微扑翼飞行器的仿生结构研究
仿蝴蝶微型扑翼机飞行原理及扑翼机构研究(已处理)

仿蝴蝶微型扑翼机飞行原理及扑翼机构研究摘要微扑翼飞行器Flapping-wing micro aerial vehicles模仿鸟类或昆虫的飞行原理,具有体积小、重量轻、隐身性好等优点,被广泛使用到军用和民用领域。
本文以仿蝴蝶微型扑翼机为研究对象,首先分析凤蝶的飞行参数,在此基础上,建立了仿蝴蝶扑翼机的参数化模型,研究了仿蝴蝶扑翼机的流体和扑翼机构的运动特性。
(1)对凤蝶的扑翼飞行和微观形态进行了整理和分析,获得了凤蝶扑翼飞行的尺寸参数及运动参数,为仿蝴蝶扑翼机的数值建模和机构分析提供了数据参考。
(2)以流体仿真软件 FLUENT 为平台,采用参数化语言,建立了仿蝴蝶流体分析模型,针对解决流场的动边界这一难点,采用动网格技术,对翼型的流体动力学性能进行研究。
流体仿真结果表明:涡流是产生高升力的主要原因;在大翼展、低频率扑动前提下,扑翼幅值与产生的升力和推力成正比。
(3)以平面四杆机构为基础,用解析法设计了具有急回特性的扑翼机构,并以 solidworks 软件为平台,建立了扑翼机构的三维模型,进行了扑翼机构的运动仿真,将仿真结果与解析法设计的扑翼机构的运动特性进行比较,验证了解析法设计急回特性的扑翼机构的可行性和可靠性。
关键词:微扑翼飞行器,流体力学仿真,动网格技术,急回特性,运动仿真IAbstractFlapping-wing micro aerial vehicles mimic birds or insect flight principle, hasthe advantage of small volume, light weight, good stealth ability, etc., is widely usedin military and civil fields. Papilio is chosen to research the flapping wing flight andflight mechanism in this paper. The parametric language is used to constructedbutterfly wing model to carry on motion analysis and the design of theflapping-wing mechanism1 Researched and analyzed the flapping wing flight and micro-morphology ofthe papilio, obtained its dimension parameter and motion parameter,provided datareferences for the numerical modeling and mechanical modeling of the bionicornithopter 2The imitating butterfly fluid simulation mode is based on theparameterized modeling method on FLUENT software platform, to solve the flowfield of the moving boundary this problem, using the dynamic mesh technique,research on hydrodynamic performance of airfoil. Fluid simulation results show:eddy current is the main cause of high lift; in the large span, the low frequency,flutter premise, flapping amplitude is proportional to lift and thrust s generated3Based on the analytical method design the plane four-bar linkage, usingquick-return characteristics to design flapping-wing mechanism, and make motionanalyses. Established the three-dimensional