基于RSSI测距技术的三角形面积和定位算法
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法室内定位是指在室内环境中使用技术手段对移动终端的位置进行定位。
目前,基于RSSI(接收信号强度指示)的室内定位算法被广泛应用于WiFi、蓝牙和Zigbee等无线通信技术中。
由于室内环境的复杂性,定位误差较大,因此需要对模型参数进行优化改进。
我们需要了解室内定位算法的基本原理。
基于RSSI的室内定位算法通常使用多个参考节点的信号强度值来进行定位。
参考节点被布置在室内环境中,并且已知其位置坐标。
通过测量移动终端接收到的参考节点的信号强度,可以计算移动终端与每个参考节点之间的距离。
然后,通过距离的三角定位法来确定移动终端的位置坐标。
由于信号在室内环境中的传播受到多径效应、障碍物的干扰等因素影响,计算得到的距离存在误差。
为了改进模型参数,可以考虑以下几个方面。
第一,优化距离计算模型。
距离的计算模型一般使用路径损耗模型或指数模型。
路径损耗模型将信号强度与距离之间的关系表示为一个线性函数,但在室内环境中,信号强度与距离之间的关系并非完全线性。
可以尝试使用非线性函数来建立信号强度与距离之间的关系模型,以更准确地计算距离。
第二,引入地理信息辅助定位。
除了信号强度,地理信息也是确定位置的重要因素。
可以将参考节点的地理位置信息作为约束条件,与信号强度结合使用。
可以使用最小二乘法来拟合地理位置信息和信号强度,以获得更精确的定位结果。
考虑场景特性进行参数优化。
不同的室内环境具有不同的特征,例如墙壁材料的不同、障碍物的位置等。
可以通过对不同场景中的RSSI数据进行采集和分析,建立不同场景下的模型参数,以提高室内定位的准确性。
第四,引入机器学习算法进行参数优化。
机器学习算法可以通过学习大量的RSSI数据和真实位置数据,自动调整模型参数,以最小化定位误差。
可以使用分类算法(如支持向量机)或回归算法(如神经网络)来进行建模和参数优化。
基于RSSI优化的模型参数改进室内定位算法可以通过优化距离计算模型、引入地理信息辅助定位、考虑场景特性进行参数优化以及引入机器学习算法等方法来提高室内定位的准确性。
基于RSSI测距的定位算法的研究
基于RSSI测距的定位算法的研究引言ZigBee技术中定义了3种设备:协调器(Coordinator),路由器(Router)和终端设备(End?Device)。
协调器主要负责启动整个网络;路由器的功能主要是允许其他设备加入网络及多跳路由等;终端设备一般没有特定的维持网络结构的责任。
ZigBee技术通过这3种设备可以构成一个移动自组织的网络,广泛应用在家庭、环境监测、工农业等场合[1]。
目前的定位技术总体上可以分为基于测距技术与无需测距技术。
前者定位精度较高,后者实现起来比较简单。
在测距技术中,有基于接收信号强度(RSSI)、基于到达时间差(TOA)、基于不同波的到达时间差(TDOA)以及到达角度差(AOA)等[24]。
在这几种测距技术中,基于RSSI的测距技术将接收到的信号强度转换为节点之间的距离,不需要额外的硬件和数据交换,有成本低、容易实现等优点。
本文结合CC2430/CC2431芯片,设计了一种基于RSSI 的测距定位算法。
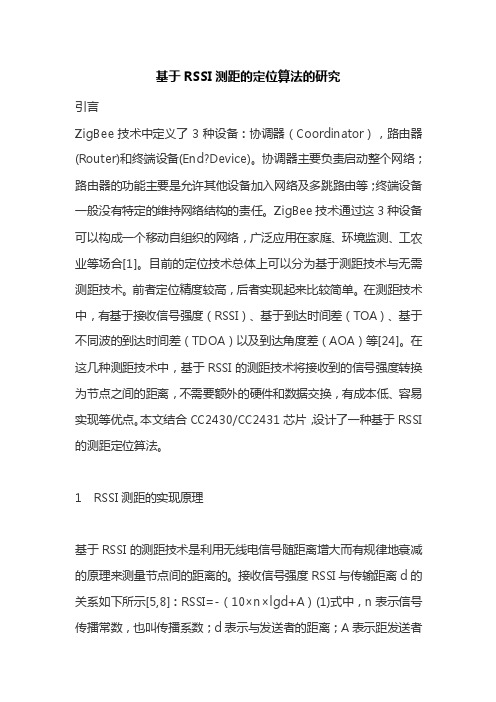
1 RSSI测距的实现原理基于RSSI的测距技术是利用无线电信号随距离增大而有规律地衰减的原理来测量节点间的距离的。
接收信号强度RSSI与传输距离d的关系如下所示[5,8]:RSSI=-(10×n×lgd+A)(1)式中,n表示信号传播常数,也叫传播系数;d表示与发送者的距离;A表示距发送者1 m时的信号强度。
测距精度的高低受到n与A实际取值大小的影响较大。
A是一个经验参数,可以通过测量距离发送者1 m处的RSSI 值得到。
