混合励磁双凸极电机控制方式综述.pdf
混合励磁型双凸极结构直线电机[实用新型专利]
![混合励磁型双凸极结构直线电机[实用新型专利]](https://img.taocdn.com/s3/m/bf726a5a24c52cc58bd63186bceb19e8b8f6ec12.png)
(10)授权公告号 CN 201478982 U(45)授权公告日 2010.05.19C N 201478982 U*CN201478982U*(21)申请号 200920230678.3(22)申请日 2009.08.19H02K 41/02(2006.01)B60L 13/00(2006.01)(73)专利权人东南大学地址210096 江苏省南京市四牌楼2号(72)发明人花为 程明 赵文祥 曹瑞武(74)专利代理机构南京经纬专利商标代理有限公司 32200代理人叶连生(54)实用新型名称混合励磁型双凸极结构直线电机(57)摘要一种混合励磁型双凸极结构直线电机涉及电工、电机、轨道交通领域,特指一种适用于城市轨道交通的新型混合励磁直线电机,该电机包括均采用凸极结构的初级(1)、次级(2);初级(1)包括永磁体(3)、电枢绕组(4)、励磁绕组(5)、初级铁芯(6),次级(2)包括次级铁芯(7);永磁体(3)设置在初级(1)上的初级铁芯(6)中,电枢绕组(4)为集中绕组,绕于初级铁芯(6)的齿上,励磁绕组(5)绕于初级铁芯(6)的齿上;初级(1)安置于列车上;次级(2)为导磁性钢轨,安置于列车轨道上。
本实用新型具备磁场调节能力,可以降低轨道交通成本,提高电机效率,具有很高的理论和实用价值。
(51)Int.Cl.(19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书 1 页 说明书 3 页 附图 1 页权 利 要 求 书CN 201478982 U1/1页1.一种混合励磁型双凸极结构直线电机,其特征在于该电机包括均采用凸极结构的初级(1)、次级(2);初级(1)包括永磁体(3)、电枢绕组(4)、励磁绕组(5)、初级铁芯(6),次级(2)包括次级铁芯(7);永磁体(3)设置在初级(1)上的初级铁芯(6)中,电枢绕组(4)为集中绕组,绕于初级铁芯(6)的齿上,励磁绕组(5)绕于初级铁芯(6)的齿上;初级(1)安置于列车上;次级(2)为导磁性钢轨,安置于列车轨道上。
航空电励磁双凸极无刷直流起动发电机系统控制关键技术综述

电机易抄制应用2021,48(1)特约综述I EMCA航空电励磁双凸极无刷直流起动发电机系统控制关键技术综述#周兴伟!,谈阳!,周波#,王开淼#,张犁!,吴峰!,李占江$(!.河海大学能源与电气学院,江苏南京211100;2.南京航空航天大学自动化学院,江苏南京211100;3.南京越博动力系统股份有限公司,江苏南京210000)摘要:电励磁双凸极电机具有结构简单可靠、容错性能好、控制灵活等优势,可构成一种具有竞争力的新型航空无刷直流起动发电机系统。
简述了电励磁双凸极起动发电机系统的构成及其工作原理。
航空电一的要求,对电励磁双凸极起动发电机高可靠性控制、高高度控制、集成化控制等关键技术进行了结。
了电励磁双凸极起动发电机控制关键技术的发势。
关键词:电励磁双凸极起动发电机;控制技术;可靠性;效率;功率密度;集成中图分类号:TM352文献标志码:A文章编号:1673-6540(2021)01-0001-07doi:10.12177/emca.2020.195A Review of Key Techniques for Control of Aero Doubly SalientElectro-Magnetic Brrshless DC Starter Generator System**ZHOU Xingwei1,TAN Yang1,ZHOU Bo2,WANG