led驱动显示程序
LED电子显示屏常见驱动方式介绍
LED电子显示屏常见驱动方式介绍2011-05-07 21:47:55 来源:OFWEEK光电显示网关键字:LED电子显示屏驱动方式目前市场上LED显示屏的驱动方式有静态扫描和动态扫描两种,静态扫描又分为静态实像素和静态虚拟,动态扫描也分为动态实像和动态虚拟。
在一定的显示区域内,同时点亮的行数与整个区域行数的比例,称扫描方式;室内单双色一般为1/16扫描,室内全彩LED显示屏一般是1/8 扫描,室外单双色一般是1/4扫描,室外全彩显示屏一般是静态扫描。
驱动IC一般用国产HC595,台湾MBI5026,日本东芝TB62726,一般有1/2 扫,1/4扫,1/8扫,1/16扫。
举列说明:一个常用的全彩模组像素为16*8 (2R1G1B),模组总共使用的led灯是:16*8(2+1+1)=512个,如果用MBI5026 驱动,MBI5026 为16位芯片,512/16=32 (1)如果用32 个MBI5026芯片,是静态虚拟(2)如果用16个MBI5026芯片,是动态1/2扫虚拟(3)如果用8个MBI5026芯片,是动态1/4扫虚拟(4)如果板子上两个红灯串连,用24个MBI5026芯片,是静态实像素(5)用12个MBI5026芯片,是动态1/2扫实像素(6)用6个MBI5026芯片,是动态1/4扫实像素。
在LED单元板,扫描方式有1/16,1/8,1/4,1/2,静态。
如果区分呢?一个最简单的办法就是数一下单元板的led灯数目和74HC595的数量。
计算方法:LED的数目除以74HC595的数目再除以8 =几分之一扫描.实像素与虚拟是相对应的简单来说,实像素屏就是指构成显示屏的红绿蓝三种发光管中的每一种发光管最终只参与一个像素的成像使用,以获得足够的亮度。
虚拟像素是利用软件算法控制每种颜色的发光管最终参与到多个相邻像素的成像当中,从而使得用较少的灯管实现较大的分辨率,能够使显示分辨率提高四倍。
led显示屏程序教程
led显示屏程序教程LED显示屏是一种常用的显示设备,用于显示各种图像和文字。
与传统的显示屏不同,LED显示屏具有亮度高、色彩鲜艳、可视角度大、使用寿命长等特点,因此得到了广泛的应用。
在本教程中,我将为大家介绍如何编写LED显示屏的程序。
首先,我们需要了解LED显示屏的工作原理。
LED显示屏由许多发光二极管(LED)组成,通过控制每个LED的亮度和颜色,可以显示出各种图像和文字。
要编写LED显示屏的程序,我们需要用到一些必要的工具和知识。
第一步是选择合适的硬件。
LED显示屏通常由控制器、驱动芯片和LED模组组成。
控制器负责接收输入信号并将其转化为控制LED的指令,驱动芯片负责控制LED的亮度和颜色,LED模组则是实际的显示区域。
选择合适的硬件非常重要,需要根据实际需求和预算来选择。
第二步是熟悉控制器和驱动芯片的使用。
不同的控制器和驱动芯片有不同的操作方式和指令集,所以我们需要根据具体的硬件型号来学习其使用方法。
通常,我们可以通过查阅相关的技术文档和资料来获取这些信息。
第三步是编写程序。
编写LED显示屏的程序通常需要使用一种编程语言,例如C、Python等。
我们需要根据硬件的要求和驱动芯片的指令集来编写相应的代码。
例如,如果我们使用的是C语言,可以通过引入相应的库文件来调用驱动芯片提供的函数,然后根据需要来设置LED的亮度和颜色。
编写程序时,我们需要考虑到以下几个方面:1. 初始化:在程序开始时,需要进行硬件的初始化。
这包括与控制器和驱动芯片的通信连接、LED模组的设置等。
2. 图像和文字处理:LED显示屏可以显示各种图像和文字,所以我们需要编写相应的代码来处理这些内容。
例如,可以使用图像处理库来处理图像,使用字体库来处理文字。
3. 显示控制:程序需要能够根据需要控制显示内容的刷新频率、亮度和颜色等。
我们可以通过设定相应的参数来完成这些操作。
4. 用户交互:LED显示屏通常会与用户进行交互,所以程序也需要提供相应的用户界面和交互功能。
TM1629驱动程序

{
unsigned char i,k=0;
//i——控制循环次数,k——临时保存读到的数据
DIO=1;
//释放DIO为输入
STB=0;
//保证“STB”为低电平,程序不依赖于之前端口的状态
//保证程序在实际运行中不会出现“端口迷失”
for(i=0;i<8;i++)
{
CLK=0;
//先将“CLK”清零
#define tm1616
1
#define tm1618
2
#define tm1618a
