载波相位差分接收机自主完好性监测研究
卫星导航系统知到章节答案智慧树2023年哈尔滨工程大学

卫星导航系统知到章节测试答案智慧树2023年最新哈尔滨工程大学第一章测试1.北斗三号系统空间星座由()颗GEO、()颗IGSO和()颗MEO卫星组成,并视情部署在轨备份卫星。
参考答案:3、3、242.北斗二号卫星导航系统服务的范围是:参考答案:亚太3.全球四大卫星导航系统中,可以实现通讯功能的是:参考答案:BDS4.全球四大卫星导航系统中,在空间段同时使用MEO、IGSO和GEO三种轨道类型的卫星导航系统是:参考答案:BDS5.1994年国家批准建设“北斗一号”卫星导航定位系统并确定“三步走”战略,“三步走”的顺序为:参考答案:区域有源、区域无源、全球无源6.以下属于卫星导航的特点的有:参考答案:精度高;覆盖范围广 ;实时性;全天候7.卫星导航系统地面控制段包括哪几部分。
参考答案:主控站;注入站;监测站8.卫星导航系统就是指GPS。
参考答案:错9.星基增强系统是可以独立运行的GNSS。
参考答案:错10.卫星导航信号主要由载波、测距码和导航电文组成。
参考答案:对第二章测试1.为满足在全球范围内使用的需求,全球导航卫星系统采用的坐标系通常是一种:参考答案:地心坐标系2.以下卫星导航时间系统表现形式为周和周内秒的有:参考答案:GPS时 ;Galileo时;北斗时3.北斗D1导航电文每个主帧包含多少个子帧:参考答案:54.码分多址的特点有:参考答案:抗干扰;抗频率选择性衰落;灵活性;频带利用率高5.伪随机噪声码是一种可以预先确定并可以重复地产生和复制,具有白噪声随机统计特性的二进制码序列,简称为伪随机码或伪噪声码或伪码。
参考答案:对6.在扩频通信中,直接序列扩频是指用高码率的扩频码序列在发端直接去扩展信号的频谱。
参考答案:对7.用于详细描述卫星导航系统信号体制的文件一般称为接口控制文件,它的英文简称是。
参考答案:ICD8.播发D2导航电文的北斗卫星是:参考答案:GEO卫星9.信噪比的大小通常与噪声带宽无关。
全球定位系统(GPS)术语及定义
全球定位系统(GPS)术语及定义全球定位系统(GPS)术语及定义【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:151范围本标准规定了全球定位系统(GPS)常用术语及定义。
本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。
2通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NA VSTAR)一种卫星导航定位系统。
由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。
包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。
2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。
包括军用和民用两种服务。
2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念。
GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。
并将由多国民间参与运行和控制的卫星导航系统。
GNSS也已经为国际海事组织(IMO)所接受。
欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。
GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。
2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。
2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。
差分GPS系统有什么作用?(上)
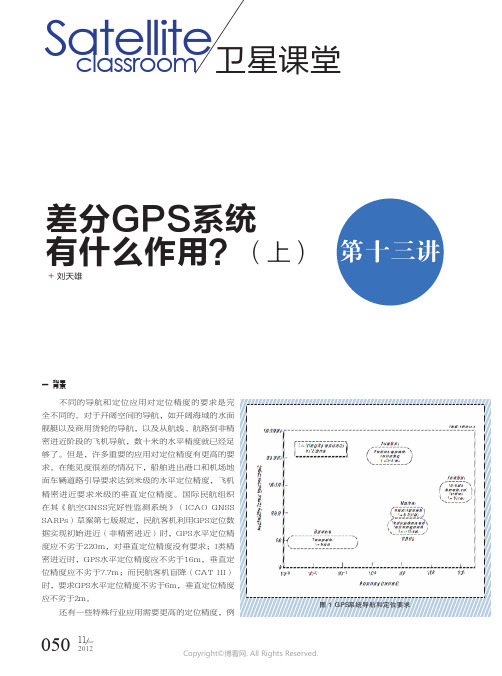
Nov2012Satelliteclassroom卫星课堂图1 GPS系统导航和定位要求差分GPS系统有什么作用?(上)第十三讲一 背景不同的导航和定位应用对定位精度的要求是完全不同的。
对于开阔空间的导航,如开阔海域的水面舰艇以及商用货轮的导航,以及从航线、航路到非精密进近阶段的飞机导航,数十米的水平精度就已经足够了。
但是,许多重要的应用对定位精度有更高的要求。
在能见度很差的情况下,船舶进出港口和机场地面车辆道路引导要求达到米级的水平定位精度,飞机精密进近要求米级的垂直定位精度。
国际民航组织在其《航空GNSS完好性监测系统》(ICAO GNSSSARPs)草案第七版规定,民航客机利用GPS定位数据实现初始进近(非精密进近)时,GPS水平定位精度应不劣于220m,对垂直定位精度没有要求;I类精密进近时,GPS水平定位精度应不劣于16m,垂直定位精度应不劣于7.7m;而民航客机盲降(CAT III)时,要求GPS水平定位精度不劣于6m,垂直定位精度应不劣于2m。
还有一些特殊行业应用需要更高的定位精度,例+ 刘天雄050Copyright©博看网. All Rights Reserved.Satellite& Network如,水库或水电站的大坝由于水负荷的重压而产生变形,危及坝体的安全,需要对大坝外观变形进行连续而精密的监测,监测精度要求为亚毫米级。
滑坡是指在一定环境中斜坡岩土在重力作用下,由于内外因素的影响,使其沿着坡体内一个或几个软弱面(带)发生剪切下滑现象。
对水库、山区高速公路、铁路等附近区域滑坡体的三维变形实时监测,规避山体滑坡造成的民众人身安全风险十分必要,监测精度要求为毫米级。
如此高的定位精度要求仅仅单独靠GPS系统是无法实现的。
大地测量、航空和航海等GPS系统高端用户对定位精度和导航信号完好性要求如图1所示。
如何进一步提高GPS导航和定位的精度呢?要解决这个问题,就要先了解差分GPS。
基于星载接收机的导航卫星自主信号监测理论研究
GP S第 1 9号 卫 星 的伪 随 机信 号 因背 离 了规 范 形 式 引起 了伪距 错误 。因此 , 当参 考源 和接 收机 在它
自主信号 监测 方案 , 能够相 对 容易地 解决 上面提 到 的技术 问题 。在 这 种 情 况 下 , 旦 卫 星发 生故 障 , 一 卫 星 自身 就 立 刻 把 警 告 信 息 广 播 到 用 户 接 收 端 。 而且 在导航 卫星上 的信 号 质 量 监 测 的计 算 量 比在 L AAS或者 G AS 基 于地 面的增 强系 统 ) 要 少 , B ( 上 因为每 一颗卫 星 自主 信 号监 测 只监 测 与这 个 卫 星