model of the flapping wing, and mademotion simulation on solidworks software. The research results revealthat theflapping-wing mechanism motion analysis which is compared withthree-dimensional model simulated analysis is feasible and reliable Keyword: Flapping-wing micro aerial vehicles, fluid dynamics simulation,dynamic mesh, quick-return characteristics, motion simulationII南昌航空大学硕士学位论文目录目录摘要 IAbstract II第1章绪论11.1 引言.11.2 微型扑翼飞行器的研究现状及分析21.2.1 国外研究现状..31.2.2 国内研究现状..51.3 本文的研究目的及意义..71.3.1 微型扑翼飞行器的研究目的..71.3.2 拟解决的技术问题71.4 本文的内容安排..8第2章昆虫扑翼飞行原理及蝴蝶翅形态结构92.1 昆虫扑翼飞行原理.92.1.1 雷诺数..92.1.2 昆虫的飞行机理..102.1.3 蝴蝶的飞行机理..132.2 蝴蝶翅形态结构142.2.1 蝴蝶翅气动外形特质142.2.2 蝴蝶翅三维形状测量152.2.3 自由飞行时蝴蝶翅形态结构16 2.3 蝴蝶翅微观形态172.3.1 翅的表观结构182.3.2 翅的断面结构192.4 本章小结19第3章仿生扑翼模型的流场分析21 3.1 FLUENT软件简介..213.1.1 FLUENT软件求解步骤..21III南昌航空大学硕士学位论文目录3.1.2 求解控制方程223.2 翼型的流场数值计算.233.2.1 翼型建模及网格化.233.2.2 翼型的流场计算..243.3 翅翼拍动中流场的数值模拟.27 3.3.1 动网格技术.273.3.2 动态数值分析283.3.3 拍打振幅对扑翼运动的影响313.4 本章小结32第4章扑翼机构设计及建模分析334.1 扑翼机构的设计.334.1.1 扑翼机构总体设计要求..334.1.2 扑翼的实现方案..344.2 扑翼机构的运动尺度综合..354.2.1 扑翼机构方案确定.364.2.2 构件尺寸确定374.3 按解析法设计急回特性的扑翼机构..374.3.1 扑翼机构设计374.3.2 扑翼机构分析424.4 扑翼机构建模.464.4.1 零件三维建模464.4.2 零件装配与运动仿真474.5 本章小结49第5章结论与展望505.1 结论..505.2 展望..50参考文献..52攻读硕士学位期间发表的学术论文及参加的科研情况.56一、攻读硕士学位期间发表的论文..56二、攻读硕士学位期间参加的科研情况56致谢57IV南昌航空大学硕士学位论文第一章绪论第 1 章绪论1.1 引言微型扑翼飞行器Flapping-wing micro aerial vehicles以其优良的机动性、低噪音、低成本、携带方便、操作简单、可执行多种任务等功能,不论在军用还是民[1]用领域都具有十分重要、极其广泛的用途。
微扑翼飞行器的仿生结构研究

微扑翼飞行器的仿生结构研究近年来,随着科学技术的不断发展,人们对于仿生学的研究越来越深入。
仿生学是模仿自然生物的形态结构、功能及行为特性,将其应用于解决人类问题的学科。
微扑翼飞行器的仿生结构研究正是仿生学在飞行领域的典型应用之一微扑翼飞行器是指通过翅膀的上下振动来产生升力,并通过对翅膀的控制来完成飞行任务的机器人。
其特点是体积小、质量轻、操纵灵活,可以在狭小的空间中进行灵活的操作,具有很大的应用潜力。
然而,由于微扑翼飞行器的工作原理和结构相对复杂,研究者们需要从仿生学的角度来理解和优化其结构。
在微扑翼飞行器的仿生结构研究中,研究者们主要关注以下几个方面的问题。
首先是翅膀的形态结构。
翅膀是微扑翼飞行器产生升力的关键部件,其形态结构直接影响飞行器的性能。
研究者们通过分析自然界中蝴蝶、蜻蜓等昆虫的翅膀结构,发现其具有独特的纹理和曲线形态,并据此设计出了一系列具有类似形态结构的翅膀。
这些翅膀的形态结构能够降低空气阻力、增加升力,并且能够在不同的工况下实现自适应变形,提高微扑翼飞行器的飞行性能。
其次是翅膀的材料选择。
