数字航空摄影测量的相机检校
中国测绘科学院数字航摄仪检定2023.2

数字航摄仪(相机)检测系统一、简介作为航空摄影测量的核心——数字航摄仪(相机)是进行自然资源调查、监测的重要手段之一,已经广泛应用自然资源生产领域。
由于数字航摄仪(相机)产品种类繁多、性能各异,良莠不齐,为了加强数字航摄仪(相机)产品质量控制与管理,保证测量结果的准确可靠,国家测绘地理信息计量站(国家光电测距仪检测中心)建立我国首个数字航摄仪(相机)检测系统。
主要由室内光学检测实验室、室内几何检测实验室和野外空对地(几何)检测场和野外空对地(影像)检测场构成。
数字航摄仪(相机)的检测系统,确保了数字航摄仪(相机)测量成果准确可靠和量值统一,并可以溯源至国家计量基准,为数字航摄仪(相机)的检测和质量评价提供了技术支撑。
1、实验室检测光学检测实验室可开展数字航摄仪(相机)的光学分辨率、透过率、杂光系数以及信噪比等项目检测。
几何检测实验室可开展数字航摄仪(相机)的内方位元素、畸变参数、畸变精度等项目检测。
图1 畸变差检测仪图2 聚焦式光管阵列装置2、野外检测场检测野外检测场可开展各类航摄仪(相机)几何精度检测和辐射性能检测。
几何精度检测包括空中三角测量精度检测和立体像对摄影测量精度检测。
辐射性能检测包括动态摄影分辨率、线性度和信噪比等。
空对地(几何)检测场东西宽约7km,南北长约3km,区域气象条件稳定,地形地貌代表性好,包含山地、丘陵和平地等,地形最大高差约在400m左右,空域飞行不受约束的便利条件。
空对地(影像)检测场大小约为10000m2,铺设有满足光谱特性设计要求的永久性标志和各种不同分辨率的靶标,满足数字航摄仪(相机)的辐射性能检测的需要。
图3 空对地(几何)检测场(效果图)图4 空对地(影像)检测场(俯瞰照片)二、特点(1)室内外一体化:独特的实验室检测方法结合野外检测场检测验证,形成室内外检测和验证一体化的检测体系。
(2)产品全覆盖:可实现单面阵、多面阵、多拼和倾斜摄影数字相机高精度检测,适用于不同焦距的数字航摄仪(相机)检测需求。
数字航摄仪(五镜头单镜头)校准方法

作业指导书数字航摄仪(五镜头/单镜头)校准方法目录1、范围 (3)2、规范性引用文件 (3)3、术语和计量单位 (3)4、概述 (4)5、计量性能要求 (4)6、通用技术要求 (4)7、计量器具控制 (5)7.1 主要校准器具 (5)7.2 校准场位置及范围 (5)7.3 校准场控制点及检查点要求 (5)8、校准场校准操作步骤 (5)8.1 校准前准备 (5)8.2 空中三角测量精度 (6)8.3动态影像分辨率精度 (7)9、校准结果的不确定度评定................................................. 错误!未定义书签。
9.1数字航摄仪空中三角测量精度不确定度评定................................. 错误!未定义书签。
9.2、数字航摄仪动态影像分辨率不确定度评定 ................................. 错误!未定义书签。
附件1:空中三角测量精度校准结果示例. (7)附件2 量值溯源图....................................................... 错误!未定义书签。
数字航摄仪校准方法1、范围本指导书适用于数字航摄仪(包括数字相机)的校准。
其中,空对地校准适用于所有类型的数字航摄仪(包括数字相机),光学航摄仪(包括光学相机)的校准可参照执行。
2、规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
