基于C#运用遗传算法的排课系统
基于2021版C-NCAP仪表板五星膝碰研究

2024年第1期引 言C-NCAP按照乘员保护、行人保护和主动安全三个部分的综合得分率来进行星级评价,其中乘员保护中的100%正面碰撞和MPDB碰撞与膝碰相关,分值分别2分和4分,占比分值较大,按照C-NCAP星级评定方案,整车碰撞若要达到C-NCAP五星需要综合得分率达到超过83%且小于92%(如表1),同时乘员保护、行人保护和主doi:10.3969/j.issn.1005-2550.2024.01.011 收稿日期:2023-11-15基于2021版C-NCAP仪表板五星膝碰研究李威,叶勤,亢胜利,王洪明,贺桥利(东风汽车集团有限公司研发总院,武汉 430058)摘 要:随着汽车工业的发展,汽车从“零死亡”向“零伤亡”再向“零事故”的终极目标不断前进,汽车的安全性尤其是碰撞安全越来越受到人们的关注。
相较于2018版C-NCAP,2021版仪表板knee-mapping试验采用正面50%重叠移动渐进变形壁障碰撞试验(MPDB)替代了正面40%重叠可变形壁障碰撞试验,同时引入了可变区域接触和集中力载荷的评分要求以及试验前提达成规则,评分要求越趋严格。
本文基于对2021版C-NCAP膝碰评分规程解读,探索并提出达成五星膝碰的仪表板设计方法。
关键词:C-NCAP;仪表板;五星膝碰中图分类号:U467.1+4 文献标识码:A 文章编号:1005-2550(2024)01-0061-09Based on the 2021 C-NCAP of IP Five-star Knee-mapping ResearchLI Wei, YE Qin, KANG Sheng-li, WANG Hong-ming, HE Qiao-li( Dongfeng Motor Corporation Research&Development Institute,Wuhan 430058, China)Abstract: With the development of the automobile industry, the ultimate goal of automobile from "zero death" to "zero casualties" and then to "zero accidents" continues to move forward, and the safety of automobiles, especially collision safety, has attracted more and more attention. Compared with C-NCAP 2018 version, knee mapping test of instrument panel 2021 version adopts front 50% overlap moving progressive deformation barrier crash test (MPDB) to replace front 40% overlap deformable barrier crash test, and introduces the scoring requirements of variable area contact and concentrated force load as well as the test prerequisite to achieve rules. Based on the interpretation of C-NCAP knee touch scoring procedures for 2021 edition, this paper explores and proposes a dashboard design method to achieve five-star knee-mapping.Key Words: C-NCAP; Instrument Panel; Five-Star Knee-Mapping李 威毕业于武汉理工大学,硕士研究生学历,现就职于东风汽车集团有限公司研发总院,任主管工程师,主要研究方向为汽车仪表板仪表板技术方案设计,曾发表相关论文3篇,并获得15项专利。
基于C
基于C摘要:应用c-d生产函数对1995-2008年聊城市的农业生产投入要素进行了测度与评价。