为了实现仿生结构的设计,研究者们选择了一些具有特殊性能的材料。
例如,由于微扑翼飞行器的要求轻巧,研究者们选择了一些轻质的材料,如石墨烯材料,具有高强度和低密度的特点,使得微扑翼飞行器能够在有限的能量下完成飞行任务。
此外,研究者们还尝试使用可变刚度材料,通过改变翅膀的刚度来调整飞行器的飞行姿态和性能。
最后是翅膀的控制方法。
微扑翼飞行器的控制方法需要考虑多个自由度的问题。
研究者们通过分析昆虫翅膀的运动规律,发现其运动受到肌肉和神经系统的控制。
因此,研究者们提出了一种基于人工神经网络的控制方法,可以模拟昆虫的飞行控制机制,实现对微扑翼飞行器的高灵敏度控制。
综上所述,微扑翼飞行器的仿生结构研究是一项具有挑战性的任务,研究者们通过分析自然界中昆虫的翅膀结构和运动规律,设计出了一系列具有类似结构的翅膀,并开发了相应的控制方法。
微扑翼飞行器的仿生结构研究
文献标识码:A 文章编号:100l一3881(2007)6—001—3
Research on BioIIic Machim of FMAVs
ZHANG Mingwei,FANG Zongde。ZHOU Kai
(School of Mechanical and Electronic En舀neering,Northwestem Polytechnical University,Ⅺ’an 7 10072,China) Abst腿ct:The n印ping·wing micm air vehicle(FMAV)based on bionics is a son of new aircraft which imitates bird s.It h踮
仿生学的微扑翼飞行器(FMAV)的研究使人们正在 实现着人类航空史上最原始的梦想。微扑翼飞行器 (Fl印ping—wing Micm Air Vehicles,FMAV)是一种 模仿鸟类或昆虫飞行的新概念飞行器。仿生学和空气
度看,这种飞行是靠消耗鸟自身的能量来维持的。 鸟翼是适应飞行
的主要器官,鸟翼的 骨骼薄而轻,并有充
在正常飞行(相当于固定翼飞机的匀速平飞状 态)时,翅膀扑动的一个周期大致可以分成以下4 个阶段。①下拍阶段:充分伸展的翅膀从鸟的身体后 上方向下前方运动,在下拍的同时翅膀向前扭转,此 时翅膀基本保持平直,弯曲很小。②弯曲阶段:在最 低点翅膀有一个小停顿,翅膀外端向下折叠成一拱 形,弯曲较大,准备上提。③上提阶段:翅膀从最低 点开始上提,但只是肱骨部分抬起,腕关节只稍向后 扭转,仍保持低下位置,整个翅膀保持折叠成拱形, 羽毛逐渐张开。④展平阶段:肱骨几乎抬到最高点 时,前肢迅速抬起到“充分高”的部位,翅膀迅速 展平,然后重复开始第一阶段。在鸟类扑翼运动的下 拍与上提两个主要阶段,鸟翼的形状与使用的时间也 有不同,下扑段所用时间较多,展向弯度较小;上提 段所用时间较少,展向弯度较大。由于鸟类翅膀的挥 摆角度对气动力的影响较小,为简化分析及方便以后 的计算,忽略翅膀的挥摆运动,从下拍与上提两种主 要方式实现扑翼飞行。
仿生扑翼飞行器研究进展及现状概述
( ME MS ’0 0 ) ,Mi y a z a k i ,J a p a n,2 0 0 0 ( 1 ) :7 9 9 — 8 0 4 .
研制过程中的扑翼轨迹规划及驱动设计提供 客观依据 。
4 . 5 微 型扑 翼飞 行器 实现 智 能飞行 控 制
微型扑翼飞行器要实现智 能飞行 ,首先是对扑翼 飞行器 的 控制 ,微型扑翼 飞行 器在实 际飞行 过程 中会遇 到外力 的作用 ,
参
考
文
献
[ 1 ] 中昌富 ,姚磊 红 ,童 小燕 ,等. 仿鸽扑 翼飞行 的柔 性 变形研 究
例如阵风等于扰 ,这 时就需要有一定 的鲁棒性和抗干扰性 ,从 而保证 它能持续稳定 的飞行 ;其次微型扑翼 飞行器在飞行过程 中还得完成 一定 的姿态调整 ,例如平飞 、转弯 、侧飞 、俯仰甚 至 反转 等 ,要实现这 些姿态 ,就需要 控制系统来保 证。此外 , 微 型扑翼 飞行器在 飞行过程 中可能要执行一些任务 ,需要按照 预定 的轨迹航行 ,这就需要它具有一定 的自主导航能力 ;在飞
行过程 中也有可能会遇到一些障碍物 ,需要通过一定的避障措
[ J ] .机械制造, 2 0 1 4 ( 5 2 ) :3 7 — 4 0 .
[ 2 ] 李长龙.仿 生扑翼飞行器机构 的设计与研 究[ D] . 南京:南京航空
航 天大学,2 0 1 3 .
[ 3 ]顾明.微 型扑翼 飞行 器的研 究[ D] .合肥 :中国科 学技 术 大学 ,
2 0 1 3 .