JJG827分辨力板JJG(测绘)3401-2016 数字航摄仪检定规程JJF 1059.1 国家计量技术规范:测量不确定度评定与表示3、术语和计量单位以下术语和定义适用于本文。
1 光电成像器件photoelectronic imaging device利用光电效应将可见或非可见的辐射图像转换或增强为可观察、记录、传输、存储以及可进行处理的图像的器件系列总称。
航摄测量中的摄影机校正和立体分析

航摄测量中的摄影机校正和立体分析在航摄测量领域中,摄影机校正和立体分析是非常重要的步骤。
摄影机校正是指对航摄成像过程中产生的畸变进行校正,以保证获取准确的图像数据。
而立体分析则是利用航摄获取的立体影像数据进行地物的测量和三维模型的生成。
本文将就航摄测量中的摄影机校正和立体分析进行简单的介绍。
1. 摄影机校正1.1 摄影测量原理摄影测量是利用航空或航天平台上的摄影机对地面进行间接测量的技术。
它的原理是通过摄影机将地面上的点投影到成像平面上形成影像,再根据几何关系进行计算。
在这个过程中,摄影机的内外参数需要进行校正以消除畸变。
1.2 内参数校正内参数是指摄影机自身的参数,包括焦距、主点位置、畸变系数等。
校正摄影机的内参数是为了使摄影机能够准确地对地面点成像。
内参数校正一般采用标定板或辅助器具,通过拍摄特定的标定点或标定板进行计算和调整。
1.3 外参数校正外参数是指摄影机相对于地面坐标系的姿态参数,包括摄影机的位置和姿态信息。
外参数校正的目的是确定摄影机的相对位置和姿态,以便在计算过程中准确地转换成像平面坐标为地面坐标。
2. 立体分析2.1 立体像对的获取立体分析需要通过摄影测量技术获取一对具有重叠区域的立体影像,即立体像对。
立体像对可以通过航摄平台自动获取,也可以通过数字影像处理技术进行匹配和构建。
2.2 匹配和视差计算匹配是指确定立体影像对中对应点的过程。
通过分析立体影像中的特征点,利用匹配算法确定对应点的位置,进而计算视差。
视差是两幅影像中对应点的像素偏移量,它代表了地面点的深度信息。
2.3 立体重建在确定对应点的位置和计算视差后,就可以进行地物的三维重建。
通过匹配点之间的视差和航摄参数,可以计算出地物的高程、坐标等信息。
利用这些信息,可以进一步生成地物的三维模型,为地理信息系统、城市规划等领域提供支持。
3. 应用前景摄影机校正和立体分析在航摄测量领域具有广泛的应用前景。
在资源环境调查、地质勘查、城市规划等领域,摄影测量可以提供高精度的地理信息数据,为科学研究和决策提供依据。
航测.No4航测关键点——相机检校参数的获取与优化
航测.No4航测关键点——相机检校参数的获取与优化前言拖了两个月的航测系列,终于来填坑了= =航测第4期,测绘营地为大家详细讲解一下影响航测精度的关键所在——相机检校参数的获取与优化。
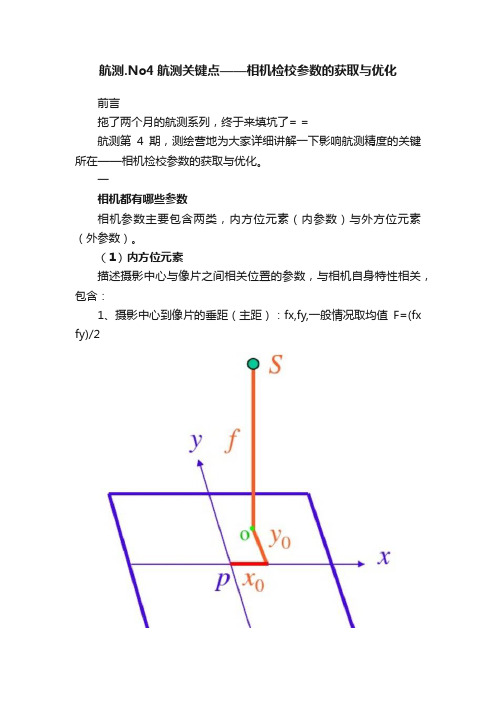
一相机都有哪些参数相机参数主要包含两类,内方位元素(内参数)与外方位元素(外参数)。
(1)内方位元素描述摄影中心与像片之间相关位置的参数,与相机自身特性相关,包含:1、摄影中心到像片的垂距(主距):fx,fy,一般情况取均值F=(fx fy)/22、像主点在框标坐标系中的坐标(主点位置):x0,y03、径向畸变参数:k1,k2,k34、切向畸变参数:p1,p2(2)外方位元素表示摄影中心和像片在空间坐标系中的位置和姿态,与像片拍摄时所处的空间条件有关,包含1、相机位置,即照片中心在世界坐标系中的空间坐标:X,Y,Z2、相机姿态,即相对于航线方向,照片的三个姿态角:航偏角、俯仰角、横滚角问:航测处理时,我们需要重点关注的是哪些?答:焦距F、主点位置x0,y0、径向畸变参数k1,k2,k3、切向畸变参数:p1,p2二如何简单地获取相机参数对于精灵4RTK来说,出厂时已经自带一个检校值,会存储在拍摄的每一张照片中。
