压电柔性臂动力学模型修正研究
混凝土泵车液压柔性臂架动力学分析与控制
东北大学
硕士学位论文
混凝土泵车液压柔性臂架动力学分析与控制
姓名:张婧
申请学位级别:硕士
专业:机械电子工程
指导教师:刘杰
20060101
东北大学硕士学位论文第四章系统动力学分析与数值仿真
求解器的计算时间主要由方程求解、分析雅可比矩阵和数值计算雅可比矩阵三部分时间组成。
实际工作中,用户采用MEBDFDAE求解器对所求问题进行数值仿真可以在FortranPowerStation4.0环境下进行。
FortranPowerStation40是基于Fortran90标准的Fortran应用程序的集成开发环境,可运行于Windows95及以上的操作系统中。
数值仿真的主要步骤如下:
(1)建立微分代数方程,并化为求解器需要的形式;
(2)通过在FortranPowerStation4.0环境下采用Fortran语-k编制求解程序,对建立的DAE方程进行程序输入,在此程序中要调用MEBDFDAE求解器文件,将编制的程序保存为文件:
(3)建立项目ProjectWorkspace,将MEBDFDAE求解器文件及(2)中编制的程序文件添加到项目当中,对(2)中编制的程序文件进行编译、链接、执行,最终计算结果以.dat的形式输出。
(41将输出的计算数据绘成图形,进行分析。
FortranPowerStation4.0环境下仿真工作窗口如图42所示。
图4.2FortranPowerStation4.0环境下仿真工作窗口
Fig.4.2SimulatingworkwindowunderFortranPowerStation4.0。
压电悬臂梁发电装置的建模与仿真分析
压电悬臂梁发电装置的建模与仿真分析一、本文概述随着能源危机和环境问题的日益突出,绿色、可再生的能源技术成为了全球研究的热点。
其中,压电发电技术作为一种新型的无源能量收集方式,因其能够将环境中的机械能转化为电能,受到了广泛关注。
压电悬臂梁作为压电发电装置的核心部分,其发电性能直接影响到整个装置的能量转换效率。
因此,对压电悬臂梁发电装置的建模与仿真分析,不仅有助于深入理解其发电机制,而且可以为装置的优化设计提供理论依据。
本文旨在探讨压电悬臂梁发电装置的建模与仿真分析方法。
我们将对压电悬臂梁的基本工作原理进行概述,包括压电效应的基本原理和压电悬臂梁的工作机制。
我们将详细介绍压电悬臂梁发电装置的建模过程,包括力学模型、电学模型以及机电耦合模型的建立。
在此基础上,我们将利用仿真软件对模型进行仿真分析,研究不同参数对压电悬臂梁发电性能的影响。
我们将总结分析结果,提出优化压电悬臂梁发电装置的建议和展望未来的研究方向。
通过本文的研究,我们期望能够为压电发电技术的发展提供有益的理论支持和实践指导,推动其在能源收集领域的广泛应用。
二、压电悬臂梁发电装置理论基础压电悬臂梁发电装置的核心理论基础主要源于压电效应。
压电效应,即某些晶体在受到机械力作用时,其内部正负电荷中心会发生相对位移,从而在晶体表面产生电势差的现象。
这种效应允许机械能直接转化为电能,为悬臂梁发电装置提供了理论基础。
在压电悬臂梁发电装置中,悬臂梁作为主要的能量转换元件,当受到外部激励(如风、振动等)作用时,梁体会发生形变,进而产生压电效应。
此时,悬臂梁的表面会产生电荷分布,形成电势差,从而输出电能。
为了深入理解和优化压电悬臂梁发电装置的性能,需要对其进行数学建模。
常见的建模方法包括集中参数模型和分布参数模型。
集中参数模型主要关注悬臂梁的整体动态特性和压电效应,适用于低频、大振幅的情况。
而分布参数模型则考虑悬臂梁的详细结构和振动模态,适用于高频、小振幅的情况。
柔性机械臂运动控制策略研究

柔性机械臂运动控制策略研究柔性机械臂是一种具有柔软、弹性特点的机械臂,被广泛应用于机器人领域。
其柔性结构使得机械臂能够适应复杂的工作环境,具有较高的灵活性和可靠性。
然而,由于其结构特点,如何有效地控制柔性机械臂的运动成为了研究的重点。
一种常见的柔性机械臂运动控制策略是基于传统PID控制算法的方法。
PID控制算法利用反馈控制的原理,根据实时的位置/角度误差来调整控制信号,使机械臂达到预期的运动目标。
然而,由于柔性机械臂的动力学特性复杂,PID控制算法往往无法满足高精度运动控制的需求。
