导航电文星历参数对卫星轨道精度的影响
GPS两种广播星历参数拟合及外推精度分析

2 0 1 3年 2月
大 地 测 量 与 地 球 动 力 学
J OURN AL OF GE ODE S Y AND GE ODYN AMI C S
V0 1 . 3 3 No .1 Fe b ., 2 01 3
文章编 号 : 1 6 7 1 — 5 9 4 2 ( 2 0 1 3 ) O 1 . 0 0 5 3 . 0 6
时轨 道拟合 , 误差损失 约为 1 4 e a, r 采用 1 8参数 3小时轨道拟合 , 误差损失约为 1 C T r l 。
关 键词 G P S 广播星历 ; G P S 现代化 ; 参数拟合; 轨道外推; 精度分析
中图分 类 号 : P 2 0 7
文献 标识 码 : A
ACCURA CY ANALYS I S OF TW O GPS BRo AD CAST EPH EM ERI S FI TTI NG AND EXTRAPoLATI oN ALG oRI TH M
b r o a d c a s t e p he me r i s whi c h we r e u s e d t o a na l y z e t h e o r b i t i f t t i n g a c c ur a c y a nd o r b i t e x t r a p o l a t i ng a c c u r a c y r e s p e e - t i v e l y.I t wa s s h o wn t h a t t h e 1 8 一 pa r a me t e r a l g o r i t h m i s a n o r d e r o f ma g n i t u de hi g h e r t h a n t he 1 6一 p a r a me t e r a l g o — r i t h m f o r t h e o r bi t it f t i n g a c c u r a c y i n t h e s a me it f t i n g i n t e r v a l ,a n d t he 1 8一 pa r a me t e r a l g o r i t h m i s b e t t e r t h a n t h e 1 6一 pa r a me t e r a l g o r i t h m or f t h e 2- h o u r o r b i t e x t r a p o l a t i o n . Ac c o r di ng t o t h e c u r r e n t GPS b r o a d c a s t e p h e me r i s u pd a t e
精密星历介绍

GPS精密星历目前,全球260多个lGS跟踪站中,我国占20多个,分布在武汉、拉萨、乌鲁木齐、昆明、上海等地,全球IGS网的GPS数据,由单台接收机交换(RINEX)格式生成的日观测和导航数据文件组成,其存储方式为ASCII码文本格式,内容包括观测值、导航星历信息、气象数据等。
这些数据经UNIX压缩后传送到相应的数据中心。
观测值文件包括从O0:O0:O0至23:59:59 GPS时段内所观测的数据。
采样率都采用标准的30s。
RINEX格式命名规则为:ssssdddf.yyt。
其中:SSSS表示测站名;ddd表示年积日(从1月1日起算);f表示一天内的文件序号(时段号0,1等);YY表示年号,如98表示1998,00表示2000等;t表示文件类型,0表示观测值,N表示星历,M 表示气象数据,G表示GLONASS星历,H 表示同步卫星GPS载荷的导航电文。
bjfs1230.040是一观测数据文件名,bjfs为站点代码(4字节),123为年积日,0为时段号,04代表2004年,O为文件性质码,代表观测文件。
