GPS接收机射频前端电路原理与设计
射频接收机前端及其关键模块设计

参数 和 结构 ,并 分析 了低噪 声放 大 器和 混频 器等 射 频接 收机 前 端 的 两个 关键 模 块 ,从 而帮助 设 计 套 射 频接 收机 前 端 系统 ,确保
一
整 个 接 收 机 的 性 能 和 接 收 信 号 的 质 量。
收器 的第一 级 ,当射频信号进入 到接 收机时往 往先要通 过低噪声放大器模块 。它 的噪声、线 益 ,要仔细选择跨 阻放大器上 的反馈 电容 和反 性度 以及增 益等对整个接受机 的性能都具有 一 馈 电阻的数值。一般这类射频器 的热 噪声主要 定 的影响。所 以对 低噪声放大器设计 时 , 要 使 来 源于输入跨导管 、开关管的 的沟道 热噪声 以
中 简 要 介 绍 了射 频 接 收 机 的 主 要
重要特征和整个接 收机 系统的性能 ,因此要对 混频器 和电压模 式的混频器 。电流模 式的无源 射频接收机前端 的核心部 件进 行设计 ,它主要 混频器控 制交流电流流过的开关 ,同时开 关两 包括 低噪声放大器和混频器两大 关键模块 。 端不会 出现 较大 的信号 电压幅度 ,跨导级是它 的第一级 , 将输入的 电压信号转换为 电流信号 , 2 . 1低 噪 声 放 大 器 ( L N A) 然后 电流信号进入开 关级 ,由开关级开关调制
Байду номын сангаас
其具备尽 可能低的功耗 、足够大 的增益 、尽 可 及 跨 阻放 大 器 的 热 噪声 。 电压 模 式 的无源 混频 器 具有 较 好 的线性 能克服 混频器 的噪声干扰 、特定 的输入 阻抗 和
接收机中的射频前端设计

接收机中的射频前端设计接收机中的射频前端设计摘要本文首先简要说明了射频前端在接收机中的重要性,之后详述了射频前端可能采用的几种结构,并分析了影响其性能的各种因素。
关键词射频前端混频器乱真响应互调截获点一、前言现代民用及军用设施使用电子设备繁多,电磁环境复杂,相互干扰严重。
一般地,车、船和飞机上的通信设备收发机都集成在一起。
以短波通信设备为例,发射机的残余信号在接收机输入端产生的电平达120dBμV(即13dBm)或更高。
而接收机所需接收的微弱信号电平可能仅-6~0dBμV(即-117~-113dBm)。
因此,要求接收机处理的信号动态范围高达120~126dB。
另外,高电平干扰信号与所接收信号频率仅相距数十千赫,所以,高电平干扰信号和它们在接收机中产生的互调产物会严重影响接收机的输出信噪比。
为了降低这种影响,就要求接收机具有以下性质:·高选择性,接收机的动态范围尽可能要大;·高线性,在信道滤波之前,降低带外高电平干扰信号在信道滤波器通带内产生的互调产物;·极低的本振相位噪声,以免邻近的干扰信号将本振噪声转换到接收机信道带宽内。
作为接收机重要组成部分的接收机射频前端是接收机动态性能的关键部件,它工作于中频放大器之前。
诸如动态范围、互调失真、-1dB压缩点和三阶互调截获点等,都与接收机前端的性能有直接关系。
本文以下将介绍接收机中的射频前端设计技术。
二、射频前端的几种结构1、最简单的射频前端结构接收机前端电路有几种不同的结构。
图1示出了一种最简单的形式。
这种结构无射频放大器,在带通滤波器之后,只有混频器和本机振荡器。
带通滤波器的输入来自天线,其输出经过混频器到达中频放大器进行后续处理。
这种结构的主要特点是:第一,在实现中所需成本比其它结构少;第二,避免由于处理无用的能量而消耗混频器的动态范围。
带通滤波器具有良好的前向性能(在通频带范围内)和良好的反向隔离性能。
这样可以防止本振信号能量辐射到天线,进而避免天线辐射这些信号能量。
基于GP2015射频前端电路的GPS接收机设计
【文献标识码 】A
【文章编号 】1008—1151(2007)12—0028—03
(一 )引言 GPS(全球定位系统)以全天候、高精度、 自动化 、高效率
等 显著特点及其所独具的定位 导航、授时校频 、精密测量等多 方面的强大功能 ,使其用途越来越广泛 。GPS卫星发送 的导航 定位信 号是一种可供无数用户共享 的信 息资源。对于陆地 、海 洋和空 间的广大用户,只要用户拥有 能够接 收、跟 踪、变换和 测量 GPS信号的接收 设备 即 GPS信号接收机 ,就可 以在任何时 候用 GPS信号进行 导航 定位测量 。
【摘 要 】概述 了 GPS接收机基本工作原理 ,提 出了一种基于 GP2015射频前端 电路 的 GPS接 收机 方案。详细说 明 GP2015