n是用来描述信号强度随距离增加而递减的参量,n的大小依赖具体的环境。
为了得到最优的n值,可以先放置好所有的参考节点,然后尝试用不同的n_index值找到最适合这个具体环境的n值。
2 节点组成的定位网络2.1 CC2430/CC2431芯片介绍CC2430/CC2431是Chipcon公司(现被TI收购)推出的针对IEEE 802.15.4/ZigBee应用的片上系统,其内部集成了工作在2?4 GHz 的射频收发器,拥有低功耗的8051 MCU内核、128 KB可编程Flash ROM和8 KB RAM,还有A/D转换器、定时器等。
《基于RSSI的RFID室内定位算法优化研究》
《基于RSSI的RFID室内定位算法优化研究》篇一一、引言随着无线通信技术的飞速发展,室内定位技术在许多领域得到了广泛应用,如物流、医疗、安防等。
射频识别(RFID)技术因其非接触式、高效率等优点,在室内定位系统中得到了广泛的应用。
基于接收信号强度指示(RSSI)的RFID室内定位算法是其中一种重要的技术手段。
然而,由于室内环境的复杂性和多径效应的影响,传统的RSSI定位算法在定位精度和稳定性方面仍有待提高。
本文针对这一问题,对基于RSSI的RFID室内定位算法进行优化研究。
二、RSSI基本原理及现有问题RSSI是指无线信号的接收强度指示,可以通过RFID阅读器接收到的信号强度来估算阅读器和标签之间的距离。
基于这一原理,传统的RSSI定位算法通过多标签定位和三角测量法等方法实现室内定位。
然而,由于室内环境的复杂性和多径效应的影响,RSSI值容易受到环境因素的影响,导致定位精度不高和稳定性差。
三、算法优化方法针对上述问题,本文提出以下几种算法优化方法:1. 数据预处理:通过对收集到的RSSI数据进行预处理,如去除噪声、数据平滑等操作,提高数据的可靠性。
2. 多模型融合:结合多种定位算法的优点,如指纹定位、三角测量法等,通过多模型融合提高定位精度。
3. 环境校正:根据实际环境特点,对RSSI值进行校正,以减少环境因素对定位精度的影响。
4. 动态调整阈值:根据实际环境中的信号强度变化情况,动态调整阈值,以提高定位的稳定性和准确性。
四、具体实现及实验分析(一)数据预处理首先,收集室内环境的RSSI数据,并对数据进行去噪、平滑等预处理操作。
预处理后的数据更加可靠,为后续的定位算法提供基础。
(二)多模型融合本文采用指纹定位和三角测量法相结合的方式进行定位。
首先,通过指纹定位建立室内环境的指纹图谱;然后,利用三角测量法根据接收到的RSSI值估算标签的位置。
通过多模型融合,提高了定位的精度和稳定性。
(三)环境校正及动态调整阈值针对不同环境特点,本文提出了一种基于环境校正的RSSI 值修正方法。
基于RSSI的测距差分修正定位算法_任维政

基于 RSSI 的测距差分修正定位算法*
任维政 , 徐连明 , 邓中亮* , 王 川
(北京邮电大学电子工 程学院 , 北京 100876)
摘 要 :为了抑制 RSSI 误差对无线传感器节点自身定位精度的影响 , 以三边定位算法为基础 , 定义了个 体差异差 分系数 、距
离差分系数和距离差分定位方程 , 把离目标节点最近的 信标节点 作为参 考节点 对基于 RSSI 的 测距进 行差分 修正 , 并将差 分
分定位方程
di =d′i -ρie i0 i =1 , 2 , … , n
(8)
第7期
任维政 , 徐连明等 :基于 RSSI 的测距差分修正定位算法
1 249
其中 , di 为目标节点到第 i 个信标节点的修正距离 ,
参考节点测量距离误差 e0i =d′0i -d0i , n 为参与定
位的信标节点个数 。
-d
2 i
x2i
-x2k
+y
2 j
-y2k
+d2k
-d
2 j
(2)
1 .2 无线电传播路径损耗模型分析
由于传感器节点自身具备通信能力 , 通信控制