bjfs1230.04n为站点广播星历文件,性质码用n表示,其中auto1230.04n 为广播星历文件,是必须下载的文件。
bjfs1230.04m 为气象数据文件,性质码用ITI表示。
IGS提供的重要信息不仅包括IGS跟踪站的观测值数据,还包括站点坐标、相应的框架、历元和站移动速度等。
IGS站坐标采用ITRF坐标。
IGS精密星历采用sp3格式,其存储方式为ASCII文本文件,内容包括表头信息以及文件体,文件体中每隔15 min给出1个卫星的位置,有时还给出卫星的速度。
它的特点就是提供卫星精确的轨道位置。
采样率为15分钟,实际解算中可以进行精密钟差的估计或内插,以提高其可使用的历元数。
1.命名规则常用的sp3格式的命名规则为:tttwwwwd.sp3其中:ttt表示精密星历的类型,包括IGS(事后精密星历)、IGR(快速精密星历)、IGU(预报精密星历)三种}wwww表示GPS周;d表示星期,0表示星期日,1~6表示星期一至星期六。
卫星导航-定位误差

• 适用于局部区域
全球模型
• 适用于全球区域
大气层结构
对流层延迟
来自卫星的信号在穿过电离层后,即穿过平流层和对流层, 平流层和对流层中的粒子多数是中性离子,对频率低于 30GHz的无线电信号没有散射作用,即非色散性。对流层 的折射与地面气候、大气压力、温度和湿度变化密切相关, 这也使得对流层折射比电离层折射更复杂。卫星信号在通 过对流层的过程中,不仅速度发生变化,而且传播方向也 发生变化,传播路径呈曲线。对流层折射的影响与信号的 高度角有关,观测卫星的高度角越小,则信号需经由较长 的路线才能穿过对流层,因而对流层对信号传播的影响越 大,在天顶方向(高度角为90°)的影响约2.3m,在地面方 向(高度角为10°)的影响可达20m。所以在应用卫星导航 时,通常避免观测高度角低于15°的卫星,以减弱对流层 的影响
呈现随机性。
测量误差的特性
测量的关键是与误差作斗争, 以求在一定条件下,获得误差影响 最小的、最优的测量结果。
测量误差的特性
粗差
• 特性 a. 异常性 b. 随机性
• 处理 a. 剔除 b. 采用“抗差估计”
测量误差的特性
系统性误差
• 特性 a. 固定性 b. 函数性 c. 累积性
• 处理 a. 模型化修正 b. “模型化参数”求解
电离层改正的经验模型简介
Klobuchar模型 由美国的J.A.Klobuchar提出 描述电离层的时延 广泛地用于GPS导航定位中 GPS卫星的导航电文中播发其模型参 数供用户使用
电离层
天顶方向 Z
中心电离层
约350km
电离层穿刺点 IP
电离层延迟的实测模型改正
基本思想 利用基准站的双频观测数据计算电离层延迟 利用所得到的电离层延迟量建立局部或全球的 的TEC实测模型
GPS复习题

一、名词解释1.导航电文GPS卫星的导航电文是用户用来定位和导航的数据基础。
它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕捉P码的信息。
2.伪距答:GPS定位采用的是被动式单程测距。
它的信号发射时刻是卫星钟确定的,收到时刻则是由接收机钟确定的,这就在测定的卫星至接收机的距离中,不可避免地包含着两台钟不同步的误差影响,所以称其为伪距。
3.静态定位如果在定位时,接收机的天线在跟踪GPS卫星过程中,位置处于固定不动的静止状态,这种定位方式称为静态定位。
4.GPS全球定位系统GPS全球定位系统是一个空基全天候导航系统,它由美国国防部开发,用以满足军方在地面或近地空间获取一个通用参照系中的位置,速度和时间信息的要求。
5.岁差在日月引力和其他天体引力对地球隆起部分的作用下,地球自转轴方向不再保持不变,这使春分点在黄道上产生缓慢的西移现象,这种现象在天文学中称为岁差。
6.星历误差答:实际上就是卫星位置的确定误差。
星历误差是一种起始数据误差,其大小主要取决于卫星跟踪站的数量及空间分布、观测值的数量及精度、轨道计算时所用的轨道模型及定轨软件的完善程度等。