结果表明,聊城市农业生产处于规模报酬递增阶段,各要素的作用比较协调,处于稳步增长阶段;耗电量、化肥施用量、灌溉量对农业产出的增长作用分别为7.74%、4.65%和3.29%;耗电量和化肥施用量的弹性系数都远小于1,说明在目前情况下尚没有充分发挥其投资效益,仍有潜力可挖;影响农业总产出的因素除了已选择的耗电量、化肥施用量、灌溉量3要素外,还有技术水平的提高和政策因素的影响。
关键词:农业生产要素;c-d生产函数;测度与评析;聊城市中图分类号:f062.2 文献标识码:a 文章编号:0439-8114(2013)03-0734-04山东省聊城市近年来着力发掘其作为江北水城的特殊资源优势发展旅游业,因而要对境内水源做近一步的限制利用与保护,同时也间接造成了在聊城市既定可利用水量的前提下导致农业灌溉用水量下降的潜在趋向,这将影响聊城市农业产业结构。
因此,论证农业各生产要素是否协调,对农林牧渔的贡献到底多大,是否需要调整等显得尤为必要。
c-d生产函数是由数学家柯布和经济学家道格拉斯两人对美国1899-1922年期间的有关经济进行分析和估算时提出来的,直到目前仍被广泛认为是一种常用的生产函数。
近年来,此方法在国内外农业生产研究方面已有一些深入的研究与成功的运用,如王林等[1]对山东省农业投入产出进行了分析;杨君等[2]对塔里木盆地农业生产投入产出潜力进行了研究;秦耀辰等[3]通过构建生产函数对河南省东部平原的粮食生产进行过投入产出潜力评估。
然而在此模型的应用中对灌溉量、农业耗电量的讨论还较少,更多的是单纯的分析劳动力投入和耕地面积等要素对农业产出的影响[4,5]。
事实上现代农业已日益集约化、机械化,耕地面积、劳动力人数对农业产出的影响已不再是决定性的要素,引入更多要素便成为必然,例如代表灌溉量的有效灌溉面积[6],代表能源投入利用的耗电量以及与农业生产方式息息相关的化肥投入量等。
基于“C-POTE”模型的小学语文跨学科主题活动设计
-089-2023年第35期(总第375期)教学案例基于“C-POTE”模型的小学语文跨学科主题活动设计钱 枭摘 要:跨学科学习是学习方式、教学方式变革的新方向,主张在真实的生活情境中利用不同的学科思维解决实际问题。
主要论述基于“C-POTE”模型的小学语文跨学科主题活动设计,旨在让学生在跨学科主题学习活动中,结合具有逻辑性的问题链深化对学科上位概念的理解,由此在新的问题情境中学会迁移,并为教师在跨学科主题设计、活动实施上实现预估评价与科学打磨。
关键词:跨学科学习;“C-POTE”模型;大概念;问题链作者简介:钱枭(1994—),男,江苏省苏州市吴江区盛泽实验小学。
跨学科学习强调培养学生在真实的问题情境中运用不同的学科思维解决问题的能力,该能力不仅包含解决问题的策略性知识,更强调在面对不同问题情境时调整问题解决策略的迁移能力。
本文参照华南师范大学博士生导师詹泽慧的团队提出的以大概念为基础的跨学科主题学习“C-POTE ”模型,即“概念群→问题链→目标层→任务簇→证据集”,以“令人沉醉的中国美食”主题为例,设计跨学科主题学习活动,分析跨学科主题活动设计策略。
一、“C-POTE”模型与跨学科主题活动设计概述“C-POTE ”模型是由华南师范大学博士生导师詹泽慧的团队在核心素养目标的导向下,结合学习进阶和教学评一体化设计的核心思想所建构的,以大概念为基础的跨学科主题学习模型。
C 、P 、O 、T 、E 分别对应概念群、问题链、目标层、任务簇、证据集。
根据跨学科主题学习活动的不同阶段,教师和学生分别承担不同的驱动任务,共同指向核心素养的达成[1]。
概念群是整合多学科的关键纽带。
跨学科学习主张在真实的问题情境中运用不同的学科思维解决实际问题。
因此,跨学科学习的主题活动设计需要先从各学科的基本概念出发,寻找各学科基本概念的交叉点,形成上位的跨学科概念,再根据跨学科概念与社会生活中的实际问题设计跨学科主题。
教师要立足本学科核心概念,寻找不同学科概念之间的交叉点,结合真实情境,设计跨学科主题,让学生明白该解决什么问题。
基于51单片机的C语言流水灯程序