为此,为了获取某精灵4RTK相机出厂检校参数,我们只需要利用一个小工具【精灵4RTK相机检校参数解析器】,任意读取一张该相机拍摄的照片即可。
该工具可在公众号后台回复【相机参数】获取。
对应第一节我们讲到的相机参数分类,我们可以看到以下信息:直接复制使用对应参数即可。
但这个小工具仍有一些不足,如:焦距值不是平均值,而是默认取的Fx的值;像元尺寸不够精确:应为2.41左右三如何详细查看与计算相机参数我们将任意一张照片用写字板的方式打开(记事本打开会比较卡),搜索【DewarpData】,然后就可以看到相机的检校参数信息如下:3707.970000000000,3696.130000000000,-8.520000000000,-11.610000000000,-0.271195000000,0.116523000000,0.000629533000,-0.000143233000,-0.0414********需要注意的是,相机参数的存放顺序为:fx,fy,△x0,△y0,k1,k2,p1,p2,k3(其中,fx,fy,△x0,△y0的单位均为像素)然后,我们将这些原始的参数作一些简单计算:(照片分辨率为5472*3648的情况下)F=(fx fy)/2=(3707.97 3696.13)/2=3702.05像素或者F=3702.05像素*2.41微米=8.92194毫米(其中,2.41为一个像素的尺寸大小,具体由来可参考下文:航测.No1 | 如何计算一张大疆精灵4RTK照片拍摄的地面实际大小)x0=5472/2 △x0=5472/2 (-8.52)=2727.48y0=3648/2 △y0=3648/2 (-11.61)=1812.39k1=-0.271195k2=0.116523k3=-0.0414261p1=0.000629533p2=0.000143233在Pix4D、ContextCapture等软件中,均按照以上参数输入保存即可。
数字航空摄影测量的相机检校
文章编号:049420911(2005)1120041202中图分类号:P204 文献标识码:B数字航空摄影测量的相机检校张建霞1,2,3,王留召2,3,4,刘先林3,李天子2,3,郭 辉2,3(1.西安科技大学,陕西西安710054;2.河南理工大学,河南焦作454001;3.中国测绘科学研究院,北京100039;4.昆明理工大学,云南昆明690053)C amera C alibration for Digital Air SurveyZH ANGJian 2xia ,W ANGLiu 2zhao ,LI U X ian 2lin ,LI T ian 2zi ,G UO Hui摘要:介绍数字航空摄影测量中数字相机检校的理论与方法,主要包括检校场的建立、检校的数学模型及解算和检校结果的验证等内容。
通过实例验证与分析得出结论,为数字航空摄影测量系统研究的后续工作提供基础性的保证。
关键词:数字影像;相机检校;检校参数;航空摄影测量 收稿日期:2005204205基金项目:河南省科技攻关资助项目(0524220043)作者简介:张建霞(19752),男,江苏淮安人,讲师,主要从事摄影测量教学和研究工作。
一、引 言目前国内航空摄影测量仍然大量使用进口的模拟航空摄影相机,不仅价格昂贵,要使用胶片,还要用昂贵的仪器进行胶片影像数字化,而且胶片动态范围小(6~7bit ),航摄质量低,测图周期长,影响整个行业进步。