因此,研究者们提出了许多改进的控制策略。
一种改进的控制策略是基于模型预测控制(MPC)的方法。
MPC方法通过对机械臂的动力学模型进行建模和预测,从而得到更加精确的控制信号。
与PID控制算法相比,MPC方法能够更好地处理柔性机械臂的非线性和时变特性,提高运动控制的精度和稳定性。
然而,MPC方法也存在计算复杂度高、实时性差的问题,需要进一步改进和优化。
另一种改进的控制策略是基于人工智能的方法,如深度学习和强化学习。
深度学习通过构建深度神经网络模型,从大量的实验数据中学习机械臂的运动规律,实现自适应控制。
强化学习则通过不断与环境交互,学习出最优的运动策略。
这些基于人工智能的方法能够克服传统控制方法的局限性,具有较好的运动控制效果。
然而,这些方法仍然存在训练时间长、模型不可解释等问题,需要进一步完善。
除了以上提到的控制策略,还有一些其他的研究方向。
例如,基于自适应控制的方法,根据实时的系统状态,自动调整控制参数以适应系统的变化;基于优化算法的方法,通过求解最优化问题,得到最优的运动规划和控制策略。
这些研究方向都在不断推动柔性机械臂运动控制策略的发展。
综上所述,柔性机械臂运动控制策略的研究涉及传统控制算法、模型预测控制、人工智能等多个方面。
不同的控制策略在柔性机械臂运动控制的精度、稳定性和实时性上都有各自的优劣。
随着科技的不断发展,我们相信在不久的将来,柔性机械臂的运动控制技术会进一步突破和创新,为机器人领域的应用带来更多的可能性。
组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告

组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告一、研究背景柔性机械臂具有结构灵活、可冗余、质量轻等优点,在机器人领域中具有广泛应用前景。
然而,在实际应用过程中,柔性机械臂所带来的振动问题给控制系统带来了很大的挑战。
因此,研究柔性机械臂的动力学特性和振动抑制性能,对其优化设计和精确控制具有重要意义。
二、研究目的本文旨在:1. 深入探究柔性机械臂的动力学特性,分析和建立柔性机械臂的动力学模型。
2. 研究柔性机械臂的振动抑制性能,探究影响柔性机械臂振动的因素及其对振动抑制的影响。
3. 组合动力学与振动抑制分析,提出有效的柔性机械臂振动抑制方法并进行实验验证。
三、研究内容本文将围绕柔性机械臂的动力学特性和振动抑制性能展开研究工作,具体包括以下内容:1. 对柔性机械臂的动力学特性进行深入分析,在建立动力学模型的基础上模拟分析柔性机械臂的运动学和动力学特性。
2. 探究柔性机械臂振动的原因,包括结构刚度、质量分布等对柔性机械臂振动的影响,并对振动抑制技术进行综述。
3. 基于系统鲁棒控制的方法,提出柔性机械臂的振动抑制控制方法。
设计集中式控制器并验证其有效性。
4. 通过实验验证柔性机械臂的动力学特性和振动抑制性能,并与其他已有的方法进行比较,以评估所提出的方法的有效性和实用性。
四、研究意义本文研究的柔性机械臂动力学特性和振动抑制性能对提升柔性机械臂的精度和控制能力具有重要意义,具体有以下几点:1. 深入研究和掌握柔性机械臂的动力学特性和振动抑制技术,有助于优化柔性机械臂设计,提高其控制精度。
2. 所提出的柔性机械臂振动抑制控制方法,为柔性机械臂的实际应用提供了一种新的控制途径,具有重要的理论和实用价值。
3. 相关研究成果可以为机器人领域中的其他柔性结构的动力学分析和振动抑制技术提供有益借鉴和参考。
五、研究方法和技术路线本研究主要采用理论分析和实验验证相结合的方法,具体技术路线如下:1. 对柔性机械臂的动力学特性和振动抑制技术进行综述和分析,总结相关理论和方法。
机器人手臂动力学建模及系统动力学分析

机器人手臂动力学建模及系统动力学分析机器人手臂在工业生产中的应用越来越广泛,如汽车制造、飞机制造、电子工业等,但机器人手臂的运动和控制一直是一个研究的难点。
本文将介绍机器人手臂动力学建模及系统动力学分析方面的研究进展。
一、机器人手臂动力学建模机器人手臂动力学建模是机器人手臂运动学分析的进一步扩展,它对机器人手臂在特定工况下运动的动力学特征进行建模,求解机器人手臂各部分的运动学和动力学参数。