基于51单片机的C语言流水灯程序#include //51系列单片机定义文件#define uchar unsigned char //定义无符号字符#define uint unsigned int //定义无符号整数void delay(uint); //声明延时函数void main(){uint i;uchar temp;while(1){temp=0x01;for(i=0;i<8;i++) //8个流水灯逐个闪动{P2=~temp;delay(500); //调用延时函数temp<<=1;}temp=0x80;for(i=0;i<8;i++) //8个流水灯反向逐个闪动{P2=~temp;delay(500); //调用延时函数temp>>=1;}temp=0xFE;for(i=0;i<8;i++) //8个流水灯依次全部点亮{P2=temp;delay(500); //调用延时函数temp<<=1;}temp=0x7F;for(i=0;i<8;i++) //8个流水灯依次反向全部点亮{P2=temp;delay(500); //调用延时函数temp>>=1;}}}void delay(uint a) //延时函数,毫秒级别{uint i;while(--a!=0) //执行空操作循环,其中a为形参,由调用该函数的函数语句提供值{for(i=0;i<125;i++);//执行当0加到125时,大约会用掉1ms 的时间}}。
基于C的智能车辆控制系统设计与实现

基于C的智能车辆控制系统设计与实现智能车辆控制系统是近年来随着人工智能和自动驾驶技术的快速发展而备受关注的领域之一。
基于C语言的智能车辆控制系统设计与实现,是将传统的嵌入式系统与先进的智能算法相结合,实现车辆自主感知、决策和控制的重要手段。
本文将介绍基于C语言的智能车辆控制系统的设计原理、关键技术和实现方法。
一、智能车辆控制系统概述智能车辆控制系统是指通过搭载各类传感器、执行器和计算设备,使车辆具备感知周围环境、做出决策并执行行动的能力。
其核心任务是实现车辆在复杂道路环境下的安全驾驶和高效运行。
基于C语言的智能车辆控制系统设计,旨在充分利用C语言在嵌入式系统开发中的优势,如高效性能、可移植性和易维护性,为智能车辆提供稳定可靠的控制支持。
二、智能车辆控制系统设计原理基于C语言的智能车辆控制系统设计,通常包括感知模块、决策模块和执行模块三大部分。
感知模块负责获取车辆周围环境信息,如图像、雷达和激光雷达数据;决策模块根据感知信息做出驾驶决策,如路径规划和障碍物避让;执行模块则负责将决策转化为具体的行动,如油门、刹车和转向控制。
基于C语言的设计需要充分考虑系统实时性、稳定性和可扩展性等因素,确保系统在各种复杂场景下都能正常运行。
三、智能车辆控制系统关键技术传感技术:包括摄像头、毫米波雷达、超声波传感器等多种传感器,用于获取车辆周围环境信息。
数据融合:将不同传感器获取的数据进行融合处理,提高环境感知的准确性和鲁棒性。
路径规划:根据感知信息和导航目标,规划出最优路径,并考虑避障等因素进行路径调整。
控制算法:包括PID控制、模糊逻辑控制、强化学习等算法,用于实现车辆稳定行驶和智能决策。
通讯技术:与云端服务器或其他车辆进行通讯,实现信息共享和协同驾驶。
四、基于C的智能车辆控制系统实现方法硬件平台选择:选择适合嵌入式开发的硬件平台,如ARM Cortex-M系列芯片或树莓派等。
软件开发环境搭建:配置交叉编译工具链、调试器和开发板等工具,准备好开发环境。
基于模糊C聚类的图像检索系统
/
基 于模糊 C聚类 的图像检 索系统
何 苗
( 国海洋大学 信息工程 学院计算 机应用 , 岛 26 1 ) 中 青 6 1 1
摘
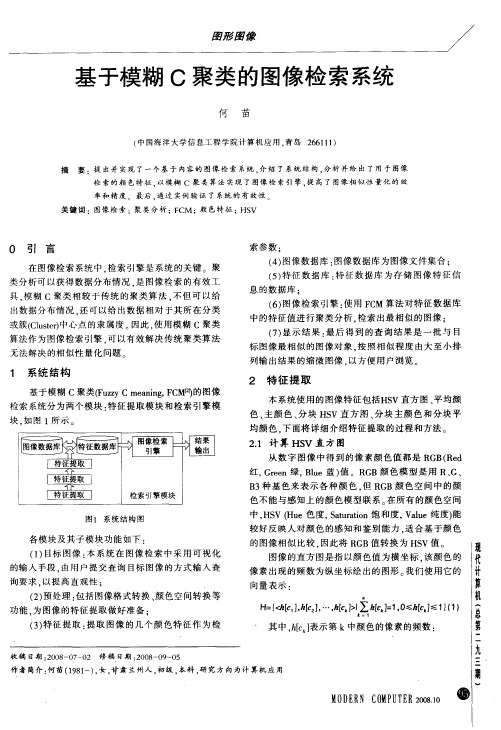
要 :提 出 并 实现 了 一 个 基 于 内 容 的 图像 检 索 系统 , 绍 了 系 统 结 构 , 析 并 给 出 了用 于 图 像 介 分
和 1 3 5 7块 的 平 均 颜 色 组 成 9维 数 组 作 为 另 一 / 、、、 个
组 作 为 一 个 特 征 向 量 , 提 取 0 2 4 6 8块 的 主颜 再 、、、、 特 征 向量 。 特 征 提 取 方 法 如下 :
这 里 ,1N N 、 2表 示 图 像 的 长 和 宽 , i】 示 象 素 I j表 【
的颜色 。 由于 直 方 图 向 量 的 维 数 非 常 多 . 如果 用 整 个 HS V
其 中 ,f 】 示 第 k中 颜 色 的像 素 的 频 数 : c 表
总 第
二
收 稿 日期 : 0 8 0 一 2 修 稿 目期 : 0 8 0 ~ 5 20- 7 O 20— 9 0
九
三
作 者简介 : 苗(9 1 )女 , 肃兰州人 , 何 18 一 , 甘 初级 , 本科 , 究方 向为计算机应 用 研
检索引擎模块
21 计 算 HS 直 方 图 . V