Kaimiao2,ZHANG Li1,WU Feng1,LI Zhanjiang3(1.College of Energy and Electrical Engineering,Hohai University,Nanjing211100,China;2.College of Automation Engineering,Nanjing University of Aeronautica and Astronautica,Nanjing211100,China;3.Nanjing Yueboo Power System Co.,Ltd.,Nanjing210000,China)Abstract:Due to the merits of rugged structure,strong fault toleranca and high control flexibility,doubly salient electro-magnetic motor(DSEM)can compost a novel competitive aero brushless DC starter generator(SG)system.The composition and working principle of the double salienO electro-magnetic SG system are briery described.In response to the requirements of the special application fieie of aviation poweo supple,key technolooies such as high reliabilito controe,high ericiency and high poweo density controe,and inteerated control of the doubty salient electro-magnetic SG are summarized.The developing trends of the above key control technipucs foo doubty salient electro-magnetic SG are discussed.Key words:doubly salient electro-magnetic starter generator;control technique;reliability;efficiency;power denity;integration收稿日期:2020-11-18;收到修改稿日期:2020-12-21*基金项目:国家自然科学基金项目(51907051,51737006);中国博士后科学基金项目(2020M671317);中央高校基本科研业务费项目(B200202171)作者简介:周兴伟(1990-),男,博士,讲师,研究方向为电机控制’特约综述I EMCA电机与控剧定用2021,48(1)0引言机性能的日高,机电「不,电机技术成为飞机发展的方向,航空电源系统了更高⑴3*。
混合励磁同步电机及其控制技术综述和新进展_赵纪龙 (1)

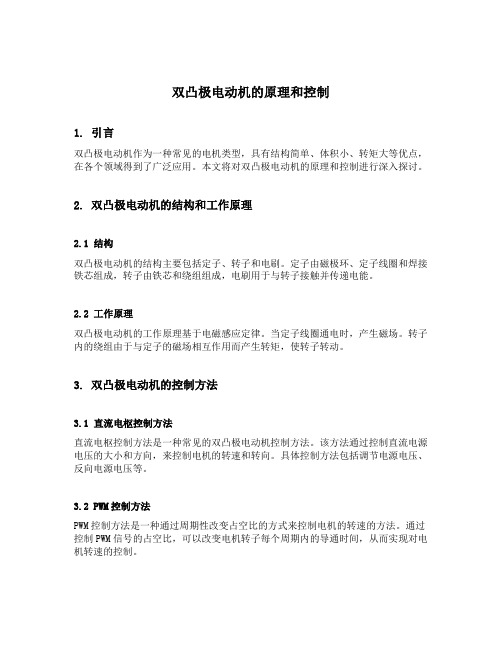
图1 串联磁势式混合励磁同步电机 Fig. 1 Topology of SHESM