7.SA技术答:其主要内容是:(1)在广播星历中有意地加入误差,使定位中的已知点(卫星)的位置精度大为降低;(2)有意地在卫星钟的钟频信号中加入误差,使钟的频率产生快慢变化,导致测距精度大为降低。
8.差分GPS答:利用相距不太远的两个GPS 测站在同一时间分别进行单点定位时所受到的卫星星历误差、大气延迟误差和卫星钟差等误差源的空间相关性较好的原理,利用基准站上的观测结果求得上述误差的影响并通过数据链将误差改正数发送给流动站从而提高流动站定位精度。
9.相对定位答:将两台接收机分别安置在基线的两个端点,其位置静止不动,并同步观测相同的4颗以上GPS卫星,确定基线两个端点在协议地球坐标系中的相对位置,这种定位模式称为相对定位。
10.相对论效应答:GPS卫星在高20200km的轨道上运行,卫星钟受狭义相对论效应和广义相对论效应的影响,其频率与地面静止钟相比,将发生频率偏移,这是精密定位中必须顾及的一种误差影响因素。
GPS 03 卫星运动基础及GPS卫星星历

3.3 卫星的受摄运动
太阳光压的影响
太阳辐射压力
太阳光压
入射作用力 发射作用力
反照压力(被地球反射的太阳光产生的压力,
为辐射压力的1%,可忽略)
对卫星产生的加速度,约为10-7m/s2量级
3.3 卫星的受摄运动
地球潮汐摄动力
地球固体潮
在日月引力作用下,地球产生的如潮汐般的变形。
海潮 大气潮
a as ae (G( M m) / r 2 ) r 0
0 a (GM / r ) r
2
3-4
X X / r 3 Y Y / r 3 Z Z / r 3
3-6
3.2 卫星的无摄运动
无摄运动:二体问题微分方程的解
100-800 1.0-1.5
3.3 卫星的受摄运动
受摄运动的研究
受摄加速度
无法直接求解; 摄动力或摄动力的分量——轨道参数的变率
da
dt
, de
dt
, di
dt
, d
dt
, dw
dt
, dM
dt
p29
3.3 卫星的受摄运动
描述卫星运动的参数
3.3 卫星的受摄运动
轨道参数
:星历的基准时间 :半长轴的平方根 a :偏心率 e :参考时刻的倾角 i0 :升交点赤经 0 :近地点角距 M 0 :平近点角 :轨道倾角变化率 I IODE :星历表数据龄期
如果将地球引力视为1,则其它作用力均小于10-5。 在多种力的作用下,卫星在空间运行的轨迹极其 复杂,难以用简单而精确的数学模型表达。
3.1 概述
卫星所受到的力
作用力 作用力来源 结 果 中心力 假设地球为均质 决定卫星 球体的引力(质 运动的基 量集中在球体的 本规律和 中心) 特征 摄动力 地球非球型对称 卫星偏离 (非中 的作用力、太阳、理想轨道 心力) 月亮和其它天体 引力、大气阻力、 太阳光压、地球 潮汐力等 卫星运动 卫星轨道 无摄运动 理想轨道 (无摄轨 道) 受摄运动 受摄轨道 (偏离量 的大小随 时间变 化)
(大学试卷)GPS原理与应用试卷A答案

《GPS 原理与应用》课程考试 试卷(A )答案一、名词解释(共6小题,每小题3分,共18分) 1.整周跳变:由于仪器线路的瞬间故障、卫星信号被障碍物暂时阻断、载波锁相环路的短暂失锁等因素的影响,引起计数器在某一个时间无法连续计数,这就是所谓的整周跳变现象(简称周跳)。
2.导航电文:由卫星向用户发送的有关卫星的位置、工作状态、卫星钟差及电离层延迟参数等信息的一组二进制代码,也称数据码。
3.卫星星历误差:由卫星星历给出的卫星轨道与卫星实际轨道之差。
4.静态绝对定位:是指在GPS 接收机天线处于静止状态下,确定测站的三维地心坐标。
5.广域差分GPS :在相当大的区域中均匀布设少量GPS 基准站,各基准站均将观测值送往数据处理中心以便卫星星历误差、卫星钟差、电离层延迟模型等分离出来,并播发给用户的差分GPS 系统称广域差分GPS 。
6.同步图形环:由不同时段的基线向量首尾相接构成的闭合图形。
