跟踪算法简单小结
纯追踪算法原理

纯追踪算法原理
纯追踪算法是一种用于物体跟踪的算法。
它通过对物体的移动轨迹
进行追踪,确定其之后的位置,并不断更新跟踪结果,实现对物体的
稳定追踪。
纯追踪算法主要包括以下几个步骤:
1. 初始目标定位:选择所要跟踪的目标,并利用图像处理技术找到目
标在图像中的位置。
2. 运动预测:利用物体的运动状态、速度和方向等信息,对其下一时
刻的位置进行预测。
3. 剔除虚假目标:通过对目标进行验证,剔除掉一些虚假目标,防止
追踪结果的误差增加。
4. 确定跟踪窗口:根据目标的运动规律和速度等信息,确定跟踪窗口
的大小和位置。
5. 追踪参数更新:根据物体的运动状态和窗口中的像素值变化情况,
更新跟踪算法的参数值。
6. 跟踪结果输出:输出目标的位置和速度等信息,实现对物体的跟踪。
纯追踪算法在物体跟踪方面具有很大的优势。
它可以对具有连续运动
的物体进行有效跟踪,并能够在目标运动状态发生改变时及时更新跟
踪结果。
此外,还可以对多个目标进行同时跟踪,实现多目标追踪。
需要注意的是,纯追踪算法在某些情况下可能会出现跟踪失败的情况,例如目标速度过快、光照变化等。
因此,需要根据实际情况选择合适
的跟踪算法,并进行参数优化和错误处理,以确保跟踪结果的准确性
和稳定性。
内边界跟踪、外边界跟踪的算法

内边界跟踪和外边界跟踪是图像处理中常用的算法,它们在物体识别、图像分析、目标跟踪等方面具有重要的应用价值。
本文将从算法原理、应用领域和优缺点等方面对内边界跟踪和外边界跟踪进行简要介绍,以期为读者提供全面的了解。
一、内边界跟踪算法内边界跟踪算法是一种用于提取目标内部边界的图像处理算法。
其主要原理是从目标的内部开始,沿着边缘像素依次跟踪,直至回到起点。
常用的内边界跟踪算法包括基于链码的跟踪算法和基于边缘检测的跟踪算法。
1.1 基于链码的内边界跟踪算法基于链码的内边界跟踪算法是一种以目标内部边界像素为起点,按照像素相邻关系依次跟踪的算法。
其核心思想是用一系列数字码来表示像素之间的连续关系,从而构建目标的内部边界路径。
常见的链码编码方式包括4连通链码和8连通链码,分别适用于4邻域和8邻域的像素跟踪。
链码编码具有简洁高效的特点,适用于快速提取目标内部边界。
1.2 基于边缘检测的内边界跟踪算法基于边缘检测的内边界跟踪算法是一种在边缘检测的基础上进行跟踪的算法。
其主要步骤包括对目标进行边缘检测,然后从边缘像素出发进行跟踪,最终得到目标的内部边界路径。
常用的边缘检测算法包括Sobel算子、Canny算子等,它们能够有效提取目标的边缘信息,为内边界跟踪提供了可靠的输入数据。
二、外边界跟踪算法外边界跟踪算法是一种以目标外部边界为起点,沿着边缘像素逐步跟踪的图像处理算法。
其主要原理是从目标的外部开始,按照像素相邻关系逐步跟踪,直至回到起点。
常用的外边界跟踪算法包括基于边缘填充的跟踪算法和基于边缘内外关系的跟踪算法。
2.1 基于边缘填充的外边界跟踪算法基于边缘填充的外边界跟踪算法是一种在目标外部进行像素填充,然后从填充后的边缘像素开始进行跟踪的算法。
其核心思想是通过填充操作将目标的外部边界转化为内部边界,从而利用内边界跟踪算法进行处理。
这种方法能够简化外边界跟踪的流程,提高跟踪的准确性和稳定性。
2.2 基于边缘内外关系的外边界跟踪算法基于边缘内外关系的外边界跟踪算法是一种根据目标边缘像素的内外关系进行跟踪的算法。
2011-10-31目标跟踪的算法总结
视频目标跟踪的算法总结:1.Meanshift(均值漂移算法):1975年有Fukunaga提出均值漂移算法是一种基于密度梯度上升的非参数方法,通过迭代运算找到目标位置,实现目标跟踪。