射 频放 大器的设计原理 以及外 围匹配电路设计方法。重点叙述 了接 收机软硬件设计思路和方法。
【关键词 】GPS;前置放大;变频 ;相 关器;
【中图分类-g-]P228.4
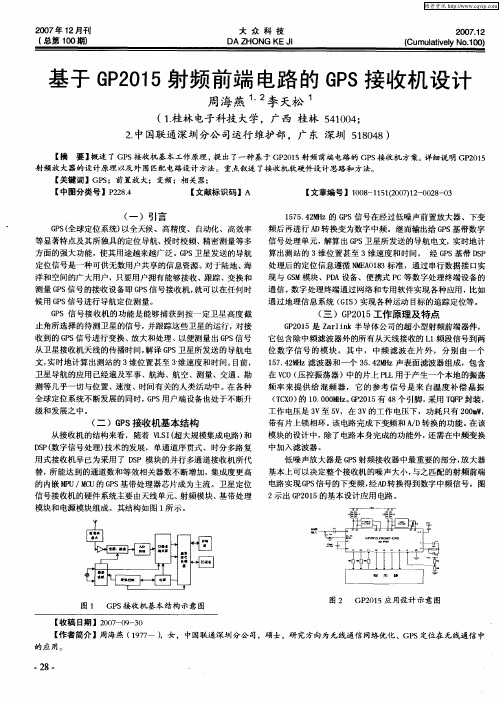
低噪声放 大器 是 GPS射频接收器 中最重要的部分,放大器 基本上可 以决定整个接收机 的噪 声大 小,与之匹配 的射频前端 电路 实现 GPS信 号的下变频 ,经 AD转换得到数字 中频信号 。图 2示 出 GP2015的基本设计应用 电路 。
图 1 GPS接 收 机 基 本 结构 示 意 图
GPS信 号接 收机的功能 是能够 捕获到按一 定卫星 高度截 止角所选择 的待测卫星的信 号,并跟踪这 些卫星的运行 ,对接 收到 的 GPS信号进行变换 、放大和处理、以便测量 出 GPS信号 从卫星接收机天线的传播时间,解译 GPS卫星所发送 的导航 电 文 ,实时地计 算出测站 的 3维位置甚至 3’维速度和时 间。目前, 卫星导航 的应用 已经遍及 军事 、航海 、航空 、测量、交通 、勘 测等几乎一切与位置、速度 、时间有关的人类活 动中。在各种 全球定位系统不断发展的同时,GPS用户端 设备也处于不 断升 级和发展之 中。
GPS接收机射频前端电路原理与设计

GPS接收机射频前端电路原理与设计
何宇云
【期刊名称】《电脑乐园》
【年(卷),期】2021()11
【摘要】GPS 它是由美国开发的卫星导航定位系统,为全球用户提供高精度定位,
导航和定时服务。
随着GPS 技术的发展,申请领域越来越广泛地从军事领域到平民。
现在越来越多 GPS 接收器嵌入在便携式消费产品中,这项描述GPS接收器该研究
已成为具有实用价值的流行主题。
相关的测试结果表明,我们的前端电路已达到预
期的性能。
目前,前端电路已经开始应用于相关项目的设计,并且对未来的多频多系
统导航接收器的开发具有很好的参考。
【总页数】2页(P0112-0113)
【关键词】GPS接收机;双频;前端电路;原理设计
【作者】何宇云
【作者单位】广东理工学院
【正文语种】中文
【中图分类】TP
【相关文献】
1.GPS接收机射频前端电路原理与设计
2.基于SE4100L设计GPS接收机射频前
端电路3.基于NJ1006的GPS接收机射频前端电路设计4.基于GP2015射频前端电路的GPS接收机设计5.超外差结构GPS接收机射频前端电路仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
射频接收机前端AGC系统的电路设计

射频接收机前端AGC系统的电路设计提纲:一、射频接收机前端AGC系统的基本原理及设计要点二、传统射频接收机前端AGC系统挑战及优化设计技术三、现代射频接收机前端AGC系统设计方法研究四、射频接收机AGC系统的性能评估与实验测量五、未来射频接收机前端AGC系统的发展趋势和展望一、射频接收机前端AGC系统的基本原理及设计要点AGC(Automatic Gain Control)系统是射频接收机的重要组成部分,在信道不稳定的环境下可以实现信号输入电平的自动控制。
其主要功能是控制单位电平内射频前端放大器的信息增益,以确保信号在最佳的动态范围内运行。
射频接收机前端AGC系统的设计要点主要包括信号放大段、包络检波环节、比较环节和控制回路。
其中,信号放大段的设计为AGC系统的核心,关系到整个系统性能的优劣。
当前,射频接收机前端AGC系统的设计主要分为两大类:一类是传统模拟AGC系统,它采用经典的线性控制回路,具有结构简单,功耗低,抗干扰能力强等优点;另一类是数字AGC系统,它基于DSP的现代控制理论,具有精度高,响应速度快等优点。
二、传统射频接收机前端AGC系统挑战及优化设计技术目前,传统AGC系统仍然是射频接收机中最常用的设计方案之一。
然而,传统AGC系统在设计中还存在一些挑战,主要包括信号失真、抗干扰能力不足和高功耗等问题。
为克服这些问题,优化设计技术主要包括:1、引入自适应控制器,利用反馈控制环节提高控制精度和系统鲁棒性,增强系统的稳定性和抗干扰能力。
2、优化模拟电路设计,提高系统带宽、增益平坦度和延时响应特性,并减少失真和噪声干扰。
3、使用低功耗模拟电路设计,降低系统功耗并提高信号处理速度。