《小型扑翼飞行器的结构设计及仿真分析》

《小型扑翼飞行器的结构设计及仿真分析》一、引言随着科技的不断发展,扑翼飞行器因其高效、灵活的飞行特点,在军事侦察、环境监测、生物仿生学等领域中受到了广泛的关注。
本文旨在探讨小型扑翼飞行器的结构设计及其仿真分析,为扑翼飞行器的设计与研发提供理论依据。
二、小型扑翼飞行器的结构设计(一)基本框架设计小型扑翼飞行器的结构主要由以下几个部分组成:框架、动力系统、驱动系统、飞行控制系统和扑翼机构。
其中,框架是整个飞行器的基础,负责支撑和固定其他部件。
(二)扑翼机构设计扑翼机构是扑翼飞行器的核心部分,其设计直接影响到飞行器的飞行性能。
扑翼机构主要包括翼片、连杆、驱动装置等。
翼片的设计要考虑到空气动力学特性,以提高飞行器的升力和稳定性。
连杆和驱动装置的设计要保证翼片的运动轨迹和速度,以实现高效的能量转换。
(三)动力系统与驱动系统设计动力系统通常采用电动或燃油发动机,为飞行器提供动力。
驱动系统则负责控制扑翼机构的运动,通常采用舵机或电机等。
在设计中,要考虑到动力系统的功率、重量、体积等因素,以及驱动系统的控制精度和可靠性。
(四)飞行控制系统设计飞行控制系统是扑翼飞行器的重要组成部分,负责控制飞行器的姿态和轨迹。
通常采用微处理器和传感器等设备实现控制。
在设计中,要考虑到控制系统的稳定性、响应速度和抗干扰能力等因素。
三、仿真分析(一)仿真模型的建立利用计算机仿真软件,建立小型扑翼飞行器的三维模型。
模型要尽可能地反映真实情况,包括各部件的尺寸、重量、材料等参数。
(二)仿真实验过程在仿真软件中,对模型进行动力学分析和运动学分析。
通过改变模型的参数,如翼片形状、连杆长度、驱动速度等,观察飞行器的飞行性能变化。
同时,还可以通过仿真实验分析飞行控制系统的控制效果和稳定性。
(三)仿真结果分析根据仿真实验的结果,分析各参数对飞行器性能的影响。
通过对比不同设计方案的仿真结果,选择最优的设计方案。
同时,还要对飞行控制系统的控制效果和稳定性进行分析,以提高飞行器的整体性能。
微型扑翼飞行机器人的设计方法和制造工艺研究
微型扑翼飞行机器人的设计方法和制造工艺研究随着科技的不断进步,微型扑翼飞行机器人作为一种仿生机器人的重要形式,正在得到越来越多的关注和研究。
本文将介绍微型扑翼飞行机器人的设计方法和制造工艺,以期为相关领域的研究提供参考和借鉴。
首先,微型扑翼飞行机器人的设计方法在于模仿自然界中的昆虫飞行原理。
昆虫的独特飞行方式具有高效性和灵活性,因此成为微型扑翼飞行机器人设计的重要依据。
设计者需要研究昆虫的翅膀结构和运动方式,并将其应用于机器人的设计中。
通过仿生设计,机器人可以具备更好的飞行性能和机动性。
其次,微型扑翼飞行机器人的制造工艺需要兼顾材料选择和加工工艺。
首先,材料的轻量化和柔韧性是制造微型机器人的关键。
常用的材料包括碳纤维、聚合物材料等,这些材料具有较好的强度和韧性,同时又能保持机器人的轻盈和灵活。
其次,制造工艺需要满足微型机器人的复杂形态和运动需求。
采用微纳加工技术,如激光切割和3D打印等,可以实现微型机器人零件的精确制造和组装。
此外,为了实现机器人的高效飞行,还需要通过优化机翼和机体结构,提高机器人的空气动力学性能。
最后,微型扑翼飞行机器人的设计方法和制造工艺研究面临一些挑战。
首先,微型机器人的能源供应是一个重要问题。
由于体积限制,传统能源系统难以满足机器人的长时间飞行需求,因此需要研究新型的微型能源系统。
其次,机器人的控制系统也是一个挑战。
微型机器人的飞行姿态需要实时调整和控制,因此需要设计高精度和高稳定性的控制系统。
综上所述,微型扑翼飞行机器人的设计方法和制造工艺研究是一个复杂而又具有挑战性的领域。
通过模仿昆虫的飞行原理、选择合适的材料和加工工艺,并解决能源和控制系统等问题,可以为微型扑翼飞行机器人的发展提供指导和支持。