息 随着 时 间的变化 而 引入误 差 。
收 稿 日期 :0 80 — 3 2 0—31
・
7 ・ 4
GNS o l fChn / 0 8 3 SW 时 钟 加 速 度 : 一 颗 GP 每 S卫 星 的 核 心
用户 注意 , 这种 快速 的检测 和判 断能力 超过 了 目前
已经 提升 到 了 一个 崭新 的 高 度 , 其 是 在 民航 领 尤 域 , 界各 国不 断增 加 的机场 吞 吐量对 卫星导 航 系 世 统高 精度导 航定位 数 据 能 够 容忍 的故 障 信 号空 间 很小 。此 外 , 一些 关 系 到 生命 安 全 的领 域 , 比如搜 索和 营救 、 部高精 度精 确导 航等 对卫 星导航定 位 局 系统 的可靠 性提 出了新 的挑 战 。现 已建 成应 用 的 局域增 强 系统 ( AAs 和 广域 增 强 系统 ( L ) WAAs ) 虽能 满足介 于非精 密 进 场 着 陆与 I类 进 场着 陆 级 别之 间的导航 定位精 度 和完好 性 的要求 , 但建设 这 样 的增 强系统 不 仅技 术 十 分 复 杂 , 且 费用 昂贵 , 而 并且在 快速修 复用 户 错 误信 息 的技 术 上 还存 在 很 大 困难 。使用 接收 机 自主完 好 性 监 测 来 支持 假 想 的错误 信号 , 通常 情 况 下 降低 了用 户 的定 位 精 度 , 而 且 当导航卫 星发生 故 障后 , 这些技 术都 是通过 放
【国家自然科学基金】_gnss接收机_基金支持热词逐年推荐_【万方软件创新助手】_20140730
科研热词 gnss 高速数据采集 软件接收机 系统仿真 扩展卡尔曼滤波 导航 在线定位 全球导航卫星系统 信号跟踪 信号捕获 usb2.0 ppp gps fpga
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1
科研热词 gnss gps 高动态 跟踪环路 无模糊跟踪 射频前端 全球导航卫星系统 高采样率 鉴相误差 鉴相方法 采样率选择 近实时 输出信干噪比 载波频率 载波相位测量 载波环路 质量控制 误差模型 补偿 自适应数字波束形成 自适应增益控制 精密时间 精密单点定位 矢量跟踪 相关器 相位噪声 直接射频采样 电离层修正 环路带宽 环路增益 混合模式 深组合 波束数目 气象监测 晶振 时间服务 无味卡尔曼滤波 数据分析中心 接收机钟跳 捷联惯性导航系统 抗干扰 抗差估计 抑制 强干扰 干扰抑制 小波包分解 导航接收机 导航 定轨定位 定轨 大气掩星 多速率信号处理
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
ห้องสมุดไป่ตู้
2011年 科研热词 精密单点定位 全球导航卫星系统 预检测积分 钟差确定 鉴相器 通信技术 载波环路 软件接收机 虚拟应答器 组合导航 精密定轨 相关距离 用户自主式完备性监测 欧洲定轨中心 模数转换器 标准altboc 查表法 斜向电离层总电子含量 改进的rake 捕获算法 抗多径 恒定包络altboc 差分码偏差 工作带宽 完备性 多模gnss 多星座组合 双码a1tboc 北斗 列车定位 全球定位系统 panda软件 gnss数字接收机 gnss接收机 gnss fpga 推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
GPS专业术语
4.9惯性导航系统inertial navigation system(INS)利用惯性仪表(陀螺仪和加速度计)、参考方向和初始位置来测量载体运动方向、速度【中华人民共和国国家标准GB/T 19391-2003 】1 范围本标准规定了全球定位系统(GPS)常用术语及定义本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面2 通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NAVSTAR)一种卫星导航定位系统由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息包括军用和民用两种服务2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务并将由多国民间参与运行和控制的卫星导航系统GNSS也已经为国际海事组织(IMO)所接受欧洲的GNSS计划分为两个阶段即GNSS-1和GNSS-2GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能兼有简短报文通信能力2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息注:已于l997年12月31日关闭2.7国际GPS动力学服务international GPS geodynamics service(IGS)国际大地测量协会于1994年创立的国际GPS研究服务机构它负责向世界各国的GPS用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息2.8GPS空间段GPS space segment指GPS的空间星座它按设计由分布在6个轨道平面上的24颗导航卫星组成,卫星向地球方向广播含有测距码和数据电文的导航信号2.9GPS地面控制段GPS ground control segment指GPS的地面监测和控制系统,它包括主控站、卫星监测站和上行信息注入站(又称地面天线)以及把它们联系起来的数据通信网络2.10GPS用户段GPS user segment指各种GPS用户终端其主要功能是接收卫星信号,提供用户听需要的位置、速度和时间等信息2.11Block ⅠⅡ,ⅡA,ⅡRⅡR-M,ⅡFⅢ卫星Block Ⅰ,Ⅱ,ⅡA,ⅡR,ⅡR-M,ⅡF,Ⅲsatellites指GPS的各代卫星的名称Block Ⅰ是原型卫星;BlockⅡ和ⅡA是目前的基本工作卫星;Block ⅡR和ⅡR-M是正在发射的替补卫星;Block ⅡF是后继卫星 Block Ⅲ是在规划中的2010年以后发射的卫星2.12伪卫星pseudolite设立在地面上的GPS信号发射站它发播与真实的GPS卫星相似的信号可在近距离内起到和GP5卫星类同的作用2.13星历ephemeris描述天体的空间位置的轨道参数2.14GPS卫星星历GPS satellite ephemerisGPS卫星星历一共包含16种数据,它们分别是历元、在历元上的6个卫星轨道参数以及用于在历元之后修正轨道参数的9个系数2.15广播星历broadcast