MATLAB_DSP在无传感器矢量控制中的应用
Luenberger观测器在永磁同步电机无传感器控制中的应用研究
Luenberger观测器在永磁同步电机无传感器控制中的应用研究周双飞;黄海波;简炜【摘要】In the vector control of permanent magnet synchronous motor (PMSM),according to the principle of Luenberger observer,a based on Luenberger observer of PMSM rotor speed and position estimation method was proposed,an effective solution to some drawbacks of the PMSM due to the installation of mechanical ingMATLAB/Simulink tool to build the control system simulation model and simulation,simulation results showed that the control system had good control performance.Finally,in STM32F103ZET6 as the control core of the hardware system for algorithm implementation.The experimental results showed that the PMSM control system based on Luenberger observer had high control precision and good stability.%在永磁同步电机(PMSM)矢量控制中,根据Luenberger观测器原理,提出了一种基于Luenberger 观测器的PMSM 转子速度和位置的估算方法,有效解决了PMSM由于机械传感器安装带来的一些弊端.利用MATLAB/Simulink工具搭建控制系统仿真模型并进行仿真验证,仿真结果表明控制系统具有良好的控制性能.最后,在以STM32F103ZET6为控制核心的硬件系统上进行算法的实现,试验结果表明基于Luenberger 观测器的PMSM控制系统具有较高的控制精度且稳定性较好.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)010【总页数】5页(P59-62,66)【关键词】永磁同步电机;无速度传感器;Luenberger观测器【作者】周双飞;黄海波;简炜【作者单位】湖北汽车工业学院电气与信息工程学院,湖北十堰442002;湖北汽车工业学院电气与信息工程学院,湖北十堰442002;湖北汽车工业学院电气与信息工程学院,湖北十堰442002【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有高动态性能、高功率密度、轻量化等特点,随着电力电子技术和微处理器技术的发展,PMSM得到广泛的应用。
基于DSP的模型参考自适应无速度传感器矢量控制
# # "" *
’( # ’ " ’ $ 4 ’# ( # "" # $" 9 ’$ ’$
(ቤተ መጻሕፍቲ ባይዱ)
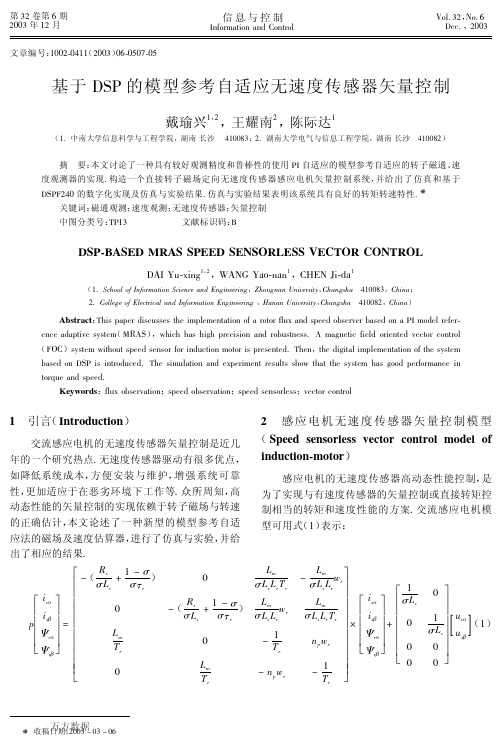
! 0 4" 电压模型 5 5 使用定子电压、 电流的测量值, 在两相静止坐标 系下, 定子磁场可表示为: ! # "! * ( ; "! 4 % " # "! 4 ; 8<(-! ) " ! # "" * ( ; "" 4 % " # "" 4 ; 8<(-" ) " (A) (B)
!" 磁场与转速估算器 ( #$%&’()* +)’,- $&./($()/& 01’’- ’0()2$(/.)