另外,近几年国家每年有1亿多元的航空摄影任务,以国家、集体,甚至个人等形式的航摄队伍,都难以完成,只有发展新的数字航空摄影测量系统,才能适应这一需要。
航空摄影用数字相机是数字航空摄影测量的关键设备,而数字相机不是专门为摄影测量设计的,是非量测相机,其内方位元素无法直接测定,也存在较大的光学畸变差。
因此,数字相机的严格检校是数字航空摄影测量的基础性工作之一。
二、数字相机检校1.数字相机及其检校数字相机是由传统相机演变而来,仍使用传统的光学系统,只是图像信息的载体发生了变化,在原有胶片的位置换上了CC D 芯片。
航空摄影测量规范 (2)
航空摄影测量规范
航空摄影测量是利用航空摄影技术对地面进行测量和制图
的方法。
为了确保数据的准确性和一致性,航空摄影测量
需要遵循一定的规范和标准。
以下是一些常用的航空摄影
测量规范:
1. 相机校准:在进行航空摄影之前,需要对相机进行校准。
校准包括内部参数和外部参数的确定,以及畸变的校正。
2. 航空摄影参数:航空摄影的参数包括飞行高度、航向、
侧向摆角、重叠度等。
这些参数需要根据具体的测量任务
来确定,以保证测量结果的精度和完整性。
3. 像控点的布设:在摄影测量中,需要设置一系列的像控
点以提供地面的控制信息。
像控点的布设需要考虑地形地貌、摄影任务的需求以及测量精度要求等因素。
4. 影像处理和配准:航空摄影后,需要对航空影像进行处理和配准,以获得准确的地理位置信息。
处理包括影像的几何校正、辐射校正、色彩平衡等。
5. 点和线的测量:通过航空影像,可以获取地面上的点和线的坐标信息。
测量需要采用专业的软件和方法,以保证测量精度和一致性。
6. 数字制图:最后,根据测量结果,可以进行数字制图。
数字制图的规范包括图幅的设置、符号和线型的规范、图件的比例和尺寸等。
这些是常用的航空摄影测量规范,不同的测量任务和地区可能会有一些特殊的规范要求,需要根据实际情况进行确定和遵守。
ADS40航空数码摄影相机的校准
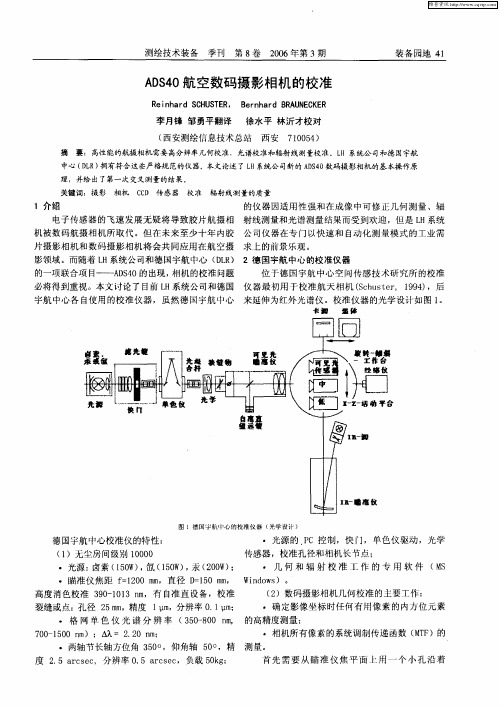
个工程模型的基线校准 ( 3 图 )转换前后的结果。 系统的光学特性 。从结果可看 出飞行方向一般 比垂 其次需要测量点扩散 函数 (S ) P F ,点扩散函数是 直方 向要好 。
-
,
。
£ 一 …
一
一
图 2 从 ( ,Y )到 ( ,Y ,Z )的转换 x ,z x
片摄影相机和数码摄影相机将会共同应用在航空摄 求 上的前 景乐 观 。
影领域 。而 随着 L H系统 公 司和德 国宇 航 中心 (L ) 2德 国宇 航 中心 的校 准仪 器 D R 的一项 联 合项 目—— A S0的 出现 , 机 的校 准 问题 D4 相 位 于德 国宇 航 中心 空 间传 感 技 术 研 究所 的校 准
・
两轴节长轴方位角 3 0 ,仰角轴 5  ̄ 5 ̄ 0 ,精
度 2 5a c e, 分辨 率 0 5a ce , 负载 5k ; . r sc . r sc 0g
测量。 首 先 需 要 从 瞄 准 仪 焦 平 面 上 用 一 个 小 孔 沿 着
维普资讯
转 换 。空 间 固 定 坐 标 系 (,, ) X Y z 向影 像 坐 标 系 向这两 个 主 要方 向 。通过 这 些测 量 可 以计 算 出沿 线
( , z ) X Y , 转换 时需应用简单的转换公式 ( lo 方 向的任意 点 的 MF O hf h T ,并用 于影像 处理 过程 的输 入 。
高度消色校准 3 0 1 1 m 9 - 03 n ,有 自准直 设备 ,校准 裂缝或点: 孔径 2 l 精度 l m 分辨率 0 1 m 5t, i l n , u . : u
.