二、单选题(共10小题,每小题1分,共10分) 1.以下哪个因素不会削弱GPS 定位的精度(D ) A 晴天为了不让太阳直射接收机,将测站点置于树荫下进行观测 B 测站设在大型蓄水的水库旁边 C 在SA 期间进行GPS 导航定位 D 夜晚进行GPS 观测 2.GPS 卫星信号的基准频率是多少?(B ) A 1.023MHz B 10.23 MHz C 102.3 MHz D 1023 MHz 3.GPS 测量中,卫星钟和接收机钟采用的是哪种时间系统?(B ) A 恒星时 B GPS 时 C 国际原子时 D 协调世界时 4.GPS 卫星之所以要发射两个频率的信号,其主要目的是为了(B ) A 消除对流层延迟 B 消除电离层延迟C 消除多路径误差 D 增加观测值个数 5.利用广播星历进行单点定位时,所求得的站坐标属于(C ) A1954北京坐标系B1980年西安坐标系CWGS-84 DITRF 6.在一般的GPS 短基线测量中,应尽量采用(C ) A 单差解 B 三差解 C 双差固定解 D 双差浮点解 7.载波相位测量值在历元间求差后可消去(D ) A 接收机钟差 B 卫星钟差 C 电离层延迟 D 整周未知数 8.某GPS 网采用某型号的GPS 接收机指标为:固定误差为3mm ,比例误差为2ppm ,对于一条2km 的基线,则该基线长度的中误差为(B )院系:专业班级:姓名: 学号:装订线A4mmB5mmC2mmD3 mm9.美国GPS中的SA政策对GPS卫星钟影响所产生误差可以采用哪种方式减弱(A)A测站间求差 B卫星间求差 C历元间求差 DAS10.在高程应用方面GPS可以直接精确测定测站点的(A)A 大地高 B正常高 C水准高 D海拔高三、多选题(共5小题,每小题2分,共10分,错选、多选不能得分)1.GPS广播星历中包含哪些内容(ACD)AGPS卫星的六个轨道根数 BGPS观测的差分改正CGPS卫星钟的改正 DGPS卫星的健康状态2.GPS定位中,为了尽量减弱和消除电离层延迟可以采取以下那些方法(ABC)A采用差分方式观测 B控制基线长度C采用双频改正 D采用水汽辐射计3.对于导航电文的第三数据块,下列哪些说法正确?(ABCD)A 第三数据块包含在第四、五子帧中B 给出了其余GPS卫星的概略星历C 由25个页面组成D 可用于拟定观测计划4.产生整周跳变的原因包括(ACD)A接收机在高速动态下运行 B接收机电源故障C信号被干扰 D信号被遮挡5.GPS接收机天线平均相位中心偏差与(AB)有关A天线类型 B接收信号频率C卫星天线相位中心偏差DSA四、填空题(共12小题,36个空,每空0.5分,共18分)1.目前正在运行的全球卫星导航定位系统有美国的GPS系统和俄罗斯的GLONASS。
GPS信号组成-导航电文
导航电文是用户用来定位和导航的数据基础。
它包含该卫星的星历、工作状况、时钟改正、电离层时延改正、大气折射改正以及由C/A码捕获P码等导航信息,也是由卫星信号中解调出来的数据码D(t)。
这些信息以50bit/s的数据流调制在载频上,数据采用不归零制(NRZ)的二进制码。
1、导航电文(D码)的内容(1)卫星星历(2)时钟改正(3)电离层时延改正(4)卫星状态(5)转换码2、导航电文的结构(1)基本构成(2)遥测码与转换码(交接字)(3)第一数据块(4)第二数据块(5)第三数据块导航电文的格式是:主帧、子帧、字码和页码。
每主帧电文长度为1500bit,播送速率为50bit/s,所以发播一帧电文需要30s时间。
每帧导航电文包括5个子帧,每子帧长6s,共含300bit。
第1、2、3子帧各有10个字码,每个字码为30bit,这3个子帧的内容每30s重复一次,每小时更新一次。
第4、5子帧各有25页,共有15000bit。
一帧完整的电文共有37500bit,要750s才能够传送完,用时长达12.5min。
其内容仅在卫星注入新的导航数据后才更新。