本文提出的磁场估算器是一个全阶的定转子自 适应的磁场观测器, 由电机的开环电流模型和电压
[ ! ’ (] 0 其算法框图如图 ! 所示0 模型组成
由参考文献 [?] 知, .D 调节器的系数 = - 、 = > 可通过下 式确定, 设 .! 、 .# 为系统的两个极点, .! 为低速时 .# 为高速时电压模型的极点0 的电流模型极点, .# ; 5 = - * .! 9 .# = > * .! , 从而推得两相静止坐标系下的转子磁场为: # $! * # $" * ’$ ’ " ’ $ 4 ’# ( # "! # "! 4 ’( ’( ’$ ’ " ’ $ 4 ’# ( # "" # "" 4 ’( ’( ( !# ) ( !( ) ( !! )
其中 ; 8<(- 是考虑到纯积分器引起的误差以及低速 时定子电阻测量误差所加的补偿分量, 该补偿分量 可根据两个模型输出的定子磁链之差估算出来: ; 8<(-! *( = - 9 = > ; 8<(-" *( = - 9 = > ! ) ( # "! 4 # #"! ) " (C)
基于MATLAB的无速度传感器矢量控制仿真
基于MATLAB的无速度传感器矢量控制仿真陈荣华;袁秀平【摘要】设计了参数自调整模糊控制代替常规的PI调节器,构建无速度传感器异步机矢量控制系统,并运用MatlabSimulink工具构造异步电动机的矢量控制解藕数学模型、自适应神经网络速度辩识模型和参数自调整模糊控制器,对无速度传感器矢量控制系统进行了仿真.仿真结果表明:自适应神经网络速度辨识具有较高的辨识精度,且该系统具有良好动、静态性能.【期刊名称】《上海师范大学学报(自然科学版)》【年(卷),期】2006(035)004【总页数】5页(P41-45)【关键词】无速度传感器;异步电机模型;神经网络速度辩识;矢量控制;仿真【作者】陈荣华;袁秀平【作者单位】江西教育学院,南昌,330029;上海师范大学,机械与电子工程学院,上海,201418【正文语种】中文【中图分类】TP20 引言随着近年来电力电子工业和计算机技术的迅猛发展,交流调速系统正广泛应用于工业生产的各个领域,为了满足高性能交流传动的需要,必须对转速进行闭环控制,但由于速度传感器的安装、维护、非线性和低速性能方面的问题,影响了异步电动机调速系统的简便性、廉价性、可靠性.因此越来越多的学者和公司将目光放在无速度传感器控制系统的研究和开发上,无速度传感器控制系统的核心问题就是对转子的速度进行估计和辨识,主要的出发点就是用直接计算、参数辨识、状态估计、间接测量等手段,从定子边比较易测量的量(如定子电压电流)中计算出与速度有关的量,从而得到转子速度,并将其运用到速度反馈控制系统中[1~3].随着近年来新的功能强大的数字信号处理器(DSP)芯片的发展,各国学者在这方面已作了大量的工作,较为典型的估计方法有:由电机方程式直接计算、模型参考自适应法、扩展卡尔曼滤波法、滑模变结构法、定子侧电量FFT分析等,但是这些方法只是解决了某一方面问题,都是不很完善.近十年来,由于仿真技术的出现,使得其在工程设计、理论研究、产品开发等方面得到了广泛的应用[4,5].特别是Math Works公司的MATLAB/SIMULINK产品,具有强大的数值计算、数据分析、可视化及动态仿真功能.本文运用MATLAB/SIMULINK工具进一步分析异步电机的动态特性、速度辨识方法、控制器设计及其构成的无速度传感器交流调速系统的性能,为电机、自适应神经网络及系统的优化设计提供一种高效便捷的手段.1 无速度传感器矢量控制系统设计1.1 系统组成和工作原理异步电机无速度传感器矢量控制系统[6],见图1.其工作原理:采用磁链开环、速度闭环的结构形式、结合电压跟踪逆变器,对电机进行矢量控制.图 1 无速度传感器矢量控制系统1.2 系统各组成部分设计1.2.1 主电路主电路由整流、中间滤波和逆变部分组成.主电路采用典型的交-直-交电压源型IGBT-PWM通用变频器结构,逆变部分通过功率器件的导通和关断,输出交变的电压序列.它的功能是将恒频恒压交流电源转换为可调频调压的三相交流电源供给异步电动机的定子绕组.1.2.2 控制系统控制系统主要由转差计算、速度观测、模糊控制、转子磁链相位偏差计算、电流滞环比较环节等几部分组成.控制电路的设计思想:通过给定磁链产生M轴电流分量im1,通过转速误差产生T轴电流分量it1;然后经过二旋转到三静止的坐标变换,得到三相静止定子给定电流给定电流与观测到的电机定子电流比较,经过电流滞环比较器产生等幅不等宽的SPWM波,驱动逆变器的六个开关管.为了保持频率控制与电流控制的协调,必须考虑转差的计算.1.3 系统控制器设计本系统采用带参数自调整的模糊控制器(见图2).图中h1,h2和h3是论域调整参数,用以分别修正量化因子K1,K2和比例因子K3.