流,这样就会产生一个很大的额外铜耗。同时,励 磁绕组注入过大电流,有可能会使永磁体永久退 磁。国内外学者对此类结构电机的研究较少。 1.2 并联磁势式混合励磁同步电机 并联磁势式混合励磁同步电机(parallel hybrid excitation synchronous machine,PHESM),是指永 磁磁势与电励磁磁势在磁路上呈并联关系的 HESM。 励磁绕组产生的磁通并不直接穿过永磁体, 所以不存在退磁问题。相互并联的磁路结构,便于 实现电 机的 增磁与 弱磁 运行, 其弱 磁能力 优于 SHESM。PHESM 的永磁体设置也比较灵活,既可 以放置在定子上, 也可以在转子上, 结构形式多样。 不同 PHESM 的拓扑结构具有不同的特点。目前, 针对混合励磁同步电机的研究主要集中在 PHESM 类型。 1989 年英国学者 E.Spooner 提出了一种受到广 泛 关 注 的 转 子 磁 极 分 割 型 (consequent pole permanent magnet,CPPM)并联磁势混合励磁同步 电机[16], 如图 2 所示。 该电机的永磁体位于转子上, 与铁心极交错排列,结构较为简单,励磁绕组放置 在定子上,在定子外层设有导磁背轭。 该电机的永磁磁通路径为: 永磁 N 极气隙 定子铁心定子背轭定子铁心气隙永磁 S 极 转子轭永磁 N 极;电励磁路径为:定子背轭 定子铁心气隙转子铁心极 1转子轭转子铁
第二章混合励磁双凸极电机工作原理

2 混合励磁双凸极 电机的结构 . 1
混合励磁双凸极电机是一种同时具有永磁双凸极电机和电励磁双凸极电机 特点的新型电 机。其中,永磁部分电 机和一般的永磁双凸极电机相同,其励磁
磁场由永磁体产生;电励磁部分电机起励磁调节的作用,它与一般的电励磁双 凸极电机相比,所需的励磁安匝数要少, 相应地, 励磁绕组的功率和损耗将减 少[ ,同时, [ 1 2 1 还具有较小的 励磁时间常数,可实现双向 快速励磁电 流控制。因
段距离,这样可以减少永磁体作为磁势与励磁绕组电流作为磁势产生的沿着轴 向的磁通间的交链,减少两部分电机的祸合,从而使两部分电机磁势建立的磁 通互不关联,经各 自的磁路闭合.电励磁极性和永磁极性可以相同,也可以相 反。通过控制励磁绕组电 流的大小和方向,可以 调节合成气隙磁场,从而实现 电压或转速的宽范围调节。混合励磁双凸极电机特性由永磁和电励磁电机的比 例分配决定,加大永磁部分电机的比例,电机工作特性将变硬,效率高;加大 电励磁部分电机的比例,电机调节范围变宽,故实际设计时,合理分配电机比
混合励磁双凸极电机性能研究
第二章 混合励磁双凸极电机工作原理
永磁双凸极电机是上世纪九十年代初出现的一种新型电机,具有结构简单、
绕组端部短、 用铜省、电 小、 阻 结构稳固 功率 、 密度和效率高等 [ 合励 优点2 1 1混
磁双凸极电机是在永磁双凸极电机的基础上演变出来的。本章首先介绍混合励 磁双凸极电机的基本结构和工作原理,然后根据工作原理推导出电机的数学模 型, 最后分别对电励磁双凸极电 机和永磁双凸极电 机建立A S S N Y 的三维电 磁场
例,可使系统的整体性双凸极电机的优点,又增加了励磁可调的 特点,结构简单,控制灵活,可高速运行。 混合励磁双凸极电机的结构简图如图21 .所示, 它由两部分组成, 左边为普 通永磁双凸极电机 ( SM DP ) ,右边为定子上装有励磁绕组的电励磁双凸极电机 (S M) D E 。永磁部分电机与电励磁部分电机间用气隙或非磁性金属材料隔开一
双凸极电动机的原理和控制
双凸极电动机的原理和控制双凸极电动机是一种新型的电动机,它的原理和控制方式与传统的电动机有所不同。
双凸极电动机的原理是基于电磁感应的原理,它的控制方式则是通过调节电流和电压来实现的。
双凸极电动机的原理双凸极电动机的原理是基于电磁感应的原理。
当电流通过电动机的线圈时,会产生一个磁场。
这个磁场会与电动机中的磁铁相互作用,从而产生一个力矩,使电动机开始转动。
双凸极电动机的特点是它的磁铁是由两个凸起的部分组成的,这两个凸起的部分分别位于电动机的两端。
当电流通过电动机的线圈时,会产生一个磁场,这个磁场会与磁铁的两个凸起部分相互作用,从而产生一个力矩,使电动机开始转动。