3
#define tm1620
4
#define tm1620b
5
#define tm1623
6
#define tm1624
7
#define tm1626a
8
#define tm1626b
9
#define tm1626c
10
#define tm1626d
11
#define tm1628
12
#define tm1629
13
#define tm1629a
14
#define tm1629b
15
#define tm1629c
16
#define tm1629d
17
#define tm1638
18
#define tm1668
19
Function List:
// 其它内容的说明
1.delay() ——延时程序
2.indate() ——通过MCU向LEDdriver中写入一字节的数据
3.outdate() ——通过MCU从LEDdriver中读出一字节的数据
LED点阵显示屏工作原理及驱动程序
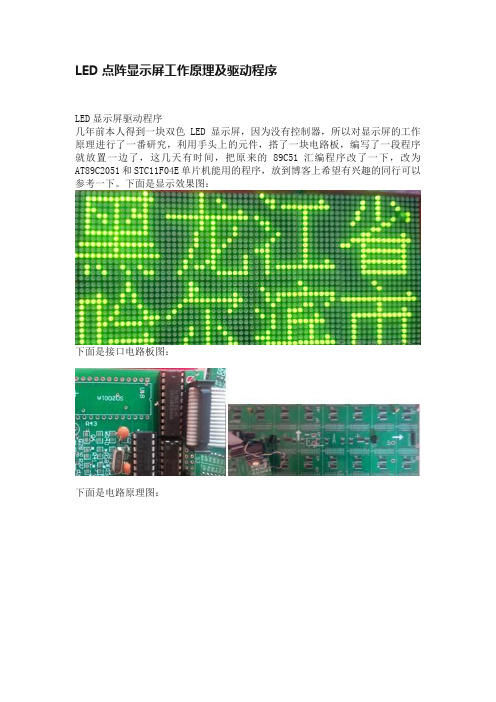
LED点阵显示屏工作原理及驱动程序LED显示屏驱动程序几年前本人得到一块双色LED显示屏,因为没有控制器,所以对显示屏的工作原理进行了一番研究,利用手头上的元件,搭了一块电路板,编写了一段程序就放置一边了,这几天有时间,把原来的89C51汇编程序改了一下,改为AT89C2051和STC11F04E单片机能用的程序,放到博客上希望有兴趣的同行可以参考一下。
下面是显示效果图:下面是接口电路板图:下面是电路原理图:工作原理:这块显示屏是分为上下共32行LED点阵,水平有4块16*16点阵,所以能显示16*16点阵8个汉字。
工作原理是用74ls138做为行扫描,列用74ls595控制,当138扫描到某一行时,595决定哪一列该亮,就这样快速扫描,就形成了图像了。
参见下图:以单色单元板为例走线方式如下图:各信号走向如下:l JP1排针16脚信号A->74HC245的第2脚(信号放大)->74HC245的第18脚->74HC138的第1脚->JP2排针16脚l JP1排针15脚信号B->74HC245的第3脚(信号放大)->74HC245的第17脚->74HC138的第2脚->JP2排针15脚l JP1排针1脚信号OE->74HC245的第4脚(信号放大)->74HC245的第16脚->74HC04D的第1脚->74HC04D的2脚->①74HC138的第5脚->②74HC04D的3脚->74HC04D的4脚->JP2排针1脚l JP1排针11脚信号R->74HC245的第9脚(信号放大)->74HC245的第11脚->最左上角74HC595-1的第14脚->74HC595-1的9脚->74HC595-2的14脚->74HC595-2的9脚->最右下角74HC595-16的14脚->74HC595-16的9脚->JP2排针11脚我现在用的是双色板,JP1各端口含义如下:ABCD是显示屏电路板上的74LS138地址译码端,单片机寄存器R3控制行扫描,当R3从00000000到00010000增加时ABCD的变化给138译码,当R3=0FH 时正好扫描16行,当进位到10时扫描结束,OE是138的片选使能端,低电平有效。
LED驱动程序
普通字符设备LED驱动程序(IO映射内存实现).驱动程序:[cpp] view plaincopyprint?01.#include <linux/module.h> //内核模块头文件02.#include <linux/moduleparam.h> //内核模块参数头文件03.#include <linux/kernel.h> //printk头文件04.05.#include<asm/io.h>//ioremap需要06.//包含有可装载模块需要的大量符合和函数的定义;07.#include <linux/init.h>08.//指定初始化和清除函数;09.10.//struct file_operactions 相关头文件11.#include <linux/fs.h>12.#include <asm/uaccess.h>13.14.//struct cdev 相关头文件15.#include <linux/types.h>16.#include <linux/cdev.h>17.18.//定义设备名称19.#define DEVICE_NAME "led2"20.21.