动臂塔式起重机起重性能曲线研究
动臂系列塔吊性能
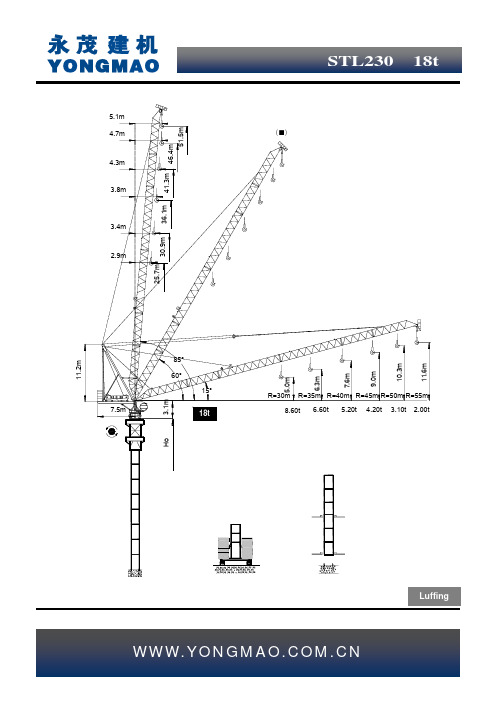
Luffing載荷表 Load Chart主要性能參數 Main SpecificationskVA 380V (±5%) 50 Hz / 60 Hz200* ※ 與製造商聯繫 Contact with us, please .塔身節 Mast 臂長 Jib lengthA (m)B (m)C (m) H (m) H205BL1-2-330/48 24/36 32 160 >160*L4-5 30/42 24/30 30 L6 30/42 24/30 28L69B1L1 41 35 42 153>153*L235 29 36L3 32 26 33L4-5 29 23 30 L626 20 27塔身節Mast 臂長 Jib length H1 (m) A (m) P (t) R (t)X (m)Y (m)H205BL1 60 18124 ※ 3.28 2.40L2-3 54 121 ※ 3.28 2.40L4-5-6 48 116 ※ 3.28 2.40L1-2-3 42 12112 ※ 3.28 2.40L4-5 36 107 ※ 3.28 2.40L6 30 103 ※ 3.282.40L69B1L1 49.512-15 99 41.5 2.58 2.17L2-3 43.512-15 97 41.5 2.58 2.17L4-5 40.512-15 96 41.5 2.58 2.17L637.512-15 94 41.5 2.582.17Luffing載荷表 Load Chart2.4t10.0t3040506019.69m17.31m1218(m)(t)IV IILuffing STL330-12t工作狀態支反力 Ho(m)主要性能參數 Main SpecificationskVA 380V (±5%) 50 Hz / 60 Hz240* ※ 與製造商聯繫 Contact with us, please .塔身節 Mast臂長 Jib lengthA (m)B (m)C (m) H (m)H205BL130/48 24/36 32 400L2-3 30/42 24/30 30 L430/42 24/30 28塔身節Mast 臂長 Jib length H1(m) A (m) P (t)R (t)X (m)Y (m)H205BL1 6018 91.2※ 2.95 2.42L2-3 5492.2-93.1※ 2.95 2.42L4 4893 ※ 2.95 2.42L1 4812 91.2※ 2.95 2.42L2-3 3692.2-93.1※ 2.95 2.42L43093※2.952.42Luffing載荷表 Load Chart2.4t10.0t3040506019.69m17.31m1218(m)(t)IV IIHo(m)工作狀態支反力主要性能參數 Main SpecificationskVA 380V (±5%) 50 Hz / 60 Hz300* ※ 與製造商聯繫 Contact with us, please .塔身節 Mast臂長 Jib lengthA (m)B (m)C (m) H (m)H205BL130/48 24/36 32 400L2-3 30/42 24/30 30 L430/42 24/30 28塔身節Mast 臂長 Jib length H1(m) A (m) P (t)R (t)X (m)Y (m)H205BL1 6018 91.2※ 2.95 2.42L2-3 5492.2-93.1※ 2.95 2.42L4 4893 ※ 2.95 2.42L1 4812 91.2※ 2.95 2.42L2-3 3692.2-93.1※ 2.95 2.42L43093※2.952.42Luffing載荷表 Load Chart30工作狀態支反力 4.9t 8t10.85t3040506025.7m23.1m 18.9m 0121824(m)(t)IV III II主要性能參數 Main SpecificationskVA 380V (±5%) 50 Hz / 60 Hz300* ※ 與製造商聯繫 Contact with us, please .