它显著的优点是算法计算量小运算速度快,简单易实现,很适合于实时跟踪场合;缺点是跟踪小目标和快速移动目标时常常失败,而且在全部遮挡情况下不能自我恢复跟踪。
算法步骤:先算出当前点的偏移均值,移动该点到其偏移均值,然后以此为新的起始点,继续移动,直到满足一定的条件结束.下面是MeanShift算法流程图:Mean Shift 算法流程图2.CamShift跟踪算法:它是MeanShift算法的改进,连续自适应的MeanShift算法,CamShift算法的全称是"Continuously Adaptive Mean-SHIFT",它的基本思想是视频图像的所有帧作MeanShift运算,并将上一帧的结果(即Search Window的中心和大小)作为下一帧MeanShift算法的Search Window的初始值,如此迭代下去。
Camshift 关键就在于当目标的大小发生改变的时候,此算法可以自适应调整目标区域继续跟踪。
对于OPENCV中的CAMSHIFT例子,是通过计算目标HSV空间下的HUE分量直方图,通过直方图反向投影得到目标像素的概率分布,然后通过调用CV库中的CAMSHIFT算法,自动跟踪并调整目标窗口的中心位置与大小。
3.粒子滤波跟踪算法:优点:粒子滤波具有很强鲁棒性即抗遮挡能力强,可并行缺点:粒子滤波需要大量的样本的后验概率,计算量大和退化现象等缺陷是粒子滤波的瓶颈。
粒子滤波在视频跟踪上被称为凝聚算法(CONDENsATION)。
4.Kalman Filter(卡尔曼滤波算法):Dr Kalman提出Kalman Filter 算法实时性强,但抗遮挡能力弱。
现在跟踪算法的发展趋势:一种算法的单独改进,对于Meanshift算法基本上是改进其核函数和巴氏距离,其效果不是很有效。
Tracking-Learning-Detection(TLD算法总结)
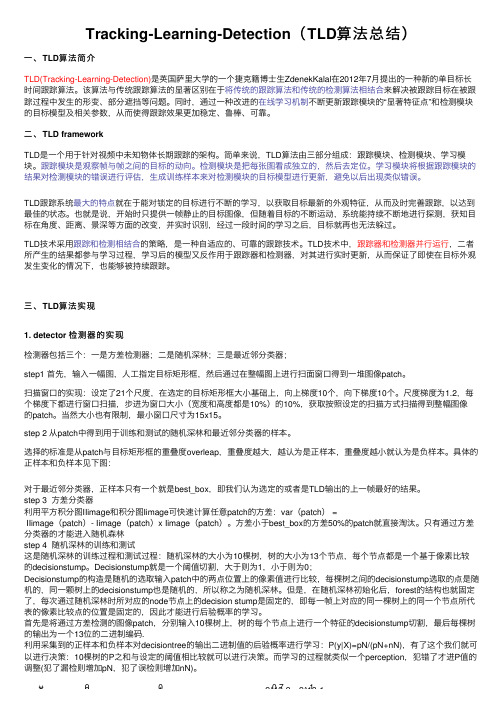
Tracking-Learning-Detection(TLD算法总结)⼀、TLD算法简介TLD(Tracking-Learning-Detection)是英国萨⾥⼤学的⼀个捷克籍博⼠⽣ZdenekKalal在2012年7⽉提出的⼀种新的单⽬标长时间跟踪算法。
该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪⽬标在被跟踪过程中发⽣的形变、部分遮挡等问题。
同时,通过⼀种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的⽬标模型及相关参数,从⽽使得跟踪效果更加稳定、鲁棒、可靠。
⼆、TLD frameworkTLD是⼀个⽤于针对视频中未知物体长期跟踪的架构。
简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块。
跟踪模块是观察帧与帧之间的⽬标的动向。
检测模块是把每张图看成独⽴的,然后去定位。
学习模块将根据跟踪模块的结果对检测模块的错误进⾏评估,⽣成训练样本来对检测模块的⽬标模型进⾏更新,避免以后出现类似错误。
TLD跟踪系统最⼤的特点就在于能对锁定的⽬标进⾏不断的学习,以获取⽬标最新的外观特征,从⽽及时完善跟踪,以达到最佳的状态。
也就是说,开始时只提供⼀帧静⽌的⽬标图像,但随着⽬标的不断运动,系统能持续不断地进⾏探测,获知⽬标在⾓度、距离、景深等⽅⾯的改变,并实时识别,经过⼀段时间的学习之后,⽬标就再也⽆法躲过。
TLD技术采⽤跟踪和检测相结合的策略,是⼀种⾃适应的、可靠的跟踪技术。
TLD技术中,跟踪器和检测器并⾏运⾏,⼆者所产⽣的结果都参与学习过程,学习后的模型⼜反作⽤于跟踪器和检测器,对其进⾏实时更新,从⽽保证了即使在⽬标外观发⽣变化的情况下,也能够被持续跟踪。