双凸极电动机的控制双凸极电动机的控制方式是通过调节电流和电压来实现的。
当电流和电压的大小发生变化时,电动机的转速也会发生变化。
双凸极电动机的控制方式有两种:一种是直接控制电流,另一种是控制电压。
直接控制电流是通过改变电流的大小来控制电动机的转速。
控制电压是通过改变电压的大小来控制电动机的转速。
双凸极电动机的控制方式还可以通过改变电动机的极数来实现。
当电动机的极数增加时,电动机的转速也会增加。
当电动机的极数减少时,电动机的转速也会减少。
双凸极电动机的应用双凸极电动机的应用非常广泛,它可以用于各种不同的领域。
例如,它可以用于汽车、飞机、船舶等交通工具的动力系统中。
它还可以用于工业机械、家用电器等领域。
总之,双凸极电动机是一种新型的电动机,它的原理和控制方式与传统的电动机有所不同。
它具有转速高、效率高、噪音低等优点,因此在各种不同的领域都有广泛的应用前景。
混合励磁双凸极电机驱动控制技术研究的开题报告
混合励磁双凸极电机驱动控制技术研究的开题报告1. 研究目的混合励磁双凸极电机是一种新型的电机结构,在机械、制造业以及能源等领域都有广泛的应用。
本研究旨在探究混合励磁双凸极电机的驱动控制技术,实现高效、稳定的控制方法,提升电机的性能和应用范围。
2. 研究内容(1)混合励磁双凸极电机基本原理及型号选择(2)混合励磁双凸极电机的动态特性分析(3)混合励磁双凸极电机的控制技术研究(4)混合励磁双凸极电机的应用研究3. 研究方法本研究采用理论分析和实验研究相结合的方法。
首先,对混合励磁双凸极电机的基本原理进行理论分析,选择合适的电机型号进行实验研究。
在实验过程中,采用传统的PID控制方法和基于模型的控制方法进行比较,并探究控制参数对电机性能的影响。
4. 研究意义混合励磁双凸极电机具有高效、稳定、可靠的特点,在现代工业中的应用越来越广泛。
本研究将探索一种高效、稳定的控制技术,为电机的应用和发展提供理论基础和实际应用价值,具有重要的意义和价值。
5. 研究进度安排本研究计划分为以下几个阶段完成:(1)文献综述和混合励磁双凸极电机的基础理论研究:3个月(2)混合励磁双凸极电机的型号选择和实验研究:6个月(3)基于传统的PID控制方法的实验研究:3个月(4)基于模型的控制方法的实验研究:3个月(5)综合分析与总结:2个月6. 参考文献(1)Zhu, M., Zhao, Z., & Zhu, Y. (2017). A novel hybrid excitation double-sided permanent magnet motor for electric vehicles. IEEE Transactions on Energy Conversion, 32(2), 906-915.(2)Chen, K., Zou, J., & Song, Y. (2016). Speed control of hybrid excited flux switching motor based on artificial neural network with improved disturbance rejection. IEEE Transactions on Magnetics, 52(7), 1-9.(3)Ji, B., Zhang, J., & Sun, Y. (2018). Direct torque and flux control of hybrid excitation synchronous motor based on model predictive control. IEEE Transactions on Industrial Electronics, 66(10), 7992-8002.