格 网 单 色 仪 光 谱 分 辨 率 ( 5— 0 l 的高精度测量 ; 3 08 0 F , m 70 10 m :△ 0— 50 n ) = 22 i; .0 r m ・相 机所 有像 素 的 系统调 制 传递 函数 (T )的 MF
室内控制场数码相机检校应用于通用航空摄影测量的可行性研究
求解未 知数 , 为最 小二 乘平 差提供 初值 。 直接 线性变 换是 建立 像点 坐标仪 坐标 和相应 物
点物 方空 间坐标 之 间直接 的线性 关 系 的算 法 。假 设
式 () 1 中的畸变 改正 均为 0进 行变 形组 合为 ,
XLl YL2 Z 3+ L4+ 0+ 0+ 0+ 0+ + + L x L9 x L1 + x X + Y o ZL1 + z 一 0, l 0+ 0+ 0+ 0+ XL + YL6 - 7+ L8+ 5 q y + y L1 + y L l 4 Y 一 0 XL9 Y o Z 1- . () 9
m x
0
4 实验 结 果 分 析
本研 究 采 用数 码 相 机 佳 能 5 r I 实 验 D MakI为
一
一
x 一
,
相机 , 头焦 距 3 镜 5mm, 大有 效 像素 约 20 像 最 10万
・
5 ・ 2
测
绘
工
程
第 2 卷 1
, 一
m t 9 )/ .
X 1 yl ZJ l
0 0
1 Y Y1 y Z1 X1 1 l
Yl
X 2
0
0 z2 2 z2 z2 X Y2 Z2
l 0 0 0
L X Z
+
Yz
:
●
一 0 .
( 0 1)
X2 y2 Z2 1 y X2 Y Yz Y Zz z 2 2
非 量测数 码相 机 的检 校 流程 , 比分 析 室 内及 室外 对 三维控制 场 的检 校 精度 。根 据 实 际 检 校分 析 , 主要
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:049420911(2005)1120041202中图分类号:P204 文献标识码:B数字航空摄影测量的相机检校张建霞1,2,3,王留召2,3,4,刘先林3,李天子2,3,郭 辉2,3(1.西安科技大学,陕西西安710054;2.河南理工大学,河南焦作454001;3.中国测绘科学研究院,北京100039;4.昆明理工大学,云南昆明690053)C amera C alibration for Digital Air SurveyZH ANGJian 2xia ,W ANGLiu 2zhao ,LI U X ian 2lin ,LI T ian 2zi ,G UO Hui摘要:介绍数字航空摄影测量中数字相机检校的理论与方法,主要包括检校场的建立、检校的数学模型及解算和检校结果的验证等内容。
通过实例验证与分析得出结论,为数字航空摄影测量系统研究的后续工作提供基础性的保证。
关键词:数字影像;相机检校;检校参数;航空摄影测量 收稿日期:2005204205基金项目:河南省科技攻关资助项目(0524220043)作者简介:张建霞(19752),男,江苏淮安人,讲师,主要从事摄影测量教学和研究工作。
一、引 言目前国内航空摄影测量仍然大量使用进口的模拟航空摄影相机,不仅价格昂贵,要使用胶片,还要用昂贵的仪器进行胶片影像数字化,而且胶片动态范围小(6~7bit ),航摄质量低,测图周期长,影响整个行业进步。
另外,近几年国家每年有1亿多元的航空摄影任务,以国家、集体,甚至个人等形式的航摄队伍,都难以完成,只有发展新的数字航空摄影测量系统,才能适应这一需要。
航空摄影用数字相机是数字航空摄影测量的关键设备,而数字相机不是专门为摄影测量设计的,是非量测相机,其内方位元素无法直接测定,也存在较大的光学畸变差。
因此,数字相机的严格检校是数字航空摄影测量的基础性工作之一。