从 数 字 图像 中得 到 的 像 素 颜 色 值 都 是 R B( e G Rd 红 , re G e n绿 , le蓝 ) 。R Bu 值 GB颜 色 模 型 是 用 R、 G、 B 3种 基 色 来 表 示 各 种 颜 色 . R B颜 色 空 间 中 的颜 但 G 色 不 能 与 感 知 上 的 颜 色 模 型 联 系 在 所 有 的 颜 色 空 间 中 , V f e色 度 , auai HS Hu Strt n饱 和 度 , au o V le纯 度 ) 能
基于C语言的工业自动化

基于C语言的工业自动化在当今信息技术发展日新月异的时代,工业自动化成为了现代工业领域中不可或缺的一部分。
而在工业自动化的实现中,C语言作为一种高效、可靠并且广泛应用的编程语言,扮演着重要角色。
本文将以基于C语言的工业自动化为题,探讨C语言在工业自动化领域中的应用以及相关的开发技术与挑战。
1. 工业自动化简介工业自动化是指通过计算机技术和控制系统对工业生产过程进行自动化管理和控制的系统。
它不仅能提高生产效率、降低成本,还可以解决劳动力短缺和作业安全性等问题。
自动化系统中的核心是程序控制器(PLC)和现场总线系统。
2. C语言在工业自动化中的应用C语言因其高效性和可移植性等优势,得到了广泛的应用,尤其在工业自动化领域中。
以下是C语言在工业自动化中的应用场景。
2.1 系统控制C语言能够实现与PLC等控制设备的通信,通过编写控制程序来实现工业设备的精确控制。
通过C语言编写的控制程序,可以监测和控制各个参数,确保工业生产过程的顺利进行。
2.2 数据处理与分析工业自动化需要对大量的数据进行采集、处理和分析,以便进行生产过程的监控和优化。
C语言提供了强大的数据处理和算法支持,能够对采集到的数据进行实时处理,并根据预设条件进行判断和反馈。
2.3 用户界面开发C语言可以用于开发人机界面(HMI),使工业自动化系统更加友好和易于操作。
通过C语言的图形库和用户界面库,可以实现工业自动化系统的各种界面设计和逻辑控制。
3. 基于C语言的工业自动化开发技术与挑战在开发基于C语言的工业自动化系统时,有一些值得注意的技术与挑战。
3.1 多线程编程工业自动化系统常常需要同时处理多个任务,因此需要采用多线程编程技术。
C语言提供了丰富的多线程编程库和函数,可以方便地实现多线程任务的管理和协调。
3.2 数据安全性与可靠性工业自动化系统的数据安全性和可靠性是至关重要的。
C语言可以通过加密算法和数据校验等手段,确保数据在传输和处理过程中的安全性,并通过异常处理机制保证系统的可靠性。
基于C语言的ERP系统开发
基于C语言的ERP系统开发企业资源计划(ERP)系统是为了满足企业管理的需求而开发的一个集成化应用软件。
它整合了企业的各个业务模块,包括销售、采购、库存、财务等,以提供企业管理和决策的支持。
本文将介绍基于C语言的ERP系统开发的相关内容。
一、引言随着信息技术的发展和企业规模的扩大,传统的手工管理已经无法满足企业的需求。
因此,开发一个高效、稳定的ERP系统成为企业的迫切需求。
基于C语言的ERP系统开发具有代码可读性强、运行效率高等优势,是一个不错的选择。
二、系统需求分析在开发ERP系统之前,我们首先需要进行系统需求分析。
这包括对企业各个部门的业务流程、数据管理需求等进行详细的调研和了解。
通过与企业合作伙伴的沟通,我们可以获得以下几个需求:1. 销售管理:包括客户管理、订单管理、销售报表生成等功能。
2. 采购管理:包括供应商管理、采购订单管理、采购物料管理等功能。
3. 库存管理:包括入库管理、出库管理、库存盘点等功能。
4. 财务管理:包括账务管理、报表生成、财务分析等功能。
三、系统设计与架构基于C语言的ERP系统开发需要合理的系统设计与架构。
以下是一种常用的设计思路:1. 数据库设计:根据系统需求,在关系型数据库中设计适当的数据表,以存储企业各个模块的数据。
通过合理的表结构设计,可以提高数据的存储效率和查询速度。
2. 模块设计:将系统按照各个功能模块进行划分,比如销售模块、采购模块、库存模块等。
每个模块有独立的功能和数据处理逻辑,但又可以相互调用和交互。
3. 用户界面设计:设计用户友好的界面,以方便用户的操作和数据输入。
可以采用图形界面或者命令行界面,根据实际情况进行选择。
4. 系统集成设计:将各个功能模块进行整合,确保它们能够协同工作、相互传递数据。
这需要进行适当的接口设计和数据传输方式选择。
四、系统开发在系统设计与架构确定后,就可以开始进行系统开发。
基于C语言的ERP系统开发需要遵循一定的开发流程,包括以下几个步骤:1. 环境搭建:搭建适合开发的开发环境,包括C语言编译器、数据库管理系统等。