中心投影。
6.摄影测量的几何处理任务是通过相片上像点的位置确定相应地面点的空间位置,这就需要坐标转换来确定地面点.描述像点位置的坐标系为相方坐标系,描述地面点位置的坐标系为物方坐标系。
7.用摄影测量的方法研究地物的几何和物理信息时,必须建立该物体与相片之间的数学关系,首先需要确定的是摄影瞬间摄影中心与相片在地面坐标系中的位置和姿态。
内方位元素:表示摄影中心与相片之间相关位置的参数外方位元素:表示摄影中心和相片在地面坐标系中的位置和姿态的参数。
8.像点偏移:地面点在相片上的投影因相片倾斜或地面不平而移位或多边形形变.二.双像解析摄影测量1.人造立体视觉需要满足的条件:两张相片必须是两个位置对同一景物摄取的相对。
每只眼睛只能观察一张相片。
两相片上的同名景物连线必须与眼基线大致平行。
两相片的比例尺相近(差别<15%),否则需要用zoom模块进行调节。
2.用解析的方法处理立体相对(定向—恢复地面目标的空间坐标),常用方法:①利用相片的空间后方交会与前方交会来解求地面目标的空间坐标(绝对坐标)②利用相对的内在几何关系,进行相对定向,建立与地面相似的立体模型,计算出模型点的空间坐标,再通过绝对定向,将模型进行平移,旋转,缩放,以纳入到规定的地面坐标系中,解析出地面目标的绝对空间坐标。
第一章绪论一、摄影测量与遥感的定义与任务1、摄影测量与遥感定义...
第一章 绪论一、摄影测量与遥感的定义与任务1、摄影测量与遥感定义摄影测量与遥感乃是对非接触式传感器系统获得的影像及其数字表达进行记录量测和解译,从而获得自然物体和环境的可靠信息的一门科学和技术。
传统的摄影测量学是利用光学摄影机摄影的像片,研究和确定所摄物体的形状、大小、性质及其空间位置的理论、技术和方法的一门学科。
内容包括 : 影像信息获取 影像信息处理影像信息表达 影像信息应用2、摄影测量目前的主要任务是:测制各种比例尺的地形图和专题图;建立地形数据库;为各种地理信息系统和土地信息系统提供基础数据。
3、主要特点:1).影像记录目标信息客观、逼真、丰富;2).测绘作业无需接触目标本身,不受现场条件限制;3).可测绘动态目标和复杂形态目标;4).影像信息可永久保存、重复量测使用;二、摄影测量学的分类●分类原则与方法基本要素: 目标、图像、信息●按被测目标分(按用途分):地形摄影测量 (地形图)非地形摄影测量(其他用途)●按获取目标的距离分(按距离分):航天摄影测量(<160Km) ;航空摄影测量(2Km~30Km);地面摄影测量(100m~300m);近景摄影测量(<100m) ;显微摄影测量按图像类型分:光学图像;雷达摄影测量;双介质摄影测量;X射线摄影测量按图像处理方式分(按技术方法分):模拟摄影测量(1900~1960年);解析摄影测量(1950~1980年) ;数字摄影测量(1980年~~~)三、摄影测量学的发展历史[参考资料]●1839年尼普斯和达盖尔发明摄影术。
●1851~1859年,法国陆军上校劳赛达特提出和进行交会摄影测量,这被称为摄影测量学的真正起点。
这一阶段主要用于建筑物的摄影测量。
●1858年,纳达通过气球获取了第一张地面的空中照片。
●二十世纪初,发明了立体观察方法。
1901年,立体坐标量测仪问世。
由于飞机尚未发明,主要用于地面摄影测量。
●1903年,莱特兄弟发明飞机,使航空摄影测量成为可能。
航空摄影测量基础及应用
叫做高程异常。
3 共线方程:
在摄影测量学中,按照投影中心、像点和相应的地面点的理想共线关系建立的数 学模型,称为共线条件方程
内方位元素: X0 Y0 f 外方位元素: XS YS ZS
Ψωҡ
3航航测测生产生流产程 流程
工作区实地踏勘, 选择起降场地并适合架设基站
空三成果
特征点线 采集