ephemeris卫星播发的电文中所包含的本颗卫星的轨道参数或卫星的空间坐标2.16精密星历precise ephemeris由若干个不属于GPS系统的卫星跟踪站获得的测量值,经事后处理计算出的卫星轨道参数供事后精密定位使用2.17历书almanacGPS卫星电文中包含的所有在轨卫星的粗略轨道参数2.18载频L1、L2、L5 carrier L1,L2L5L1、L2为GPS卫星所发射信号的载频,L1为1575.42MHz,L2为1227.60MHzL5为GPS卫星将增发的民用信号的载频,预定为117**5MHz2.19历元epoch指一个时期和一个事件的起始时刻或者表示某个测量系统的auot cad参考日期注:在GPS术语中两种概念都使用2.20伪随机噪声码pseudo random noise(PRN)code一种具有与白噪声类似的自相关特性确定的码序列GPS信号中采用了伪随机噪声编码技术,以产生码分多址(CDMA),直接宇列扩频和伪距测量功能2.21粗/捕获码coarse/acquisition codeC/A码C/A code用于调制GPS卫星L1载频信号的民用伪随机码2.22精码precise codeP码P code曾经用于调制GPS卫星L1和L2载频信号的伪随机码2.23P(Y)码P(Y)codeY码Y codeGPS卫星用于调制L1和L2载频信号的军用伪随机码,由P码与加密码W模2相加而成由于Y码仍然保持着P码的码速率,因此也称作P(Y)码2.24精度因子dilution of precision(DOP)描述卫星的几何位置对误差贡献的因子GPS的误差为测距误差与精度因子之乘积2.25几何精度因子geometrical dilution of precision(GDOP)表征卫星几何位置布局对GPS三维位置误差和时间误差综合影响的精度因子2.26位置精度因子positional dilution of precision(PDOP)表征卫星几何位置布局对GPS三维位置精度影响的精度因子2.27高程精度因子vertical dilution of precision(VDOP)表征卫星几何位置布局对GPS高程定位精度影响的精度因子2.28平面位置精度因子horizontal dilution of precision(HDOP)表征卫星几何位置布局对GPS平面位置精度影响的精度因子2.29时间精度因子time dilution of precision(TDOP)表征卫星几何位置布局对GPS时间精度影响的精度因子2.30捕获acquisition用户设备对接收到的GPS卫星信号完成码识别、码同步和载波相位同步的处理过程2.31重捕re-acquisitionGPS接收机因信号遮挡等原因短时间失锁后重新捕获信号的过程一般很快便能完成2.32跟踪tracking对捕获到的GPS卫星信号继续保持码同步和载波相位同步的过程2.33码相位跟踪code phase trackingGPS接收机通过对GPS卫星信号的C/A码或P(Y)码的码相位进行跟踪,以获得GPS伪距测量值的过程2.34载波相位跟踪carrier phase trackingGPS接收机通过对GPS卫星信号的载波相位的跟踪,以获得载波相位测量值的过程2.35载波相位平滑carrier phase smoothing在GPS接收机中利用积分载波相位测量值,以减小由码相位跟踪噪声造成的误差的方法2.36周跳cycle slips在GPS接收机进行载波相位跟踪时,因某种原因产生的整数载波周期跳变2.37伪距pseudorange由GPS接收机测出的卫星信号传播时间而计算出的卫星与接收天线相位中心间的距离2.38距离变化率range rate用测量GPS卫星载波的多普勒频移求得的伪距变化的速率2.39选择可用性selective availability(SA)是美国人为地将误差引入卫星时钟和星历数据中,以降低GPS标准定位服务(SPS)精度的人为措施注:该措施从1990年3月开始实施,2001年5月1日停止使用2.40完好性integrity当无线电导航系统不应当用于导航时向用户及时发出警告(信息)的能力GPS 系统有一定的完好性措施,但对一些应用系统目前的完好性还不够2.41反欺骗anti-spoofing(A-S)GPS卫星信号中用加密码W与P码相叠加使之变为Y码的措施,用于精密定位眼务(PPS)只有具有解密能力的接收机才能利用精密定位服务2.42标准定位服务standard positioning service(SPS)由GPS的C/A码所提供的公开的民用服务2.43精密定位服务precise positioning service(PPS)由GPS的P(y)码所提供的保密服务,仅供美国及其盟国军用或经特许的其他用户使用2.44接收机自主完好性监测receiver autonomous integrity monitoring(RAIM)接收机利用冗余GPS卫星的伪距测量信息以判定GPS系统完好性的方法它能判断可见卫星中是否有卫星出现故障或哪一颗卫星发生了故障并将其排除在导航解之外2.45飞机自主完好性监视airplane autonomous integrity monitoring(AAIM)利用飞企业资产负债表表格下载机上各种导航设备的冗余信息辅助GPS接收机,以提高GPS完好性的一种技术2.46GPS完好性通道GPS integrity channel(GIC)以由多个地面GPS卫星监测台组成的网为基础,提高GPS星座完好性的技术2.47故障检测和排除fault detection exclusion(FDE)在RAIM中,利用冗余GPS卫星的伪距测量信息,具体地判定某一颗卫星不可用而将其从求解组合中排除不用的方法注:当可见卫星为6颗以上时才能作故障检测和排除2.48GPS监测站GPS monitor station在GPS地面控制段中用以对GPS星座的所有卫星进行跟踪测量的设施全球一共设有5个所有监测站收集到的数据传送到主控站,在那里解算出卫星星历和时间的修正参数,然后上行加载到卫星上2.49主机板original equipment manufacture(OEM);engine board是GPS接收机的核心部件包括RF、数字通道、处理器和定位解算软件在OEM基础上,根据不同用户的需求,加上不同的人机界面、天线和外壳结构,可以做成适合不同需要的GPS用户没备2.50C/A码GPS接收机C/A code GPS receiver利用GPS的C/A码进行导航定位的接收机2.51P(Y)码GPS接收机P(Y)code GPS