基于RSSI的测距差分修正定位算法_任维政
基于RSSI测距定位算法的研究和改进

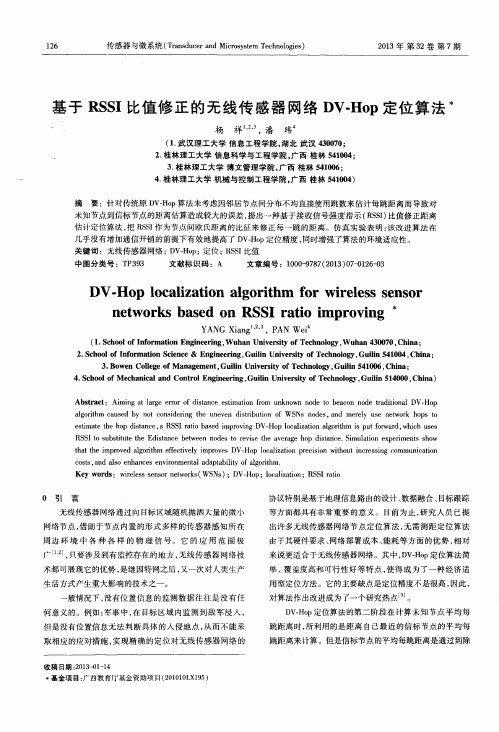
图1 应用不同环境参数的定位误差示意图
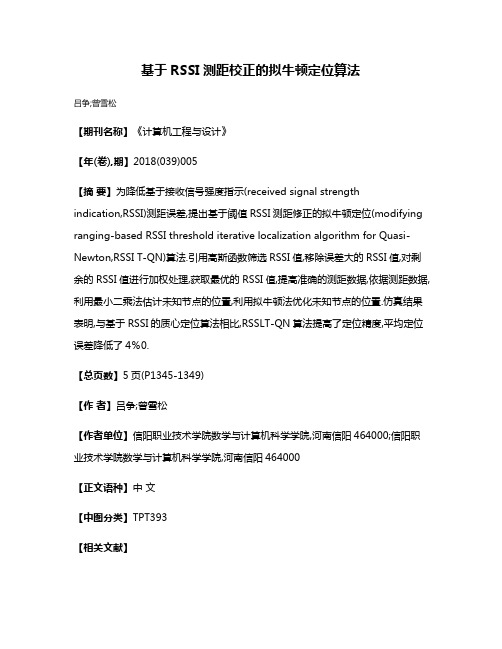
图2 子区域分割示意图
收稿日期:2017-08-18 作者简介:何沃林(1974 —),男,广东东莞人,硕士,高级工程师,研究方向:电子技术应用开发。
134
数字技术 与应用
算法分析
割的示意图。 在具体运用时,需结合室内整体布局,对子区域的分割方案予
以合理设计,尽量减少由障碍物导致的影响。在通信距离方面只需 保持在临界距离以内,不需要对子区域进行完全相等的划分。在分 割区域以后,在拟合环境参数时,以各子区域作为操作环境,最终获 得的环境参数和子区域相符。
测量时,要将参考节点设定为圆心,在半径为1米的圆周之上,有多
个参考节点平均分布,随后对圆周之上全部参考节点的RSSI值进行
测量,并进行平均值求取,具体参见如下公式(1)。
A
1
N
(RSSI )
N i1
(1)
n为传播损耗系数,环境因素的影响很大,属于一种需重点修正
的参数。由于参考节点位置坐标已知,通过和附近的参考节点测距
由此可认识到,定位精确度很大程度上会因为微小的环境参数 变化而受到影响。从室内环境来看,障碍物会把室内空间分隔成多 个相对独立的子区域,使用单一的环境参数无法适用于整体区域。
1.3 信号干扰 (1)突发干扰。测量RSSI值时,不论是环境的突然改变、还是人 员走动等,均会对此产生突发干扰。因为突发干扰的存在,对RSSI值 产生了显著影响,且比障碍物存在于信道时的影响程度明显更高。 (2)随机干扰。信号在传播过程中受到信号反射、衍射以及测量 节点内部噪声和量化噪声等因素的影响,使得节点测量获得的RSSI 数值产生随机误差[2]。在RSSI测量进程中,随机干扰持续存在,使测 量值不断波动,而且因为无规则变化,使得其数值的正负、大小等无 法被预测[2]。 (3)噪声干扰。RSSI值测量的整体进程均会受到噪声影响,使得 最终获得的是噪声和测量值混合后的数据[3]。对比随机干扰导致的 RSSI数值波动,噪声干扰之下的数值波动显然更强,而导致较大脉 冲的出现,数据变化更无规律可循[3]。
无线传感器网络中基于RSSI差值的改进定位算法

在低 功率 高密度 无 线 设 备 组 成 的 网络 中, 由于 同
步 的原 因 , 使得 T OA 往 往 比较 难 实 现 . 多 径 和 噪 D 而
差为d r 的零 均值 正态 分 布随 机变 量 , L R ) P ( 。 为对应 R 。 处 节点 的接 收信 号强 度值 .