塔身節 Mast 臂長 Jib lengthA (m)B (m)C (m) H (m) H205BL130/48 24/36 32 400 >400*L2-3 30/42 24/30 30 L430/42 24/30 28塔身節Mast 臂長 Jib lengthH1(m) A (m) P (t) R (t) X (m)Y (m)H205BL1 6018119※ 3.28 2.40L2-354119 ※ 3.28 2.40L4 48119 ※ 3.28 2.40L1 4812119※ 3.28 2.40L2-3 36119 ※ 3.28 2.40L430119※3.282.40Luffing載荷表 Load Chart主要性能參數 Main SpecificationskVA 380V (±5%) 50 Hz / 60 Hz380* ※ 與製造商聯繫 Contact with us, please .塔身節 Mast 臂長Jib length A (m)B (m)C (m) H (m)H205BL1-225 1930.5134 >134* L3-419 1324.5塔身節Mast 臂長 Jib lengthH1 (m) A (m) P (t) R (t) X (m)Y (m)H205BL1※ 12-18※※ 3.28 2.40L2 ※ ※ ※ 3.28 2.40L3 ※ ※ ※ 3.28 2.40L4※※※3.282.40。
动臂塔式起重机的动态特性及其影响分析_崔少杰
8 3.213 1 3.213 5 3.214 6 3.214 9 3.213 3.208 5 0.20
α
β
A 型架
x
x
平衡臂
塔身
塔身截面
z
塔身 y
z
x
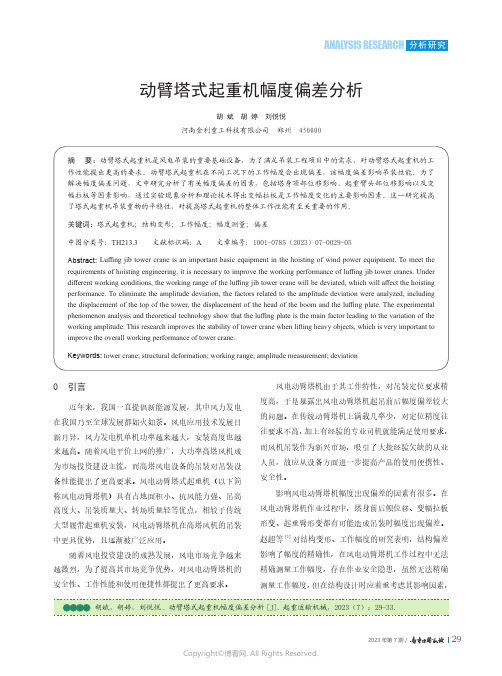
图 1 动臂塔式起重机有限元模型
该动臂塔机最大独立高度工况下塔身包括 2 节加 强节和 7 节标准节,尺寸均为 2.4 m×2.4 m×6 m,弦杆 采用尺寸为 350 mm×350 mm 宽翼缘 H 型钢, 横腹杆 和斜腹杆分别采用尺寸为 L 200 mm×18 mm 和 L 180 mm×16 mm 的等边角钢, 起重臂为 4 节变截面桁架结 构,总长度为 48 m,两节中间节截面为正方形,边长为 2 m, 弦杆和腹杆分别采用尺寸为 准159 mm×7 mm 和 准63 mm×4 mm 的 钢 管 , 平 衡 臂 弦 杆 采 用 尺 寸 为 900 mm×300 mm 窄 翼 缘 H 型 钢 ,A 型 架 也 采 用 宽 翼 缘 H 型钢。 材料均选用钢,弹性模量为 E=210 GPa,泊松比 为 0.28。
* 收稿日期:2014-10-16;修订日期:2014-12-25 基金项目:河北省科学技术研究与发展计划资助项目(11205193D)
2015 年 2 月
崔少杰,等:动臂塔式起重机的动态特性及其影响分析
67
重力矩为 7 500 kN·m。
拉索 A 型架
平衡臂
起重臂
y 起重臂
起重臂在塔身 截面内的投影
图 2 动臂塔机起重臂仰角 α 和回转角 β 示意图
由上述分析可知, 动臂塔机的动态特性是起重 臂仰角 α 和回转角 β 的连续函数, 当起重臂仰角 α 变 化 范 围 为 20.4°~85°、回 转 角 β 变 化 范 围 为 0°~45° 时 , 选 取 起 重 臂 仰 角 α 值 等 于 20.4° ,33.5° ,47.4° , 58.6°,71.8°,85°共 6 个 点(中间 4 个点 分别对应幅 度 40 m,32.5 m,25 m,15 m), 取 起 重 臂 回 转 角 β 值 等 于 0°,10° ,20° ,30° ,40° ,45° 共 6 个 点 进 行 数 值 计 算 (其他点的结果可通过插值计算得到)。 另外,由于高 阶模态对结构动态响应的影响很小, 故只提取低阶 模态。 分别计算了 4 种组合工况下动臂塔机的前 8 阶固有频率:
基于Ansys柔性附着动臂塔式起重机起升激励载荷响应分析
图 1 柔性附着动臂塔机有限元模型
F 1 ()=
得:
t 0t] ∈[ , ‘
() 2
2 当 t [ : 时 ,由 牛 顿 第 二 定 律 可 ) ∈ t,t]
-
2
柏∞ ∞ 0
6
代 入式 ( )得 : 1
时 间/ s
图 4 吊点处 Y向位移响应曲线
) =
一
+m ∈[1t] g -, t 2