1. 机器人手臂运动学与动力学机器人手臂的关节运动可以用一组运动方程来描述,在机器人手臂运动学研究中,可以根据运动方程求出机器人手臂各部分的位置和速度。
但是机器人手臂在执行特定工况下的运动时需要考虑到力的作用,因此需要对机器人手臂的动力学特征进行建模。
机器人手臂的动力学特征可以用质点制定片段(元件)间相对运动方程和牛顿-欧拉动力学方程来进行描述。
质点片段相对运动方程是机器人手臂动力学建模的基础,通过它可以求解机器人手臂各部分的加速度以及各部分之间的运动关系。
而牛顿-欧拉动力学方程则用来描述机器人手臂部件的动态特征,对于不同工况下的机器人手臂运动,可以使用不同的动力学方程进行求解。
2. 机器人手臂运动学建模机器人手臂的运动学可以使用DH方法进行建模。
DH方法是指将机器人手臂的一系列关节和连接构件看作一个连续的系统,然后通过D(连杆长度)、A(自由度长度)、α(相邻关节连线夹角)和θ(相邻关节角度)这四个参数来描述机器人手臂的运动学特征。
机器人手臂的坐标系采用右手系,当机器人手臂的运动到某一特定位置时,可以通过求解其DH参数和转换矩阵来得到机器人手臂的各部分坐标。
在机器人手臂的运动学建模过程中,需要使用逆运动学求解算法,以确定机器人手臂各部分的运动方程。
3. 机器人手臂动力学建模机器人手臂的动力学建模需要考虑到不同工况下机器人手臂受到的外界力矩、加速度等因素,因此需要使用不同的动力学方程进行求解。
其中,最常用的是牛顿-欧拉动力学方程。
六自由度空间柔性机械臂的动力学分析与控制的开题报告
六自由度空间柔性机械臂的动力学分析与控制的开题报告
1. 研究背景
机器人技术的发展促进了工业自动化的进一步发展,柔性机械臂作为一种新型的机器人,具有机械臂与人类肢体相似的特性,同时具有高度的柔性和灵活性,在智能
制造、物流仓储等领域有着广泛的应用前景。
因此,针对六自由度空间柔性机械臂的
动力学分析与控制的研究具有现实意义和科学价值。
2. 研究内容
本文拟从以下几方面进行研究:
(1)六自由度空间柔性机械臂的运动学建模与分析:建立柔性机械臂的数学模型,分析其工作空间和机构运动;
(2) 六自由度空间柔性机械臂的动力学分析:综合考虑柔性结构,建立柔性机械
臂的动力学模型,分析在工作过程中的力学特性;
(3) 六自由度空间柔性机械臂的控制算法研究:针对柔性机械臂的特点,设计控
制算法,保证柔性机械臂的运动控制效果;
(4) 六自由度空间柔性机械臂的实验验证:设计柔性机械臂的实验平台,进行机
器人的实验验证和测试。
3. 研究意义
本文研究六自由度空间柔性机械臂的动力学分析与控制,对于完善机器人控制策略,提高机器人的动作精度和稳定性,推进柔性机器人的应用具有重要意义。
4. 研究方法
本研究主要采用理论模型的数学推导与仿真模拟的方法,依托于计算机模拟软件,系统分析六自由度空间柔性机械臂的动力学性能,研究机械臂在不同工况下的运动学
结构特性和控制策略,最终进行实验验证。
5. 预期成果
本文的预期成果为:建立六自由度空间柔性机械臂的动态数学模型,分析机械臂工作空间、运动学特性和动力学特性,设计柔性机器人的控制算法,验证柔性机械臂
在不同操作场景下的性能和稳定性。
柔性板压电作动器的优化位置与主动控制实验研究
因而作动 器位置 的不 当放 置 有 可能 激 发起 未 控模 态 的 响应 , 而导致控 制溢 出 ; 传感 器 位 置 的不 当 选择 会 从 而 使得所 采集 的信 号 中包 含 有 过 多 未 出。 因此 , 动器/ 作 传感 器 的优 化位 置 是
t i r是一类基 于群智能 ( w r t l e c ) iz ) me S am I e i ne 的随机 优 n lg 化算法 , 该方法具 有简单 易 行 、 计算 效 率 高 、 收敛 速度
其, [A[0 ]=?。入 中 =]= M , [ ] 二 一一 输 , 三
众所 周知 , 性结 构 ( 系统 ) 柔 或 为分 布 参数 系统 , 具 有无 穷多 自由度 。柔 性结 构 的 主动 控 制 实质 上 是 采用
有 限数量 的作 动 器 对 无 穷 多 自由度 的系 统 进 行 控 制 ,
位置 进行 研究 , 出粒子 群 算 法 的计 算格 式 , 且 通 过 给 并 数值仿 真 验算 该优 化方法 的有 效性 。