receiver利用GPS的P(Y)码进行导航定位的接收机2.52单频GPS接收机single frequency GPS receiver只能接收GPSL1载频信号而进行导航定位的接收机2.53双频GPS接收机dual frequency GPS receiver能够接收GPS L1、L2信号而进行导航定位的接收机2.54无码GPS接收机codeless GPS receiver在不知道P(Y)码序列的条件下,采用某种信号处理技术获得GPSL1和L2双频信号的测量值,从而具有电离层延迟校正能力的民用双频GPS接收机2.55软件无线电GPS接收机software radio GPS receiver将经天线接收和直接放大后的GPS卫星信号送入高速模/数变换器,其后的全部处理过程由通用数字信号处理器完成的GPS接收机2.56导航型GPS接收机navigational GPS receiver能在动态条件下提供实时定位及其他数据并具有导航功能的GPS接收机2.57测地型GPS接收机geodetic GPS receiver能够提供卫星信号原始观测值用于高精度测量的接收机2.58GPS/GLONASS兼用接收机GPS/GLONASS dual-used receiver能够同时接收GPS卫星和GLONASS卫星信号进行导航定位的接收机2.59测姿型GPS接收机attitude-determination GPS receiver用以测量载体方向、横滚和俯仰等参数的GPS接收机通常由多个GPS接收天线、OEM和相应的处理器组成2.60测向型GPS接收机GPS azimuth-determination receiver用以测量载体方向等参数的GPS接收机,通常由双天线、OEM和相应的处理器组成2.61授时型GPS接收机time transfer GPS receiver专用于精确时间(GPS时或UTC时间)发布的GPS接收机有时还同时输出高稳定度的频率授时精度可以达到或超过40ns2.62定时校频GPS接收机GPS time/frequency receiver同时产生GPS标准秒信号和基准频率的GPS接收机用于对用户的时钟和频率源进行定时和校准2.63单通道GPS接收机single channel GPS receiver采用单个硬件通道,按照一定的时序实现对多颗卫星信号的跟踪并完成定位功能的老式GPS接收机2.64多通道GPS接收机multichannel GPS receiver一个包含多个并行通道的GPS接收机每个通道都能独立连续跟踪一颗或一颗以上卫星2.65GPS数字接收机GPS digital receiver从中频开始进行数字量化处理的GPS接收机2.66GPS模拟接收机GPS analog receiver载波环和码环采用模拟电路实现的老式GPS接收机2.67差分GPS接收机differential GPS receiver能够接收由差分基准站的数据链路发射的差分修正数据,而进行差分导航定位的GPS用户设备,一般包括数据链信号接收机和能利用差修正信息的GPS接收机2.68GPS接收机应用模块GPS receiver application module(GRAM)是一种标准化的美国军用GPS用户设备模块,用于确保军用GPS用户设备的安全性、共用性和互换性2.69GPS天线设备档案表格相位中心GPS antenna phase center指GPS天线的电气中心其理论设计应与天线的几何中心一致2.70GPS接收机噪声GPS receiver noiseGPS接收机噪声是由接收机内部热噪声、通道间的偏差和量比误差等引起的测距和测相误差的综合表征2.71GPS微带天线GPS microstrip antenna一种GPS接收机天线类型由粘接在基板上的特殊设计和精确量裁的金属箔构成2.72冷启动cold startGPS接收机在不知道星历、历书、时间和位置的情况下开机,需要较长时间才能正常定位2.73温启动warm startGPS接收机在不知道星历,但存有历书、时间和位置的情况下开机,达到正常定位的时间比冷启动短2.74热启动hot startGPS接收机在存有星历、历书、时间和位置的情况下开机达到正常定位的时间比温启动短2.75均方根误差root mean square(RMS)表明GPS观测值数据质量的参数,其值越小数据质量越好2.76用户距离误差user range error(URE)用户测量所得的伪距与至卫星真实距离的误差,用均方根值来规定2.77用户等效距离误差user equivalent range error(UERE)根据各种误差源听求得的对用户至卫星距离测量误差的估值2.78GPS导航电文GPS navigation message是由GPS卫星播发给用户的描述卫星运行状态与参数的电文,包括卫星健康状况、星历、历书,卫星时钟的修正值、电离层时延模型参数等内容,以50bps 速率播发2.79转换字hand over word(HOW)GPS导航电文中的转换字载有时间信息,用于在P(Y)码接收机中辅助从C/A 码跟踪状态转换到P(Y)码跟踪状态2.80Z-计数Z-countGPS卫星时钟时间在GPS导航电文中位于每个子帧的第二个转换字(HOW)之前,用29位二进制数表示,单位为1.5s,一个Z-计数为6s2.81差分GPS differential GPS(DGPS)一种提高GPS定位和定时精度的技术在已知点上设置GPS基准接收机,根据由此获得的GPS测量误差产生误差修正量,实时或事后提供给差分GPS用户设备,使用户设备接收并利用修正量以提高其定位精度2.82差分基准站differential reference station差分站differential station设在已知坐标点上的GPS基准接收机连续观测视界内的卫星,产生差分修正量再利用数据链发射台向差分GPS用户设备发送差分修正信息这种固定站称为差分基准站2.83局域差分GPS local area DGPS(LADGPS)用于提高局部区域的GPS定位精度的实时差分GPS系统2.84局域增强系统local area augmentation system(LAAS)利用VHF数据链的局域差分GPS系统,它同时提高GPS定位精度和完好性为飞机精密进近服务2.85位置差分GPS position differential GPS以差分基准接收机提供的位置误差作为修正量的局域差分GPS,它要求基准站GPS接收机和用户接收机使用相同的卫星组进行定位解算2.86伪距差分GPS pseudorange differential GPS以差分基准接收机产生的视界内各颗GPS卫星的伪距误差及其变化率作为修正量的局域差分GPS它不要求基准接收机和用户接收机使用相同的星组2.87载波相位差分GPS