当转速偏差或偏差变化率较大时(主要考虑系统的响应问题,稳态精度问题可暂不考虑),可以通过减少量化因子K1和K2来降低对e和ec的分辨率,同时加大比例因子K3以取较大的控制变量,使系统响应加快;当转速偏差或偏差变化率较小时,则增大量化因子K1和K2来提高对e和ec的分辨率,同时减小比例因子K3,取较慎微的控制量,以提高控制精度,减少超调量和提高动态品质.可以看出,参数自调整的思想正是人们实际经验中的粗调和细调的概念.图 2 带参数自调整的模糊控制器2 系统仿真模型建立运用Matlab\Simulink工具分别构建异步电动机的矢量控制解藕数学模型(图3)和参数自调整模糊控制器模型(图4).图 3 电机仿真模型图 4 带参数自调整的模糊控制器仿真模型3 系统仿真3.1 系统初始化对电机及控制系统建模的基础上,建立无速度传感器矢量控制异步电机仿真系统. 3.1.1 电机参数输入不同的电机有不同的参数,同时表现出不同的观测值,本系统选择西安电机厂生产的Y132-8系列三相异步电.机为例进行验证.电机参数:额定功率PN= 2.2KW,极对数p = 4,额定电压UN = 380V,额定电流IN =5.8A,定子电阻Rs =1.898Ω,转子电阻Rr = 1.454Ω,定子电感Ls = 196mh,转子电感Lr =196mh,互感Lm =186mh,转动惯量J = 0.02Kg ·m2,采样周期T = 2e-4s.通过输入电机参数,可计算出电机仿真模型中所需参数,从而为电机下一步进行仿真作好准备.3.1.2 电机仿真系统电机仿真系统是以异步电机模型而构造如图3所示的仿真模块,主要对异步电机在M,T坐标下的性能研究,可观测到定、转子在M,T坐标系和α,β 坐标系下的电压、电流、磁链、转矩、转速等多个量.3.1.3 主电路初始化主电路初始化主要给整流电路、滤波器、和逆变器设置初始值.3.1.4 控制系统初始化控制系统初始化是完成I/V变换中所需电机参数Rs,Rr,Ls,Lr,Lm的设定、模糊控制表的载入、自适应神经网络速度辨识系统学习速率Learn_rate和采样周期T的设定.3.2 系统仿真在无速度传感器矢量控制系统中,转速调节器分别采用PID控制、模糊控制算法,对系统进行仿真.3.2.1 突加、减负载时,系统性能比较表 1 4种不同情况下系统采用PID和自调整模糊控制的性能指标突加一半额定负载恢复时间超调量%稳态误差突加额定负载恢复时间超调量%稳态误差一半额定负载起动恢复时间超调量%稳态误差额定负载起动恢复时间超调量%稳态误差PID 0.3s61.2%0.4s3.21%.35s31.2%0.5s51.6%模糊0.2s0.60.4%0.2s10.4%0.2s1.30.5%0.4s2.20.8%3.2.2 低、高速时,系统性能比较(图5,6)图 5 系统在低速空载时转速、转矩曲线图 6 系统在高速空载时转速、转矩曲线表 2 低、高速时系统采用PID和自调整模糊控制的性能指标给定转速95r/min超调%起动时间(s)过渡时间(s)制动时间(s)给定转速750r/min 超调%起动时间(s)过渡时间(s)制动时间(s)PID60.10.370.1240.550.350.3模糊4.710.070.40.081.330.550.20.24 系统性能分析从仿真曲线、表1和表2可以看出:在突加减负载时,模糊控制比PID控制能使转速较快的恢复到给定值,这是因为参数自调整模糊控制能够吸收人的控制经验,在控制过程中能根据误差及误差变化率对控制量进行调整,响应较快,鲁棒性强,能有效适应系统的多种变化情况.而PID控制中控制参数(Kp,KI, KD)不能根据系统误差,误差变化率作适当调整,以至于不能适应系统的变化情况.5 结语由仿真结果看出用Matlab\Simulink工具,可采用不同的控制法对无速度传感器矢量控制系统进行动态仿真研究,且具有方便、直观和准确的优点.同时可以得出与PID控制在同样条件下的控制效果相比,自调整模糊控制器在改善被控过程的动态性能、稳态性能与提高抗干扰能力以及对参数时变的适应能力等方面均优于常规PID控制,且本控制器设计简单、易于实现,对提高采用PID控制的过程控制质量具有相当的实际意义.参考文献:[1] 纪志成.异步电机无速度传感器矢量控制系统速度辩识方法[J].无锡轻工大学学报,1997,17(4),93-98.[3] 陈多磊.无速度传感器矢量控制中转速估计的研究[J].电气自动化,2000(3).[4] 冯垛生,曾岳南.无速度传感器矢量控制原理与实践[M].北京:机械工业出版社,1997.1-144.[5] 闻新,周露.MATLAB模糊逻辑工具的分析与应用[M].北京:科学出版社,1998.34-89.[6] 张晓华.控制系统数字仿真与CAD[M].北京:机械工业出版社,1999.1-178.[7] 海田英俊.无速度传感器矢量控制系统的世界结构[J].变频器世界,1999(3).。
基于Matlab及DSP的异步电机矢量控制系统的实现