应信 标节 点 库 , 而 对 不 同位 置 范 围 的 待测 节 点 优 化 选 取 其 定 位 采 用 的 信 标 节 点 , 继 最后 将 由未 知 节 点 接 收 到 的信 号 强 度 得 到 的多 用 户 间 的距 离 进 行 差值 , 化 求 解 非 线 性方 程组 , 高 算 法 性 能 . 真 结 果 表 明 , 文 中 的 R S WS 差 值 定 位 优 提 仿 本 SI N 算 法 比传 统 的 RS I 位 算 法 拥 有 更 好 的定 位 性 能 . S定
径, 很难 精 确 的进 行 TOA 或 T DOA 估 计 . 在 R 而 A—
D 【 ,p t 5等 许 多 项 目 中使 用 到 的 R S 技 AR 4 S oON[ ] ] SI 术 , 需设 备简单 , 一种低 功 率 、 成本 的测距 技术. 所 是 低
1 2 多用 户 R S 差 值 定 位 算 法 . SI
20 年 5 08 月
无 线传 感器 网络 中基 于 R S 差 值 的 改进 定 位 算 法 SI
徐 燕 , 江 宏 , 晓 芳 石 吴
( 门 大 学 信 息 科 学 与技 术 学 院 , 建 厦 门 3 1 0 ) 厦 福 60 5
、
摘要: 无线传感器网络( N 的许多应用都需要知道节点的位置, WS ) 在某些环境下还需要获得节点的相对位置. 本文以
基于RSSI比值修正的无线传感器网络DV-Hop定位算法
n e t wo r ks ba s e d 0 n RS S I r a t i o i mp r o v i ng
YANG Xi a n g .PAN We i
( 1 . S c h o o l o f I n f o r ma t i o n E n g i n e e r i n g , Wu h a n Un i v e r s i t y o f T e c h n o l o g y , Wu h a n 4 3 0 0 7 0 , C h i n a ; 2 . S c h o o l o f I n f o r ma t i o n S c i e n c e& E n in g e e r i n g , Gu i l i n U n i v e si r t y o f T e c h n o l o g y , Gu i l i n 5 4 1 0 0 4 , C h i n a ;
杨 祥 , 潘 玮
( 1 . 武汉理工大学 信息工程学院, 湖北 武汉 4 3 0 0 7 0 ;
2 . 桂林理工大学 信息科学与工程学院 。 广西 桂林 5 4 1 0 0 4 : 3 . 桂林理 工大 学 博文管理学院 , 广西 桂林 5 4 1 0 0 6 : 4 . 桂林理工大学 机械 与控制工程学院 , 广西 桂林 5 4 1 0 0 4 ) 摘 要 :针对传统原 D V — H o p算法未考 虑因邻居节点间分布不均直接使用跳数来估计 每跳距离而导致对
关键词 :无线传感器 网络 ; D V — H o p ; 定位 ; R S S I比值
中 图 分 类 号 :T P 3 9 3 文 献 标 识 码 :A 文章 编 号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 3 ) O 7 01 - 2 6 - 0 3
基于RSSI的无线传感器网络修正加权质心定位算法

基于RSSI的无线传感器网络修正加权质心定位算法
刘运杰;金明录;崔承毅
【期刊名称】《传感技术学报》
【年(卷),期】2010(023)005
【摘要】提出了一种基于接收信号指示强度(RSSI)的修正加权质心定位算法,它区别于以往的加权质心定位算法,在该算法中采用测试距离倒数之和代替距离和的倒数作为权重,同时提出了修正系数的概念,避免了信息淹没现象,提高了定位精度.仿真结果表明,本文算法定位精度较之前的加权质心定位算法有了明显提高,最高可达17.83%.