三、现代射频接收机前端AGC系统设计方法研究现代射频接收机前端AGC系统采用数字控制理论,利用高速AD/DA转换器实现对系统的数字控制。
其优点在于精度高,控制方便和响应速度快等。
目前,现代AGC系统主要分为三类:1、基于改进的遗传算法和FPGA的AGC系统,该设计主要以FPGA为核心控制器,利用改进的遗传算法实现AGC控制回路,并通过DSP进行算法协调。
GPS接收机射频前端电路

GPS接收机射频前端电路GPS receiver rf circuit[摘要]在GPS设计中采用了高频、低噪声放大器,以减弱天线热噪声及前面几级单元电路对接收机性能的影响;基于超外差式电路结构、镜频抑制和信道选择原理,选用芯片实现了射频单元的三级变频方案。
概述了GPS接收机基本工作原理,提出了一种基于GP2000射频前端电路的GPS接收机方案。
详细说明GP2000射频放大器的设计原理以及外围匹配电路设计方法。
重点叙述了接收机软硬件设计思路和方法。
关键词:GPS;前置放大;变频;相关器。
Abstract: In the design of high frequency used the GPS, low noise amplifier to abate antenna thermal noise and front level in the receiver unit circuit performance influence. Specialized superheterodyne type circuit based on structure, mirror frequency suppression and channel selection principle, choose chip realized the rf unit level 3 frequency conversion plan. Summarizes the basic working principle of GPS receiver, and puts forward a kind of GP2015 rf circuit based on the GPS receiver scheme. Details GP2015 rf design principle and peripheral amplifier matching circuit design method. Key described hardware and software design idea and method for the receive.Keywords: GPS,preamplifier,Frequency conversion,correlator引言:GPS(全球定位系统)以全天候、高精度、自动化、高效率等显著特点及其所独具的定位导航、授时校频、精密测量等多方面的强大功能,使其用途越来越广泛。
GPS接收机的射频前端测试原理和方法
GPS接收机的射频前端测试原理和方法作为GPS接收机重要组成部分的接收机射频前端电路是接收机动态性能的关键部件。
它的很多指标,诸如噪声系数、动态范围、镜频抑制、1dB 压缩点和相位噪声等,都直接影响接收机的性能。
因此,射频指标的准确测量对GPS 接收机性能的准确评估非常重要。
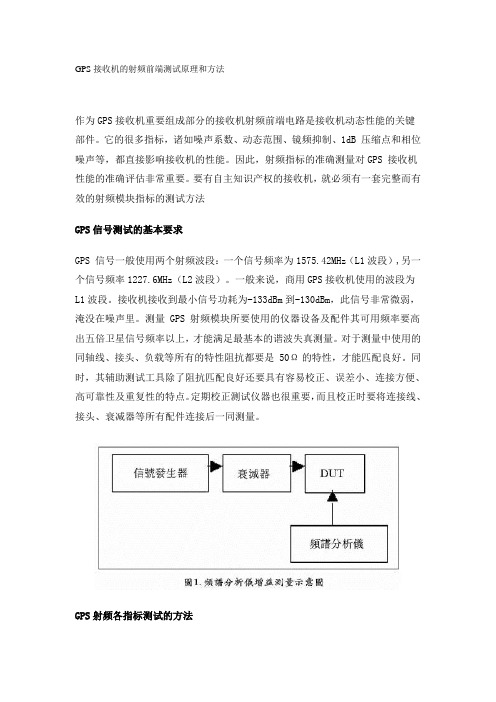
要有自主知识产权的接收机,就必须有一套完整而有效的射频模块指标的测试方法GPS信号测试的基本要求GPS 信号一般使用两个射频波段:一个信号频率为1575.42MHz(L1波段),另一个信号频率1227.6MHz(L2波段)。
一般来说,商用GPS接收机使用的波段为L1波段。
接收机接收到最小信号功耗为-133dBm到-130dBm,此信号非常微弱,淹没在噪声里。
测量 GPS 射频模块所要使用的仪器设备及配件其可用频率要高出五倍卫星信号频率以上,才能满足最基本的谐波失真测量。
对于测量中使用的同轴线、接头、负载等所有的特性阻抗都要是50Ω的特性,才能匹配良好。
同时,其辅助测试工具除了阻抗匹配良好还要具有容易校正、误差小、连接方便、高可靠性及重复性的特点。
定期校正测试仪器也很重要,而且校正时要将连接线、接头、衰减器等所有配件连接后一同测量。
GPS射频各指标测试的方法GPS 射频部分的测试方案很多,其中比较重要的指标有:增益,可控增益范围,输入压缩点,噪声系数,镜频抑制,本振到信号的隔离度,本振相噪等。