未来,随着科技的不断进步,微型扑翼飞行机器人有望在军事、救援和勘探等领域发挥更大的作用。
仿生扑翼机器人的机械系统设计研究
仿生扑翼机器人的机械系统设计研究近年来,仿生机器人技术迅猛发展,其潜在的应用领域不断扩大。
其中,仿生扑翼机器人作为一种模拟昆虫翅膀运动的机器人,具有较高的机动性和适应性,在无人侦查、救援和农业等领域有着广阔的前景。
本文将着重研究仿生扑翼机器人的机械系统设计。
首先,机械系统设计是仿生扑翼机器人实现扑翼运动的关键。
为了模拟昆虫翅膀的运动特点,机械系统应具备轻量化、高刚度和高可靠性的特点。
一种常见的设计方法是采用柔性材料制作翅膀,如碳纤维复合材料,以实现翅膀的轻量化和高刚度。
同时,采用特殊的结构设计,如曲线状的翅膀弯曲轴,可以使机械系统具备较好的可靠性和机动性。
其次,机械系统设计还需考虑扑翼机构与驱动系统的协同工作。
在仿生扑翼机器人中,扑翼机构通常采用类似昆虫的并联结构,通过多个关节和连杆实现翅膀的运动。
为了实现高效的扑翼运动,机械系统设计需要考虑关节的精确控制和连杆的合理长度。
同时,驱动系统需要提供足够的力和速度,以实现扑翼机构的正常工作。
电机、液压或气动系统都可以作为驱动系统的选择,不同的驱动方式会对机械系统的设计提出不同的要求。
最后,机械系统设计还需考虑机器人的稳定性和控制性能。
由于仿生扑翼机器人在空气中运动,存在空气动力学效应的影响,机械系统设计需要考虑机器人的稳定性。
通过调整翅膀的形状和尺寸,以及控制翅膀的运动轨迹,可以提高机器人的稳定性。
此外,机械系统设计还需要与控制系统紧密结合,通过传感器和反馈控制实现对机器人的精确控制。
综上所述,仿生扑翼机器人的机械系统设计是实现扑翼运动的关键。
通过采用轻量化、高刚度和高可靠性的材料,设计合理的扑翼机构和驱动系统,以及考虑机器人的稳定性和控制性能,可以实现高效、稳定的扑翼运动。
随着技术的不断发展,仿生扑翼机器人的机械系统设计将进一步提升,为各个领域的应用带来更多可能性。
仿生扑翼飞行器的研究现状及关键技术
1. 引言自古以来,人们就梦想着在天空自由翱翔,对鸟在滑翔状态下的研究使人类乘着飞机上了天。
但在一般情况下,昆虫和鸟类翅膀具有很大的机动灵活性,生物超强的飞行能力也引起了人们的极大兴趣,如昆虫利用其薄如蝉翼的翅膀高频振动,能够实现前飞、倒飞、侧飞及倒着降落等特技飞行。
对生物生理结构和飞行机理的研究为仿制出具有更大飞行灵活性的新型扑翼飞行器打下坚实基础。
随着对生物飞行机理的认识和微电子机械技术(MEMS)、空气动力学和新型材料等的快速发展,仿生扑翼飞行器在目前已成为一个新的研究热点。
由于其在军事和民用上均具有广泛的应用前景,许多国家都已在这方面进行了研究,如美国加州大学伯克利分校、日本东京大学等都已经在这个领域进行了深入的研究探索工作,国内的科学家们也开始了这方面的基础和应用研究工作。
本文主要介绍了仿生扑翼飞行器的特点和关键技术,以及其在国内外的研究现状,并进行了对比分析思考,提出了相应的见解。
1. 仿生扑翼飞行器的特点仿生扑翼飞行器是一种模仿鸟类和昆虫飞行,基于仿生学原理设计制造的新型飞行机器。
该类飞行器若研制成功,那么与固定翼和旋翼飞行相比,它便具有独特的优点:如原地或小场地起飞,极好的飞行机动性和空中悬停性能以及飞行费用低廉,仿生扑翼飞行器的研究现状及关键技术o 周骥平 武立新 朱兴龙扬州大学机械工程学院[摘 要] 本文简要介绍了仿生扑翼飞行器的概念、特点及其应用,概述了仿生扑翼飞行器在国内外早期和当前的研究现状及未来的发展趋势。
在此基础上,就目前研究中迫切需要解决的一些关键技术进行了讨论,并结合目前研究情况,对我国仿生扑翼飞行器的未来发展前景进行了展望。