三、TLD算法实现1. detector 检测器的实现检测器包括三个:⼀是⽅差检测器;⼆是随机深林;三是最近邻分类器;step1 ⾸先,输⼊⼀幅图,⼈⼯指定⽬标矩形框,然后通过在整幅图上进⾏扫⾯窗⼝得到⼀堆图像patch。
轨迹跟踪方法总结 -回复

轨迹跟踪方法总结-回复轨迹跟踪是计算机视觉领域中的重要研究方向,它涉及到识别、跟踪和预测目标在连续帧中的位置。
随着计算机技术的发展和硬件的升级,轨迹跟踪方法得到了广泛的应用。
本文将以轨迹跟踪方法为主题,对其进行总结和回答一些相关问题。
一、轨迹跟踪方法的分类轨迹跟踪方法可以分为传统方法和深度学习方法两大类。
1. 传统方法传统的轨迹跟踪方法通常基于特征工程和机器学习方法。
其中,特征工程指的是从图像或视频帧中提取有用的特征,如颜色、纹理、形状等。
机器学习方法包括分类器、回归器等,其主要作用是通过学习已有的轨迹样本,预测目标的位置。
常见的传统方法包括基于卡尔曼滤波器的轨迹跟踪方法、粒子滤波器、CAMShift、Meanshift等。
这些方法在不同的场景和任务中有着各自的优势和适用性。
2. 深度学习方法近年来,深度学习方法在计算机视觉领域取得了巨大的进展,也在轨迹跟踪中得到了广泛的应用。
深度学习方法通过神经网络模型学习图像的特征表示,从而实现轨迹跟踪任务。
深度学习方法可以分为两类:基于框架的方法和端到端的方法。
基于框架的方法包括Faster R-CNN、YOLO等,其主要思想是通过在图像中检测出目标的位置,再进行跟踪。
端到端的方法则是直接学习目标的轨迹,如Siamese网络、MDNet等。
二、轨迹跟踪方法的关键技术无论是传统方法还是深度学习方法,轨迹跟踪中都涉及到一些关键技术。
1. 目标检测目标检测是轨迹跟踪的第一步,其作用是在图像或视频帧中准确定位目标的位置。
常用的目标检测方法包括基于特征的方法(如HOG、SIFT等)和基于深度学习的方法(如Faster R-CNN、YOLO等)。
2. 特征提取特征提取是轨迹跟踪中的关键步骤,其目标是将图像或视频帧中的目标转换为具有区分性的特征表示。
常用的特征提取方法包括传统的手工设计特征和深度学习方法。
3. 目标跟踪目标跟踪是轨迹跟踪的核心任务,其主要目标是在连续帧中预测目标的位置。
跟踪算法
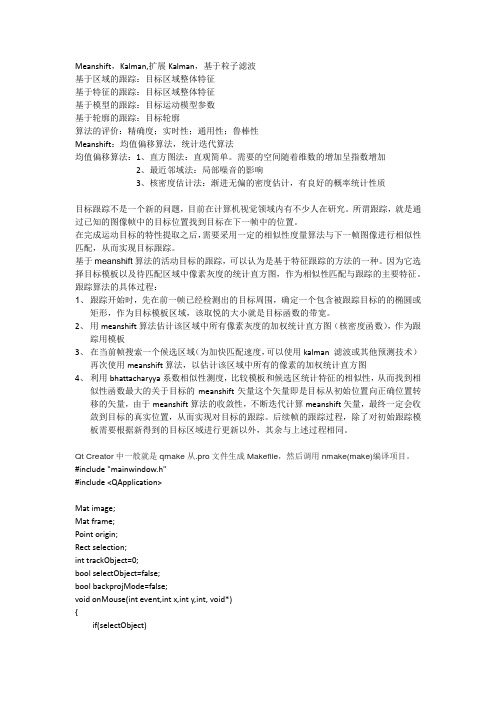
Meanshift,Kalman,扩展Kalman,基于粒子滤波基于区域的跟踪:目标区域整体特征基于特征的跟踪:目标区域整体特征基于模型的跟踪:目标运动模型参数基于轮廓的跟踪:目标轮廓算法的评价:精确度;实时性;通用性;鲁棒性Meanshift:均值偏移算法,统计迭代算法均值偏移算法:1、直方图法:直观简单。
需要的空间随着维数的增加呈指数增加2、最近邻域法:局部噪音的影响3、核密度估计法:渐进无偏的密度估计,有良好的概率统计性质目标跟踪不是一个新的问题,目前在计算机视觉领域内有不少人在研究。
所谓跟踪,就是通过已知的图像帧中的目标位置找到目标在下一帧中的位置。
在完成运动目标的特性提取之后,需要采用一定的相似性度量算法与下一帧图像进行相似性匹配,从而实现目标跟踪。
基于meanshift算法的活动目标的跟踪,可以认为是基于特征跟踪的方法的一种。
因为它选择目标模板以及待匹配区域中像素灰度的统计直方图,作为相似性匹配与跟踪的主要特征。
跟踪算法的具体过程:1、跟踪开始时,先在前一帧已经检测出的目标周围,确定一个包含被跟踪目标的的椭圆或矩形,作为目标模板区域,该取悦的大小就是目标函数的带宽。