(4)Qiu, J., & Wu, M. (2018). Adaptive terminal sliding-mode control of hybrid-excitation flux-switching motor drive. IEEE Transactions on Industrial Electronics, 65(5), 4255-4264.(5)Hao, J., Chen, X., & Chen, Z. (2019). Deep learning-based speed control of hybrid excitation synchronous motor with coupled dynamic estimation. IEEE Transactions on Industrial Informatics, 15(9), 4954-4964.。
双凸极电动机的原理和控制

双凸极电动机的原理和控制双凸极电动机是一种常见的直流电动机,它采用了双凸极结构,具有一定的优势和特点。
本文将介绍双凸极电动机的工作原理和控制方法。
一、双凸极电动机的工作原理双凸极电动机由电枢和磁极组成。
电枢是由绕组和电刷组成的,而磁极则是由永磁体或电磁线圈构成的。
当电流通过电枢绕组时,产生的磁场与磁极的磁场相互作用,产生电磁力,使电动机产生转矩。
根据左手定则,当电流流过电枢绕组时,磁场方向与电流方向垂直,产生力的方向垂直于磁场和电流的方向,从而产生转矩。
双凸极电动机的转子上有两个凸起的部分,这两个凸起被称为凸极,它们与电枢的绕组相互作用,产生转矩。
由于凸极的存在,双凸极电动机在工作时具有较高的转矩和较低的起动电流,使得它在一些需要较大起动转矩的场合中具有广泛的应用。
二、双凸极电动机的控制双凸极电动机的控制可以通过改变电源电压、电枢绕组的连接方式和电刷的位置来实现。
1. 改变电源电压:改变电源电压可以改变电动机的转速。
当电源电压增大时,电动机的转速也会增加;当电源电压减小时,电动机的转速也会减小。
通过调节电源电压,可以实现对电动机的转速控制。
2. 改变电枢绕组的连接方式:通过改变电枢绕组的连接方式,可以改变电动机的转向。
当电枢绕组的两端交换连接时,电动机的转向也会改变。
这种方法常用于需要频繁改变转向的场合。
3. 改变电刷的位置:电刷是与电枢绕组相连的导电材料,通过改变电刷的位置,可以改变电枢绕组中的电流方向,从而改变电动机的转向。
这种方法适用于需要定向控制的场合。
双凸极电动机的控制方法多种多样,可以根据实际需求选择合适的控制方式。
在实际应用中,可以通过组合使用不同的控制方法来实现更精确的控制效果。
总结:双凸极电动机是一种常见的直流电动机,它具有较高的转矩和较低的起动电流,适用于一些需要较大起动转矩的场合。
双凸极电动机的控制可以通过改变电源电压、电枢绕组的连接方式和电刷的位置来实现。
通过调节电源电压、改变电枢绕组的连接方式和改变电刷的位置,可以实现对电动机的转速和转向的控制。
双凸极电动机的原理和控制
双凸极电动机的原理和控制1. 引言双凸极电动机作为一种常见的电机类型,具有结构简单、体积小、转矩大等优点,在各个领域得到了广泛应用。
本文将对双凸极电动机的原理和控制进行深入探讨。
2. 双凸极电动机的结构和工作原理2.1 结构双凸极电动机的结构主要包括定子、转子和电刷。
定子由磁极环、定子线圈和焊接铁芯组成,转子由铁芯和绕组组成,电刷用于与转子接触并传递电能。
2.2 工作原理双凸极电动机的工作原理基于电磁感应定律。
当定子线圈通电时,产生磁场。
转子内的绕组由于与定子的磁场相互作用而产生转矩,使转子转动。
3. 双凸极电动机的控制方法3.1 直流电枢控制方法直流电枢控制方法是一种常见的双凸极电动机控制方法。
该方法通过控制直流电源电压的大小和方向,来控制电机的转速和转向。
具体控制方法包括调节电源电压、反向电源电压等。
3.2 PWM控制方法PWM控制方法是一种通过周期性改变占空比的方式来控制电机的转速的方法。