芯片通常会提 供测量 RSSI 的方法 , 在信标 节点广
播自身坐标的 同时可完成 RSSI 的测量 , 故 而是一
种低功率 、低代价的测距技术 。 其误差主要来源于
PL(d)=P L(d0)+10klg
d d0
+X σ
(4)
其中 , P L(d)为经过距离 d 后的路径损耗 , dB ;Xσ为
平均值为 0 的高斯分布随机变数 , 其标准差范围为 4
~ 10 。式中 k 的范围在 2 至 5 之间 。取 d =1 m , 代入 式(3), 可得到 Lo ss , 即P L(d0)的值 。这样根据上式
简析无线传感器网络的无线定位算法
简析无线传感器网络的无线定位算法无线传感器网络的发展和无线通信技术、片上系统与微机电系统密不可分,是一种高科技含量的新型技术。
从本质上来看,无线传感器网络是一种分布式的传感网络,它和外部的传感器相连,进而实现传感器的资源共享。
另外,无线传感器网络的设置也较为灵活,可以分为有线和无线两种方式。
无线传感器网络可以实现数据的收集、处理和传输,集合了现代化信息技术的核心,在多个领域都有广泛的应用。
无线定位是无线传感器网络的核心技术,它是主要的数据提供者,对整个无线传感器网络的发展有着重要作用。
无线定位突破了传统定位技术的限制,将定位的精确性也大幅度提升,因而无线传感器网络的发展在某种程度上取决于无线定位技术的成熟性。
以目前的定位技術而言,它的算法有很多,以不同的参考量为依据,然后用数学的方式求出最终定位结果。
不同的算法选择有不同的效果,需要的技术支持也不相同。
1 无线定位算法无线定位算法的基本原理是:通过电波等无线通信手段,就可以对节点进行定位,之后利用网络的计算技术进行位置的修正。
其实,无线定位算法的方法有很多,但是以数学为基础的,有的以几何为基础的,有的以数据分析为基础,通过距离的计算,实现目标的定位。
具体而言,无线定位的算法有两种:一种是根据测量的角度和距离定位;另一种是与测量无关的定位。
基于测距的定位机制是根据目标的位置建立相应的坐标系,然后计算其相邻节点的距离和角度。
有了这些基本的信息,就可以根据三点确定一个平面,在平面中寻找相应的几何关系,最终得出想要的坐标。
在基于距离的定位过程中,方法有很多,有的是以信号的时间为定位基准,有的是以地区为计算的基础。
不同的算法有不同的利弊,需要根据自身的需求做出合理的选择。
基于测量距离和角度的算法缺点在于:它对单个传感器节点的设计有更高的要求,这就增加了传感器节点的能耗与造价,而且这种算法的计算量较大,消耗的成本也更大,时间也较长,这就造成了定位系统的反应不够迅速,无法最快地提供定位服务。
基于RSSI的无线传感器网络三角形质心定位算法
引言无线传感器网络是面向事件的监测网络,对于大多数应用,不知道传感器位置而感知的数据是没有意义的。
实时地确定事件发生的位置或获取消息的节点位置是传感器网络最基本的功能之一,也是提供监测事件位置信息的前提,所以定位技术对传感器网络应用的有效性起着关键的作用。
在无线传感器网络中,按节点位置估测机制,根据定位过程中是否测量节点间的实际距离或角度,可分为基于距离(Range—based)的定位算法和距离无关(Range—free)的定位算法。
前者需要测量节点间的实际距离;后者是利用节点间的估计距离来计算末知节点的位置。
在基于距离的定位算法中,测量节点间距离或方位时采用的方法有TOA(Time of Arrival),TDOA(Time Difference of Arrival),RSSI(ReceivedSignal Strength Indication)和AOA(Angle of Arri—val)。
距离无关的算法主要有质心算法、DV—hop算法等。
相比之下,基于距离的定位算法测量精度较高,距离无关的定位算法对硬件要求较低。