【总页数】5页(P717-721)
【作者】刘运杰;金明录;崔承毅
【作者单位】大连理工大学电子与信息工程学院,辽宁,大连,116024;大连理工大学电子与信息工程学院,辽宁,大连,116024;大连理工大学电子与信息工程学院,辽宁,大连,116024
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于RSSI的无线传感器网络加权质心定位算法 [J], 陈维克;李文锋;首珩;袁兵
2.基于修正RSSI值的加权质心定位算法 [J], 陈璇;董仕鹏
3.无线传感器网络中基于RSSI的改进加权质心定位算法 [J], 施伟;高军
4.基于RSSI测距修正的无线传感器网络四边形加权质心定位 [J], 陈业海;郑日荣;许亮
5.基于RSSI的改进差分修正加权质心定位算法 [J], 余学帆;王宏志;韩博;曹学瑶;胡黄水
因版权原因,仅展示原文概要,查看原文内容请购买。
基于RSSI测距校正的拟牛顿定位算法
基于RSSI测距校正的拟牛顿定位算法吕争;曾雪松【期刊名称】《计算机工程与设计》【年(卷),期】2018(039)005【摘要】为降低基于接收信号强度指示(received signal strength indication,RSSI)测距误差,提出基于阈值RSSI测距修正的拟牛顿定位(modifying ranging-based RSSI threshold iterative localization algorithm for Quasi-Newton,RSSI T-QN)算法.引用高斯函数筛选RSSI值,移除误差大的RSSI值,对剩余的RSSI值进行加权处理,获取最优的RSSI值,提高准确的测距数据,依据测距数据,利用最小二乘法估计未知节点的位置,利用拟牛顿法优化未知节点的位置.仿真结果表明,与基于RSSI的质心定位算法相比,RSSLT-QN算法提高了定位精度,平均定位误差降低了4%0.【总页数】5页(P1345-1349)【作者】吕争;曾雪松【作者单位】信阳职业技术学院数学与计算机科学学院,河南信阳464000;信阳职业技术学院数学与计算机科学学院,河南信阳464000【正文语种】中文【中图分类】TPT393【相关文献】1.基于粒子滤波的RSSI测距优化的牛顿定位算法 [J], 罗阳倩子;廖威2.基于人工神经网络的RSSI测距的牛顿定位算法 [J], 李英玉;陈刚3.基于RSSI差分校正的最小二乘-拟牛顿定位算法 [J], 程秀芝;朱达荣;张申;朱广4.基于测距修正和位置校正的RSSI定位算法 [J], 王伟;陈岱;周勇5.煤矿井下基于RSSI校正测距的WSN节点定位算法 [J], 李永新;赵振民;李雅莲因版权原因,仅展示原文概要,查看原文内容请购买。
基于 RSSI 修正的近似三角形加权质心定位算法

基于 RSSI 修正的近似三角形加权质心定位算法童莉;周鸣争【摘要】节点的自身定位技术是无线传感器网络研究的核心技术,具有广泛的应用前景。
针对基于 RSSI 测距技术的节点定位算法存在测量误差相对较大的缺陷,提出一种基于 RSSI 修正的近似三角形加权质心定位算法。
该算法针对 RSSI 测距易受环境干扰,对测距数据进行高斯拟合和求均值,并以此作为节点的 RSSI 测量值。
在此基础上,利用排序算法对测距结果进行排序,优选信标节点做三角形内点测试,最后采用加权质心定位算法来确定未知节点的坐标。
仿真结果表明,改进算法改善了节点的定位精度。
%In wireless sensor networks,the node localization is one of the core technologies,which has a wide promising application.Because the error of measurement is relatively large in the node localization algorithm based on RSSI distance measurement,a new approximate triangular weighted centroid localiza-tion algorithm based on RSSI correction is proposed.The algorithm according to the RSSI ranging is easi-ly interfered by the environment,so the paper applies Gauss fitting and mean value to the ranging data, and regards it as the node of RSSI measure-ment value.Based on this,sorting algorithm is used to sort the ranging results,and then the authors preferred beacon node to triangle point test.Finally,weighted centroid localization algorithm is used to determine the coordinates of the unknown nodes.The simulation results show that the improved algorithm enhances the localization accuracy of the nodes.