反电动势过零点的检测方法
基于CPLD的反电势过零检测电路设计与应用

萋嚣
20
^Ⅸf.mm’1)
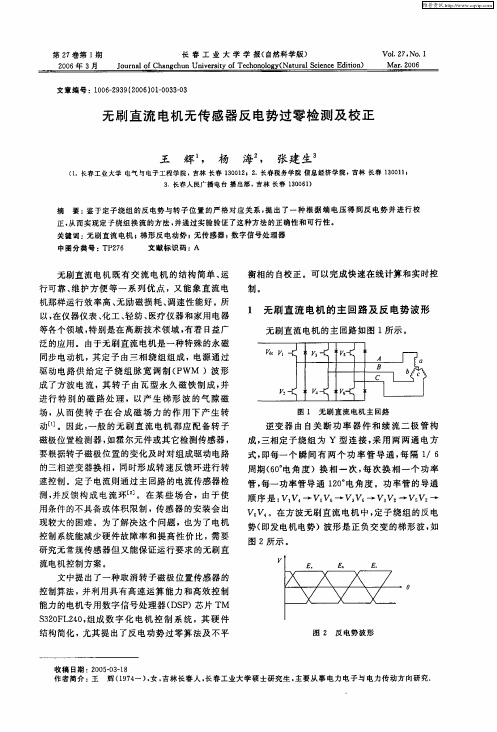
n为电机转速。这样电机转速就正比于瓦在20瑚
图8效率特性曲线
内的计数值Co。NT;最后制作出与反电势相移角理、 就可达到70%以上,而转速到34 000 r/rain后就可
相位补偿角度p=30。一a、正比于电机实时转速的 以保持在80%以上。对于牙钻电机,25 000 r/min
这样三相信号只要有一相发生变化,在软件中就会
图8是负载转矩固定为80 g·cm时电机的效
产生响应;然后将一计数器%设为每20 ms输出计 数值一次,%的计数值就是在20 m8内|s。发生变化 的次数,记为:
.
n
1
.
n
LOUNT 2 6~0×丽×3 2—1 0—00
率特性曲线。电机效率在转速到25 000 r/min以后
幼驱动搀制, :~…c-已二一,‘留;知矗∥胡岛惕占‘2口’≠一………~…………………-.-………………………………饭……持…电j…棚…………2…0l…o年 …-第一4:期…-.
基于CPLD的反电势过零检测电路设计与应用
胡 类,刘卫国,韩英桃,王燕娜
(西北工业大学,陕西西安710072)
摘要:设计医疗牙钻用无位置传感器无刷直流电动机反电势过零点检测的硬件电路。详细分析反电势经过 滤波后所产生的相移,并提出一种基于CPLD的软件补偿方法。通过实验,证明该电路检测到的反电势过零点信号 有效、可靠,并且相移补偿方法正确、可行。
从图9d中,可以清楚地看到反电势检测波形 (矩形波)滞后A相绕组反电势波形(正弦波)小于 300申角摩.为150申角度。
较理想。
4实验结果
;
;
实验样机为稀土永磁无位置传感器无刷直流电
第1章BLDCM

工作原理
转子每转过60o,逆变器开关管换流一次、定子磁状 o图示位置→ 磁极转过 60 磁极图示位置 → 位置信号 态改变一次,电机有6个磁状态,三相各导通120o— 位置信号→逻辑变换 → 逻辑变换 → V1 、 V6 开通 —两相导通三相六状态 →V1、V2 开通→ A、C → A、B相导通→I:E+-AO跳跃旋转 转子磁场顺时针连续旋转、定子磁场隔 60 相导通→I: E+-A-C-EB-E- →电机顺时针旋转 →电机顺时针旋转 ——自同步电机
磁敏式 光电式 电磁式 接近开关式 正余弦变压器 编码器
位 置 检 测 器
无位 置传 感器 检测
反电动势检测
续流二极管工作状态检测
定子三次谐波检测
瞬时电压方程法
特种电机及其控制
20
4. 控制器
模拟 控制 系统
分立元件加少量集 成电路构成的模拟 控制系统
控 制 器
数字 控制 系统
基于专用集成电路 的控制系统 数模混合控制系统
忽略电枢绕组的电感。这样,无刷直流电动机的电压方程 可以简化为:
US 2UT E 2rI a
式中 UT——开关器件的管压降;
Ia ——电枢电流;
E ——线电动势,即电机的反电动势。
特种电机及其控制
47
对于三相六状态无刷直流电动机,任一时刻都有两相绕 组导通,故电机的反电动势为
A Y Z
Fad S N
Faq Fa