二、数字相机检校1.数字相机及其检校数字相机是由传统相机演变而来,仍使用传统的光学系统,只是图像信息的载体发生了变化,在原有胶片的位置换上了CC D 芯片。
景物光信号通过CC D 转换为电信号,再由模数转换形成数字影像。
数字相机检校的目的是恢复影像光束的正确形状,即通过检校获取影像的内方位元素和各项畸变系数。
2.数字相机检校内容及误差来源分析数字相机的检校内容包括主点位置(x 0,y 0)的测定;主距(f )的测定;光学畸变系数的测定。
数字相机的误差由光学误差、电学误差和机械误差组成。
光学误差主要是指光学畸变误差,即指相机物镜系统制作、装配引起的像点偏离其理想位置的点位误差,它分为径向畸变差和偏心畸变差两类;电学误差主要包括行同步误差、场同步误差和采样误差;机械误差是指从光学镜头摄取的影像转化到数字化阵列影像所产生的误差,主要由以下两个因素引起:①扫描阵列不平行于光学影像,致使数字化影像相对于光学影像有旋转;②每个阵列元素尺寸不同而产生不均匀变形。
3.数字相机检校的数学模型本检校是一种基于空间后方交会的检校方法。
它以共线方程为基础,以像点坐标作为观测值,解求相机内外方位元素、畸变系数以及其他附加参数的检校方法。
顾及改正项的共线方程式为(x -x 0)+Δx = -fa 1(X -X S )+b 1(Y -Y S )+c 1(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )(y -y 0)+Δy = -fa 2(X -X S )+b 2(Y -Y S )+c 2(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )(1)以像点坐标为观测值,可列出误差方程式V =AX E +BX I +CX AD -L (2)式中,X E 表示影像外方位元素;X I 表示影像内方位元素;X AD 表示一些附加参数,主要包括光学畸变改正项。
三、检校实例1.概 述本次数字相机检校的数学模型解算引进了墨尔142005年 第11期 测 绘 通 报 本大学的Australis 软件,像点定位和检校数学解算都由该软件完成。
采用的数字相机,其分辨率为4K ×4K,标称焦距为50mm ,影像以DCR 格式存储输出。
检校建立了室外检校场,在某家属楼立面布设了数百个间隔为1.5~2.5m 的控制点标志;该楼高约30m ,宽约为100m ,墙体有电梯、走廊和凹槽,构成了前后四个层次的立体结构。
控制点标志采用黑色的铝片做成,为了提高控制点坐标的获取效率,创造性地在铝片中间粘贴了全站仪棱镜反光片,其标志具体制作见图1。
图1 检校场控制点标志2.检校及结果在不同位置、不同高度和不同角度共拍摄了72张影像。
为以后作为航空相机使用,拍摄距离在40m 以外,与焦距相比,可视为无穷远,获取的影像能充满像幅(见图2)。
利用Australis 软件作数学解算时,将72张影像按拍摄的方位规律地分为3组,每组24张影像。
经检校,所得相机各项参数数值稳定,精度高,内方位元素的检校精度达到微米级,部分数据见表1。
图2 检校影像表1 主要参数检校结果影像组f /mmx 0/mmy 0/mmκ1κ2κ3152.090 0.185660.48642 2.5179E 25-9.3696E 29-2.2281E 212252.094 0.184630.48465 2.5525E 25-1.0014E 28-1.9466E 212352.091 0.187740.48615 2.5374E 25-9.6886E 29-2.0918E 212均值52.09170.186010.485742.5359E 25-9.6907E 29-2.0888E 212 3.检校可靠性验证为验证检校参数的可靠性,利用该相机作了近景立体摄影测量,设置了60个控制点。