比较各种基于距离的测距算法,TOA需要精确的时钟同步,TDOA需要节点配备超声波收发装置,AOA需要有天线阵列或麦克风阵列,这三种算法对硬件要求较高。
RSSI技术主要是用RF信号,而节点本身就具有无线通信能力,故其是一种低功耗、廉价的测距技术。
接收信号强度指示RSSI的定位方法,是在已知发射节点的发射信号强度,根据接收节点收到的信号强度,计算出信号的传播损耗,再利用理论和经验模型将传输损耗转化为距离,最后计算节点的位置。
因为理论和经验模型的估测性质,故而RSSI具有较大定位误差。
基于RSSI技术,提出一种将RSSI测量方法与三角形质心算法相结合的新型定位算法,该算法用三角形质心算法减小RSSI的测量误差。
仿真表明,该算法基于RSSI的三边测量法定位算法相比,极大提高了定位精度。
一种基于RSSI校正的三角形质心定位算法
0 引 言
节点之间 的精确距离 , 而产生较 大误差难 以达 到满意效 反
果。
无线传感器 网络 ( i l ssno e ok , N ) 微 wr e e sr t rsWS s 是 es nw 机电系统 ( MS , ME ) 片上 系统 (ytno hp S C 和无 线 ss nci ,o ) e
K yw rs i l ssno e ok ( N ) o el ai t n ee e i a s n h i i tn R S ) e od :wr e e sr t rs WS s ;nd clai ;rci ds n t g n c i ( S I ; es nw o z o v gl r t e d ao
a l t ah, i r cin, o — n -fsg t d sa c i a g .T a ge e tod a g rt m a e o h R S s mu i t d f a t p f o n n l e o- ih , i n e s r e r n l c n ri o h b d n t e S I i t l i l i s c re t n i p e e td I i i l d e o n ra e c mmu iai n e p n e wi o t h d re e p n . h o r ci s r s ne . t s s o mpe, o s n t i c e s o nc t x e s t u a wa x a d T e o h r smua in r s t s o a i ag r h g e t r v d p e iin c mp e t te g r ms I i u tb e i l t e u s h w t t h sl o t m r al i o e r cso o a d wi oh ra o t o l h t i y mp r h l i h . t ss i l a f rlw c mmu ia in e p n e l w h r wae r q i me t o iee s s n o ew r o e . o o o n c t x e s ,o a d r e u r o e n s f r ls e s rn t o k n d s w
一种基于RSSI测距的室内自适应智能定位算法
p s i iga o tm w s rsn d A esn m , e r l i ev l f a s e p n n ( L i u e oio n l rh a ee t . t h a l t e t e — m a e o t l s x o e t P E)s sdi tn gi p e t ei h at u p ho n
指数值形成 自适 应智 能定位系统。该算法能够对未知节 点 进行快速定位 , 并具有较小 的计算开销 , 定位精度 高 , 环境
干扰鲁棒性强。
1 根 轴 定 位 算 法 描 述 1 1 测 距 模 型 .