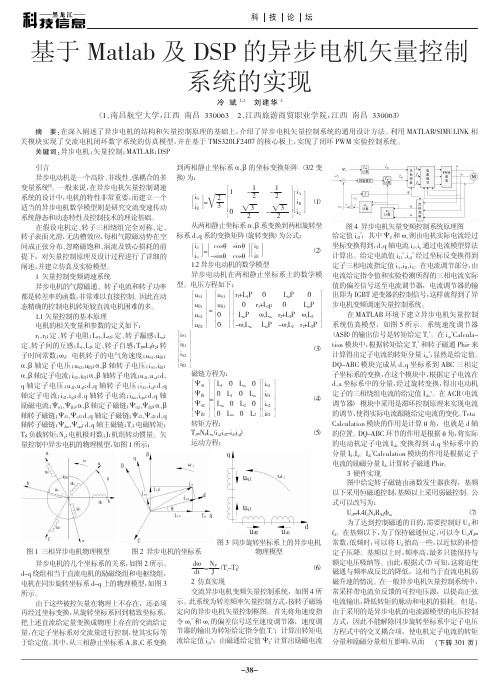
科技论坛基于Matlab 及DSP 的异步电机矢量控制系统的实现冷斌1,2刘建华2(1、南昌航空大学,江西南昌3300632、江西旅游商贸职业学院,江西南昌330063)引言异步电动机是一个高阶、非线性、强耦合的多变量系统[1]。
一般来说,在异步电机矢量控制调速系统的设计中,电机的特性非常重要,而建立一个适当的异步电机数学模型则是研究交流变速传动系统静态和动态特性及控制技术的理论基础。
在假设电机定、转子三相绕组完全对称、定、转子表面光滑,无齿槽效应,每相气隙磁动势在空间成正弦分布、忽略磁饱和、涡流及铁心损耗的前提下,对矢量控制原理及设计过程进行了详细的阐述,并建立仿真及实验模型。
1矢量控制变频调速系统异步电机的气隙磁通、转子电流和转子功率都是转差率的函数,非常难以直接控制。
因此在动态精确的控制电机转矩较直流电机困难的多。
1.1矢量控制的基本原理电机的相关变量和参数的定义如下:r 1、r 2:定、转子电阻;L σ1、L σ2:定、转子漏感;L m :定、转子间的互感;L 1、L 2:定、转子自感;T 2=L 2/r 2:转子时间常数;ωr :电机转子的电气角速度;u α1、u β1:α、β轴定子电压;u α2、u β2:α、β轴转子电压;i α1、i β1:α、β轴定子电流;i α2、i β2:α、β轴转子电流;u d1、u q1:d 、q 轴定子电压;u d2、u q2:d 、q 轴转子电压;i d1、i q1:d 、q 轴定子电流;i d2、i q2:d 、q 轴转子电流;i dm 、i qm :d 、q 轴励磁电流;Ψα1、Ψβ1:α、β轴定子磁链;Ψα2、Ψβ2:α、β轴转子磁链;Ψd1、Ψq1:d 、q 轴定子磁链;Ψd2、Ψq2:d 、q 轴转子磁链;Ψdm 、Ψqm :d 、q 轴主磁链;T e :电磁转矩;T l :负载转矩;N p :电机极对数;J :机组转动惯量。
矢量控制中异步电机的物理模型,如图1所示:异步电机的几个坐标系的关系,如图2所示。
Matlab技术在模糊控制中的应用指南
Matlab技术在模糊控制中的应用指南在现代控制理论中,模糊控制是一种重要的控制方法,它能够应对系统模型复杂、参数变化频繁的情况。
而在实际应用中,借助计算机软件的帮助是非常重要的。
Matlab是一种功能强大的数值计算与科学分析软件,广泛应用于各类工程领域。
本文将介绍Matlab技术在模糊控制中的应用指南,并具体讨论其在系统建模、控制设计和性能评估中的应用。
一、系统建模在进行模糊控制设计之前,需要对待控制系统进行建模。
Matlab提供了一系列工具和函数,可以帮助我们快速构建系统模型。
首先,我们可以使用Matlab提供的信号处理工具箱对系统进行频域分析,得到系统的传递函数模型。
该模型能够反映系统的频率响应特性,为后续的控制器设计提供依据。
其次,对于一些非线性系统,我们可以使用Matlab的系统辨识工具箱进行系统辨识,得到系统的状态空间模型。
通过观测系统的输入输出数据,系统辨识能够自动拟合最佳的模型参数,并给出拟合效果的评估指标。
借助于系统辨识工具箱,我们可以更好地理解系统的动态特性,并得到适用于模糊控制的状态空间模型。
另外,Matlab还提供了模糊逻辑工具箱,可以帮助我们进行模糊推理。
在模糊控制中,我们常常需要将模糊语言转换为具体的控制规则,从而实现对系统的控制。
Matlab的模糊逻辑工具箱提供了一系列函数,可以进行模糊模型的构建、模糊集合的定义、模糊关系的建立等操作。
通过这些功能,我们可以快速构建模糊推理系统,实现模糊控制的目标。
二、控制设计在模糊控制的设计过程中,控制器的设计是一个重要环节。
Matlab提供了多种控制器设计方法和工具,可以帮助我们实现不同类型的控制器设计。
首先,针对线性系统,Matlab提供了各类经典控制器设计方法,如PID控制器、根轨迹法、频率响应法等。
这些方法可以通过Matlab提供的函数直接调用,实现对系统的线性控制。
其次,对于非线性系统,我们可以使用模糊逻辑工具箱中提供的模糊控制器设计方法。
基于DSP的无速度传感器矢量控制系统设计

基于DSP的无速度传感器矢量控制系统设计
任相强;黄耀志
【期刊名称】《现代电子技术》
【年(卷),期】2006(29)6
【摘要】提出了一种基于DSP,MCU和IPM的交流变频调速系统,该系统由独立的电源模块、操作面板、控制板和功率板组成.操作面板与控制板之间利用扩展的异步串行口实现通讯,介绍了其硬件、软件及通讯协议设计方法,以及操作面板功能参数设置流程.结合感应电动机在两相静止坐标系上的数学模型及扩展卡尔曼滤波器算法,实现了对感应电动机的无速度传感器矢量控制.实验表明该系统造价低廉、精度较高、工作稳定可靠,完全可以满足科研教学和实际生产的需要.