//定义主次设备号22.static unsigned int LedMajor=0;23.static unsigned int LedMinor=0;24.25./* 注册字符设备*/26.static struct cdev *led_cdev;27.static dev_t dev; //设备号28.29.volatile unsigned int long *gpb_con = NULL;30.volatile unsigned int long *gpb_data = NULL;31.32.33.static int led_ioctl(struct inode *inode, struct file *file,34. unsigned int cmd, unsigned long arg)35.{36.37. if((cmd>1) | (cmd<0) | (arg>3) | (arg<0))38. return -EINV AL;39.40. switch(cmd)41. {42. case 0:43. *gpb_data&= ~(1<<(arg+5)); //044. break;45. case 1:46. *gpb_data|= (1<<(arg+5)); //147. break;48.49. default:50. return -EINV AL;51.52. }53.54. return 0;55.}56.57.58.static int led_open(struct inode *inode, struct file *file)59.{60. printk("led_open\n");61.62. //映射I/O内存63. gpb_con = (volatile unsigned long *)ioremap(0x56000010,16); //0x56000010为GPIOB控制寄存器的物理地址64. gpb_data = gpb_con+1; //这里+1是加了4个字节,因为指针+1是以指针的长度为单位的(unsigned long *)65.66. /* 配置GPB5,6,7,8为输出*/67. *gpb_con |= (1<<(5*2)) | (1<<(6*2)) | (1<<(7*2)) | (1<<(8*2));68. /* 初始化为灭*/69. *gpb_data |=(1<<5) | (1<<6) | (1<<7) | (1<<8);70.71. printk("leaving led_open\n");72. return 0;73.74.}75.76.static int led_release(struct inode *inode,struct file *file)77.{78.79. printk("close major=%d, minor=%d\n", imajor(inode), iminor(inode));80. return 0;81.}82.83.static struct file_operations chardev_fops={84. .owner = THIS_MODULE,85. .open = led_open,86. .release = led_release,87. .ioctl = led_ioctl,88.};89.90.91.static int __init dev_init(void)92.{93. int result;94./*分配设备编号*/95. if(LedMajor)96. {97. dev=MKDEV(LedMajor,LedMinor);//创建设备编号98. result=register_chrdev_region(dev,1,DEVICE_NAME);99. }100. else101. {102.result=alloc_chrdev_region(&dev,LedMinor,1,DEVICE_NAME); 103. LedMajor=MAJOR(dev);104. }105. if(result<0)106. {107. printk(KERN_W ARNING"LED: cannot get major %d \n",LedMajor);108. return result;109. }110./* 注册字符设备*/111. led_cdev=cdev_alloc();//为struct cdev 分配空间112.113. cdev_init(led_cdev,&chardev_fops);//初始化struct cdev 114.115. led_cdev->owner=THIS_MODULE;116.117. result=cdev_add(led_cdev,dev,1);118.119. if(result)120. printk("<1>Error %d while register led device!