3、基本构成导航电文的内容包括遥测码(TLW)、转换码(HOW)、第一数据块、第二数据块和第三数据块等5部分。
4、遥测码与转换码(交接字)(1)遥测码(字)同步码:第1~8bit遥测电文:第9~22bit无意义连接比特:第23~24bit检校:第25~30bit每个子帧的第一个字码都是遥测码,作为捕获导航电文的前导。
其中所含的同步信号为各子帧提供了一个同步起点,使用户便于解释电文数据。
具体码位如下:第1~8bit为同步码(10001001),第9~22bit为遥测电文,包括地面监控系统注入数据时的状态信息、诊断信息和其它信息,以此指示用户是否选用该卫星。
第23、24bit无意义,第25~30bit为奇偶检验码。
(2)转换码Z计数:第1~17bit特殊标识1:第18bit特殊标识2:第19bit,同步标识,AS标识子帧标识:第20~22bit,第几子帧无意义连接比特:第23~24bit检校:第25~30bit每个子帧的第二个字码是转换码,它的主要作用是帮助用户从捕获的C/A码转换到P码的捕获。
GPS电文用户测距精度参数设计分析

GPS电文用户测距精度参数设计分析王陆潇;黄智刚;赵昀【摘要】为了研究卫星导航系统完好性参数设计对用户端完好性的影响,该文对GPS电文完好性参数中用户测距精度(URA)参数的分级方式及用户算法的变化进行了研究.采用实际国际GPS服务(IGS)广播电文数据与精密星历星钟数据进行仿真分析,证明了细化GPS用户测距精度分级方式的必要性.在此基础上,证明了采用相互独立的星历和星钟用户测距精度值能更好地描述卫星段误差.考虑传输段误差影响,利用广播星历构造卫星星座仿真分析了最坏用户位置处的测距误差,并采用加权法和最大方差法分别计算用户瞬时测距精度.对电文改进前后的两种区间划分标准和不同URA更新周期下的用户测距精度索引值进行比较分析.研究结果表明,导航电文采用5 bits将用户测距精度细化为32个区间能更好地区分不同卫星的测距误差,改善用户的完好性性能.【期刊名称】《南京理工大学学报(自然科学版)》【年(卷),期】2014(038)005【总页数】6页(P620-625)【关键词】卫星导航系统;完好性;用户测距精度;保护水平【作者】王陆潇;黄智刚;赵昀【作者单位】北京航空航天大学电子信息工程学院,北京100191;重庆邮电大学通信与信息工程学院,重庆400065;北京航空航天大学电子信息工程学院,北京100191;北京航空航天大学电子信息工程学院,北京100191【正文语种】中文【中图分类】TN967.1完好性是对导航系统提供的服务不满足服务需求时的一种告警能力。
用户测距误差(User range error,URE)是导航系统精度性能的重要评估指标。
用户测距精度(User range accuracy,URA)是对卫星段和控制段造成的用户测距误差的1σ估计,间接影响用户的定位精度。
GPS电文采用用户测距精度索引值(User range accuracy index,URAI)来指示轨道拟合时间内的URA,使卫星导航系统具备服务的告警能力,从而保障系统的完好性性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
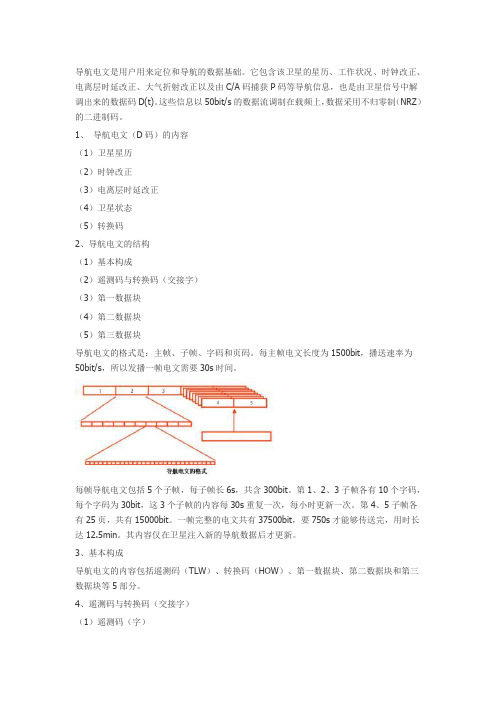
分析 。根 据导航 电文 中广 播 星 历参 数 计 算 所 得 的
轨道 我们称 之为 广 播 轨道 , 图 1中的 广播 轨 道 . 即 由于曲线拟 合误 差 , 广播 轨道 和预 报轨 道也存 在一 定 的偏 差 , 拟 合 误 差 ( i ig E rr ( m 级 ) 即 F t n ro ) c t 。
E
\
图 1 卫 星 轨 道模 型 以 及轨 道 误 差 矢量 分 解
制
实 际轨道 描述 了卫 星在轨 真实 运行状 态 , 由于 I GS提供 所 有 GP S卫 星 每 1 n的三 维 轨 道 坐 5mi
捌 群 鲤
L