【总页数】4页(P18-20,23)
【作者】任相强;黄耀志
【作者单位】福州大学,机械工程学院,福建,福州,350002;福州大学,机械工程学院,福建,福州,350002
【正文语种】中文
【中图分类】TP212
【相关文献】
1.基于DSP的异步电机无速度传感器矢量控制系统研究 [J], 肖兵;薛琦
2.基于DSP的无速度传感器异步电机矢量控制 [J], 陈伟昌;王孝洪;田联房
3.基于DSP的无速度传感器交流异步电机矢量控制系统设计 [J], 薛易;叶瑰昀
4.基于DSP的异步电机无速度传感器的矢量控制研究 [J], 刘宝华
5.基于ADSP-21990的无速度传感器矢量控制系统设计 [J], 冯准; 王晓明
因版权原因,仅展示原文概要,查看原文内容请购买。
Matlab技术在传感器设计中的应用
Matlab技术在传感器设计中的应用导言:传感器是现代科技领域中的重要组成部分,它们能够将各种物理量转换为电信号,并实时监测和测量目标物体的状态和信息。
传感器的设计与性能直接影响着监测精度和可靠性,因此,寻找一种高效的方法来设计和测试传感器是非常重要的。
在这方面,Matlab技术的应用为传感器设计带来了革命性的改进。
本文将深入探讨Matlab技术在传感器设计中的应用,并讨论其在传感器参数优化、信号处理以及系统仿真方面的优势。
一、传感器参数优化传感器的性能直接受到其参数设置的影响,因此,优化传感器参数对于提高传感器性能至关重要。
Matlab技术提供了一种便捷的方法来实现传感器参数优化。
首先,通过建立传感器的数学模型,可以将传感器的输出与其参数之间的关系进行建模。
然后,利用Matlab中的优化工具箱,可以基于设定的优化目标函数,自动搜索最优的传感器参数组合。
通过这种方法,传感器设计师可以快速地找到最佳的传感器参数,从而提高传感器的灵敏度、精度和稳定性。
二、传感器信号处理传感器接收到的原始信号往往包含噪声和杂波,这些干扰信号会对测量结果造成误差。
因此,对传感器的信号进行有效的处理是提高传感器性能的关键。
Matlab 技术提供了一系列强大的信号处理工具,可以对传感器信号进行滤波、降噪、增强和特征提取等处理。
例如,离散小波变换(DWT)可以用于去除信号中的高频噪声,数字滤波器可以滤除特定频率范围内的干扰,而相关分析则可以帮助提取传感器信号中的重要信息。
借助这些工具,传感器设计师能够提高信号的质量,提升测量结果的准确性。
三、传感器系统仿真在传感器设计的早期阶段,通过系统仿真来评估不同方案的性能,可以帮助设计师快速了解各种因素对传感器性能的影响,并选择最佳的设计方案。
Matlab技术提供了强大的系统仿真工具,例如Simulink仿真环境,可以方便地构建和模拟传感器系统的各个组成部分。
通过建立准确的传感器模型,并结合实际场景和条件进行仿真,我们可以预测传感器的性能、研究传感器的响应特性以及评估不同部件之间的相互影响。
基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇
基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇基于DSP的永磁同步电机矢量控制系统的研究与设计1基于DSP的永磁同步电机矢量控制系统的研究与设计随着现代电子技术的发展,控制技术逐渐成为重要的研究领域。
永磁同步电机作为一种高效、稳定的电机,已经得到广泛应用。
而矢量控制技术,则可实现对永磁同步电机的精确控制,提高其效率和稳定性。
本文,我们将介绍基于DSP的永磁同步电机矢量控制系统的研究和设计。
从系统架构、控制算法、硬件设计以及实验测试等方面,详细探究其原理和实现方法。
一、系统架构永磁同步电机矢量控制系统主要由两部分组成:控制器和电机。
其中,控制器采用DSP作为核心,运行矢量控制算法,将电机转速、位置等信息输入进行控制。
电机由永磁同步电机、驱动器和传感器组成。
二、矢量控制算法矢量控制算法主要包括两种:基于空间矢量分解的矢量控制和基于旋转矢量的矢量控制。
其中,基于空间矢量分解的矢量控制是通过将电机的空间矢量分解为定子和转子磁链矢量,控制其大小和相位差来实现永磁同步电机的转矩和转速控制;基于旋转矢量的矢量控制则是通过构建一个旋转矢量,并控制其与电机运动的相对位置来实现对电机的精确控制。
三、硬件设计在硬件设计方面,我们采用了一种小型化的设计方案,将DSP 与其他电路集成在一起,便于控制和维护。
电机驱动器采用了3相全桥逆变器,可实现对电机的相位和大小控制。
传感器为霍尔传感器,并通过反馈控制将电机转速等信息输入到控制器中。
四、实验测试为了验证所设计的永磁同步电机矢量控制系统的有效性,我们进行了实验测试。
通过转速和转矩测试,得到了电机在加速、减速、负载改变等情况下的运行特性。
实验结果表明,所设计的永磁同步电机矢量控制系统具有较高的控制精度和稳定性。