carrier phase differential GPS利用基站GPS接收机和用户GPS接收机对多颗卫星信号的载波相位和码伪距的观测量,进行双差分和其他处理,以使用户获得厘米甚至毫米级定位精度的一种相对定位技术2.88实时动态测量系统real time kinematic(RIK)survey system利用数据链将基站GPS接收机的载波相位和码伪距观测量传送给用户,用户接收机采用双差分以及其他处理快速解算出载波整周多值性,以实现动态高精度的实时定位系统2.89EUROFIX系统EUROFIX system以罗兰C作为数据链的局域差分GPS系统2.90连续工作基准站continuously operating reference stations(CORS)互联网差分iso9001质量手册范本GPS internet differential GPS由美国大地测绘局(NGS)、国家海洋和大气局(NOAA)联合建立的GPS增强系统它通过互联网和电话数据包服务,收集来自分布在全国的几百个基准站的码距离和载波相位数据,经中心站处理后再通过互联网,提供给用户,支持GPS 非导航用户和后处理应用,提高GPS定位精度2.91中波数据链差分differential using medium frequency data link利用中波数据链的局域差分GPS2.92海用差分GPS maritime DGPS是一种中波数据链差分GPS用已有的或增强的海用无线电信标台发射信号的副载波作数据链,同时提高水上用户的定位精度和完好性2.93调频数据链差分differential using FM data link利用调频广播副载波作数据链的局域差分GPS2.94全国差分GPS nationwide differential GPS(NDGPS)利用与海用差分GPS同样的体系结构由许多基准站组成,并连同已有的海用差分站,组成覆盖全美国的系统,用于提高GPS定位精度与完好性,为陆上和水上用户服务2.95广域差分GPS wide area DGPS(WADGPS)利用大范围地面分布的GPS基准站收集GPS卫星的数据把伪距误差分解成分量,在整个区域对每一分量进行估计形成修正量,将这些修正量实时传送给GPS用户设备一般由主控站、多个基准站、差分信号播发站、数据通信网络和用户设备组成可用相对较少的基准站提高较广区域的GPS定位精度2.96广域增强系统wide area augmentation system(WAAS)由美国研制的,利用广域差分技术、卫星完好性监测技术和GPS导航信号转发技术,用地球静止卫星作为数据链以GPS L1载频播发这些增强信息用户使用相宜的接收机系统WASS提高GPS的完好性、精度和可用性主要为美国民用航空服务目标是使GPS在整个美国达到飞机I类精密进近的水平2.97欧洲静地星导航重叠服务European geostationary navigation overlay service (EGNOS)欧洲发展的与WAAS相类似的系统和WAAS的主要差别是:它将同时增强GPS和GLONASS系统,覆盖整个欧洲及周边地区2.98多功能交通卫星星基增强系统MTSAT satellite based augmentation system (MSAS)由日本发展的,与WAAS十分类似的系统利用多功能交通卫星(MSAST)播发数据,覆盖日本及其周边洋区2.99星基增强系统satellite based augmentation system(SBAS)利用地球静止轨道卫星播发差分修正及其他信息,以提高卫星导航用户的精度及其性能的广域增强系统2.100陆基增强系统ground based augmentation system(GBAS)利用地面发射台播发差分修正及其他信息以提高卫星导航刚户精度机其他性能的局域增强系统2.101机上增强系统aircraft based augmentation system(ABAS)航空器上利用其他系统获得信息以增强卫星导航用户终端的(定位)性能,或利用它们之间的组合方式共同形成性能增强的导航信息2.102联合精密进近着陆系统joint precision approach and landing system(JPALS)是美国军方正在研制的利用军用信号的差分GPS着陆、着舰系统2.103舰载相对GPS shipboard relative GPS是联合精密进近着陆系统作舰载飞机着舰时的特殊应用方式,为飞机提供相对于军舰的位置2.104GPS现代化GPS modernization为提高GPS系统性能而正在抉行的计划,包括在GPS卫星发射的L2载频上增加调制民用码,增加发射L5载频的民用信号,把军用与民用信号频谱分隔开,在L1、L2上增发军用的M码、增大卫星发射功率和改善地面控制段等措施2.105广域GPS强化wide area GPS enhancements(WAGE)利用GPS卫星同时发播整个星座的伪距修正信息,以提高GPS系统精度的一种方法2.106GPS精度改善创新GPS accuracy improvement initiative(AⅡ)是美国为提高GPS系统精度而正在进行的一项计划,该计划包6s管理检查表括把美国影像和地图绘制局(NIMA)的GPS卫星监测站并入现有监视网络,重新设计主控站GPS中的卡尔曼滤波器以及改善对GPS卫星上行注入方式与能力等三项改善地面控制段的措施2.1073P计划3P program是美国对GPS导航战计划的别称,包括:● 保护(美国及其盟国)在战场上的GPS军事服务;● 防止敌对方对GPS服务的利用;● 维持在战场区域以外的GPS民用服务注:由于保护(protection)、防止(prevention)、维持(preserve)的英文字头均为P,故称为3P2.108导航战navigation warfare(NAVWAR)美国于1996年开始执行的一项军事计划,其目的是提高GPS军用接收机的抗干扰能力,使美军具有在区域的基础上停止GPS民用接收机工作的能力,甚至包括停止其他卫星系统工作的能力2.109GPS接口控制文件GPSICD-200GPS接口控制文件是—个美国政府文件,包括用户与GPS卫星间接口的完整的技术说明2.110海用差分GPS电文格式RTCM SC-104 DGPS message format美国海用无线电技术委员会(RTCM)104专门委员会(SC-104)制定的GPS 差分数据电文格式,在世界范围得到推广应用2.111NMEA-0183美国国家海洋电子协会制定的海用电子设备接口标准及数据格式,许多GPS接收机采用这种标准作为一种数据输入输出格式3 测量特性术语3.11984世界大地坐标系world geodetic