[关键词] 仿生;扑翼飞行器;微型飞行器;关键技术[Abstract] The concept, characteristics and usage of flapping-wing air vehicle (FAV) are brieflyintroduced. The present research situation and future development trend of FAV are summarized.According to these, several key technologies of FAV are discussed. Taking into account the presentsituation , the future on the research of FAV in China is outlined.[Keywords] Bionics; Flapping-wing air vehicle; Micro air vehicle; Key technology[作者简介]周骥平(1960-),男,扬州大学机械工程学院院长,博士,教授,研究领域: 机电一体化,机械设计理论与方法等.*基金项目:江苏省高校自然科学基金项目资助(02KJD460010)综述2004.6它将举升、悬停和推进功能集于一扑翼系统,可以用很小的能量进行长距离飞行,因此更适合在长时间无能源补充及远距离条件下执行任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
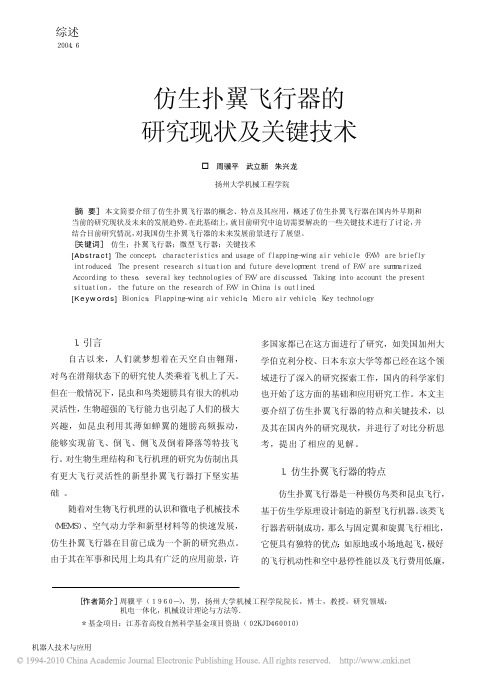
图2鸟类翅翼结构
面:手骨(腕骨、掌骨和指骨)简化而并合,前肢
+基金项目:国家自然科学基金(50575183);博士点专项科研基金(20050699022)
万方数据
·2·
机床与液压
第35卷
仅能在一个平面上作折翅和张翅的关节运动,因而有 利于在胸肌支配下形成一个有力的抗击空气的整体。 翅上着生的羽毛是翼的重要组成部分,其中在手骨上 着生的称为初级飞羽,在前臂上着生的称为次级飞 羽,它们在扇动翅膀时产生的力不同。此外,在鸟翼 的翼角(腕部)生有一小簇羽毛成为小翼羽,也对 控制飞行起重要作用,每一支飞羽都由羽轴和羽片构 成,羽轴的基部深入皮肤内,羽片由羽轴两侧平行伸 出的很多羽枝构成。每一羽枝两侧密生成排的羽小 枝,上有钩突,彼此钩连,因而构成坚韧而富有弹性 的羽片。飞翔的结构对鸟类飞行的适应还表现在每一 羽的外羽片狭窄,内羽片宽阔,各羽从外向内依次覆 盖。羽轴在气流作用下还略有旋转能力,因而当鸟类 扑翼飞行时飞羽之间随扬翅而出现裂隙便于空气通 过,而在翅膀下拍时各羽联合成严实的翼面以获得最 大的动量。整个鸟翼的背部为弧面,空气流过时能产 生大的升阻比,有利于飞翔。
本文从仿生学的角度分析微扑翼飞行器的机翼及 驱动机构的设计,以期能够找到最佳设计方案,实现 可持续扑翼飞行。 1 鸟类的飞行机理及其生物学构造
扑翼飞行是鸟类靠自身体力和特殊生理构造实现
行(如图1)。 如今人们正朝着这一梦想在不断努力探索。基于
的一种较复杂的动力飞行。所需空气动力主要来自于 往复扑源自的翅膀与周围空气间的相互作用。从能量角
Keywords: FMAVs;Bionics; Driving machine
0 引言
由于其体积小、重量轻、成本低、隐身性和可操作性
自然界的鸟类有令人
叹为观止的飞行能力,自
古以来人们就渴望象鸟儿
那样翱翔蓝天。古今中外
人们一直不停地在进行这
方面的探索,西汉时期
《鸿书》记载“公输般 (鲁班)制木鸢以窥宋
仿生学的微扑翼飞行器(FMAV)的研究使人们正在 实现着人类航空史上最原始的梦想。微扑翼飞行器 (Fl印ping—wing Micm Air Vehicles,FMAV)是一种 模仿鸟类或昆虫飞行的新概念飞行器。仿生学和空气