五、结论综上所述,基于DSP的永磁同步电机矢量控制系统的研究和设计可实现对永磁同步电机的精确控制,提高其效率和稳定性。
对于电机控制领域的研究和应用具有一定的参考和借鉴价值本文介绍了基于DSP的永磁同步电机矢量控制系统的研究和设计。
交流感应电动机矢量控制的matlab和DSP程序(精)
h_se = [0;0]; % [theta_r_se; wr_psi_r] p_se = [T; Rr; Lr; Lm; 200; 0.97; 0.03; fb];
% [T; Rr; Lr; Lm; fc; diff_max_limit; diff_min_limit; fb]
wr_hat_se = 0;
Rs = 1.723; %定子阻抗(ohm
1
Rr = 2.011; %转子阻抗(ohm
Ls = (7.387+159.232*1e-03; %定子电感(H
Lr = (9.732+159.232*1e-03; %转子电感(H
Lm = 159.232*1e-03; %励磁电感(H
P = 4; %磁极数
J = 0.001; %转子转动惯量(kg.m^2
%磁通估计器
h_fe = [0; 0; 0; 0; 0; 0; 0; 0];
% [theta_psi_r; psi_rD_i; psi_sd_v; % psi_sq_v; ui_sd; ui_sq; e_sd; e_sq] %转子励磁角度(pu
% [T; Rs; Rr; Ls; Lr; Lm; Kp; Ti; Ib; Vb] theta_psi_r = 0;
h_id = [0;0;0]; % h_pid = [up_reg3; ui_reg3; ud_reg3]
p_id = [T; 2*Ib/Vb; 0.001; 0.0001; 0.1; 0.71; -0.71]; % [T; Kp; Ti; Td; Kc; Umax; Umin];
% PID –速度控制
B = 0.0001; %阻尼系数(N.m.sec/rad
基于DSP的异步电机无速度传感器的矢量控制仿真毕业设计(论文)
本科生毕业设计设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究中国矿业大学毕业设计任务书毕业设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究毕业设计主要内容和要求:1.复习电力拖动自动控制系统课程,重点学习异步电机变压变频调速系统理论(包括异步电机动态数学模型和坐标变换技术、转子磁场定向矢量控制系统),了解国内外无传感器控制的现状及发展趋势;2.学习TMS320C2812DSP;3.学习观测器理论、模型参考自适应等相关理论;掌握异步电动机矢量控制的方法;4.完成异步电动机转子磁链估计模型的DSP实现;5. 采用Matlab/Simulink对转子磁场定向矢量控制系统进行仿真。
院长签字:指导教师签字:中国矿业大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩答辩情况提出问题回答问题正确基本正确有一般性错误有原则性错误没有回答答辩委员会评语及建议成绩:答辩委员会主任签字:年月日学院领导小组综合评定成绩:学院领导小组负责人:年月日摘要异步电动机的动态数学模型是一个高阶、非线性,强耦合的多变量系统。
采用坐标变换的方式将三相静止坐标系变为两相同步旋转坐标系,可以实现定子电流的解耦,从而实现磁通和转矩的解耦控制,达到直流电机的控制效果。
按转子磁链定向使交流调速系统的性能产生了质的飞跃。
无速度传感器控制解决问题的出发点是利用检测的定子电压、电流等容易检测到的物理量进行速度估计以取代速度传感器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术创新《微计算机信息》(嵌入式与SOC )2010年第26卷第1-2期360元/年邮局订阅号:82-946《现场总线技术应用200例》DSP 开发与应用MATLAB -DSP 在无传感器矢量控制中的应用Research on the Induction Motor Sensorless Vector -Control System using Matlab andDSP(北京工业大学)迟宁杨建武CHI Ning YANG Jian-wu摘要:本文介绍了一种采用MATLAB 及CCS 对异步电机无速度传感器交流调速系统进行调试的方法。
应用MATLAB 语言强大的分析能力和绘图功能,与DSP 高速运算的优势相结合,在自行搭建的无传感器矢量控制系统平台进行了调速实验,实验结果表明,采用Matlab 调试及直接目标代码生成的方法能避免传统计算机模拟的复杂编程过程,减少了工作量,有助于提高系统的综合效率,且能够保持系统良好的动静态调速控制性能。