system 84WG84坐标系WG84 coordinate system由美国国防部在与WGS72相应的精密星历系统NSWC-9Z-2基础上采用1980大地参考系和BIH1984.0系统定向所建立的一种地心参考系3.2模糊度(多值性)ambiguity当一个接收机对卫星进行连续观测,为重建载波相位的伪距观测值,其中所包含的侍解未知整周数称为整周模糊度值3.3天线高antenna height观测时接收机天线相位中心至测站中心标志面的高度3.4观测时段observation session观测站上开始接收卫星信号到停止接收,连续观测的时间间隔称为观测时段简称时段3.5同步观测simulateous observation两台或两台以上接收机同时对同一卫星进行的观测3.6独立观测环independent observation loop由非同步观测获得的基线向量构成的闭合环3.7单差解single difference solution对两个不同观测站GPS接收机同步观测同一卫星载波相位观测值进行求差的数据处理方法可以消除或削弱GPS卫星钟差、轨道误差、电离层时延和对流层时延3.8双差解double difference solution对两个不同观测站GPS接收机同步观测两颗卫星听得的单差进行求差的数据处理方法,可以消除GPS接收机钟差3.9三差解triple difference solution对两个不同观测站GPS接收机同步观测两颗卫星所得的双差在不同历元进行求差的数据处理方法,可以消除整周模糊度3.10数据剔除率percentage of data rejection删除的观测值个数与应获取的观测值个数的比值3.11扼流圈天线choke ring antenna一种根据L1、L2频率值精心设计的带有多路径抑制槽、可以同时消除L1、L2多路径效应的测量型GPS接收机专用天线,一般用于高精度GPS测量3.12RATIO值RATIO反映GPS整周模糊度解算结果可靠性的参数,其结果取决于多种因素用次最小RMS与最小RMS的比值来表示3.13组合观测值combinative observation由L1、L2载波相位观测值通过一定的数学运算得到的观测值3.14宽巷观测值wide lane observation由L1-L2得到的组合观测值,其波长为86.19cm,有利于求解整周模糊度3.15窄巷观测值narrow lane observation由L1+L2得到的组合观测值,具有比L1、L2都小的观测噪声3.16RINEX格式receiver independent exchange format是GPS原始观测数据的一种通用的存储格式,是ASCII码文本文件,一般由观测数据文件、导航数据文件、气象数井下作业工初级工据文件三种,有特定的文件命名方式其最新版已包括GLONASS数据3.17参考站reference station在一定的观测时间内一台或几台接收机分别固定在一个或几个测站上一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就称参考站3.18流动站roxing station在参考站的一定范围内流动作业的接收机所设立的测站3.19GPS静态定位测量static GPS positioning通过在多个测站上进行若干时段同步观测,确定测站之间相对位置的GPS定位测量3.20GPS快速静态定位测量fast static GPS positioning利用快速整周模糊度解算法原理所进行的GPS静态定位测量3.21永久性跟踪站permanent tracking station长期连续跟踪接收卫星信号的永久性地面观测站3.22单基线解single baseline solution在多台GPS接收机同步观测中每次选取两台接收机的GPS观测数据解算相应的基线向量3.23多基线解multi-baseline solution从m(m>3)台GPS接收机同步观测值中,由m-1条独立基线构成观测方程统一解算m-1条基线向量3.24航摄GPS测量参考点reference point for GPS photographic surveying航摄GPS测量中计算动态基线的起算点3.25偏心向量eccentric vector飞机上GPS天线相位中心对航摄仪镜头中心的偏移向量3.26初始基线initialization baseline航摄GPS测量开始之前,参考点和飞机上GPS天线相位中心之间的距离3.27闭合基线closure baseline航摄GPS测量结束后,参考点和飞机上GPS天线之间的距离3.28运动测量kinematic surveying只需短时间的观测资料的连续差分载波相位测量的一种方式操作常数包括确定一已知基线或从一已知基点开始最少跟踪四颗卫星—个接收机应固定安装在一控制点上(已知点上)其他接收机在被测点间移动3.29单点定位point positioning一台接收机单独模式下的地理定位3.30绝对定位absolute positioning定位方式之一,定出某点在某一个特定坐标系上的位置,该坐标系通常是地心坐标系3.31相对定位relative positioning指通过两个站的接收讥同时司步地观测相同卫星来确定两个站的相对位置差的过程这种技术可以消掉两个站的共同误差,比如卫星钟差和预报星历误差,传播延迟等3.32静态定位static positioning一种接收机处在静止或几乎静止情况下的定位3.33动态定位dynamic positioning按时间顺序求解运动中的接收机的坐标每一组坐标只由一次信号取样来确定,且通常进行实时解算4 导航特性术语4.1汽车GPS导航系统in-vehicle GPS navigation system汽车GPS导航系统是以车载GPS接收机为基础,结合其他导航手段获得载体位置数据,并与导航地图数据库相匹配。
基于北斗的SBAS保护级算法研究
基于北斗的SBAS保护级算法研究于耕;李大武;陈志强【摘要】随着国际导航事业的迅猛发展,中国基于北斗的星基增强系统(BD-SBAS)的研究也迫在眉睫,其中完好性性能指标一直是实际应用中关注的重点,它是衡量卫星导航系统性能可靠性的重要标志.而完好性的两个主要指标:水平保护级(HPL)和垂直保护级(VPL)的算法也成为研究的重点.利用大地参考基站的数据并按照一定的算法可计算出HPL与VPL的值.研究表明,计算出的水平与垂直保护级结果符合高精度导航进近的要求,从侧面证明了在中国北斗基础上搭建的星基增强系统同样可以被实际运用,而且精度很高,达到三类进近要求.【期刊名称】《沈阳航空航天大学学报》【年(卷),期】2018(035)003【总页数】6页(P66-71)【关键词】北斗导航星基增强系统;完好性;保护级;算法【作者】于耕;李大武;陈志强【作者单位】沈阳航空航天大学民用航空学院,沈阳110136;沈阳航空航天大学电子信息工程学院,沈阳110136;中国国际货运航空有限公司飞行技术部,北京100621【正文语种】中文【中图分类】V249.32+9完好性指的是卫星导航系统由于自身或外界的影响停止导航服务亦或保护级异常发出告警信号的情况下,系统能够自我检测与报警的能力。