B C X II Fr I
如图所示,电枢 磁动势的直轴分 量Fad对转子主磁 极产生最大去磁 作用
特种电机及其控制
36
A Y S Z
Fa Faq
C
N
Fad X
无刷直流电机反电势过零法无传感器控制

无刷直流电机反电势过零法无传感器控制
郝玲玲;瞿成明;戴俊
【期刊名称】《重庆工商大学学报(自然科学版)》
【年(卷),期】2014(031)007
【摘要】针对无位置传感器控制的无刷直流电机转子位置检测,文章提出了一种基于反电势过零点检测转子位置的方法;通过分析计算无刷直流电机的数学模型,检测不导通相的端电压并与直流母线中点电压相比较,得到反电势过零点信号.该方法不需要虚构电机中点和低通滤波电路以及分压电路,但需要在特定PWM调制方式下得到反电动势过零点再延迟30°电角度实现换相;通过MATLAB/SIMULINK仿真实验结果表明,该方法合理、有效地检测转子位置;相对于传统的反电势过零虚构中点检测方法,该方法具有结构简单、适用范围广等优点.
【总页数】7页(P56-62)
【作者】郝玲玲;瞿成明;戴俊
【作者单位】安徽工程大学电气工程学院,安徽芜湖241000;安徽工程大学电气工程学院,安徽芜湖241000;安徽工程大学电气工程学院,安徽芜湖241000
【正文语种】中文
【中图分类】TM301
【相关文献】
1.无刷直流电机无传感器反电势过零检测及校正 [J], 王辉;杨海;张建生
2.反电势逻辑电平积分比较法实现的无刷直流电机无位置传感器控制 [J], 周波;魏
佳;穆新华;严仰光
3.无刷直流电机反电势过零点检测转子位置研究 [J], 杨光;李醒飞
4.一种"反电势法"永磁无刷直流电机控制器设计 [J], 王磊;莫鸿强;王剑;田联房
5.无刷直流电机反电势过零检测新方法 [J], 朱俊杰;粟梅;陈程;杨龙
因版权原因,仅展示原文概要,查看原文内容请购买。
基于反电动势过零检测法的无刷直流电机控制原理

基于反电动势过零检测法的无刷直流电机控制原理【电火花四溅,电机不转了?】哎呀妈呀,咱们的无刷直流电机可真是个“小精灵”,有时候它跳起舞来比跳舞还轻盈,但一旦闹脾气,那可就麻烦大了。
今天咱们就来聊聊这个“小精灵”的脾气——反电动势过零检测法,保证让你轻松上手,不再被这小家伙气到翻白眼。
首先得知道,无刷直流电机就像是个调皮的小精灵,它自己能发电,还能把电能储存起来。
但是啊,这个小精灵有个坏习惯,就是它喜欢在关键时刻“罢工”,这时候怎么办呢?别急,有了反电动势过零检测法,咱们就能轻松应对啦!想象一下,你正在玩捉迷藏,突然一个小伙伴不见了,你四处找了一圈,终于在一个角落找到了他。
这时候,你心里是不是乐开了花?对,这就是无刷直流电机遇到问题时的状态。
但是呢,如果你能提前发现这个问题,是不是就能避免一场大混乱?没错,反电动势过零检测法就是这么神奇。
它就像是个小精灵的“保镖”,时刻盯着它的一举一动,一旦发现不对劲,立马报警,让你知道“小精灵”要罢工了。
那么,这个“保镖”是怎么工作的呢?简单来说,就是通过监测反电动势的变化来判断电机是否正常运行。
如果反电动势突然变得很低或者很高,那就说明电机可能出了问题,这时候就得赶紧找人来看看,别让“小精灵”继续闹腾下去了。