增益测量GPS 射频前端的增益是指输入到 ADC 的信号与GPS 天线接收到的信号相比的放大程度。
GPS 接收机射频前端的增益一般都在 110dB 左右。
增益可以使用频谱分析仪来测量。
低噪声放大器、混频器等器件的增益可以用向量网络分析仪来测量S21得到,注意埠的50Ω匹配。
连接如图 2。
有两个系统性能参数体现了接收机的线性度,三阶交调点和 1dB 压缩点。
三阶交调特性会将邻道信号的交调项混到有用信号中,造成信号质量的退化。
但是,对于 GPS 来说,在带内只有一个通道,没有强的邻道干扰信号,因此,主要从1dB压缩性能来考虑系统的线性度。
GPS双频 M码接收机射频前端设计与实现

GPS双频 M码接收机射频前端设计与实现景晗;郑建生;吴越【摘要】介绍了GPS信号体制、新型军用M码的产生方式及其特点,并将新型M码信号与传统GPS信号做了对比。
采用超外差式结构分离元器件方案完成了系统的设计并给出了组成原理框图。
然后对原理框图中每一个功能单元的电路实现进行了设计,合理选择了低噪声放大器、功分器、射频滤波器、射频放大器、混频器、本振发生器、中频滤波器、中频放大器、数控衰减器、末级放大器等,根据选择的器件完成了原理图以及PCB设计,并为系统设计了屏蔽盒。
最后对系统相应的指标进行了测试,测试结果表明该射频前端达到了要求的技术指标。
%RF front-end of M Code GPS Dual-frequency Receiver is designed and realized in this paper.First-ly, the traditional GPS signal system, the generation method of new military M code and its characteristic, and differences between the new M code signal and the traditional GPS signals are introduced.The scheme of separation components with superheterodyne structure is selected to complete the system design and the functional block dia-gram is given.Then the circuit implementation of each functional units in the functional block diagram are analyzed and designed by reasonable selections of low noise amplifier, power splitters, RF filter, RF amplifier, mixer, the vibration generator, intermediate frequency filter, intermediate frequency amplifier, digital control attenuator, final stage amplifier and so on.The schematic and PCB design are completed based on the selected devices, and the shielding box is designed for the system.Thecorresponding indexes of system are tested at the end; results show that the RF front-end meets the requirements.【期刊名称】《科学技术与工程》【年(卷),期】2016(016)009【总页数】11页(P205-215)【关键词】GPS;M码;接收机;射频前端【作者】景晗;郑建生;吴越【作者单位】武汉大学电子信息学院,武汉430072;武汉大学电子信息学院,武汉430072;武汉大学电子信息学院,武汉430072【正文语种】中文【中图分类】TN911.4GPS[1]已经被广泛运用于社会各个领域,但是这种源于20世纪70年代的规划和技术基础的产物在抗干扰、安全性等诸多方面存在着自身难以克服的缺陷。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS接收机射频前端电路原理与设计