\n",result); 121.122. printk("initialzed.\n");123.124. return 0;125.}126.127.static void __exit dev_exit(void)128.{129. unregister_chrdev_region(MKDEV(LedMajor,LedMinor),1); 130. cdev_del(led_cdev);131.}132.133.module_init(dev_init);134.module_exit(dev_exit);135.MODULE_LICENSE("GPL");136.MODULE_AUTHOR("Bai");#include <linux/module.h> //内核模块头文件#include <linux/moduleparam.h> //内核模块参数头文件#include <linux/kernel.h> //printk头文件#include<asm/io.h>//ioremap需要//包含有可装载模块需要的大量符合和函数的定义;#include <linux/init.h>//指定初始化和清除函数;//struct file_operactions 相关头文件#include <linux/fs.h>#include <asm/uaccess.h>//struct cdev 相关头文件#include <linux/types.h>#include <linux/cdev.h>//定义设备名称#define DEVICE_NAME "led2"//定义主次设备号static unsigned int LedMajor=0;static unsigned int LedMinor=0;/* 注册字符设备*/static struct cdev *led_cdev;static dev_t dev; //设备号volatile unsigned int long *gpb_con = NULL;volatile unsigned int long *gpb_data = NULL;static int led_ioctl(struct inode *inode, struct file *file,unsigned int cmd, unsigned long arg){if((cmd>1) | (cmd<0) | (arg>3) | (arg<0))return -EINV AL;switch(cmd){case 0:*gpb_data&= ~(1<<(arg+5)); //0break;case 1:*gpb_data|= (1<<(arg+5)); //1break;default:return -EINV AL;}return 0;}static int led_open(struct inode *inode, struct file *file){printk("led_open\n");//映射I/O内存gpb_con = (volatile unsigned long *)ioremap(0x56000010,16); //0x56000010为GPIOB控制寄存器的物理地址gpb_data = gpb_con+1; //这里+1是加了4个字节,因为指针+1是以指针的长度为单位的(unsigned long *)/* 配置GPB5,6,7,8为输出*/*gpb_con |= (1<<(5*2)) | (1<<(6*2)) | (1<<(7*2)) | (1<<(8*2));/* 初始化为灭*/*gpb_data |=(1<<5) | (1<<6) | (1<<7) | (1<<8);printk("leaving led_open\n");return 0;}static int led_release(struct inode *inode,struct file *file){printk("close major=%d, minor=%d\n", imajor(inode), iminor(inode));return 0;}static struct