当然了,要想让这个“保镖”工作得风生水起,还得给它一些“装备”。
比如说,我们可以通过调整控制器的参数来优化“保镖”的性能,让它更加敏锐、准确。
这样一来,就算“小精灵”偶尔闹点小脾气,也不怕了。
说到这里,你是不是已经迫不及待想试试这个“反电动势过零检测法”了呢?别急,咱们先从简单的开始。
比如,你可以试着用一个简单的电阻来模拟“反电动势”,看看“保镖”能不能发现这个“小精灵”的“异常”。
当然啦,实际操作的时候,还得根据具体的电机型号和参数来调整哦。
好了,以上就是关于无刷直流电机控制原理的一些简单介绍。
希望这篇“小文章”能让你对“小精灵”有更深入的了解,也能帮助你更好地解决实际问题。
无刷直流电机无传感器反电势过零检测及校正
作 者 简 介 :王Fra bibliotek辉(94 )女 . 17 一 . 吉林 长春 人 , 春工 业 大 学 硕 士 研 究 生 . 要 从 事 电 力 电 子 与 电力 传 动 方 向 研 究 . 长 主
维普资讯
3 4
长 春 工 业 大 学 学 报( 自然 科学 版)
第2 7卷
2 反 电势 与 端 电 压 关 系
一
不 对 称 和 终 端 电 压 测 量 电 阻 桥 的 不 对 称 而 产 生 , 同的应 用 场合 这种 不平 衡 会不 同 , 以被 不 可 近似认 为是 机械 速 度 的一 种 线性 功能 。这 种不平 衡 会给 反 电动势 检 测 结 果 带 来 很 大 的误 差 , 为解
! 璺! 堡 !
曼 旦 呈 旦一
文 章 编号 :10 —9 9 20 ) 10 3—3 0 62 3 (0 6 O—0 30
无刷 直 流 电机 无传 感 器反 电势 过零 检 测及 校 正
王 辉 杨 海 张建 生。 , ,
( . 春 工 业 大 学 电气 与 电子 工 程 学 院 ,吉林 长春 10 1 l2 1长 30 2 .长 春税 务 学 院 信 息 经 济 学 院 , 林 长 春 10 1 l 吉 30 1
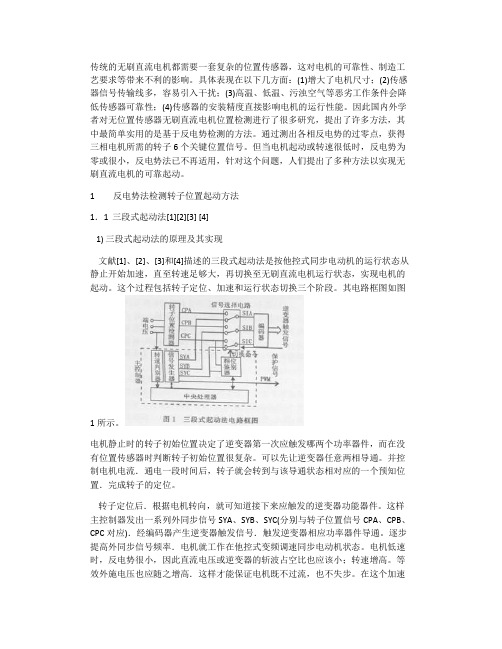
动[ 。因此 , 1 ] 一般 的无 刷 直 流 电机 都 应 配 备 转 子
’ 。 - — f Jj ’’ l l 。。— I JC 。 一
l
:
: 【 : _l
L
图 1 无 刷 直 流 电机 主 回路
逆 变器 由 白关 断 功 率 器 件 和 续 流 二 极 管 构 成, 三相定 子 绕 组 为 Y 型 连 接 , 用 两 两 通 电 方 采
反电动势检测原理
传统的无刷直流电机都需要一套复杂的位置传感器,这对电机的可靠性、制造工艺要求等带来不利的影响。
具体表现在以下几方面:(1)增大了电机尺寸;(2)传感器信号传输线多,容易引入干扰;(3)高温、低温、污浊空气等恶劣工作条件会降低传感器可靠性;(4)传感器的安装精度直接影响电机的运行性能。
因此国内外学者对无位置传感器无刷直流电机位置检测进行了很多研究,提出了许多方法,其中最简单实用的是基于反电势检测的方法。
通过测出各相反电势的过零点,获得三相电机所需的转子6个关键位置信号。