关键词:Matlab;DSP;无速度传感器;矢量控制;CCS 中图分类号:TM306文献标识码:AAbstract:This paper introduce a method which could be used in debugging the induction motor sensorless vector -control system using MATLAB and CCS.Unify the MATLAB language formidable analysis ability and the cartography function,with the DSP ’s high speed operation superiority,and then carry out the modulation experiment on the sensorless vector control system platform.The exper -iment result indicate that,use the Matlab debugging and the direct goal code generated method can avoid the complex programming process in traditional simulation,reduced the work load,which is helpful in enhances the system's comprehensive efficiency.Key words:Matlab;CCS;Sensorless;Vector control;DSP文章编号:1008-0570(2010)01-2-0112-031引言Matlab 是一个强大的分析、计算和可视化工具,特别适用于控制系统的分析和模拟,但由于其依赖的平台是计算机及其CPU,因而由于CPU 系统功耗的原因,使得MATLAB 程序的执行速度相对于高速信号的输入/输出显得很慢,远不能满足实时信号处理的要求,而DSP 就其软件的编程能力而言,与单片机及计算机的CPU 的编程设计方法有类似之处,但DSP 比单片机的运算速度快得多,又比CPU 的功耗及设计复杂度低得多,但是其分析和可视化能力远不及Matlab,开发过程比较复杂。
不过,目前有一种新的技术,可以将DSP 和Matlab 两者密切结合起来,充分利用两者的特长,有力的促进控制系统的实现。
伺服驱动装置是印刷机无轴传动控制系统中重要的组成部分,国内大部分产品是采用带速度传感器的专用变频器调速,控制精度不高,而国外的产品价格又非常昂贵,由此,本文自行开发了一套基于PI 调节器的无速度传感器矢量控制系统,并且在自行搭建的实验平台进行了调速实验,在实验过程中,运用了Matlab 与DSP 混合编程的调试方法,实验结果表明,采用Matlab 调试及直接目标代码生成的方法能避免传统计算机模拟的复杂编程过程,减少了工作量,有助于提高系统的综合效率,且能够保持系统良好的动静态调速控制性能,很好地满足了印刷机无轴传动控制系统的要求。
2无速度传感器矢量控制系统介绍由于采用高性能的矢量控制方法且缺省了速度传感器,那么如何准确的获取转速信息,且保持伺服系统较高的控制精度,满足实时控制的要求,也就成为本课题研究的重要方向。
在这里我们采用PI 自适应控制方法,利用在同步轴系中q 轴电流的误差信号实现对电机速度的估算,整体结构如图1所示。
角速度给定值ω*与推算角速度反馈值ω的误差送入速度调节器,速度调节器的输出即为电磁转矩的给定值T e *,由i q1=L r T e /P m L m Фd2可以计算出电流的q 轴分量给定值i q1*,当q 轴电流没达到设定值时,可由R s 产生的q 轴电压和ω1σL s 产生的d 轴电压来调节。
因此,i q1*与定子电流q 轴分量的实际值i q1的误差信号送入PI 调节器调节器的输出u q1’为定子电流q 轴分量误差引起定子电压q 轴分量的调节量。
图1算法原理结构框图Fig.1Functional block diagram其中速度推算模块以不含有真实转速的转子磁链方程以迟宁:硕士研究生基金项目:基金申请人:杨建武;项目名称:数字化智能化印刷机械关键技术与装备;所属部分:印刷机数字化无轴传动关键技术研究———伺服装置的设计与改进;基金颁发部门:科技部科技支撑项目(2006BAF03B01)112--邮局订阅号:82-946360元/年技术创新DSP 开发与应用《PLC 技术应用200例》您的论文得到两院院士关注及坐标变换方程作为参考模型,以含有待辨识转速的PI 自适应律为可调模型,以定子电流转矩分量作为比较输出量,采用比例积分自适应律进行速度估计,经过PI 调节后,输出量就是待求的电机转速。
这种方法计算量小,结构简单,容易实现。