【期刊名称】《安徽工程大学学报》【年(卷),期】2015(000)004【总页数】5页(P62-66)【关键词】无线传感器网络;节点定位;RSSI 测距;高斯拟合;加权【作者】童莉;周鸣争【作者单位】安徽工程大学计算机与信息学院,安徽芜湖 241000;安徽工程大学计算机与信息学院,安徽芜湖 241000【正文语种】中文【中图分类】TP393无线传感器网络(WSN)是一种全新的信息获取技术和处理平台,由大量处于移动或静止状态的传感器节点组成.这些节点的硬件成本较低、体积结构较小,可以通过机器撒播或是人工部署的方式被随机安置在监测区域内,通过节点本身携带的具有无线通讯功能的收发装置,可以自组织形成具有多跳结构的网络系统.该网络可以协同感知目标对象的多维信息(温度、噪声、压力、湿度、光强度等),在网络中处理发布采集到的数据信息,以实现对目标区域的监测,为终端用户提供决策支持.因此,无线传感器网络节点自身的定位信息是其他很多应用的基础,离开了位置信息,传感器网络中的某些控制信息就会变得毫无意义.目前,根据是否需要在定位过程中直接测量节点间的距离,WSN的节点定位算法主要包括基于测距(range-based)和基于非测距(range-free)两种.前者主要是通过测量相邻传感器节点的距离、方位角度等信息,然后使用三边测量、三角测量、最大似然估计等定位算法建立数学模型,估算出节点位置,从而获得被测未知节点的实际位置.常采用的测距技术包括RSSI(received signal strength indicator)[1]、AOA (angle of arrival)、TOA(time of arrival)和TDOA(time difference on arrival)等;而后者则主要是利用节点间的连通性和邻接关系等信息来实现定位,常用的非测距算法主要包括质心算法[2]、DV-Hop算法[3]、APIT算法[4]等.上述两种节点定位算法中,基于测距的定位算法的定位精度相对较高.其中,基于RSSI测距技术的方法具有成本低且复杂度低的优势,是目前无线传感器网络中较常用的一种方法.但是,基于RSSI测距技术的方法是通过RSSI衰减模型计算得出的节点距离,在实际环境中由于各种复杂因素影响测距值,导致测距误差较大.因此,首先对RSSI测距数据方法进行了修正,通过对无线信号传播模型和采集的数据进行分析和研究,利用高斯拟合处理数据进行首次过滤,并采用求平均值作二次处理,最后通过优选信标节点,进行近似三角形内点判定,采用加权质心定位算法得出未知节点的定位坐标,以期提高原算法的定位精度,达到更好的定位效果.无线传感器网络采用的无线信号传播模型主要有3种:自由空间传播模型(Free-Space)、对数距离路径损耗模型和对数正态分布模型(Shadowing).在理想的环境下进行信号传播,在自由空间中,接收信号强度与传输距离的平方是成反比的,具体公式如下所示:式中,Pr(d)表示接收信号的功率;Pt代表发射信号的功率,都是关于距离的函数;Gr表示接收天线增益;Gt表示发射天线增益;d表示发射信号和接收信号的两个节点之间的距离;λ是发射信号的波长;L是与传播无关的系统损耗因子(L≥1).这里取参考距离d0的值为20 cm,即0.2 m,由式(1)可以计算出P0(d0)的值,其中,Gt,Gr和L的值均取1来计算.采用CC2430无线单片机作为传感器节点的核心芯片,它支持RSSI监测功能,其值可以通过编程读出.在50 m∗50 m的实验场地上进行测试实验,测试结果如图1所示.由图1可知,当测试节点和信标节点的距离较大时,射频信号衰减的速度比较慢.反之,当传输距离减小时,信号衰减就会相对较快.即在测距过程中,接收到的RSSI测量值随着发射端和接收端的传输距离增大,衰减速度变小.通过测距实验发现,同一个RSSI值对应的距离并不是一一对应的关系.实验中又选择了2组RSSI值进行统计,发现因信号受干扰,在整个测量过程中,同一个距离的信号会出现很多值,这对RSSI的测距模型和公式带来了相当大的测量误差.70 dBm 和85 dBm两组RSSI值得到的统计图如图2所示.通过对实验数据进行分析,发现数据在某个位置的RSSI值是一个概率问题,而测量值和实际值最为接近的地方即是概率分布密度最大的地方.