但当电机起动或转速很低时,反电势为零或很小,反电势法已不再适用,针对这个问题,人们提出了多种方法以实现无刷直流电机的可靠起动。
1 反电势法检测转子位置起动方法1.1 三段式起动法[1][2][3] [4]1) 三段式起动法的原理及其实现文献[1]、[2]、[3]和[4]描述的三段式起动法是按他控式同步电动机的运行状态从静止开始加速,直至转速足够大,再切换至无刷直流电机运行状态,实现电机的起动。
这个过程包括转子定位、加速和运行状态切换三个阶段。
其电路框图如图1所示。
电机静止时的转子初始位置决定了逆变器第一次应触发哪两个功率器件,而在没有位置传感器时判断转子初始位置很复杂。
可以先让逆变器任意两相导通。
并控制电机电流.通电一段时间后,转子就会转到与该导通状态相对应的一个预知位置.完成转子的定位。
转子定位后.根据电机转向,就可知道接下来应触发的逆变器功能器件。
这样主控制器发出一系列外同步信号SYA、SYB、SYC(分别与转子位置信号CPA、CPB、CPC对应).经编码器产生逆变器触发信号.触发逆变器相应功率器件导通。
逐步提高外同步信号频率.电机就工作在他控式变频调速同步电动机状态。
电机低速时,反电势很小,因此直流电压或逆变器的斩波占空比也应该小;转速增高。
等效外施电压也应随之增高.这样才能保证电机既不过流,也不失步。
在这个加速过程中,由于他控式变频调速同步电动机运行不稳定。
反电势过零检测新方法的尝试

反电势过零检测新方法的尝试
姚常青
【期刊名称】《国外电子测量技术》
【年(卷),期】2012(31)11
【摘要】为了研究无刷直流电机的反电势过零检问题,采用无刷直流电机专用芯片TMS320LF24x,探究了反电势过零检测模式,对电路则进行了重新设计,电流瞬时值比较则采用控制滞环电流控制模式,限制最大电流的变化。
实验结果表明,改进的测量新方法可以较为理想解决反电势的过零检测难点问题,实验证明检测是有效的,也有一定的实用价值。
【总页数】5页(P48-52)
【关键词】反电势过零检测;无刷直流电动机;TMS320LF24x
【作者】姚常青
【作者单位】陕西工业职业技术学院
【正文语种】中文
【中图分类】TM33
【相关文献】
1.无刷直流电机反电势过零点检测转子位置研究 [J], 杨光;李醒飞
2.基于CPLD的反电势过零检测电路设计与应用 [J], 胡;刘卫国;韩英桃;王燕娜
3.一种基于反电势的永磁同步电机转子位置检测新方法 [J], 王少坤
4.无刷直流电机反电势过零检测新方法 [J], 朱俊杰;粟梅;陈程;杨龙
5.反电势过零检测新方法 [J], 姚常青
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
反电动势过零点的检测方法
一般的永磁无刷直流电机是由三相逆变桥来驱动的,根据转子位置的不同,为了产生最大的平均转矩,在一个电角度周期中,具有6个换相状态。
在任意一个时间段中,电机三相中都只有两相导通,每相的导通时间间隔为120°电角度。
例如,当A相和B相已经持续60°电角度时,C相不导通。
这个换相状态将持续60°电角度,而从B相不导通,到C相开始导通的过程,称为换相。
换相的时刻取决于转子的位置,也可以通过判断不导通相过零点的时刻来决定。