() 8
经 推导 ,得 到瞬 态起升 载荷 与时 间 的关 系式 :
g 暑
『
£ o' ] ∈E f 1
_一一t it(1 一 I。t ¨ ) + ( 2 … ) t —
吊重离 地 瞬 间 开 始 ,到 起 吊重 物 上 升 速 度 到额 定
扭转 刚度的空间梁单元 B a 18进行建模 。质量 em 8
单 元选用 了具有 1节 点 6 自由度 的 3 Mas1 ( D s 2 沿
起 升速 度 为 止 ,在 此 过 程 中系 统 中所 有 质 量 都 参
与 运动 ,且 系统处 于 自由振动 状态 [ 。 4 ]
将式 ( )代人式 ( ) 4 6 ,可得 :
《 起重运输机械》 2 1 (O 02 1 )
1 一 4
2 0 0
(2 = t) 联立 方程 可 以解 得 :
+
—
g
() 7
—
O
m
2 O 0
g
一
2 my
一 ’
2mv t
移动载荷作用下塔式起重机动态响应数值模拟

DOI:10.16661/ki.1672-3791.2210-5042-8358移动载荷作用下塔式起重机动态响应数值模拟(江苏师范大学机电工程学院 江苏徐州 221116)摘要:塔式起重机工作中载荷的运动容易引起整机的振动,持续的振动会造成结构的疲劳损伤。
为研究移动载荷作用下塔式起重机起重臂的振动特性,建立了移动载荷模型,将变幅小车和货物等效为移动集中力,采用瞬态动力分析方法,模拟得到了在变幅运动和起升运动工况下起重臂的振动特性。
结果表明:变幅移动速度、起重量越大,臂端振动幅度也越大。
起升速度、起升重量、起升位置对振动幅值、频率均有影响,起升位置距离起重臂臂根部越远,振动挠度、幅值和周期越大。
关键词:塔式起重机 移动载荷 动态响应 数值模拟中图分类号:TU312文献标识码:A 文章编号:1672-3791(2023)11-0083-05Numerical Simulation of the Dynamic Response of the TowerCrane under the Action of Moving Loads*XU WanliWENG Yunhan WEN Jie JIANG Hongqi(School of Mechatronic Engineering, Jiangsu Normal University, Xuzhou, Jiangsu Province, 221116 China)Abstract:The movement of the load in the operation of the tower crane is easy to cause the vibration of the wholecane, and the continuous vibration will cause fatigue damages to the structure. In order to study the vibration char‐acteristics of the jib of the tower crane under the action of moving loads, a moving load model is established, whichequivalents the luffing trolley and cargo as the moving concentration force, and uses the transient dynamic analysismethod to simulate the vibration characteristics of the jib under the conditions of luffing motion and lifting motion.Results show that the greater the luffing moving speed and lifting weight are, the greater the vibration amplitude ofthe end of the jib is, the lifting speed, lifting weight and lifting position have influence on vibration amplitude