为达到滤除部分失效数据的目的,可以通过对数据进行高斯拟合来找出密度最大的波峰值.对于测量得到的数据,文中采用了高斯函数拟合来进行采集数据的修正,用以剔除数据中那些“误差”较大的点.设置一个门限值n,利用此值让发送节点连续进行信号发送,而同一位置的接收节点接收到的一组共n个RSSI测量值,然后建立高斯函数的数学模型,并对接收到的所有RSSI测量数据进行拟合处理:其中,其中,用xi来表示发射节点在第i次进行信号传送时,接收节点所得到的RSSI测量值.然后通过式(3)和式(4)计算可以得到该高斯函数的数学期望值和方差值,从而确定分布函数,再为其设定一个阈值m,分别计算出f(xi)的值.当f(xi)<m时,就将RSSI的测量值剔除出去;当f(xi)≥m时,将RSSI测量值保留下来.最后,对保留下来的所有RSSI测量值通过式(5)进行平均值计算,并以此作为该节点的RSSI测量值.2.1 优选参考信标节点一般来说,未知节点到信标节点的距离越近,由RSSI值的偏差产生的绝对距离误差就越小,那么定位的精度自然就越高.设置两个信标节点的真实坐标分别为(xi,yi)和(xj,yj),根据式(6)进行计算,得两个信标节点之间的实际距离值:再通过公式(7)计算得出未知节点与其他信标节点之间的估算距离d估:在计算求出|d实-d估|的差值后,对计算结果按照数值从小到大进行排序,建立与排序后的距离大小顺序相对应的优选参考信标节点集合:式中,Pr(d)是经过距离d后的路径损耗;P0(d0)是参考距离为d0时的路径损耗;β是路径损耗指数;Xσ是均值为零的高斯分布正态随机变量,标准差为σ,方差为σ2(即Xσ~N(0,σ2)).忽略掉Xσ对计算的影响,并将β的取值设为3,由式(8)可以推导出式(7),进行距离值的转换计算.2.2 建立近似三角形集合对优选后的参考信标节点集合任取3个节点组成一个三角形,在用近似三角形内点测试法进行判断未知节点是否位于此三角形内部,重复这一步骤直到整个集合中的3点组合全部完成判断.将所有可以把未知节点包含在内部区域的三角形组合成新的近似三角形集合,并统计集合中元素的个数.2.3 加权质心定位算法[6]未知节点的坐标(xi,yi)可由式(9)计算得出.式中,d1,d2,d3表示未知节点与信标节点的距离; (x1,y1),(x2,y2),(x3,y3)为从通过三角形内侧点判定的优选信标节点集合中任意组合的三角形.通过上述算法计算出的未知节点的3个估算坐标值.最后对所有求解出的未知节点坐进行均值计算,其结果作为最终的未知节点的位置坐标.文中提出的改进算法是基于原有RSSI测距的三角形质心定位算法上的,因此,仿真的主要目的就是为了验证改进后的定位算法相较原算法是否在定位精度上有所提高.在使用MATLAB 2013进行仿真的过程中,编程时对其中的某些主要参数进行了相关设置,主要包括:①设置一个正方形的监测区域,其范围大小为100 m×100 m;②设置节点的通信半径为50 m(节点的通信半径一般在10~100 m左右);③设置WSN中的节点个数.其中,信标节点的总个数为30个,未知节点的总个数为70个,节点的位置坐标是利用MATLAB 2013随机生成函数并随机分布的.WSN网络的节点具体分部如图3所示;④设置RSSI距离测量公式中的路径衰落因子值为3(它的一般取值在1.5~5之间).参数设置完成后,编程实现算法仿真.通过仿真发现,改进前的定位算法误差始终在5.8 m左右.而改进后的定位算法误差的大小会随着权重因子的取值不同而发生变化.当权值为1时,整个算法的定位误差最大;而定位误差最小的取值可以达到在2.3 m左右.改进前后定位算法对定位误差的影响如图4所示.通过用MATLAB 2013进行仿真,当采用基于RSSI的无线传感器网络加权质心定位算法进行定位时,未知节点的定位效果图如图5所示.由图5可知,未知节点的坐标估计的平方误差为1.3539e+04.而本文所给出的基于RSSI测距修正的改进加权质心定位算法,通过仿真得到未知节点的定位效果图如图6所示.由图6可知,未知节点的坐标估计的平方误差为6.8413e+03.通过比较可以发现,相较于改进前的定位算法,后者在定位误差上有了明显改善,达到了预期效果.对无线传感器网络的定位算法进行了深入研究,提出了一种基于RSSI测距修正的近似三角形加权质心定位算法.重复多次试验,从仿真实验结果来看,改进后的定位算法提高了节点的定位精度.【相关文献】[1] 詹杰,刘宏立,刘述钢,等.基于RSSI的动态权重定位算法研究[J].电子学报,2011,39(1):82-88.[2] N Bulusu,J Heidemaim.Estnn D GPS-less low-cost outdoor localization for very small devices[J].IEEE Personal Communications Magazine,2000,7(5):28-34.[3] D Nieuleseu,B Nath.DV based positioning in ad hoc networks[J].In Journal of Telecommunication Systems,2003, 22(1-4):267-280.[4] 黄春华,韦海清.基于RSSI测距误差修正的方法[J].传感器世界,2014,20(4):31-35.[5] 杨文铂,邢鹏康,刘彦华.一种基于自适应RSSI测距模型的无线传感器网络定位算法[J].传感技术学报,2015,28(1): 137-141.[6] 林玮,陈传峰.萃于RSSI的无线传感器网络三角形质心定位算法[J].现代电子技术,2009(2):181-182.。