利用上述数字相机的检校结果,经摄影测量数学解算,所得结果精度高,达到毫米级精度,表明该数字相机的检校结果正确可靠,部分示例数据见表2。
表2 近景立体摄影测量结果点号原始坐标/m近景摄影测量坐标/m坐标较差/m mXYZXYZΔXΔY ΔZ 103109.93971002.3060962.8713109.94061002.3070962.8695 -0.8 -1.1 -1.8212109.26801004.7630960.3923109.26911004.7640960.3894-1.1-0.5 2.9401104.97171006.8540960.8037104.97171006.8550960.80290-0.60.790697.0883996.5637960.380797.0867996.5634960.3779 1.60.3 2.8121291.04171002.2830962.874391.01321002.2840962.87211.5-1.22.2 利用公式m =±[ΔΔ]/n (3)计算中误差结果为m x =±1.3mm m y =±0.9mm m z =±3.8mm点位中误差为m o =±m 2x +m 2y +m 2z =±4.2mm 四、几点结论笔者目前正参与“轻型机数字航空摄影测量系统”项目的研究工作,数字相机的检校是整个研究工(下转第62页) 参考文献:[1] 江文萍,毋河海,杜清运,等.大型彩色地貌晕渲的自动生成技术研究[J].武汉大学学报(信息科学版),2004, 29(6):4962499.[2] 吴 樊,俞连笙.基于DE M的地貌晕渲图的制作[J].测绘信息与工程,2003,(2):31232.[3] 马海建,郭礼珍,赵 虎.基于DE M生成小比例尺分省彩色晕渲图[J].测绘信息与工程,2004,(8):40241. [4] 郭礼珍,李 霖,张园玉.基于视觉表象的彩色晕渲地图色彩设计[J].武汉大学学报(信息科学版),2004,29(6):4922495.[5] 李志林,朱 庆.数字高程模型[M].武汉:武汉测绘科技大学出版社,2003.[6] 俞连笙,王 涛.地图整饰[M].北京:测绘出版社,1995.[7] 曹纯贫.数字地貌晕渲中若干参数的设置[J].测绘通报,2003,(5):17219.[8] 徐 青.地形3维可视化技术[M].北京:测绘出版社,2000.[9] 王晓延,郭庆胜.基于DE M的地貌晕渲表达方法探讨[J].测绘通报,2003,(8):48250.[10] 江文萍,杜清运.数字地图3维可视化的若干研究与应用[E B/O L].http://w w ,2004210212.[11] 远图工作室.Atlas3D技术文档[E B/O L].http://w w w.,2004210214.(上接第42页)作的基础,决定着所有后续工作的价值和意义,通过检校工作及分析获得以下几点结论:1.相机机身要进行机械固定,否则会引起相机参数的不稳定;2.必须多方位地获取大量的影像才能得到高精度可靠的结果;3.条件允许时,尽可能建立3维检校场以消除检校参数间的病态相关性;4.检校场标志点的建立方法和检校软件Australis的首次使用为今后数字相机的检校提供了成功的范例;5.大面阵数字相机的成功检校为数字航空摄影测量系统研究奠定了前提和基础。
五、展 望胶片摄影被数字摄影所取代已成为必然趋势,数字航空摄影测量系统的研究已成为当前航空遥感领域的研究热点和发展方向,新型数字航空摄影机的应用必将为航空摄影测量技术带来一次变革,并把我国航空摄影测量技术推向数字航空摄影时代。
参考文献:[1] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.[2] 张祖勋,等.数字摄影测量学[M].武汉:武汉大学出版社,2002.。