无 线 传 感 器 网 络定 位 技 术 是 用 一 些 位置 已知 的 传 感 器
受 关 注 。
现有的基 于测距的定 位技术是 依靠对数一 正态无线 传
播 模 型 用 R S 估 计 发 射 点 到 接 收 点 的 距 离 。所 以 , 体 S值 具
的 统计 模 型 如 下 “
目前 , 于接 收 信 号 强 度 指 示 ( S I 无 线 传 感 器 网 络 基 R S) 定位 算 法 有 多 种 提 高定 位 精 度 的 方 法 。 文 献 [ ] 加 权 质 6用 心算 法 通 过 信 标 节 点对 未 知 节 点 的 不 同 影 响 力来 确 定 加 权
Ke od :wr s sno n tok ( N ) ps i ig r evds nl t g dct ( si ;aiaai yw rs ies e sr e rs WS s ; oio n ; e i i a s nt i ia rR s) r cl s l w tn c e g e h n o d x 0 引 言
通过 自身 的定位 装置来 确定 那些未 知 的传 感器 的位置 信
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0. 6 ×f ( m)
2
( x- m)
≤σ 1 2πe - 2σ2
≤ f ( m)
(7)
由此式可以确定 RSSI 的选值范围 ,按照此范围对三
组 RSSI 值选值 ,并存放到 Beacon_ Val [ i ] [ j ] 中 。最终得
出的 RSSI 优化值为 :
k
∑Beacon_Val [ i ][ j ]
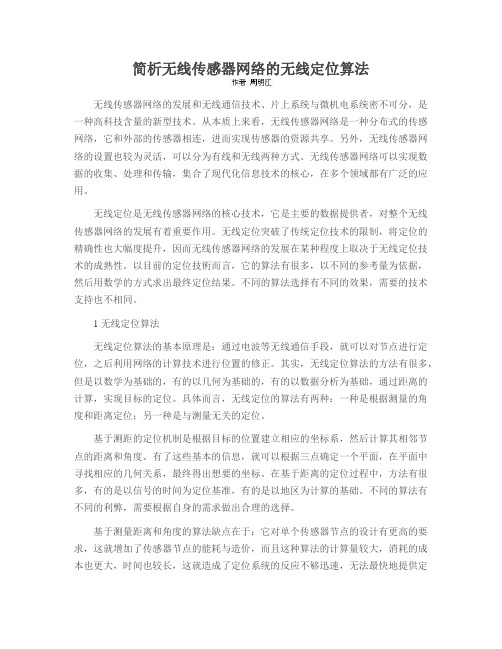
2 所示 。当未知节点与信标节点的距离越近 , RSSI 的最大
值和最小值相差越小 ,即距离与 RSSI 值的对应关系越好 ;
当未知节点到信标节点的距离越远 ,测得的数据随机偏差
也就越大 ,这个时候采集到的数据几乎不可用 。从图 2 中
可以看出敏感区常出现在 5 m 以外 。
图 1 对数 ─常态分布模型绘制的 RSSI 曲线图
3 基金项目 :国家 863 计划资助项目 (2006AA04Z208) 、天津市科技支撑重点计划 (08ZC KF GX04000)
·92 ·
张兴会 等 :基于 RSSI 测距技术的三角形面积和定位算法
第 11 期
它随距离增加而减小 。RSSI 的理论值由式 (1) 表示 :
RSSI = - (10 nlog10 d + A)
同应用环境会有所变化 。本文得出高斯模型 :
p0 = p + x0
(3)
式中 : p0 服从高斯分布 ,即 p0 ~ N [ m ,σ] ,密度函数为 :
σ 12πe f ( x) =
2
( x- m)
- 2σ2
(4)
k
∑ m =
Xi
i =1
=
X1 + X2 + … + RSSI 变化曲线 高斯分布处理数据原则 :一个信标节点在同一位置可 能收到 n 个 RSSI 值 ,其中必然存在着小概率事件 。通过 高斯模型选取高概率发生区的 RSSI 值 ,然后再取其几何 均值 。该方法解决了 RSSI 在实际测试中易受干扰 、稳定 性差等问题 ,但在长时间干扰下 ,效果就会受到影响 。
(9)
成 3 个小三角形 ,通过调整参数 n 来改变未知节点到信标 节点的距离 ,使大三角形面积与 3 个小三角形面积和之差 在 n 的变化范围内变得最小 ,最后利用三边测量法计算出 未知点坐标 ,如图 3 所示 。 2. 1 三角形面积和定位算法模型
布置信标节点 A 、B 、C ,O 为待定位节点 ,O′为实测位 置 。使未知节点出现在信标节点非敏感区内 ,信标节点分 布模型如图 3 所示 。此模型可以在满足能量损耗小 、节点 需求数少的基础上提高定位精度 。