矩阵 决 定 于 控 制力 向量 配 置矩 阵 L, 由作 动 器 的位 置和类 型 决定 。本 文 中采 用 压 电作 动 器 , 动 器 向结 作
构 施加 控制 力矩 , 此其 控 制 力 ( ) 因 矩 向量 配置 矩 阵与
结 构模 态 的偏 导 数 有 关 , 可 以通 过 对 离 散 模 态 进 行 这 拟 合而 得到 连 续 形 式 的 模 态 函数 , 而 得 到 模 态 函数 进
f GKZ D0l 8 7) 00
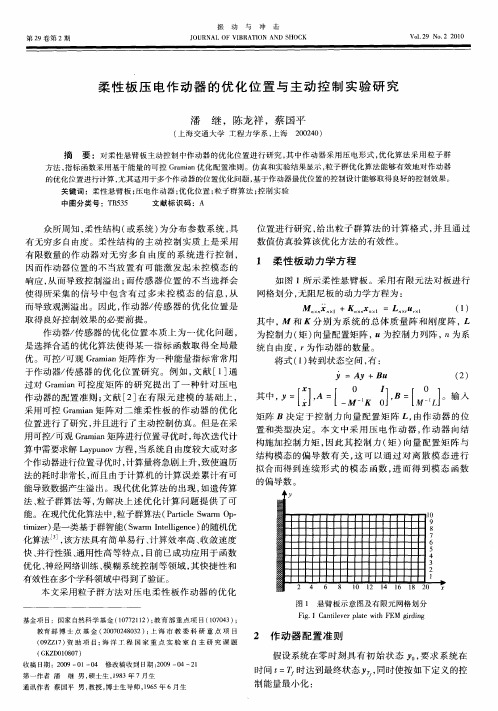
Fi 1 g. Ca ie e a e wih F nt v rplt t EM id n l gr i g
其 中 , 和 分 别 为 系 统 的 总 体 质量 阵 和 刚度 阵 , 为控制 力 ( ) 矩 向量 配 置矩 阵 , U为控 制力 列阵 , n为系 统 自由度 ,r 为作 动 器 的数 量 。 将式 ( ) 到状 态空 间 , : 1转 有
压电耦合悬臂梁的时滞反馈控制及稳定性分析

第3 O卷第 6期
动
与
冲
击
J OURNAL OF VI BRAT ON AND S I HOCK
压 电耦 合悬 臂梁 的 时滞反 馈控 制及 稳定 性 分析
冯 志宏 ,霍
( .山东大学 机械: 程学院 , 1 [ 济南
睿 '
20 6 ) 5 0 1
2 06 ; .山东大学 高效洁净机械制造教育部重点实验 室 , 50 1 2 济南
摘 要 :基于加速度 ~ 时滞闭环反馈控制策略, 建立压电耦合柔性悬臂梁的动力学模型, 通过运用模态分析和对
系统 自由振 动的平凡解 的分析 , 建立 了在考虑压电耦合作用和反馈 时滞条件下 的系统稳 定性条件和分析方法 , 并给 出了
具体算例 ; 一步的算例分析表明, 进 时滞 的不 合 理 忽 略 有 可 能 导 致 系统 响应 发 散 , 而合 理 的时 滞 量 也 可 用 以 提 高振 动 控 制
piz ee ti— o pl g fe i l a tlv r e m s e u e o lcrc c u i x b e c n ie e b a wa s t p. Th sa ii c n i o s n d n mi c a a trsis f t e n l e tb l y o d t n a d y a c h r c e itc o h t i
p e o l crc c u ln n i e d ly we e c n i e e n pe i c e a l sp e e t d t r o h r vo sr s l . i z ee ti o p i g a d t ea r o sd r d a d a s cf x mp e wa r s n e o p o ft e p e i u e ut m i s Th x mp e S O h tin rn i e d l y u r a o b y ma a s h y tm o r s n ie g nl e e a l H WSt a g o i g t m — ea n e s na l y c u et e s se t e po d dv r e t y,whl e s n b e i a r a o a l e a un ftme d ly c n i r v he e ce y o i ai n c nr 1 mo to i — ea a mp o e t f inc fvbrto o to . i Ke r y wo ds: a t e c n rl i — e a ci o to ;tme d ly; sa i t v t b l y;p e o lcrc i i z ee ti
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ma n i p u l a t o r wa s r e g a r d e d a s E u l e r — Be r n o u l l i b e a m p r o c e s s i n g .As s u me d ・ mo d e me t h o d wa s e mp l o y e d t o d e s c i r b e t h e e l a s t i c d e f o r ma t i o n o f l f e x i b l e ma n i p u l a t o r ,a n d L a g r a n g e e q u a t i o n w a s u s e d t o s e t u p i t s d y n a mi c s mo d e 1 .T h e s t i f f n e s s a n d d a mp i n g o f t h e s y s t e m mo d e l