度看,这种飞行是靠消耗鸟自身的能量来维持的。 鸟翼是适应飞行
的主要器官,鸟翼的 骨骼薄而轻,并有充
行器的动力问题是研究的一个瓶颈,因此高效节能的
微扑翼传动机构设计具有很重要的意义。
驱动机构的设计原则是: ①能实现预定的运动规律;② 尽可能简单轻巧,即满足需要 的情况下,重量和尺寸越小越 好;③运动高效可靠,即运动 机构的效率要高,能量消耗要 少,且在高频的扑翼运动下机 构不会失效。在研究过程中提 出了几种驱动机构的模型:曲 柄滑块机构、凸轮弹簧机构、
选定仿生驱
H。蹴,f动机构模型 {多
|I自主开发 且扑翼软件 计算扑翼角度及 其它参数 {-
一ADAMs运动仿真
U
I试制样机I
平面连杆机构、空间连杆机构、 图3仿生驱动机构
弹性支撑机构。综合比较各种
设计流程图
机构的特点,选用扑翼运动实
现形式简单,效率高、重量轻、容易微小化的平面连
杆机构。
在选定了驱动机构模
行机理的分析,进行机翼和驱动机构的仿生学设计,提出了一种高效节能的驱动机构,并制作了翼展300mm微扑翼飞行器
样机。试飞结果表明,该飞行器可进行姿态良好的飞行,可持续飞行lO~20s,其结构具有一定的实用价值及应用前景,
为微扑翼飞行器的进一步微型化打下基础。
关键词:微扑翼飞行器;仿生学;驱动机构
中图分类号:TP242
复杂而不予采用。平直型机翼实际制作中以聚酯薄膜
为蒙皮,机翼可看做是刚性的,只要控制好扑翼频
率、扭转角和扑翼幅值的大小及其相互关系就可以实
现样机的扑翼飞行。在低湍流度风洞实验和试飞过程
中此种机翼一直表现良好。
2.2驱动机构
扑翼飞行主要是靠消耗鸟的自身能量来维持的,
如何提供足够的动力是一个难题。动力源可以利用太
鸟翼是一种轻巧的可变翼,它既有飞机机翼那样 的飞行表面,又有初级飞羽向下、向前扇击而有推进 器的功能,借不断改变翼的形状和大小(负载面积) 以及翼与躯体间的相对位置而适应各种飞行条件下空 气动力学的需要。鸟类的尾翼宽而坚韧,在飞行中起 舵的作用,有助于着陆、转身和减速。各飞羽末端之 间的裂隙和气流作用下的弹性变形,也能使气流趋于 平缓,鸟类飞行的翼梢涡流可产生阻力,增加翼的长 度可以减少这种涡流,能分隔开翼端的涡流干扰,因 此长而狭的翼比短而宽的翼在飞行中更有效,但机动 性差。展弦比大的升阻力值也高。善于翱翔的大型海 鸟信天翁展弦比为25,海鸥和雨燕为11,乌鸦为6, 麻雀为5。翼负载(体重与翼面积之比值)对鸟类飞 行也有重要作用,快速飞行的鸟类大多具有较小的翼 和较快的扇翅频率,而翼面积较大的鸟类则能较缓慢 地扑翼飞行,这是因为升力和阻力都与翼面积和速度 平方的乘积成正比,所以大型鸟类一般翼负载较大, 例如天鹅为200Pa,野鸭为100Pa,乌鸦为30Pa。因 此在设计机翼及驱动机构时要考虑选择与扑翼飞机大 小相适应的鸟类,来提高仿生学设计的效率。 2机翼和驱动机构的仿生设计
表l 几种微扑翼飞行器机翼
陟 qp
ff
/\入
遥鞫匪
f仿蝙蝠l
平直型机翼 带翼型机翼 折叠型机翼 开孔型机翼 平直型机翼由于设计制作简单,因而在我们实际
研制过程中得到较多的应用,其它几种机翼虽然在运
万方数据
第6期
张明伟等:微扑翼飞行器的仿生结构研究
·3·
动形式J:更有鸟类的因素,但是由于噪声大,制作
在设计仿生机翼时通过控制正、负扑翼角(例 如+30.7。,一38.9。)的相对大小来模仿鸟翼的上提 和下拍,然后在使机翼有一个固定的仰角以使扑翼机 产生升力和阻力。对于鸟类骨骼充气轻盈现象,在机 翼骨架设计中采用不同规格的碳纤维;布局上采用辐 射状,可增加机翼的刚度,同时节省材料。