andfrequency, and that the farther the lifting position from the root of the jib is, the greater the vibration deflection,amplitude and cycle are.Key Words: Tower crane; Moving load; Dynamic response; Numerical simulation塔式起重机是通过变幅机构的运动来完成货物运输工作的一种建筑机械装备,具有适应范围广、转弯半基金项目:江苏师范大学大学生创新创业训练项目(项目编号:XSJCX11045)。
塔式起重机疲劳寿命分析及检验研究

塔式起重机疲劳寿命分析及检验研究发布时间:2022-12-29T02:10:26.810Z 来源:《科学与技术》2022年17期作者:王耀黄炎宁方文权[导读] 塔式起重机(塔吊)在不同程度的负荷作用下持续长久的运行,会因疲劳破坏导致结构出现损坏。
王耀黄炎宁方文权浙江省特种设备科学研究院浙江杭州 310020摘要:塔式起重机(塔吊)在不同程度的负荷作用下持续长久的运行,会因疲劳破坏导致结构出现损坏。
本次研究主要围绕塔吊长时间运行中产生的疲劳破坏问题,利用ANSYS软件对塔吊展开有限元分析(PEA),根据断裂力学来预测塔吊疲劳寿命,结果显示:塔吊的吊臂最容易产生疲劳破坏,本次研究针对型号为QP6013塔吊的疲劳裂纹扩展寿命预测是1.566×106次,裂纹尺寸在1厘米以下时较为安全,这对塔吊的检验有一定参考价值。
关键词:塔式起重机;疲劳使命;PEA;检验塔吊通常是桁架结构,屡见不鲜的塔吊倾倒事故,大多是因为其不断超负荷运行使连接焊缝处发生疲劳破坏导致。
疲劳破坏中的裂纹问题最为严重,若初形成的裂纹在塔吊使用初没有得到检验和重视,裂纹会不断延伸,直至出现脆性断裂,从而引发重大安全事故。
所以针对塔吊重点部位的疲劳破坏机理分析、疲劳寿命预测与提出相应的检验对策是当前迫切需要解决的问题。
1 QP6013型塔吊的有限元分析1.1 模型构建塔吊是建筑工地最常见的起重设备,其重要组成部分有:塔身、吊臂、平衡臂架、小车等,在利用ANSYS软件建模时,简化处理不太产生影响的结构,以防止单位连接与约束复杂问题。
该塔吊属于桁架结构,有三条拉索连接吊臂,底座可顺着轨道移动。
支撑桁架与吊臂桁架都是由桁架元构成。
前者的桁架元是(200cm×200cm×200cm)的正方体。
后者的桁架元是(200cm×200cm×200cm)的四棱锥体。
底座是(300cm×300cm×200cm)的长方体桁架元。
塔式起重机的负荷限制和曲线图解读
塔式起重机的负荷限制和曲线图解读摘要:塔式起重机作为一种常见的起重设备,在建筑工地和其他工程项目中被广泛使用。
为了确保施工安全和设备正常运行,了解塔式起重机的负荷限制是非常重要的。
负荷限制通常由制造商提供,并以曲线图的形式展示。
本文将介绍塔式起重机的负荷限制和如何解读相关的曲线图。
关键词:塔式起重机;负荷限制;曲线图解读;引言塔式起重机是现代企业中常见的吊装设备,广泛用于建筑工地和其他工程项目中。
在使用塔式起重机进行吊装作业时,了解和掌握其负荷限制和曲线图是非常重要的,可以确保工作的安全和高效。
1塔式起重机的负荷限制1.1静态负荷限制塔式起重机的静态负荷限制是指在塔式起重机稳定的情况下,能够承受的最大负荷。
静态负荷限制是基于起重机的结构和设计参数进行计算的。
这些参数包括塔身的高度、主臂和副臂的长度、吊钩的高度等。
制造商通常会提供起重机的静态负荷限制表,以便操作人员在使用起重机时能够准确了解其负荷能力。
静态负荷限制的计算基于一系列因素,如结构强度、危险因素安全系数等。
起重机的设计和组装必须符合国家和行业标准,以确保塔式起重机能够承受设计负荷。
1.2动态负荷限制塔式起重机的动态负荷限制是指在运行状态下,能够承受的最大负荷。
与静态负荷限制不同,动态负荷限制考虑了起重机的运行速度、加速度和减速度等因素。
在实际操作中,起重机在吊装物体时会出现加速和减速的过程,这时候会产生额外的负荷。
因此,动态负荷限制通常要小于静态负荷限制,以确保起重机在运行过程中的稳定性和安全性。
动态负荷限制的计算需要考虑起重机的工作范围和运行条件。
操作人员必须了解起重机的工作速度和加减速度,并根据实际情况选择适当的负荷限制。