特征数据 构TIN
内插 DEM
质量
否
检查
DEM成果
DLG 编辑
4) DOM制作
传统正射:经过数字高程模型(DEM)采用数字微分纠正、镶 嵌得到正射影像。
影像资料
空三成果
高程模型
正射纠正 影像匀色 影像镶嵌
DOM
质量 检查
真正射影像:
是利用数字表面模型DSM,采用数字微分纠正技术, 改正原始影像的几何变形,保证影像上每点都是完全
常用的高程系统有大地高系统、正高系统 和正常高系统
大地高系统H:以参考椭球面为基准面的
高程系统,也称为椭球高。
正高系统Hg:以大地水准面为基准面的
高程系统
正常高系统Hr:是以似大地水准面为基
准的高程系统。 我国采用的是正常高系统,主要有1956年 黄海高程系统和1985国家高程基准 工程建设主要采用的是1985高程基准
2)UTM:等角横轴割圆柱投影
将北纬84度至南纬80度之间按经度分为60个带,每带6度.从西经 180度起算
3)地方独立坐标系:基于限制变形,以及方便实用科学的目的,
在许多城市和工程测量中,常常会建立适合本地区的地方独立坐标 系。
4)坐标系转换:
同一椭球下的坐标转换是严密的。不同椭球下的坐标转换是不严密 的。坐标转换方法:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
填写飞行日志
飞行质量 摄影质量
三 航空摄影主要工作环节
1、航摄协议书的拟定
⑴划定需航摄的具体区域范围 ⑵规定航摄比例尺 ⑶规定航摄像片应达到的质量要求 ⑷规定航摄仪类型及焦距、像幅的规格 ⑸规定移交成果的方式、内容和期限 ⑹ 规定甲、乙双方的责任和费用
7、摄影测量的作业流程
8、 地形图的内容
地形图精确、详尽地反映了地表面的物体和现象,内容 多而复杂,但总的来说,一幅地形图的基本内容包括数学要 素、自然地理要素、社会经济要素和注记整饰要素四个部分。
1、数学要素 (1)地理坐标网(经纬线) (2)平面直角坐标网 (3)测量控制点 (4)比例尺
2、自然地理要素 (1)水系 (2)地貌 (3)植被、土质
航空摄影
安装在航摄飞机上的航摄 仪从空中一定角度对地面 物体进行摄影,飞行航线 一般为东西方向,要求航 线相邻两张像片应有60% 左右的重叠度,相邻航线 的像片应有30%左右的重 叠度,航摄机在摄影曝光 的瞬间物镜主光轴保持垂 直地面。
数字高程模型
数字线化图 数字栅格图
数字正射影像
一 基本概念
12、遥感分类
13、摄影测量与遥感的关系
14、摄影测量与遥感的任务
15、摄影测量与遥感特点
航空摄影测量
基本概念 航空摄影测量的作业过程 航空摄影主要工作环节 航摄成图资对航摄资料及大地测
量的要求 航摄相片的基本特性 航摄成图方法的选择
一 基本概念
1.航空摄影测量是指从飞机上对地面进 行摄影,根据航摄像片所提供的图像 信息,在特定的航测仪器上测制各种 比例尺地形图的一种摄影测量技术。
1:5万、1:1万:国家、省级基本地形图,它们常 用于大型工程(如水利、水电、铁路、公路)的初 步勘测设计;
1:5千、1:2千:一般为大型工程设计用图; 1:2千、1:1千、1:500 :主要应用于城镇的规划、
土地与房产管理。
6、摄影测量的产品——4D产品
❖ DRG(Digital Raster Graphic)
间
数字栅格图
接
产
❖ DLG (Digital Line Graphic)
品
数字线划图
直
❖ DOM(Digital Orthophoto Map)
接
数字正射影像图
产
❖ DEM(Digital Elevation Model)
品
DSM (Digital Surface Model) 数字高程模型、数字表面模型
前方交会解算地面点坐标
摄影比例尺的确定
航摄分区的划分