它是衡量导航系统优劣的重要指标,对于用户的生命财产安全有着重大影响。
当前运用广泛且成熟的完好性算法主要有接收机自主完好性监测(Receiver Autonomous Integrity Montior,RAIM)及地面完好性通道(Ground Integrity Channel,GIC),前者属于用户终端的性能要求,后者属于系统顶层设计的范畴[1]。
完好性的好坏主要由报警阈值、告警时间以及完好概率等指标来反应,而无论采用何种完好性算法,针对不同星座数目计算出的结果都会不尽相同[2-3]。
完好性相关参数的计算是当前完好性研究的热点。
某种程度上,导航系统的完好性水平是用户最为关注的指标。
测绘工程毕业论文选题汇编(武大)
GPS 基于漏检概率的 RAIM(接收机 自主完好性监测)可用性分析方法 RAIM(接收机自主完好性监测)可用 性判断方法研究 卫星导航系统可用性和连续性的分 析 GPS 接收机的完好性自检测和故障分 离技术
测绘工程 测绘工程 测绘工程 测绘工程
吴 云 GPS 系统中模型误差的可区分性研究 测绘工程
卫星应用 114 工程
卫星应用 115 工程
卫星应用 116 工程
卫星应用 117 工程
卫星应用 118 工程
卫星应用 119 工程
卫星应用 120 工程
卫星应用 121 工程
卫星应用 122 工程
卫星应用 123 工程
卫星应用 124 工程
卫星应用 125 工程
基于三维空间的二维平面平差模型 姚宜斌 研究
测绘工程
王甫红 王甫红 王甫红
地球物理/测
海洋地磁场模型的建立方法初探
绘工程
超高建筑智能全站仪测量的精度分
析
测绘工程
建筑沉降监测分析系统研究
测绘工程
大坝监测资料的动态响应分析
测绘工程
远程 GPS 动态几何监测系统的可视化
研究
测绘工程
桥梁健康监测技术研究
测绘工程
轨道交通安全检测技术研究
测绘工程
不同小波函数在变形监测数据中信
噪分离效果的比较与分析
测量工程
地球物理/测
15
赵建虎 海洋地磁日变效应影响的消除
绘工程
具备地磁测量的知识和理论
16 测量工程 赵建虎 海底分类方法的综合分析
测绘工程
具备图像处理和测量工程相关知识
测量工程 17
测量工程 18
测量工程 19 20 测量工程 21 测量工程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第36卷第3期2011年3月武汉大学学报 信息科学版Geo matics and Info rmat ion Science of W uhan U niver sity V ol.36N o.3M ar ch 2011收稿日期:2011 01 08。
文章编号:1671 8860(2011)03 0271 05文献标志码:A载波相位差分接收机自主完好性监测研究孟领坡1 吴 杰1 袁义双2(1 国防科技大学航天与材料工程学院,长沙市德雅路,410073)(2 95172部队,长沙市,410115)摘 要:首先提出了浮点变换完全去相关法,该方法能够在单历元动态确定整周模糊度。
研究了基于载波相位测量的完好性监测方法。
利用最小二乘残差构造统计检验量,对整周模糊度进行检测。
分析了定位误差保护限与卫星构型、漏警概率的关系。
实测数据表明,整周模糊度在单历元动态求解的成功率为100%,增加1颗卫星将使垂直定位误差保护限减少约0.2m,统计检验量检测周跳的正确率为100%。
关键词:卫星导航;接收机自主完好性监测;检测门限;整周模糊度;周跳中图法分类号:P228.41目前,接收机自主完好性监测(receiver au tonom ous integ rity m onitor ing,RAIM)算法主要有距离比较法、奇偶矢量校验法和最小二乘残差法3种。
这3种方法在数学上是等效的[1]。
由于不能实时可靠地确定整周模糊度,目前国内的RAIM 技术研究都采用伪距为基本观测量[1 3]。
为了增强导航系统的可用性,减少对观测卫星数目的依赖,最近的RAIM 研究引入外部测量信息,如SINS [4]、气压高度表[5,6]等。
基于伪距观测量的导航和完好性监测,因其观测噪声较大、定位精度不高,只能满足航路飞行和非精密进近应用。
基于载波相位观测量的实时导航技术,能够满足精密进近着陆的精度要求,其关键就是整周模糊度的实时可靠求解。
在短基线(小于20km)条件下,两测站的大气延迟相关性较强,观测量的双差能消除大部分测量误差[7]。
此时,波长的大小对正确求解整周模糊度至关重要,波长越长,正确求解越容易[8]。
本文首先提出了一种单历元在航确定整周模糊度的浮点变换完全去相关法。
该方法采用宽巷组合载波相位双差、伪距双差观测量,求解浮点模糊度,由于宽巷组合载波波长较长,因而减少了伪距双差测量误差对浮点模糊度精度的影响;对浮点模糊度方差 协方差阵进行一次Cholesky 分解,得到浮点转换矩阵,使浮点模糊度完全去相关,从而减少模糊度整周搜索范围;以最小二乘残差平方和最小为标准,确定单历元整周模糊度;用多历元一致性检验方法,对不同历元得到的整周模糊度解进行检验,提高了其可靠性。
针对定位结果完好性监测问题,本文提出了基于载波相位双差残差平方和的RAIM 算法。
检测门限由误警概率、可见卫星颗数确定。
本文还研究了由漏警概率、卫星几何分布构型和载波测量均方差确定保护限的方法,由最小二乘残差平方和检测、保护限检测综合构成完好性监测。
因为载波相位测量精度高,所以残差平方和检测的门限可以设得很小,大大降低了完好性监测的误警率和漏警率。
1 高精度定位模型建立基站北天东坐标系,坐标原点为基站观测天线几何中心o;x 轴为过o 点的子午面与水平面的交线,指向北方向;y 轴垂直于过o 点的水平面指向上方;o x y z 构成右手直角坐标系。
基站、动态站同时跟踪两颗GPS 卫星k 、j ,以j 号卫星为参考星,测量载波L 1、L 2,采用双频宽巷组合 = L 1- L 2形式,可得双频载波宽巷组合线性化双差观测方程:y =1r j 02-r k 02d X +N jk 12 + jk12(1)武汉大学学报 信息科学版2011年3月式中,y 为双频宽巷组合双差与方程零次项之差;r k 02、r j 02为动态站到卫星k 、j 的单位矢量;d X为动态站坐标修正量;N jk 12 为宽巷组合整周模糊度; 为宽巷组合波长; jk 12 为宽巷组合载波相位测量噪声。