1.3提升高度对负荷限制的影响塔式起重机的负荷限制还受到提升高度的影响。
随着起重机的提升高度增加,其负荷限制会逐渐减小。
这是因为随着提升高度的增加,起重机的倾覆力矩和吊钩的有效荷载减小。
倾覆力矩是指起重机在提升过程中由于重心偏移而产生的力矩,会对起重机的稳定性产生影响。
塔式起重机性能试验报告

[转载]塔式起重机性能试验报告(2011-07-03 19:16:25)原文地址:塔式起重机性能试验报告作者:中国塔吊1 主题内容与适用范围本标准规定了检验塔式起重机技术性能和技术要求的试验规范和程序。
本标准适用于轨道式、自升式和固定式塔式起重机(以下简称起重机)。
2 引用标准GB 5144 塔式起重机安全规程GB 9462 塔式起重机技术条件GB 10057 塔式起重机检验规则ZB J80 012 塔式起重机操作使用规程3 试验准备3.1 试验样机3.1.1 生产单位应提供与起重机配套的机械、电气设备的检验数据、记录和合格证。
3.1.2 试验样机应装配完备,调试合格。
在试验过程中不允许修配或更换零部件。
3.1.3 试验样机应为设计规定的标准基本机型。
3.2 仪器、设备3.2.1 试验用的仪器、设备均应具有产品合格证,而且应是在检定周期内已检定合格的,方可使用。
其性能和精度应满足测量的要求。
3.2.2 试验载荷的质量与其标定值的误差不大于1%。
3.3 试验条件3.3.1 试验场地应坚实、平整,轨道和基础等应符合GB 5144、GB 9462、ZB J80 012的有关规定。
3.3.2 试验环境温度应为-15~+40℃,风速不超过8.3 m/s,速度测试时风速不超过3 m/s。
3.3.3 试验轨道式塔式起重机时,试验场地的平面倾斜度不得大于0.5%。
3.3.4 试验期间,应按照使用说明书在试验前进行班前保养。
3.3.5 检查必备的技术文件,应符合GB 10057的规定。
3.3.6 电源电压误差为额定电压值的±5%。
3.3.7 参加起重机试验的司机及指挥人员,必须符合ZB J80 012的有关规定。
4 试验项目与要求进行各项试验时,试验顺序可根据试验场地、条件等具体情况,在不影响试验结果的条件下适当更改。
4.1 试验项目a.安装、拆卸试验;b.绝缘试验;c.空载试验;d.载荷试验;e.整体拖运试验。
211136489_动臂塔式起重机幅度偏差分析
动臂塔式起重机幅度偏差分析胡 斌 胡 婷 刘悦悦河南金利重工科技有限公司 郑州 450000摘 要:动臂塔式起重机是风电吊装的重要基础设备,为了满足吊装工程项目中的需求,对动臂塔式起重机的工作性能提出更高的要求。
动臂塔式起重机在不同工况下的工作幅度会出现偏差,该幅度偏差影响吊装性能。
为了解决幅度偏差问题,文中研究分析了有关幅度偏差的因素,包括塔身顶部位移影响、起重臂头部位移影响以及变幅拉板等因素影响,通过实验现象分析和理论技术得出变幅拉板是工作幅度变化的主要影响因素。
这一研究提高了塔式起重机吊装重物的平稳性,对提高塔式起重机的整体工作性能有至关重要的作用。
关键词:塔式起重机;结构变形;工作幅度;幅度测量;偏差中图分类号:TH213.3 文献标识码:A 文章编号:1001-0785(2023)07-0029-05Abstract: Luffing jib tower crane is an important basic equipment in the hoisting of wind power equipment. To meet the requirements of hoisting engineering, it is necessary to improve the working performance of luffing jib tower cranes. Under different working conditions, the working range of the luffing jib tower crane will be deviated, which will affect the hoisting performance. To eliminate the amplitude deviation, the factors related to the amplitude deviation