Area summation of triangle localization algorithm based on RSSI ranging technique
Zhang Xinghui1 Zhang Zhihui1 Deng Zhido ng2
(1. Tianjin Universit y of Technology and Education , Tianjin 300222 ;2. Tsinghua Universit y ,Beijing 100084)
2 三角形面积和定位方法
为了提高定位精度 ,根据高斯模型在非敏感区筛选 RSSI 值 ,计算 A 值并调整 n 值 。三角形面积和定位算法
图 3 信标节点分布模型
·93 ·
第 31 卷
电 子 测 量 技 术
是逼近由 3 个信标节点构成的三角形的面积的方法进行 定位 。该算法是基于测距算法的一种辅助定位算法 ,通过 3 个信标节点组成一个三角形 ,使信标节点之间的距离在 非敏感区内 。然后以未知节点到信标节点的距离为边构
RSSI 值随距离增加而减小 ,信标节点通过 RSSI 值计 算出未知节点与它的距离 。电磁波能量 p 与路径 r 的关系 模型为 :
p = α( 1 ) 2
(2)
r
式中 :α为待定系数 ; p 为能量值 ; r 为距离 。
在实际应用环境中 ,由于多径 、绕射 、障碍物等因素 ,
RSSI 值与理论值有些差异 ,所以式 (2) 中的待定系数随不
摘 要 : 为了提高无线传感器网络的定位精度 ,从提高测量精度 、改善信标节点分布的角度提出了一种基于 RSSI 测 距的三角形面积和定位算法 。该算法利用高斯模型对非敏感区的 RSSI 数据进行处理 ,筛选出 RSSI 较优值 ,解决了 RSSI 易受干扰的问题 。研究表明 ,通过高斯模型筛选出的 RSSI 值可以较好的预测环境参数 ;三角形面积和算法可以 动态调整环境参数 ,使未知节点和信标节点达到合理距离 ,该算法计算简单 ,无需硬件扩展 。 关键词 : 无线传感器网络 ; 信标节点 ; 三角形面积和定位算法 ; 高斯模型 ; 非敏感区域 中图分类号 : TP393 文献标识码 : A
(1)
式中 :参数 A 被定义为用 dBm 表示的距发射端 1 m 处接
收到的信号强度绝对值 。参数 n 被定义为路径损失指数 ,
它指出了信号能量随着到收发器距离的增加而衰减的速
率 。这里 d 是发射器和接收器之间的距离 。
由于实际应用中定位信息随机性较大 ,极容易受到外
界干扰 ,故在定位算法的基础上 ,对 RSSI (信号强度指示)
传感器技术
电 子 测 量 技 术 EL EC TRON IC M EASU R EM EN T TEC HNOL O GY
第 31 卷 第 11 期 2008 年 11 月
基于 RSSI 测距技术的三角形面积和定位算法 3
张兴会1 张志辉1 邓志东2
(1. 天津工程师范学院计算机系 天津 300222 ;2. 清华大学智能技术与系统国家重点实验室 北京 100084)
现有的无线定位技术可分为基于测距的方法和无需 测距的方法[2] 。基于测距的方法是通过物理测量获得节 点之间距离 (角度) 信息的定位算法 ,其定位结果的精度在 一定程度上依赖于这些物理测量本身的精确度 。几种常
见的测量技术包括到达时间 ( Time of Arrival , TOA) 、到达 时间 差 ( Time Difference of Arrival , TDOA ) 、到 达 角 (Angle of Arrival , AOA ) 、接收信号强度指示 ( Received Signal St rengt h Indication , RSSI) 等 。典型的算法有基于 AOA 的 A PS 算 法[3] 、A HLo s ( Ad2Hoc Localization System) 算法[4] 。而无需测距的方法则不需要节点间的距 离和方向信息 ,它主要是利用节点间几何拓扑关系 (如质 心法[5] 、凸规划法[6] ) 或网络多跳路由 (如 DV2hop[7] 算法) 来完成定位 。