微扑翼飞行器机翼的形状、布局形式和材料对飞 行效果都有很大影响,此外机翼是柔性或是刚性对飞 行也有影响。通过总结多次试飞情况,发现机翼的制 造工艺对飞行的成功具有决定性的影响。在机翼仿生 研究中设计了几种不同的翼:平直型机翼,带翼型机 翼,折叠型机翼,开孑L型机翼。
动力学研究均表明,对于特征尺寸相当于鸟或者昆虫 的微型飞行器来说,扑翼飞行要优于固定翼和旋翼飞 行器。微扑翼飞行器的主要特点是将举升、悬停和推 进功能集于一个扑翼系统,可以用很小的能量进行长 距离飞行,同时,具有较强的机动性。微扑翼飞行器
气现象,很多骨骼为
适应飞行生活而合并
或消失(如图2)。
特别表现在前肢方
微扑翼飞行器的结构仿生,是模仿鸟类的形态、 结构和控制原理,从而设计制造出的功能更集中、效 率更高并具有生物特征的机械。但是在进行仿生设计 的过程中要克服一些思维定式,不能只限于形体上的 单纯模仿,要以产生类似鸟类扑翼的运动效果为目 的。在多自由度的协调配合下,鸟类肌肉在瞬间运动 下发出很大的力量,比人类制造的任何机器都完美得 多。要想达到鸟类的飞行水平除了不断的研究飞行机 理,还要另辟蹊径,并注意鸟类的肌肉与转动的微型
文献标识码:A 文章编号:100l一3881(2007)6—001—3
Research on BioIIic Machim of FMAVs
ZHANG Mingwei,FANG Zongde。ZHOU Kai
(School of Mechanical and Electronic En舀neering,Northwestem Polytechnical University,Ⅺ’an 7 10072,China) Abst腿ct:The n印ping·wing micm air vehicle(FMAV)based on bionics is a son of new aircraft which imitates bird s.It h踮
阳能阵列、内燃机或电池,也有静电驱动或压电驱动
方面的研究。目前比较成熟的技术是利用电池加微电
机,微型且型号多,便于开展实际试飞。但是仍有一
定的局限性,动力不足一直是个问题,根据电机的破
坏性实验,5min是一个警戒线,电池(锂镍电池,
型号041730 160mAh)电压迅速下降,电机灼热,以
致不能扑动,实验是固定扑翼飞机在地面上做,共做
在正常飞行(相当于固定翼飞机的匀速平飞状 态)时,翅膀扑动的一个周期大致可以分成以下4 个阶段。①下拍阶段:充分伸展的翅膀从鸟的身体后 上方向下前方运动,在下拍的同时翅膀向前扭转,此 时翅膀基本保持平直,弯曲很小。②弯曲阶段:在最 低点翅膀有一个小停顿,翅膀外端向下折叠成一拱 形,弯曲较大,准备上提。③上提阶段:翅膀从最低 点开始上提,但只是肱骨部分抬起,腕关节只稍向后 扭转,仍保持低下位置,整个翅膀保持折叠成拱形, 羽毛逐渐张开。④展平阶段:肱骨几乎抬到最高点 时,前肢迅速抬起到“充分高”的部位,翅膀迅速 展平,然后重复开始第一阶段。在鸟类扑翼运动的下 拍与上提两个主要阶段,鸟翼的形状与使用的时间也 有不同,下扑段所用时间较多,展向弯度较小;上提 段所用时间较少,展向弯度较大。由于鸟类翅膀的挥 摆角度对气动力的影响较小,为简化分析及方便以后 的计算,忽略翅膀的挥摆运动,从下拍与上提两种主 要方式实现扑翼飞行。
电机运动方式的区别。 2.1机翼结构设计
设计和制造具有非定常空7 e动力学特性的高效仿 鸟翅翼,是仿鸟微扑翼飞行器研究中富于挑战性的一 个研究难题。机翼结构是影响鸟类飞行很关键的一个 因素,不同的机翼结构决定了不同的扑翼运动方式。 研究发现,翅膀在飞行过程中有4种基本的运动方 式:扑动、扭转、挥摆、折叠。
图1达芬奇设计的扑 翼机复原模型
城”,王莽时代曾有人用鸟类羽毛试验过“飞人”,
东汉时代的科学家张衡也曾制作过木鸟,晋朝的葛洪