3Matlab 与DSP 混合编程的调试方法在传统的开发过程中,总是先用MATLAB 进行仿真。
当仿真结果满意时再把算法修改成C/C++语言,再在硬件的DSP 目标板上实现。
发现偏差,需要再用Matlab 对算法进行修正,再在DSP 上编写修正的算法程序。
如此过程反复进行,在DSP 的开发工具、Matlab 工作空间之间来回多次切换,非常不便,当系统比较复杂时,还需要分步验证各个中间结果和最终结果。
如果能够把Matlab 和DSP 集成开发环境CCS 及目标DSP 连接起来,利用Matlab 的分析能力来调试DSP 代码,那么操作TI DSP 的存储器或者寄存器就可以像操作Matlab 变量一样简单。
工具包Matlab Link for CCS Development Tools 的使用,可以使上述问题迎刃而解,利用此工具箱,在Matlab 环境下,就可以完成对CCS 的操作,即整个目标DSP 对于Matlab 像透明的一样,所有操作只利用Matlab 命令和对象来实现,简单、方便、快捷。
以下用调试上述无速度传感器矢量控制系统的例子来说明Matlab-DSP 集成开发环境在控制系统中的应用。
在Matlab 命令窗口中输入Simulink,打开Simulink 模块窗,建立异步电动机矢量控制变频调速系统的模型,如图2所示,结构简单明了,全部实现模块化,容易扩展,可以根据实际需要,改变每一模块的参数。
图2算法原理结构框图Fig2Functional block diagram图3CCSlink 把Matlab 和CCS 及目标DSP 连接在一起Fig 3Matlab,CCS and target DSP are connected by CCSlink 接下来设置仿真参数和Real-Time Workshop 选项,编译仿真模型。
并利用Matlab Link for CCS Development Tools 建立与目标DSP 的连接。
利用CCSLink 工具,可以把数据从CCS 中传送到Matlab 工作空间中,也可以把Matlab 中的数据传送到CCS 中,而且通过RTDX(实时数据交换技术),可以在Matlab 和实时运行的DSP 硬件之间建立连接,在它们之间实时传送数据而不使正在DSP 上运行的程序停止,这项功能可以在程序运行期间为我们提供一个观察DSP 实时运行状态的窗口,大大简化了调试工作。
Matlab 、CCSlink 、CCS 和硬件目标DSP 的关系如图3所示。
我们可以在Matlab 中修改一个参数或变量,并把修改值传递给正在运行的DSP,从而可以实时地调整或改变处理算法,并通过观察探针点数据来调试程序。
最后把CCSlink 和Embedded Target for C2000DSP Platform 相结合,可以直接由调试好的Simulink 模型生成DSP2812的可执行代码,并加载到DSP 目标板中,这样我们就可以在同一的Matlab 环境中完成系统算法的设计、仿真、调试、测试,并最终在DSP2812目标板上运行。
4系统调试实验台硬件结构如图4所示,变频器系统用DSP 作为运算控制单元,用IPM 模块作为功率电路交换单元,用霍尔电流传感器检测电机三相电的两相电流。
DSP 控制器在对检测到的电流信号进行相应的运算处理之后,将PI 控制算法产生的三对SVPWM 脉冲信号,作用于IPM 来驱动异步电机,通过改变输出脉冲信号的频率来实现异步电动机的变频调速。
图4系统整体结构框图Fig 4Functional block diagram for vector control system电机参数为:Rs=10Ω;Rr=5.6Ω;Ls =0.3119H;Lr=0.3119H;Lm =0.297H;P =4;J=0.001kg.m 2通过DSP 与CCS 的连接,可在Matlab 环境下对目标DSP 的存储器数据进行访问,再利用Matlab 强大的分析和可视化工具对其数据进行访问,也可以实现对工程的编译、链接、加载、运行,设置断点和探点,最后将满意的调试结果生成的目标代码直接加载到实验台上。
转速输入设定为一阶跃函数,电机带额定负载运行,获得的动态响应曲线如下图所示。
(a)d-q 轴电压电流波形113--技术创新《微计算机信息》(嵌入式与SOC )2010年第26卷第1-2期360元/年邮局订阅号:82-946《现场总线技术应用200例》DSP 开发与应用(b)磁通角波形(c)Matlab 转矩与DSP 转矩的比较(d)速度响应波形图5实验结果Figure5Experimental results由图5可见,d-q 轴电压电流及磁通角响应曲线平稳,在动态过程中,在Matlab 环境下的电机转矩和实际DSP 实验平台下的转矩曲线基本一致,系统响应快,且超调量小,只需0.6S 即可达到稳定。