2、用meanshift算法估计该区域中所有像素灰度的加权统计直方图(核密度函数),作为跟踪用模板3、在当前帧搜索一个候选区域(为加快匹配速度,可以使用kalman 滤波或其他预测技术)再次使用meanshift算法,以估计该区域中所有的像素的加权统计直方图4、利用bhattacharyya系数相似性测度,比较模板和候选区统计特征的相似性,从而找到相似性函数最大的关于目标的meanshift矢量这个矢量即是目标从初始位置向正确位置转移的矢量,由于meanshift算法的收敛性,不断迭代计算meanshift矢量,最终一定会收敛到目标的真实位置,从而实现对目标的跟踪。
后续帧的跟踪过程,除了对初始跟踪模板需要根据新得到的目标区域进行更新以外,其余与上述过程相同。
算法使用的跟踪与监控方法

算法使用的跟踪与监控方法随着人工智能和大数据技术的快速发展,算法在各个领域的应用越来越广泛。
然而,算法的使用也带来了一些问题,例如算法的不可解释性、数据隐私的泄露等。
为了确保算法的正确性和安全性,跟踪与监控算法的使用变得至关重要。
本文将探讨算法使用的跟踪与监控方法。
一、算法使用的跟踪方法1. 数据记录与分析跟踪算法的使用首先需要对算法的输入和输出数据进行记录和分析。
通过记录算法的输入数据,可以了解算法的使用情况和数据的来源,从而判断算法是否被滥用或误用。
同时,记录算法的输出数据可以评估算法的性能和效果。
这些数据可以通过数据分析技术,如数据挖掘和机器学习算法,进行进一步的分析和预测。
2. 日志记录与审计除了记录数据,还可以通过日志记录和审计来跟踪算法的使用。
日志记录可以记录算法的调用过程、参数设置和运行状态等信息,以便后续的分析和排查问题。
审计则可以对算法的使用进行监督和检查,确保算法的合规性和安全性。
3. 用户反馈与评价用户反馈与评价也是跟踪算法使用的重要方法之一。
通过与用户的交流和反馈,可以了解用户对算法的使用体验和效果的评价。
这些反馈和评价可以作为改进算法的依据,同时也可以发现潜在的问题和风险。
二、算法使用的监控方法1. 监控算法性能监控算法的性能是确保算法正常运行的关键。
可以通过监控算法的运行时间、内存占用、计算资源利用率等指标来评估算法的性能。
如果算法的性能出现异常,可以及时发现并采取相应的措施,如优化算法代码、增加计算资源等。
2. 监控算法的输出除了监控算法的性能,还需要监控算法的输出。
对于一些关键的输出结果,可以设置阈值或规则进行监控,当输出结果超出预期范围时,及时发出警报。
这样可以避免因算法输出错误而导致的问题和损失。
3. 监控算法的使用环境算法的使用环境也需要进行监控。
例如,监控算法运行的服务器状态、网络连接情况等。
如果发现使用环境出现异常,可以及时采取措施,避免影响算法的正常运行。
近几年跟踪算法总结
近几年跟踪算法总结跟踪算法在视频处理中至关重要,跟踪即检测到想要的目标对象,并盯住不放。
在近几年出现的算法中,大多是将跟踪与检测相结合,来实现更好的跟踪效果。
在今年的CVPR大会上,更是出现了基于CNN学习的跟踪算法,每种算法各有利弊,具体还要根据实际情况进行取舍。
本文总结了近几年出现的不错的跟踪算法,首先对该算法的特点进行了简单的总结,具体内容及讲解请参看链接中大神的博文。
另外这些算法大多提供了开源的代码和论文,想更进一步的了解还是看原文更给力。
1、KCF(KernelizedCorrelation Filter)是一种Tracking ByDetection的跟踪方法,以跟踪对象为正样本,以周围坏境为负样本,训练一个判别分类器。
之所以能有这么快的速度,得益于作者巧妙地通过循环偏移构建出了分类器的训练样本,从而使得数据矩阵变成了一个循环矩阵。
然后基于循环矩阵的特性把问题的求解变换到了离散傅里叶变换域,从而避免了矩阵求逆的过程,降低了好几个数量级的算法复杂度。