基准面高度的确定
航
航线的敷设
空
航摄基本参数的计算
摄
航摄季节和时间的选择
影 的
航摄仪的选择与检定
流
航摄胶片的选择与测定
程
配置冲洗药液
胶片冲洗
像片印制
航摄准备 航摄设计 航空摄影 摄影处理 质量检查
成果提交
摄区基本情况分析 确定航摄设计用图
航摄空域申请 航空摄影技术设计
航测内业是指在室内依据航测外业等成果,利用一定的 航测仪器和方法所完成的那部分航测工作。航测内业主要 包括控制点加密(即电算加密或称解析空中三角测量)、 像片纠正和立体测图三大项工作。
航空摄影测量的作业过程
航空摄影
航空摄影Байду номын сангаас
航测外业
像控测量获取 GCPs
内业加密 测绘产品
解算像片外方位元素 Xs, Ys, Zs, , ,
4、摄影测量的发展历程
从1851年法国陆军上校劳赛达提出并进行交会摄影测 量算起,摄影测量学已经走过了160多年的历程:
➢模拟摄影测量(1851-1960) ➢解析摄影测量(1950-1980) ➢数字摄影测量(1970-现在)
5、摄影测量的主要任务
测绘各种比例尺的地形图。主要有1:5万、1:1 万、1:5千、1:2千、1:1千、1:500 ;
9.摄影基线 航向相邻两个摄影站间的距离
P1 S1
S
P2 S2
E S:摄影基线
二 航空摄影测量的作业过程
⒈航空摄影 在专业飞机上安装航空摄影机,通过对地面的连续摄
影,以获取所摄地区的原始航摄资料或信息。主要为航测 提供基本的测图资料——航摄像片(或影像信息)以及一 些摄影数据等。 ⒉航测外业
主要包括像片控制测量和像片调绘两大项内容。它是 为了保证航测内业加密或测图的需要在野外实地进行的航 测工作。 ⒊航测内业
2、摄影测量分类 摄影测量— 分类
3、摄影测量应用领域
摄影测量— 应用领域
地形测量领域
各种比例尺的地形图、专题图、 特种地图、正射影像地图、景观图 制作 建立各种专题数据库 提供地理信息系统和土地信息系 统所需要的基础数据
3、摄影测量应用领域
摄影测量— 应用领域
非地形测量领域
生物医学 公安侦破 古文物 古建筑 变形监测 军事侦察 矿山工程
3、社会经济要素 (1)居民地及设施 (2)道路 (3)境界 (4)管线
4、注记整饰要素
9、航空摄影测量作业流程
10、遥感定义
遥感(Remote Sensing)是通过非接触传感器遥测 物体的几何与物理特征的一门学科。
11、遥感的产生
➢1957年 第一颗人造卫星发射升空 ➢1962年 “遥感(Remote Sensing)”名词诞生 ➢1972年 美国陆地资源卫星(Landsat)发射成功, 星上搭载了多光谱扫描仪(MSS)等新型传感器,获得 了大量的地球表面数字影像
2.机械框标是指贴附框每边的中点各设 有一个框标。 3.光学框标是指在贴附框的四个角隅的 光标。 4.框标是航测中建立像平面坐标系,进 行像点坐标量测以及对像片进行变形 改正的重要依据。
一 基本概念
5.主距是指像平面到物镜后主平面之间 的距离。 6.航高是指摄影时航摄仪镜头中心到某 一地面的垂直距离。 7.绝对航高是指航摄仪镜头中心到大地 水准面的垂直距离。 8.相对航高是指航摄仪镜头中心到某一 基准面的垂直距离。
第一章:航空摄影测量外业概论
摄影测量与遥感的相关基础知识
1、摄影测量的基本概念
摄影测量学(Photogrammetry)是利用光学摄 影机获取的像片,研究和确定被摄物体的形状、大 小、位置、特性及其相互关系的一门学科。
1988年ISPRS在日本京都第16届大会上对摄影测量 与遥感的定义:摄影测量与遥感是对非接触传感器 系统获得的影像及其数字表达进行记录、量测和解 译,从而获得自然物体和环境的可靠信息的一门工 艺、科学和技术。