基于RSSI测距滤波优化的加权质心定位算法
基于RSSI测距滤波优化的加权质心定位算法艾华;李艳【摘要】在基于接收信号强度RSSI(received signal strength index)测距定位算法中,RSSI的测距误差直接影响着定位精度.为此,提出基于RSSI滤波优化的加权质心定位算法(weighted centroid localization algorithm based on Gaussian filter RSSI,WC-RSSI).利用最小二乘法测量信号传输环境的参数,通过高斯滤波摒弃劣质的RSSI值,优化RSSI值,通过测距模型将RSSI值转换成距离,引用加权质心定位算法计算节点位置,实现节点定位.仿真结果表明,利用最小二乘法的环境参数估计误差低于2.5%,与传统的质心定位算法相比,WC-RSSI算法的均方定位误差得到有效地下降.%In received signal strength index (RSSI)-based ranging localization algorithm,the measurement error of RSSI-based ranging plays key role on localization precision.Therefore,weighted centroid localization algorithm based on Gaussian filter RSSI (WC-RSSI) wasproposed.Environmental parameters were estimated using least squares method,the poor RSSI values were abandoned and RSSI values were optimized using Gaussian filter.The RSSI values were converted into distance using measurement model,and the unknown node coordinates were calculated using weighted centroid localization.Simulation results show that the relative error of environment parameter estimation is less than 2.5 %,and the precision of WC-RSSI algorithm is greatly improved than that of the centroid localization algorithm.【期刊名称】《计算机工程与设计》【年(卷),期】2017(038)010【总页数】5页(P2631-2635)【关键词】接收信号强度;最小二乘法;高斯滤波;质心定位;无线传感网络【作者】艾华;李艳【作者单位】廊坊燕京职业技术学院计算机工程系,河北三河065200;河北大学数学与计算机学院,河北保定071002【正文语种】中文【中图分类】TP393受硬件条件和无线环境因素的制约,在WSNs中对传感节点的定位仍是一项挑战的工作。
基于RSSI的室内定位算法
3.1三边测量法 本文采用三边测距法进行定位,通过未知节点得到的三个RSSI值,由式(1)可以得到未知节点到该三
个信标节点的距离,Pi到P的距离记为山,p2到p的距离记为d2,p3到p的距离记为d3,则未知节点的位置 应该在以Pi,P2,P3为圆心? di, d2, d3为半径的圆相交的部分之内,即图1中A、B、C点范围之内。 3. 2定位算法
(1)
其中:PL(d)为距离d处的信号强度;PL(dO)为距离d0处的信号强度,一般d0 = l. 0m;xa表示是一个 服从N(叫孑)的高斯随机变量。
在实际测量时,未知节点在同一位置可以接收到多个RSSI值,由于多径传播、反射等因素的影响,实际 的RSSI值和理论RSSI值存在一定的差异,该差异主要体现在xo上。运用高斯分布函数处理RSSI值:
近年来,各种定位技术发展迅速,室内精确定位服务的需求量大增,基于位置的服务LBSCLocation— Based Services)也越来越受到人们的关注口」。对于室外定位,目前主要有美国的GPS(Global Positioning System)全球定位系统、俄罗斯的GLONASS系统和中国的北斗系统。然而,卫星信号强度受环境影响衰减 较大,导致建筑物或树木密集区以及室内无法使用其定位。目前,WIFI被广泛使用于城市公共接入热点, 很多办公室、家庭都实现了 WIFI全覆盖,因此,将WIFI引入室内定位,不但能大大降低部署成本,而且能保 证室内定位或复杂环境下定位的进度及覆盖率。
基于RSSI路径损耗因子动态修正的三边质心定位算法
基于RSSI路径损耗因子动态修正的三边质心定位算法张宏刚;黄华【摘要】To solve the poor positioning accuracy problem caused by environmental interference,the paper proposes a trilateral centroid algorithm that according to the actual environment to dynamically adjust the path loss factor n. Firstly,the author measures the corresponding relationship between RSSI and n with different distances in the actu⁃al environment. Then considering the partial similarity of interference factors,the author revises a dynamic nR by us⁃ing the new measured RSSI and the corresponding relation,which fully reflects the closely relationship between the n and environment factors. Finally,the paper uses the trilateral centroid algorithm to locate the points. Simulation shows that the algorithm reduces the error caused by environmental interference,and significantly improves the po⁃sitioning accuracy.%针对无线传感器网络节点定位受环境干扰精度较差的问题,提出了一种将路径损耗因子n根据实测环境进行动态修正的三边质心定位算法。
无线传感器中基于比较RSSI值的节点定位算法
无线传感器中基于比较RSSI值的节点定位算法1 引言:节点定位[1]是指确定每个传感器节点在网络中的位置坐标。
为了提供有效的位置信息,随机部署的传感器节点必须能够在部署后确定自身位置。
节点定位在传感器网络体系中占有重要的地位。
通过网络内部节点之间的互相测距与信息交换,形成一套整网节点的坐标。
2 移动信标节点定位机制密集地部署信标节点,使用的信标节点越多,部署整个网络的开销越大,造成的浪费越多。
有鉴于此,文献[2]提出基于移动信标节点(Mobile Beacon)进行定位的思想,让一个或多个信标节点在监控区域中移动,同时发送无线电信号,未知节点可据此测定自身与信标节点的相对距离或角度,然后根据多个测定结果进行定位。
2.1传统的RSSI算法根据文献[3],有以下对数正态屏蔽模型(log-normal shadowing model)(1)其中,PT表示发射功率,PL(d0)表示d0的路径损耗,d0表示相关距离,则PL(d0)的典型值为55dB;η表示路径损耗指数,Xσ表示正态分布随机量Xσ=N(0,σ2),RSSI 的度量为dBm。
图1RSSI与距离的关系[4]图中可看出RSSI值随距离的变大而变小,接受信号强度(dB值)与距离的关系很难稳定得到,对RSSI定位精度有很大影响。
而基于无线传感器网络的目标跟踪系统对定位精度要求较高,需要在这种定位方法的基础上进行改进。
2.2基于比较信标RSSI值的节点定位针对RSSI值与物理距离是成反比的这种现象,本文提出基于比较信标RSSI 值的节点定位(Compare RSSI,简记CR)算法。
为说明CR算法的工作方式,以图2为例。
图中的黑线表示移动信标的轨迹,箭头代表信标节点的运动方向。
移动信标节点在P1点开始移动,在P2点转换方向,在P3点停止。
由P1 P2 P3三点我们可以构造处一个虚拟的三角形。
图2 CR算法设R为信标节点信号的传播半径,为确保虚拟三角形内的所有未知节点都能接收到信标节点的信号,虚拟三角形的边P1 P2和P2 P3长度应小于同时,这两边的夹角θ应满足0<θ≤π/2。