were analyzed, including the displacement of the top of the tower, the displacement of the head of the boom and the luffing plate. The experimental phenomenon analysis and theoretical technology show that the luffing plate is the main factor leading to the variation of the working amplitude. This research improves the stability of tower crane when lifting heavy objects, which is very important to improve the overall working performance of tower crane.Keywords:tower crane; structural deformation; working range; amplitude measurement; deviation0 引言近年来,我国一直提倡新能源发展,其中风力发电在我国乃至全球发展都如火如荼。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专题研究
SPECIAL RESEARCH
98
动臂塔式起重机起重性能曲线研究
高顺德1,崔丹丹1,滕儒民1,黄群2,喻乐康2,付英雄2
(1.大连理工大学 机械工程学院,辽宁 大连 116024;2.中联重科塔机分公司,湖南 长沙 410205)[摘要] 针对动臂塔式起重机的多种臂长组合方式,详细说明了确定起重性能的3个基本条件及性能曲线绘制的程序设计方法,并通过工程实例验证了该程序的准确性和实用性。
[关键词] 动臂塔式起重机;起重性能;程序设计
[中图分号号] TU61 [文献标识码]B [文章编号]1001-554X(2011)03-0098-04
Study of lifting performance curve for tower crane with luffi ng boom
GAO Shun -de , CUI Dan -dan, TENG Ru -min, HUANG Qun, YU Le -kang, FU Ying -xiong
动臂塔式起重机通常有多种臂长组合方式以适应不同的工作条件,每种臂长组合方式都对应不同的起重性能,如果采用手工试算方式来确定不同工况的起重性能曲线,不仅工作量大而且精确度低。
本文从动臂塔机的设计思路出发,详细说明了确定其起重性能的3个基本条件,并编制了动臂塔机辅助设计程序以绘制性能曲线,通过程序缩短了设计周期,提高了设计效率和精度,
也在设计上提高了起重机的安全性。
图1 动臂塔式起重机
1 确定动臂塔式起重机起重性能的基本条件
进行动臂塔式起重机(见图1)设计时,首先根据设计的主要性能参数,如最大起重量及其工作幅度、最大工作幅度及相应起重量等,对结构进行整体受力分析,确定其上部结构主要部件(臂架、A 型架)的结构尺寸,再进行各机构的选型,确定转台的布局,最后由头部载荷(垂直载荷和力矩 )
进行回转支承的选型;然后以符合该结构为前提,确定其它工作幅度下对应的起重量,并绘制起重性能曲线,最后由各工况下的最大头部载荷来进行塔身的结构设计。
按照这个设计思路,决定动臂塔机起重性能的因素有多种,本文主要考虑对动臂塔机整体受力影响较大的3个基本条件:受力构件强度和稳定性决定的起重性能;臂架稳定性和刚度决定的起重性能;回转支承的承载力决定的起重性能。
具体计算内容见表1所示。
表1 动臂塔机起重性能计算准则计算准则计算内容受力构件强度和稳定性
决定的起重性能
A 型架前撑杆的稳定性A 型架后撑杆的强度钢丝绳的计算安全系数臂架稳定性和刚度决定的起重性能
臂架的整体稳定性
臂架各危险截面的稳定性
臂架的弦杆单肢稳定性臂架腹杆稳定性臂架刚度
回转支承的承载力决定的起重性能
轴向载荷倾覆力矩
[收稿日期] 2010-12-06
[通讯地址]崔丹丹,辽宁省大连市甘井子区凌工路2号
99
2011.03(上)
2 起重性能的程序计算方法