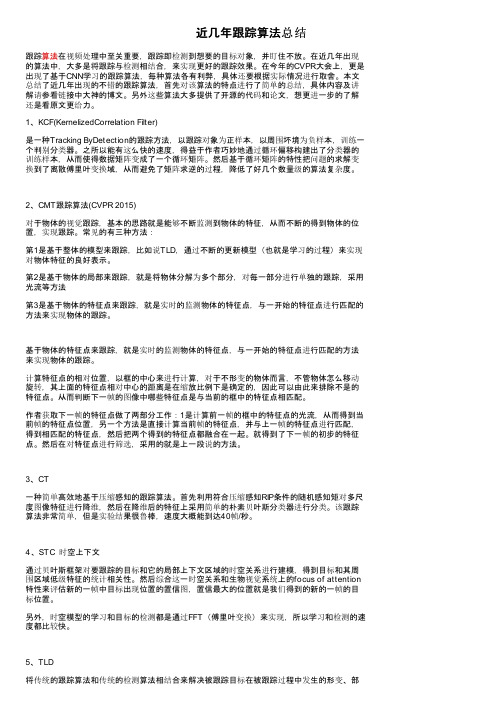
2、CMT跟踪算法(CVPR 2015)对于物体的视觉跟踪,基本的思路就是能够不断监测到物体的特征,从而不断的得到物体的位置,实现跟踪。
常见的有三种方法:第1是基于整体的模型来跟踪,比如说TLD,通过不断的更新模型(也就是学习的过程)来实现对物体特征的良好表示。
第2是基于物体的局部来跟踪,就是将物体分解为多个部分,对每一部分进行单独的跟踪,采用光流等方法第3是基于物体的特征点来跟踪,就是实时的监测物体的特征点,与一开始的特征点进行匹配的方法来实现物体的跟踪。
基于物体的特征点来跟踪,就是实时的监测物体的特征点,与一开始的特征点进行匹配的方法来实现物体的跟踪。
计算特征点的相对位置,以框的中心来进行计算,对于不形变的物体而言,不管物体怎么移动旋转,其上面的特征点相对中心的距离是在缩放比例下是确定的,因此可以由此来排除不是的特征点。
从而判断下一帧的图像中哪些特征点是与当前的框中的特征点相匹配。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
19
跟踪算法思想跟框架
四个模块的组合做成sampling track the appearance model the motion model state representation type observation type
20
该算法把跟踪问题看作贝叶斯概率分布问 题:(跟VTD一样)
9
跟踪算法思想跟框架
针对于appearance and motion changes, 该算法设置了鲁棒性良好的appearance and motion models appearance models:SPCA(sparse PCA) motion models:Gaussian perturbation interactive Markov Chain Monte Carlo(马 尔科夫蒙特卡洛模型)
31
32
跟踪算法思想跟框架
33
本文的正负样本选取:
34
跟踪算法的特色特点(贡献点)
质疑传统的正负样本选取的模式 对于跟踪问题,提供了一个全新的思路(没 get到) SVM是一个很好的分类器(对比于其它分类器, 如boost,它对于噪声的稳健性,明显优于其 它分类器,作者YY的)
35
21
22
State Representation Type
the vertical projection of edge(VPE)
23
Observation Type
Gaussian filter bank(GFB)
24
Appearance Model
SPCA
25
Motion Model
K-Harmonic Means(KHM)
类似k-means的一种聚类方法
26
Sampling track
27初Leabharlann 化目标appearance model
motion model 输入视 频帧
state representation
observation type
SPCA MCMC算权重wt
KHM MCMC算权重wt
10
该算法把跟踪问题看作贝叶斯概率分布问 题:
11
SPCA
有三个特点:1.囊括目标的可能外观 变化 2.紧密性 3.互补性
12
SPCA
13
Gaussian perturbation
对于运动模型建模有两种:smooth,abrupt
14
MCMC( Markov Chain Monte Carlo )
跟踪算法的特色特点(贡献点)
从现实环境出发,提供有效的解决方案(有点 虚) 把现实复杂的目标跟踪问题分解成小模块分析, 加以综合(中肯)
17
VTS(Tracking by Sampling Trackers) 2011iccv