file_operations chardev_fops={.owner = THIS_MODULE,.open = led_open,.release = led_release,.ioctl = led_ioctl,};static int __init dev_init(void){int result;/*分配设备编号*/if(LedMajor){dev=MKDEV(LedMajor,LedMinor);//创建设备编号result=register_chrdev_region(dev,1,DEVICE_NAME);}else{result=alloc_chrdev_region(&dev,LedMinor,1,DEVICE_NAME);LedMajor=MAJOR(dev);}if(result<0){printk(KERN_W ARNING"LED: cannot get major %d \n",LedMajor);return result;}/* 注册字符设备*/led_cdev=cdev_alloc();//为struct cdev 分配空间cdev_init(led_cdev,&chardev_fops);//初始化struct cdevled_cdev->owner=THIS_MODULE;result=cdev_add(led_cdev,dev,1);if(result)printk("<1>Error %d while register led device!\n",result);printk("initialzed.\n");return 0;}static void __exit dev_exit(void){unregister_chrdev_region(MKDEV(LedMajor,LedMinor),1);cdev_del(led_cdev);}module_init(dev_init);module_exit(dev_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("Bai");这段代码把GPB寄存器的物理地址映射到内存上,再进行操作。
单片机课程设计--+16x16点阵LED电子显示屏的设计

单片机课程设计-- 16x16点阵LED电子显示屏的设计第一章系统总体方案设计LED驱动显示采用动态扫描方法, 动态扫描方式是逐行轮流点亮, 这样扫描驱动电路就可以实现多行的同名列共用一套列驱动器。
以16×16点阵为例, 把所有同一行的发光管的阳极连在一起, 把所有同一列的发光管的阴极连在一起(共阳的接法), 先送出对应第1行发光管亮灭的数据并锁存, 然后选通第1行使其燃亮一定的时间, 然后熄灭;再送出第2行的数据并锁存, 然后选通第2行使其燃亮相同的时间, 然后熄灭;…第16行之后, 又重新燃亮第1行, 反复轮回。
当这样轮回的速度足够快(每秒24次以上), 由于人眼的视觉暂留现象, 就能看到显示屏上稳定的图形。
该方法能驱动较多的LED, 控制方式较灵活, 而且节省单片机的资源。
显示数据传输采用串行传输的方法, 控制电路可以只用一根信号线, 将列数据一位一位传往列驱动器, 在硬件方面无疑是十分经济的。
但串行传输过程较长, 数据按顺序一位一位地输出给列驱动器, 只有当一行的各列数据都已传输到位之后, 这一行的各列才能并行地进行显示。
对于串行传输方式来说, 列数据准备时间可能相当长, 在行扫描周期确定的情况下, 留给行显示的时间就太少了, 以致影响到LED的亮度。
采用串行传输中列数据准备和列数据显示的时间矛盾, 可以采用重叠处理的方法。
即在显示本行各列数据的同时, 传送下一行的列数据。
为了达到重叠处理的目的, 列数据的显示就需要有锁存功能。
对于列数据准备来说, 它应能实现串入并出的移位功能。
这样, 本行已准备好的数据打入并行锁存器进行显示时, 串行移位寄存器就可以准备下一行的列数据, 而不会影响本行的显示。
系统框图如图一图一点阵显示器硬件系统框图第二章系统硬件电路的设计硬件电路大致上可以分为单片机系统及外围电路、列驱动电路和行驱动电路三部分。
一. 单片机系统及外围电路单片机采用89C51或更高频率的晶振, 以获得较高的刷新频率, 使得显示更稳定。
LED点阵显示屏驱动方案

LED 点阵显示屏驱动方案王宏民【摘 要】 LE D 半导体发光器件的驱动问题的解决方案。
如何处理由于应用量大、高度密集排列而造成可应用空间有限的问题。
设计控制驱动单元时要考虑设计、生产和调试成本。