根据上述3个计算准则,可以编制起重性能计算程序,提高设计效率和准确度。
2.1 程序流程
可以采用循环迭代法进行起重性能的试算,其流程图如图2所示。
设幅度为b 、起重量为Q 、臂长为L,则臂架
的仰角为
L
b
a arccos =。
由于臂架最短、幅度最小时,起重量为最大,所以把b min 、L min 、Q max 作为迭代的初始值,令X 0=(b min ,L min ),Y 00=Q max 。
则
式中 b Δ——设定的一整数;
L Δ——中间节长度。
判断Y 10是否满足3个计算准则。
如不满足,则
X 1不变,令Y 112
20
max ×+=Q ,再次代入计算。
如满足,
则判断(额定值-各准则计算所得结果)<][i Δ是否成立,若成立,Y 11就是该幅度和臂长下对应的起重量;若不成立,令
,再次代入
计算。
最后得到一定幅度、臂长下对应的起重量,取该幅度和臂长下,根据3个计算准则算得的最小起重量即为最终的起重量。
2.2 程序系统功能的实现
该起重性能计算程序采用VB 编程语言,可以分为以下几个模块:
(1)公共模块:把公用函数写入该模块中,供其它模块调用。
系统结构图如图3所示。
(2)初始设置模块:该模块用于获取用户设定的工作路径,并把初始参数文件canshu.ini拷入用户工作目录。
弹出“新建工程”时,加载初始参数文件;把用户输入的参数值存放到全局变量数组Initial_Value( )、 Location_Value ( )中。
系统结构图如图4所示。
(3)平衡配重计算模块:该模块用于计算各臂长组合对应的拉板长度和平衡配重,把结果显示在DataGrid 控件中,并写入result.ini 文件中存入用户工作目录下的setting 文件夹。
系统结构图如
图5所示。
bound_num—存放臂长值的L_Value()一维数组的下标,数据
类型integer;QQ(10000, 3)—存放迭代法计算出的起重量的临时二维静态数组,数据类型single;ε—一个极小的正数,数据类型single ;q —一个极小的正数,数据类型single
图2 起重性能循环迭代算法流程图
图3 公共模块系统结构图
(4)载荷参数输入模块:该模块获取构件受力、结构校核及倾覆力矩计算时需要的用户输入参数,把参数值分别存放到全局数组变量Load_Value ( )、Stress_Value ( )、Moment_Value ( )中。
专题研究
SPECIAL RESEARCH
100
图4 初始设置模块系统结构图
(5)起重性能计算模块:该模块用于计算所有臂长的起重性能,把结果显示在DataGrid 控件中,并写入“总起重性能表”,用户可选择某一臂长查看该臂长对应的起重性能曲线。
系统结构图如图6所示。
3 算例
为了验证程序的可靠性和实用性,本文以大连理工大学机械工程学院与中联重科联合开发的TCR6055-32动臂塔式起重机为例,应用该动臂塔机辅助设计程序,绘制了7种臂长组合下的起重性能曲线。
TCR6055-32动臂塔机的臂长组合方式见表2
所示。
图5
平衡配重计算模块系统结构图
图6 起重性能计算模块系统结构图
表2 TCR6055-32动臂塔机的臂长组合方式组合方式1234567臂长/m
30.8
36
41.2
46.4
51.6
56.8
62
应用该辅助设计程序,通过用户界面的方式输入初始设计参数,由程序循环迭代分别求出上述7种
臂长组合下对应的起重性能,得到7组对应的性能曲线,例如41.2m 臂长的起重性能曲线如图7所示。
4 结论
(1)从动臂塔式起重机的设计思路出发,详
101
2011.03(上)
图7 41.2m 臂长对应的起重性能曲线
细说明了确定起重性能的3个基本条件,该准则不仅适用于动臂塔机,而且可以推广到所有的同类产
品,例如海洋平台起重机、履带起重机的主臂工况,具有通用性。
(2)详细阐述了程序的设计流程和功能实现方式,起重性能程序的编制提高了计算精度并节省了大量手工试算时间,已应用到TCR6055-32动臂塔式起重机的实际设计中,该塔机通过了国家验证,说明了该程序的准确性和实用性。
[参考文献]
[1]李华飚,毕宗睿,李水根.Visual Basic 数据库编程.北
京:人民邮电出版社,2004.
[2]龚沛曾,陆慰民,杨志强.Visual Basic程序设计简明教
程.北京:高等教育出版社
,2003.。