跟踪算法的提出由来及其解决的问题
现实环境的多变性和复杂性是导致跟踪困难的主要原 因:illumination, shape, occlusion, or motion changes(这个跟VTD分析是一样) 批判VTD的不足:在现实环境中,无法确信r个basic appearance model和s个basic motion model的组合 可以应对现实环境的多变性和复杂性,而且硬性固定 模型个数有点死板
4
5
初始化目标 初始化randomized fern 和 supporters 输入视 频帧 用randomized fern检测候选项 (结合模板匹配模型) 针对候选项进行特征点匹配 (support score)
得到跟踪结果 更新randomized fern 和 supporters
6
7
跟踪算法的特色特点(贡献点)
该算法也是一种P-N learning的算法(TLD) 对于跟踪的关注点不一样(行人跟踪) 跟我们系统Supervise监督机制在某些方面有 点类似(上下文信息)
8
VTD (Visual Tracking Decomposition) 2010cvpr
跟踪算法的提出由来及其解决的问题
跟踪算法简单小结
— —CXT,VTD,VTS,struck
1
跟踪算法小结
跟踪算法的提出由来及其解决的问题 跟踪算法思想跟框架 跟踪算法的特色特点(贡献点)
2
CXT( Context Tracker )--2011cvpr
跟踪算法的提出由来及其解决的问题
3
跟踪算法思想跟框架
该算法思想主要有两个重点:distrackers和 supporters distrackers是由randomized ferns classifiers检测得到的 supporters是由Hessian Detector(角点检测) 和surf descriptor构成
15
初始化目标 初始化SPCA 和Gaussian perturbation 输入视 频帧
SPCA算出basic appearance model
Gaussian perturbation算出basic motion model Markov Chain Monte Carlo算 上述模型的权重wt 得到跟踪结 果 更新SPCA 和 Gaussian perturbation
VPE MCMC算权重wt
GFB MCMC算权重wt
得到跟踪结果
更新四模型
28
跟踪算法的特色特点(贡献点)
跟VTD一样 把现实复杂的目标跟踪问题分解成小模块分析, 加以综合
29
Struck(Structured Output Tracking with Kernels) --2011iccv 跟踪算法的提出由来及其解决的问题
该算法提出的由来:现实的跟踪困难主要遇到的问题是 appearance and motion changes 本文appearance and motion changes具体 表现为pose variations , abrupt motions, occlusion , illumination changes
目前普遍跟踪算法看待跟踪问题都是一个分类 问题和模型更新(TLD) 但是这其中存在一个问题:正负样本的选取 (一般都是启发式的选取),这样很难去保证 正负样本训练的分类器的效果 本算法可以有效地解决这个问题(新的框架)
30
对于传统的跟踪算法进行批判
传统算法的分类器训练只是简单上下几帧的图 片进行训练,并没有涉及图片与图片间的转化 关系进行训练 样本在分类器的训练是一样的权重(正与负), 例如同是负样本(覆盖大部分目标和只覆盖一 点点目标)是一样的权重 传统算法的正负样本的选取一般都是启发式的