通过控制PWM信号的占空比,可以改变电机转子每个周期内的导通时间,从而实现对电机转速的控制。
3.3 反馈控制方法反馈控制方法是一种通过测量电机转子位置和速度,并将测量结果与期望值进行比较,从而调整电机控制信号的方法。
常见的反馈控制方法包括位置反馈控制和速度反馈控制,可以实现更精准的电机控制。
3.4 其他控制方法除了上述常见的控制方法外,还有一些其他的电机控制方法,如模糊控制、神经网络控制等。
这些方法可以根据具体应用场景和需求进行选择和应用。
4. 双凸极电动机的应用领域双凸极电动机由于其结构简单、体积小、转矩大等特点,在各个领域都有广泛的应用。
以下是双凸极电动机的一些常见应用领域:1.家用电器:如洗衣机、吸尘器等。
2.机械设备:如打印机、数控机床等。
3.汽车行业:如电动汽车、电动自行车等。
4.机器人技术:如工业机器人、家庭机器人等。
5.医疗设备:如电动轮椅、手术机器人等。
6.空调设备:如空气净化器、风扇等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
混合励磁双凸极电机控制方式综述刘奕杉电气15级研究生,331501000020摘要:本文介绍了混合励磁双凸极电机的发展历史跟研究现状,分析了混合励磁双凸极电机的各种控制方式,介绍了在分区控制的思想下,励磁系统的弱磁控制、增磁控制。
以及半桥功率变换器供电方式下的标准角控,针对标准角控制时高速段下电机输出转矩不足的问题又介绍了提前角控制。
最后总结展望了混合励磁双凸极电机控制方式研究中存在的问题以及解决方法。
关键词:混合励磁;双凸极电机;控制方式0 引言上个世纪90 年代美国电机专家T . A. L i p o 提出了永磁双凸极电机[1],双凸极永磁(Doubly Sallent Permanent Magnet,DSPM)电机是近年来在开关磁阻电机基础上发展出来的一种新型高效节能电机。
混合励磁双凸极电机( Hybrid Excited Doubly SalientMachine,HEDS)[2]是在永磁双凸极电机的基础上演变而来的,它将永磁体励磁与电励磁[3]进行了有机结合,继承了永磁双凸极电机的全部优点,而且具有电机磁场可灵活调节的特点,因此成为双凸极电机的研究热点。
目前对混合励磁电机的研究,主要围绕着对电机不同混合励磁结构、混合励磁原理分析等方面,而对混合励磁电机的控制策略研究则相对较少,HEDS电机继承了DSPM 电机凸极永磁的优点,具有功率密度高、结构简单、容错性能好、控制灵活等优点。
它在工业驱动、航空航天、汽车、舰船以及诸如电动汽车等需宽调速驱动应用场合具有前景[4]。
HEDS电机的控制策略包含 2 种基本控制模式[5]即低速时的电流斩波控制和高速时的角度位置控制。
根据该电机的运行原理提出采取分区控制策略,对电机进行弱磁控制,增磁控制。
以及HEDS在半桥功率变换器供电方式下,标准角控制策略对电机输出转矩的影响,并在此基础上,介绍了提前角控制。
1 双凸极电机的发展历史及研究现状开关磁阻电机(简称SRM)是上个世纪60 年代国外推出的一种交流调速电动机的新品种,随着电力电子技术的发展,出现了开关磁阻电机调速驱动系统。
开关磁阻电机结构非常简单,定、转子都为凸极齿槽结构,定子上装有集中绕组,转子上没有绕组和磁钢,这使得定、转子的结构坚固,制造成本低,装配工艺简单,冷却方便。
永磁双凸极电机的设计思想最早可以追溯到1955 年Rauch和Johnson对永磁双凸极电机的研究[6],但是由于当时永磁材料性能等问题的限制,这种原型机体积较大、力能指标相对较低,并没有得到多大的重视。
直到上个世纪90 年代初,美国Wisconsin大学Lipo教授领导的科研小组,进行了大量永磁双凸极电机的研究工作,取得了丰硕的研究成果。