通过判断不导通相反电动势过零点,是最为常用也最为适合的无位置传感器控制方法。
广告插播信息
维库最新热卖芯片:IPS022G FZT953TA LT1108CN8MC74LCX16245DTR2XPC105ARX66CD PDC20265R TPA6011A4PWPR QMV585CT5MX7224LCWN PI5C3306L
反电动势过零点的检测方法是,通过测量不导通相的端电压,与电机的绕组中点电压进行比较,以得到反电动势的过零点。
但对于小电枢电感的永磁无刷直流电机,在许多情况下,绕组中点电压难以获取,并且需要使用电阻分压和进行低通滤波,这样会导致反电动势信号大幅地衰减,与电机的速度不成比例,信噪比太低,另外也会给过零点带来更大的相移。
与上面的方法相比,更为常用的是虚拟中点电压法。
假设A相和B相导通,则A和B两相电流大小相等,方向相反,C相电流为零,则根据永磁无刷直流电机数学模型有
根据上述方程,将不导通相的端电压与所计算的虚拟中点电压进行比较,也可以获得反电动势的过零点。
这种方法十分简单,实现也比较方便。
但是,由于无刷直流电机按一定频率进行PWM斩波控制,其计算出的虚拟中点电压也会随着PWM的高低电平而发生相同频率的在电源和地电平之间的变化。
这样,就会带来极大的共模电平和高频噪声,会影响反电动势过零点检测的精确性。
同样,和中点比较法一样,这种方法也必须要对绕组端电压进行分压和低通滤波。
这样,在一个PWM周期中,电枢绕组相电流就必然存在断续状态。
速度提高时,电枢绕组中会产生峰峰值极大、频率很高的反电动势。
由于以上特点,一些普遍采用的BLDC无位置传感器的控制方法均不适合。
现有的无位置传感器的控制方法,如端电压检测法和转子位置估计法等,将很难得到良好的控制效果,其理由如下所述:
首先,无刷直流电机要求在电机转速提高的过程中,采用现有的端电压与中点电压比较的方法,要对三相绕组进行分压阻容滤波,计算出不导通相反电动势的过零点,再延后一定时间进行换相。
但是,这样得到的反电动势过零点会因为无刷直流电机转速提高而产生过大的相移,导致当检测到反电动势过零点后,真正的换相点已经过去,从而造成换相失误。
另外,现有的转子位置估计法,在高速时必须以极高的采样频率对永磁无刷直流电机中多个物理量进行测量,然后运行复杂的算法估计出转子位置,这样即使采用主频较高的控制器,也很难实时得到精确的位置信号。
并且,随着电机转速的提高,位置估计算法难以及时地计算出当前电机转子的位置情况,对于转速范围较大的情况,无位置传感器的检测难以实现。
其次,现有的无刷直流电机无位置传感器的控制方法一般只适用于绕组相电流不存在断续状态的情况。
而当永磁无刷直流电机电枢电感较小时,在一个PWM周期中,则可能出现绕组相电流断续状态。
当相电流从续流状态向断流状态突变时,由于三相逆变桥中功率管的寄生电容和电枢绕组中的电感和电阻相互作用,端电压会存在二阶阻尼振荡过程。
在振荡过程中,将检测到的电枢绕组端电压应用于无位置传感器的换相中,会得到不正确的结果。
因此,使用现有的无位置传感器的控制方法,应用于小电枢电感的磁悬浮飞轮用无刷直流电机上,都无法得到良好的控制效果。