本文在等边三角形定位算法[8] 的基础上充分研究了 现有的测距与非测距算法 ,从测量精度与信标节点地分布 着手 ,利用高斯模型对非敏感区的 RSSI 数据进行处理 ,根 据三角形面积和算法可以动态调节环境参数 ,降低 RSSI 测距的误差 ,从而提高定位精度 。
1 RSSI 均值定位技术
RSSI 是一种指示当前介质中电磁波能量大小的数值 。
0 引 言
近年来 ,随着无线技术 、微机电系统技术的发展 ,无线 传感器网络取得了巨大的进步 。在军事 、环境 、健康 、家庭 和其他商业领域 ,无线传感器网络都有着广阔的前景 。其 中无线传感器节点定位服务在当今社会中正在扮演着越 来越重要的角色 , 它逐渐取代了传统高额费用的定位系 统 ,是一种全新的定位信息获取平台 。无线传感器节点定 位 ,即通过一定的技术 、方法和手段获取节点的绝对 (相对 于地理经纬度) 或相对位置信息的过程 。由于节点硬件配 置低 ,能量 、计算 、存储和通信能力有限[1] ,因此对节点定 位提出了较大的挑战 。
1. 1 传统模型分析 RSSI 随机数模型是指当信标节点采集到一个 RSSI 值则马
上进行定位计算 。该模型定位实时 、运算量小 ,但容易受 到外界干扰 。
统计均值模型是信标节点采集一组 n 个 RSSI 值 ,然 后求这些数据的均值 。该模型可以通过调节 n 来平衡实 时性与精确性 ,但当处理大扰动时效果不是很好 。 1. 2 高斯模型分析 RSSI[ 8]
Abstract : In order to get high p recisio n of localization in WSN ( wireless sensor network) , an area summation of t riangle localization algorit hm based on RSSI ranging technique is brought up , taking account mainly of t he measurement p recisio n and imp rovement of t he dist ributio n of beaco n nodes. This algo rit hm uses Gauss model to deal wit h t he RSSI which is got in sensitive region and t he first2class RSSI is screened o ut . The p roblem t hat RSSI is easy to be interfered is resolved. A conclusion is drawn t hat Gauss model can p redict enviro nment parameters and t he algo rit hm may adjust enviro nment parameters dynamically and distance between beaco n nodes and unknown nodes to achieve adequate. This algorit hm is easy to implement and no extended hardware are required. Keywords : WSN ( wireless seno r network) ; beacon node ; area summatio n of t riangle localization algorit hm ; Gauss model ; insensitive regio n