类似于载波相位双差线性化观测方程(1),伪距双差观测方程的线性化形式为:=r j 02-r k 02d X + jk12(2)式中, 为伪距双差观测值与零次项的差; jk12为伪距双差观测噪声。
2 浮点变换完全去相关法设在t 1时刻两测站同时观测n 颗卫星。
取仰角最大的卫星为参考星,得到n -1个载波、伪距双差观测方程。
用最小二乘法解联合方程组,得t 1时刻模糊度浮点解矢量N F =N1F N 2F N (n -1)F T和相应的协方差阵 F 。
F 对称正定,对 F 作Cho lesky 分解,得到浮点下三角矩阵L ,使得L-1F (L T )-1=I (n -1) (n -1)成立。
对N F 作变换N F =L -1N F 。
设宽巷组合整周模糊度矢量真值为N =[N1N 2N(n -1)]T,对其作变换:N =L -1 N(3)设各观测量是服从独立正态分布的随机变量,则N F 服从以N 为期望,以单位阵I (n -1) (n -1)为方差阵的正态分布。
因此,对于变换后的模糊度各个分量,式(4)有99.7%的概率成立:-3 N i F -N i 3(4)其中,i =1, ,(n -1)。
联立式(3)、(4),可得整周模糊度的取值范围:-3+l i 1(N 1F -N 1)+ +l ii-1(Ni-1F-Ni-1)l ii +N i F N i3+l i 1(N 1F -N 1)+ +l ii-1(N i-1F -N i-1)l ii+N i F(5)在式(5)每个不等式所确定的实数范围内取整数,这些整数组合构成了t 1时刻整周模糊搜索空间。
将一组模糊度整数组合代入n -1个式(1)组成的宽巷组合载波相位双差观测方程组,利用最小二乘法,求得t 1时刻的宽巷组合载波相位双差残差平方和,使残差平方和达到最小的整数组合即是t 1时刻的整周模糊度搜索解,记作N *1。
对m 个历元的观测数据进行单历元整周模糊度搜索求解,得到整周模糊度矢量序列N *i,i =1,2, ,m 。
采用OVT 检验方法,对此序列进行一致性检验。
若连续m 个历元的整周模糊度搜索解相同,则认为得到了正确的整周模糊度;否则重新搜索。
3 完好性监测3.1 最小二乘残差监测利用上述方法得到载波相位整周模糊度后,载波相位双差观测方程组可以写成矩阵形式:Z =H d X + (6)式中,Z 是n -1维的观测量与计算量、整周模糊度的差矢量;H 是n -1 3的观测矩阵,由动态站到卫星的方向余弦构成; 为宽巷载波相位双差观测噪声。
式(6)的最小二乘解为:d X ^=H TH-1H TZ =AZ(7)双差载波相位残差向量为:r =Z -H d X ^=I -H H T H-1H T =S(8)其平方和为SSE=r Tr = TS ,验后单位权中误差为^ =SSE /(n -4)。
^包含了双差载波相位观测误差信息,可以用作最小二乘残差检测统计检验量。
设载波相位测量误差向量 中的各分量服从相互独立的正态分布,均值为0,方差为 2,依据统计分布理论,统计量SSE / 2服从自由度为(n -4)的 2分布。
在无载波相位测量偏差时,系统应处于正常状态,如果出现监测告警,则为误警。
给定误警概率P FA ,有下面的概率等式成立:Pr SSE / 2 <T =Tf2n -4x d x =1-P FA(9)其中,f 2n -4x 为 2分布的密度函数。
通过式(9)确定了SSE / 2的监测限值T ,则^的监测门限为 T =2T /(n -4)。
导航解算时,实时计算^ ,与 T 比较,若^ > T ,则表示监测到测量偏差,向用户发出告警。
3.2 误差保护限监测RAIM 技术要求有足够的观测卫星个数(n 5)。
即使所有的GPS 卫星都正常工作,仍然有很多地区的卫星构型不够理想。
较差的卫星构型可能会产生较好的定位解,但此时的卫星构型不能保证统计检验量^ 可靠地监测出测量偏差,导致故障漏检。
在最小二乘残差监测前,首先要在完好性监测漏警概率要求下,计算水平保护限H PL 或垂直保护限VPL,以判断当时卫星构型是否满足故272第36卷第3期孟领坡等:载波相位差分接收机自主完好性监测研究障监测的最大漏检需要。
当存在载波相位测量偏差时,检验量SSE/ 2 服从非中心化的 2分布。
给定漏检概率P MD,检验量应满足如下概率等式[9]:P r SSE/ 2 <T= T0f 2n-4, x d x=P MD 式中,f 2n-4, x为非中心化的 2分布密度函数。
由上式可求得非中心化参数 。
假设第i颗星载波相位存在偏差b,忽略其余观测噪声影响,非中心化参数可表达为:=E(SSE)/ 2 =E(r T r)/ 2 =S ii b2/ 2上式右边分子分母同乘以A21i+A23i,A1i、A3i 分别表示式(7)A矩阵中第1行第i列和第3行第i列,则 =(A21i+A23i)S ii b2/ 2 (A21i+A23i)。
令H PL i=A21i+A23i b,即H PL i= (A21i+A23i)/S ii ,H PL i表示由偏差b产生的水平面定位误差估计。
计算所有卫星的H PL i,其最大值对应于水平保护限值H PL=maxi (H PL i)。
同理,可以得到垂直保护限值VPL= maxiV PL i,其中VPL i=A22i/S ii ,A2i表示A矩阵中第2行第i列。
由非中心 2分布密度函数图形可知,在给定检测限值 T的条件下,若漏检概率P MD越小,则 越大,也即VPL越大。
当垂直方向实际定位误差大于VPL时, 2检验将给出报警信号(^ > T),漏警概率小于事先设定的P MD。
依据飞机着陆导航的需求,事先给定垂直告警限值VAL。
在导航过程中实时计算VPL,若VPL>VAL,则给出报警,表示此时的精密差分导航系统不可用。
当VPL>VAL时,若垂直方向实际定位误差大于VAL,则 2检验的漏警概率可能大于事先设定的P MD。
4 实验与分析为了验证本文方法的有效性,于2009年3月10日进行了静态、动态GPS相对定位实验,基站选在实验楼顶,动态站在距基站约6km的运动场,采用2台Nov atel公司生产的GPS DL 4接收机,采样率为1H z。
实验时,首先将动态站放在三脚架上,静态测量25m in,然后将动态站放到汽车顶部,汽车沿运动场跑道跑两圈,再将动态站放到三脚架上,测量约2min。
采集2040个历元数据。
4.1 整周模糊度确定用Novatel公司商用软件GrafN av7.60进行计算,得到静态条件下动态站坐标平均值为[3523.273m,-18.929m,4862.195m]T(基准站北天东坐标系),视为动态站静态坐标真值。