摘要:在天线单元设计中采用了高频、低噪声放大器,以减弱天线热噪声及前面几级单元电路对接收机性能的影响;基于超外差式电路结构、镜频抑制和信道选择原理,选用GP2010芯片实现了射频单元的三级变频方案,并介绍了高稳定度本振荡信号的合成和采样量化器的工作原理,得到了导航电文相关提取所需要的二进制数字中频卫星信号。
关键词:GPS接收机灵敏度超外差锁相环频率合成
利用GPS卫星实现导航定位时,用户接收机的主要任务是提取卫星信号中的伪随机噪声码和数据码,以进一步解算得到接收机载体的位置、速度和时间(PVT)等导航信息。
因此,GPS接收机是至关重要的用户设备。
目前实际应用的GPS接收机电路一般由天线单元、射频单元、通信单元和解算单元等四部分组成,如图1所示。
本文在分析GPS卫星信号组成的基础上,给出了射频前端GP2010的原理及应用。
1 GPS卫星信号的组成
GPS卫星信号采用典型的码分多址(CDMA)调制技术进行合成(如图2所示),其完整信号主要包括载波、伪随机码和数据码等三种分量。
信号载波处于L波段,两载波的中心频率分别记作L1和L2。
卫星信号参考时钟频率f0为10.23MHz,信号载波L1的中心频率为f0的154倍频,即:
fL1=154×f0=1575.42MHz (1)
其波长λ1=19.03cm;信号载波L2的中心频率为f0的120倍频,即:
fL2=120×f0=1227.60MHz (2)
其波长λ2=24.42cm。
两载波的频率差为347.82MHz,大约是L2的
28.3%,这样选择载波频率便于测得或消除导航信号从GPS卫星传播至接收机时由于电离层效应而引起的传播延迟误差。
伪随机噪声码(PRN)即测距码主要有精测距码(P码)和粗测距码(C/A码)两种。
其中P 码的码率为10.23MHz、C/A码的码率为1.023MHz。
数据码是GPS卫星以二进制形式发送给用户接收机的导航定位数据,又叫导航电文或D 码,它主要包括卫星历、卫星钟校正、电离层延迟校正、工作状态信息、C/A码转换到捕获P码的信息和全部卫星的概略星历;总电文由1500位组成,分为5个子帧,每个子帧在6s内发射10个字,每个字30位,共计300位,因此数据码的波特率为50bps。
数据码和两种伪随机码分别以同相和正交方式调制在L1载波上,而在L2载波上只用P码进行双相调制,因此L1和L2的完整卫星信号分别为:
SL1(t)=AcCi(t)Di(t)sin(ωL1t+φc) (3)
+ApPi(t)Di(t)cos(ωL1t+φP1)
SL2(t)=BpPi(t)Di(t)cos(ωL2t+φp2) (4)
式中,Ap、Bp、Ac分别为P码和C/A码的振幅;Pi(t)、Ci(t)分别为对应P码和C/A码的伪随机序列码;Di(t)为卫星导航电文数据码;ω
L1、ωL2分别为L1和L2载波信号的角频率;φC和φP1、φP2分别为C/A码和P码对应于载波的起始相位。
合成的GPS信号向全球发射,
随时随地供接收机解算导航定位信息使用。
2 GPS接收机的灵敏度
GPS接收机对信号的检测质量取决于信噪比,当其为“理想接收机”时,接收机输入端的信噪比Si/Ni与其输出端的信噪比So/No相同。
由于实际GPS接收机存在内部噪声,使得(So/No)<(Si/Ni);而噪声越大,输出信噪比越越小,则接收机的性能越差,此时接收机的噪声系数为:
F=(Si/Ni)/(So/No) (5)
式(5)表明由于内部噪声影响,接收机输出端信噪比相对于输入端信噪比变差的倍数,由式(5),输入信号额定功率可表示为:
Si=NiFo(So/No) (6)
式(6)给出了GPS接收机在噪声背景下接收卫星信号的能力,接收机不仅要将输出信号放大到足够的数值,更重要的是要使输出端的信噪比So/No达到所需比值。
令(So/No)≥(So/No)min时对应的接收机输入信号功率的最小可检测信号功率为Simin,通常用它表示接收机的灵敏度。
由于接收机的输入噪声额定功率
Ni=kT0Bn (7)
式(7)中k为玻尔兹曼常数,k=1.38×10 -23J/K,T0为单元电路的室内温度17℃(290K,绝对温度),Bn为单元电路的带宽。
将式(7)代入式(6)可得:
Si=kT0BnFo(So/No) (8)
于是可进一步得到GPS接收机的灵敏度为:
Simin=kT0BnFo(So/No)min (9)。