标 , 有很 高 的精 度 , 具 因此 , I 将 GS精 密 星 历 给 出
基
\
图 2 2 1 / 1 1 日 GP 0 0 1 /4 S卫 星广 播 轨 道误 差
轨道不 可能 准确无 误 的反应卫 星 真实 的在轨信 息 , 总有 一 定 的偏 差 和 扰 动 , 图 1中的 差 值 。实 际 即
上 , 预报 轨 道 曲线 拟 合 为 一 系列 开 普 勒 轨 道 参 将
卫 星导 航 定 位 的关键 是 获 知导 航 卫 星发射 测
距信 号 时的精 确位置 , 而卫 星 的轨道信 息 即星历参
数是 以导 航 电文 的形 式发播 给用 户 , 户通 过接 收 用 卫 星信号 , 获取 包 括 星历 数 据 在 内 的导 航 电文 , 才 能够 计算 出卫 星位 置 , 而确定 用户 自身位 置 。因 从 此导 航 电文 中星历 参 数 质量 的好 坏 直接 决 定 卫 星 轨道 的精 度 , 进而影 响 到定 位精 度 。 全球 卫 星 导 航 系统 ( S GL NAS 、 L — GP 、 O S GA I L O 等) 发 的导航 电文 , E 播 特别 是卫 星 星历 参 数选 择 和结 构 设 计 均 有 所 差 异 , S GAL L O 广 播 GP / IE
的卫星 在 国际地球参 考框 架 (TF 系下 的轨道 坐 I R)
标 作为 实际轨 道 ( 考虑 坐标框 架 的转换误 差口 ) 不 ],
如图 1中 的精 密 轨 道 。而 预报 轨 道 则 根 据参 考 时 间之前 的精 密轨 道信息 和卫 星受力 模型 预测 得到 , 如 图 1中的预测 轨道 。 由于卫 星受 力 的复杂性 , 预 报轨道 和精 密轨 道总有 一定 的误差 。换 言之 , 预报
6 0
8 0
10 0 10 I0 2 4 10 6 10 8
耀
L
时 间 历 元 / h
6 0
8 0
10 0 l0 10 2 4 l0 6 1 0 8
时间历元/ h
图 4 一 周 以 后 GP S卫 星广 播 轨 道 误 差
{
由 图 4可 知 , 周 之 后 , 星 广 播 轨 道 误 差 变 一 卫
而将 广播 轨道 和 I GS精 密 轨道 之 问 的误 差 称 之为 广播 轨道误 差 ( 般 在 m 级 ) 如 图 1中 轨道 误 差 一 ,
的值 。 某一 历元参 考 时刻 , 由精 密星 历 (G ) 到 的 IS 得 卫 星地 心地 固坐 标 系 ( C F) E E 中实 际 位 置 矢 量 记
所示 。
为 R, 由同 一 时 刻 广播 星历 参 数 ( I E 计 算 的 R N X)
・
1 O・
全
球
定
位 系 统
PRN2 2 / / 4 21 4 0l 1 1 . l 1
第 3 7卷
E
\
E
嗤 捌
霍 幕 i 匾
2 0 4 0 2 0 4 0
广 播 星历参 数 的拟 和算法 , 析 了其 帧结 构设 计 的 分
一
些改 进 。
1 卫 星轨 道 精 度 分 析
导航 电文 中卫 星 星历 是 描述 卫 星运 行 轨 道 的
信息 , 卫星 星历按 精 度 可 分 为两 种 , 播 星 历 和精 广
密 星历 。广 播 星历 是 由美 国系 统 跟踪 站 观 测 数据 计 算 出的 卫 星 轨 道 外 推 得 出 的 , RI X 文 件 , 即 NE 并 由卫星实 时 向用 户 发 播 , 精 度较 低 , 般 在 i 其 一 T I 级 。而精密 星历 采用 地 区乃 至 全 球跟 踪 站 观 测 资
变 化 , 其 在 切 向 、 向 和 法 向 的 投 影 值 呈 现 周 期 性 余 弦 变化 , 演 变 周 期 与 G S轨 道 周 期 近 而 径 其 P
似 相等 , 而选取 改进 后 的 1 7个广播轨 道参数 表 示的 星历数据 于 1 5个 星历参数 对 比 , 其轨 道拟
和 误 差 值 改 善 2 3c ~ m.