同时要考虑系统的级联和可扩充性。
【主题词】 LE D 显示屏 控制驱动1 引言目前以LE D 半导体发光器件为显示介质的大型显示屏已广泛地被应用。
其控制驱动方式各种各样,也各具特色。
在LE D 发光管的驱动设计上也有许多的方式。
由于大型的点阵显示屏是由上万个或几十万个LE D 发光象元组成,这也就需要大量的驱动电路来支持。
那末驱动电路设计的好坏就直接影响系统的生产制造成本和显示的效果及系统的运行性能。
设计一个即能满足控制驱动要求,同时使用器件少成本底的单元控制驱动方案是必要的。
下面我们就以LE D8×8点阵模块(共阳极)为显示器件的显示屏为例,来论述一下几个驱动方案并加以比较。
众所周知以LE D8×8点阵模块为显示器件的显示屏其工作方式是扫描式的(1/8),驱动电路可分为行和列。
每一行的模块(可以是四个、六个或更多)的行可以并联形成八条行线,显示点阵的列数为8×并联的模块数。
由于控制等方面的原因一般是将一个较大的显示系统分为几个标准化的小单元。
每个小单元是完全一样的,这将有利于灵活组屏和方便生产调试。
对于标准单元的设计应本着这样的原则:较少的输入引入;方便的级联;针对这样的驱动单元我们来看一下几个设计方案。
2 串行控制驱动方式所谓串行控制驱动方式就是显示的数据是通过串行方式送入点(列)驱动电路。
其特点是单元内的线路连接简单,这给印刷电路板的设计带来了方便。
同时也减少了印刷电路板的布线密度,从而为生产和调试带来了有利的一面。
当然,单元的可靠性也相应的提高了。
串行控制驱动方式可选用的芯片有:MC4094、74LS595、74HC595、6B595、9094等等。
其中MC4094、74HC595均为C MOS 芯片,应与功率芯片结合使用;例如使用2803驱动芯片。
TM1637 LED驱动控制专用电路说明书

特性描述TM1637 是一种带键盘扫描接口的LED(发光二极管显示器)驱动控制专用电路,内部集成有MCU 数字接口、数据锁存器、LED 高压驱动、键盘扫描等电路。
本产品性能优良,质量可靠。
主要应用于电磁炉、微波炉及小家电产品的显示屏驱动。
采用DIP20/SOP20的封装形式。
功能特点采用功率CMOS 工艺显示模式(8 段×6 位),支持共阳数码管输出键扫描(8×2bit),增强型抗干扰按键识别电路辉度调节电路(占空比8 级可调)两线串行接口(CLK,DIO)振荡方式:内置RC 振荡内置上电复位电路内置自动消隐电路封装形式:DIP20/SOP20管脚信息GNDSEG1/KS1SEG2/KS2SEG3/KS3SEG4/KS4SEG5/KS5 SEG6/KS6 SEG7/KS7 SEG8/KS8GRID1 GRID2 GRID3 GRID4 GRID5GRID6VDDDIOCLKK1K2 1234567891011121314151617181920管脚功能符号管脚名称管脚号说明DIO 数据输入/输出 17 串行数据输入/输出,输入数据在SLCK 的低电平变化,在SCLK 的高电平被传输,每传输一个字节芯片内部都将在第八个时钟下降沿产生一个ACK CLK 时钟输入 18 在上升沿输入/输出数据K1~K2 键扫数据输入 19-20 输入该脚的数据在显示周期结束后被锁存 SG1~SG8 输出(段) 2-9 段输出(也用作键扫描),N 管开漏输出 GRID6~GRID1输出(位) 10-15 位输出,P 管开漏输出 VDD 逻辑电源 16 接电源正 GND逻辑地1接系统地在干燥季节或者干燥使用环境内,容易产生大量静电,静电放电可能会损坏集成电路,天微电子建议采取一切适当的集成电路预防处理措施,如果不正当的操作和焊接,可能会造成ESD 损坏或者性能下降, 芯片无法正常工作。
读键扫数据键扫矩阵为8×2bit ,如下所示:S1S5S9S13S2S6S10S14S3S7S11S15S4S8S12S16K1K2S G 1S G 2S G 3S G 4S G 5S G 6S G 7S G 8在有按键按下时,读键数据如下:(低位在前,高位在后)SG1SG2SG3SG4SG5SG6SG7SG8K1 1110_1111 0110_1111 1010_1111 0010_1111 1100_1111 0100_1111 1000_1111 0000_1111 K2 1111_01110111_01111011_01110011_01111101_01110101_01111001_01110001_0111注意:在无按键按下时,读键数据为:1111_1111,低位在前,高位在后。