其中,Liao于1993 年发表了关于DSPM主要尺寸确定的论文[7],表明DSPM电机具有较高的功率密度,随后Liao又于1995 年在IEEE上系统阐述了DSPM电机工作原理及其控制特点[8],文献成为DSPM电机的经典作品。
图1.1为美国Wisconsin 大学Lipo教授领导的科研小组于1992 年提出的DSPM电机结构示意图,电机定转子结构外形与开关磁阻电机相似,呈双凸极结构,但它在定子(或转子)上放有永磁体,从而使运行原理和控制策略与开关磁阻电机有本质区别。
概括地讲,DSPM电机系统的主要优点是结构简单、控制灵活、动态响应快、调速性能好、转矩/电流比大,可实现各种特殊要求的转矩/转速特性,功率因数接近于1,效率高。
Lipo.T.A等人提出的混合励磁双凸极电机不同之处在于永磁体旁边附加了一条并联磁分路,为直流励磁磁通提供了一个通路,避免了直流励磁磁势直接作用于永磁体,减小了永磁体产生不可逆退磁的风险,并且通过磁分路磁阻的适当设计,能达到用较小的直流励磁磁势获得较大气隙磁通调节范围的目的[9]。
东南大学程明教授所领导的课题组提出了磁桥式混合励磁双凸极电机[10],电机结构如图1.2所示,其特点是在电机永磁体与直流励磁绕组之间设置了一定尺寸的导磁桥,使电机定子铁芯保持一个整体,南京航空航天大学的严仰光教授等在双凸极电机方面作了很多研究工作,他在文献[11]中提出了一种新型的12/8 极磁路独立式的混合励磁双凸极电机结构,这种并列结构混合励磁双凸极电机定子有两并列的电枢铁芯,一段为永磁励磁,另一段为电励磁,电枢绕组则共用,永磁部分电机和与电励磁部分电机间用气隙或非磁性金属材料隔开一段距离,这样可以减少永磁体作为磁势源和励磁绕组电流作为磁势源产生的沿轴向的磁通间的交链,减少两部分电机的耦合,从而使两部分电机磁势建立的磁通互不关联,经各自的磁路闭合[11]。
图1.1DSPM 电机结构示意图图1.2 三相12/8极HEDS电机结构截面图2 HEDS电机标准角控制以及提前角控制2. 1 系统构成图1.3为本文所研究的定、转子极弧为15° /20°的12 /8极HEDS电机结构截面图。
A相定子齿中心线与转子槽中线对齐的位置为初始位置。
HEDS 电机作为机电一体化的装置,其驱动系统由位置传感器、控制器及功率变换器构成。
图1.3三相12/8极HEDS电机结构截面图本文电动系统中,功率变换器的主电路采用三相半桥电路,如图1.4所示。
图1.4 三相半桥功率变换器电路2.2 标准角控制分析在电流换相过程中,由于存在电枢电感,电流的上升和下降都需要一定的时间,图1.5(a)为考虑上升、下降时间的电枢电流波形示意图,图1.4(b)为相应的三相励磁转矩及合成励磁转矩波形示意图。
由于三相绕组结构对称,HEDS电机输出转矩在5°、20°和35°附近产生换相脉动的机理相同。
同样,在10°、25°和40°附近产生换相脉动的机理也相同。
故仅以5°和10°处的换相过程为例进行分析。
在5°时,功率管Q1开通,a 相电流从零开始上升。
功率管Q3关断,c相电流由正开始下降到零。
功率管Q5 维持原导通状态,b 相电流为负。
因在这个过程中正向电流的流通绕组发生改变,而负向电流的流通绕组无变化,所以称之为正向电流换相过程。
c相电流下降所在的区域为c相绕组匝链的励磁磁链无变化的非有效转矩区,不产生转矩。
而a相电流上升所在的区域为a 相的有效转矩区,随着a相电流的上升a相输出转矩从零逐渐增大,进入稳态后,a相才输出稳定转矩,因此在这个换相过程中电机输出转矩是从两相转矩突变为单相转矩后再逐渐增大到两相转矩。
在10°时,功率管Q1维持原导通状态不变,a相电流为正。
功率管Q5关断,b相电流由负开始下降到零。
功率管Q6开通,c相电流从零开始上升到负。
因此在这个过程中负向电流的流通绕组发生改变,而正向电流的流通绕组无变化,所以称之为负向电流换相过程。