2 0 1 3年 8月 第4 1 卷 第 1 5期
机床与液压
MACHI NE T00L & HYDRAULI CS
Au g . 2 01 3
V0 l _ 41 No . 1 5
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 1 5 . 0 1 2
C AO Q i n g s o n g ,WA N G H u i ,HO N G Y u n y u n ,H E Y u e h a i ( K e y L a b o r a t o r y o f Mi n i s t r y o f E d u c a t i o n f o r C o n v e y a n c e a n d E q u i p m e n t , E a s t C h i n a J i a o t o n g U n i v e r s i t y , N a n c h a n g J i a n g x i 3 3 0 0 1 3,C h i n a )
m a n i p u l a t o r d y n a mi c s b e h a v i o r a n d c o n t r o l m e t h o d .I n t h e t r a d i t i o n a l d y n a m i c s m o d e l i n g , t h e i m p a c t s o f s t r u c t u r l a c h a n g e s , j o i n t f r i e — t i o n ,s t uc r t u r l a d a m p i n g a n d w i r e f a c t o r s w e r e i g n o r e d .B y t a k i n g t w o — l i n k l f e x i b l e m a n i p u l a t o r a s t h e r e s e a r c h o b j e c t , t w o — l i n k l f e x i b l e
中图分类号 :T P 2 4 1 文献标识码 :A 文章编 号 :1 0 0 1 — 3 8 8 1( 2 0 1 3 )1 5—0 4 5— 5
Re s e a r c h o n Dy na mi c s Mo de l Mo di ic f a t i o n 0 f Pi e z o e l e c t r i c Fl e x i bl e Ma ni pu l a t o r
压 电柔 性 臂动 力学 模 型修 正 研 究
曹青松 ,王辉 , 洪芸芸 ,何 悦海
( 华 东交通大学载运工具与装备教育部重点实验 室, 江西南昌 3 3 0 0 1 3 )
摘要 :建立准确 的动力学模型是研究压 电柔性臂 动力学行为和控制方法 的基础和理 论依据 。传统 的动力学建 模忽略 了 柔性臂 的结构变 化 、关 节摩擦 、结构阻尼 和导线 因素等 的影 响。以双连 杆柔性 臂为研 究对象 ,将 双杆 柔性 臂视为 E u l e r — B e r n o u l l i 梁处 理 ,采用假设模态法描述臂 的弹性 变形 ,利用拉格 朗 日方程建立 双杆柔性臂 动力学模 型 。对 系统模 型进 行 了 刚度与 阻尼 方面的适 当修正 ,并结合 MA T L A B软件对修正后 的模型特性进行分析 。实验 与仿 真结 果 比较得 出 :修 正后 系统 的转角 曲线线性 度更 好 ,并且修正后模 型与 真实模型的弹性振动变化形式 吻合度更 高 ,即系统模 型的弹性 修正是有效的 。 关键词 :压 电柔性臂 ;动力学模型 ;模型修正