关键 词 :导航 电文 ; 星历参 数 ; 星轨 道 卫
中图分类 号 : 28 4 P 2 . 文献标 志码 : A
文 章 编 号 :1 0 — 2 8 2 1 ) 2 0 0 - 7 0 8 9 6 ( 0 2 0 — 0 80
U 引
舌
征卫 星在轨 信息 。
具 体分 析 G S改进 前后 导航 电文 中星历 参数 P 对 其卫 星轨 道精度 的影 响 , 绍 了不 同频 点播 发 的 介
第 2期
周 昀等 : 导航 电文 星历参数 对卫 星轨 道精度 的 影响
・9 ・
圆轨 道附近 波动 的不规 则 曲线 , 而且使 得描 述其轨
同坐 标 系下 位 置矢 量 记为 R , R=R 一R 即为 广 △ = = 播轨 道误 差矢 量 , 该误 差 矢 量 投 影 到 三个 方 向, 将
道之 间的误差 , 将 其 投 影 到 卫 星 切 向、 向 和 法 向进 行 仿 真 研 究 。比较 了民 用导 航 电 文 并 径
( NAV) 旧民用导航 电 文( c 和 NAV) 星历参数 的差 异 , 用精 密 星历拟 和 出对 应 的广播 星历 的 利 参数 , 究其 星历参数 的 变化对卫 星轨 道精度 的影 响 。分析 了 GP 研 S不 同频 点播 发 的导航 电文 中星历 参数在 数据 帧 内的结构 。研 究结果表 明 : S卫 星广播 轨 道误 差 一 周 内在 2到 4m 内 GP
间段 内由导航 电文 中广 播 星历 参 数 计 算 所得 的各 颗 GP S卫 星广 播轨 道误差 。仿 真结 果 如 图 2和 图 3所示 , 中 x 轴 表 示 历 元 时 刻 , 0:0:0 其 即 —
2 4 0, 3: 5: 0 Y轴表 示卫 星 P RN序 号 , Z轴 则反 应 均方 误差 值 ( RMS 。 )
{j I I I 蝼 捌 乔 整 L
数 , 在导航 电文 中播发 出去 。如 GP 1频 点上 并 SL 的 NAV 电文 中 的 l 5个 开 普 勒 轨 道 参 数 (o te除
外 )L C 和 L ,2 5频 点 上 播 发 的 C NAV 电文 中 , 则 播发 了 1 7个轨 道参 数 (o te除外 ) 具体参 数 见下文 , 从 图 2中可 以看 出 , P N2 除 R 7号卫 星在 5 —6 点 , 5 8点 ,2 4点 轨道 误差 超 过 8m 以外 , 1 —1 2 ~2 其余 卫星一 天 内广播 轨 道 误 差均 在 3m 左 右 。图 3 反应 一天 以后各 颗卫 星 的轨 道误 差 变 化情 况 , 则 由图 可知 , 同样 , 了 P N2 除 R 7号卫 星 在 5 —6点轨
第3 7卷 第 2期
21 0 2年 4月
全 球 定 位 系 统
G N SS W or d hi a l of C n
Vo . 1 37, . No 2 Aprl 2 2 i, 01
导 航 电文 星 历 参数 对 卫星 轨道 精 度 的影 响
周 昀 , 智 刚 , 陆潇 黄 王
量分 解 由图 1中所示 。
以 2 1- 11 日、 11 日 , RN一 1 3 ( 0 01 -4 1 —5 P — 2 除
“ 播轨道 ” 如 图 1 示 。 广 , 所
4 1 号 星外 , 因是 R NE ,5 原 I X文件 中没 有 P N4和 R P RN1 某 些 时 间段 内 的广 播 星历 参 数 , 不 予 考 5 故 虑 。 为例 , 真分析全 天 0: 0 3: 5: 0时 ) 仿 0: —2 4 0
数, 由上述 参数 可 以计 算卫 星在 地心地 固坐 标系 中
的位 置 。
参数 选择 更加 合理 , 改进后 的星历参数 能精 确地 表
收 稿 日பைடு நூலகம் :2 1 一 81 0 1O —8
受各种 摄 动的影 响 , 星实 际轨迹 为其 理论椭 卫
联 系 人 :周 昀 E mal ik co @ 13 cr — i nk oh u 6 .o : n
示。
冀
{
2 0
4 0
6 0
8 0
10 0 10 10 2 4 10 1 0 6 8
化 规 律 基本 相 同 , 即除 P N2 R 7号 星 误 差 较 大外 ,
时间历元/ h
其余 卫 星广播 轨道 误差均 在 3m 左 右 。
观察 图 2到 图 4广播 轨道误 差波 形变化 , 现 发 该 误差波 形 具 有 一 定 的周 期 性 和 波 动 性 , 体 以 具 P RN2 4号卫 星 为例 , 析 其 在 一 周 内的 变 化 情 况 分 ( 2 1— l1 日到 2 即 0 0 1一4 1日) 。仿 真 结 果 如 图 5所
道 误差 超过 8m, 余卫 星一 天 内广播 轨 道误 差均 其