b相电流下降所在的区域为b相的非有效转矩区,不产生转矩。
而c相电流上升所在的区域为c相的有效转矩区,随着c相电流的上升c相输出转矩从零逐渐增大,进入稳态后,c相才输出稳定转矩,所以这个换相过程中电机输出转矩也是从两相转矩突变为单相转矩后再逐渐增大到两相转矩。
由此可见,电机正、负向电流换相过程中转矩变化机理相同。
因此,以下分析仅以5°处为例。
图1.5 电流波形及励磁转矩波形示意图(a)考虑上升,下降时间的电流波形示意图(b)三相励磁转矩及合成励磁转矩波形示意图标准角控制下,a相绕组在转子位置角θ=5°时通电,此时a相绕组两端电压为电源电压的一半。
忽略电阻项、电枢绕组间互感项及电感变化引起的感应电势项[11]。
由a 相电流的上升率我们可知随电机转速升高,绕组电流上升率减小,在有效转矩区间内电流平均值减小,进而导致电机输出转矩减小,所以在标准角控制下,当转速较高时,HEDS 电机输出转矩减小幅度较大,且转速越高转矩减小越显著。
图1.6为不同转速下a相绕组内正向电流波形示意图,其中ω 1 <ω2 <ω 3 。
图1.6 不同转速下电流波形示意图2.3 提前角控制由前文分析知,在标准角控制下,HEDS电机除了存在因非线性引起的稳态转矩脉动外,还由于电流换相的原因,存在较大的换相转矩脉动,且随电机转速升高,绕组内电流上升率逐渐减小,有效转矩区间内电流平均值减小,电机对外输出转矩的能力降低。
特别是在高速、大负载的情况下,由于受电流换相的影响,电机出力减小明显。
为改善电机的转矩特性(提高输出转矩值、减小转矩脉动率),提出了提前角控制。
HEDS电机提前角控制策略:仍以a相为例,提前角控制下正、负向电流同时提前θ T度导通,即(5°-θ T,20°)区间开关管Q 1导通,(25°-θ T,40°)区间开关管Q 4导通,导通规律如图1.7所示。
图1.7 提前角控制下a相绕组导通规律采用提前角控制后,绕组电流在有效转矩区间内的平均值增大,且转速越高,电流平均值增大转速越大。
因此,采用提前角控制能提高HEDS电机的输出转矩,且特别是提高电机高速下的输出转矩效果更显著。
另一方面,当提前角达到一定值后,相绕组电流在有效转矩区间内的平均值基本恒定,电机输出转矩也不再增加,此时继续增大提前角,只会增加电机损耗,所以提前角不宜过大。
3 HEDS电机的分区控制3.1 HEDS电机的磁通控制原理图1.8为一台三相12 /8极HEDS电机,其定、转子呈双凸极结构,转子上无绕组、无永磁体,定子采用集中式绕组,空间相对定子齿上的线圈两两相连,两组线圈串联或并联形成一相电枢绕组。
定子轭部嵌入4块切向充磁的永磁体,与永磁体相邻的定子槽内放置电励磁绕组,通过调节电励磁电流的大小和方向,能实现对电机主磁场的灵活调节与控制[21]。
电励磁绕组放置于定子,结构紧凑,易于冷却和散热,同时保持了转子结构简单的优点。
由于增加了电励磁绕组,与DSPM电机相比,HEDS 电机存在两种励磁源,即永磁励磁源和电励磁源。
两种励磁源产生的磁场在气隙中相互叠加,共同作用形成电机主磁场。
当电励磁磁场与永磁磁场的方向相同时,电励磁起增磁作用,二者共同作用形成的电机主磁场则增强。
相反,电励磁起弱磁作用则电机主磁场削弱[12] 。
因此,可以通过调节通入电励磁绕组中励磁电流的大小和方向实现增磁或弱磁作用。
可见,HEDS电机与DSPM电机相比,具有磁通可控的优点。
由于HEDS电机的定、转子的双凸极结构和磁路饱和等的影响,导致HEDS电机的一些参数如磁链、电感等均不是常数,而是随着绕组电流和转子位置角的变化而变化,因此增加了HEDS电机建模的难度[13]。
为了简化分析,假设:1)忽略HEDS电机的铁耗;2)忽略电枢绕组之间的互感;3)稳态时,励磁电流恒定;4)HEDS电机各相参数对称;5)不考虑电枢电流的变化对电励磁绕组电压的影响且认为励磁绕组的自感不变。