log算子 和dog 算子
深度学习算法在卷烟外观质量检测中的应用
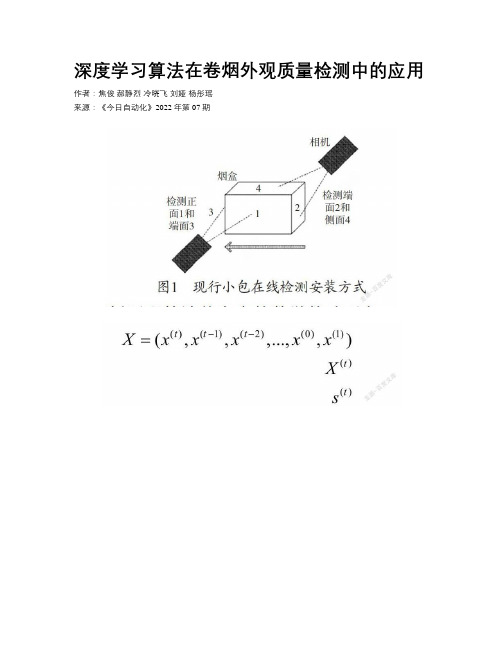
深度学习算法在卷烟外观质量检测中的应用作者:焦俊郝静烈冷晓飞刘娅杨彤瑶来源:《今日自动化》2022年第07期[摘要]烟草行业对于卷烟成品的外观质量具有较高的要求,传统的烟草外观检测办法包括人工目测和传统机器视觉检测,由于卷烟品牌、子品牌日益增多,人工目测工作量剧增,而传统的机器视觉检测需要对每一类产品做标样,不能实现智能化的外观检测。
深度学习检测技术可以显著简化瑕疵检测和缺陷检查,基于样本图像,算法可以训练各种各样的瑕疵和缺陷类型,然后可靠地识别它们。
通过专门设计的卷烟产品传送机械,稳定采集卷烟成品图像,利用改进的深度学习算法进行高效瑕疵判定。
基于深度学习算法的品质检测研究和探索,对于卷烟生产上的众多外观质量检测装置具有重大的指导意义。
[关键词]深度学习;RNN;瑕疵检测;神经元;卷烟;外观质量检测[中图分类号]TP391.41 [文献标志码]A [文章编号]2095–6487(2022)07–0–05Application of Deep Learning in Cigarette Appearance Quality InspectionJiao Jun,Hao Jing-lie,Leng Xiao-fei,Liu Ya,Yang Tong-yao[Abstract][background and objective] the tobacco industry has high requirements for the appearance quality of finished cigarette products. The traditional tobacco appearance inspection methods include manual visual inspection and traditional machine vision inspection. Due to the increasing number of cigarette brands and sub brands, the workload of manual visual inspection has increased sharply. However, the traditional machine vision inspection needs to make standard samples for each kind of products, which can not realize intelligent appearance inspection. [Methods] deep learning detection technology can significantly simplify defect detection and defect inspection. It can be based on sample images. The algorithm can train a variety of defects and defect types, and then identify them reliably. [results] through the specially designed cigarette product transmissionmachinery, the images of finished cigarette products are stably collected, and the improved deep learning algorithm is used for efficient defect judgment [Conclusion] the research and exploration of quality detection based on deep learning algorithm has great guiding significance for many appearance quality detection devices in cigarette production.[Keywords]deep learning; RNN; defect detection; neuron; cigarettes; appearance quality inspection中國烟草十四五规划中提出了按照“形成强大国内市场,构建新发展格局”的总体部署,中式卷烟知名品牌既要在畅通国内大循环、促进国内国际双循环和优化供给结构、改善供给质量中承担更大责任、发挥更大作用,也要通过技术创新、品牌创新、产品创新来更好地满足人民群众日益增长的物质文化需求。
siftsurf检测关键点及描述子

siftsurf检测关键点及描述⼦1、sift介绍SIFT全称Scale-Invariant Feature Transform(尺度不变特征转换)。
它⽤来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe在1999年所发表,2004年完善总结。
SIFT算法分解为如下四步:(1)构建尺度空间搜索所有尺度上的图像位置,通过⾼斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点,具体的过程如下。
A、采⽤⾼斯函数对图像进⾏模糊以及降采样处理得到⾼斯⾦字塔B、采⽤DOG(Difference of Gaussian)即在⾼斯⾦⼦塔中的每组中相邻两层相减(“下⼀层减上⼀层”)⽣成⾼斯差分⾦字塔(2)关键点定位A、找到局部极值点B、剔除极值点通过Taylor展开式(插值函数)精确定位关键点,通过Hessian矩阵消除边缘响应点。
(3)⽅向确定对关键点进⾏梯度计算⽣成梯度直⽅图统计领域内像素的梯度和⽅向,从⽽确定⽅向。
(4)关键点特征描述⼦取特征点周围44个区域块,统计每⼩块内8个梯度⽅向,⽤这448=128维向量作为Sift特征的描述⼦。
2、surf介绍SURF全称Speeded Up Robust Features,为SIFT的加速版本。
它改进了特征的提取和描述⽅式,⽤⼀种更为⾼效的⽅式完成特征的提取和描述。
SURF跟SIFT⼀样分四步⾛:(1)构建尺度空间A、使⽤box filter滤波,然后使⽤Hessian矩阵获取⼆阶梯度特征(相当于LoG算⼦或SIFT⾥的DOG)从左到右分别表⽰在y⽅向LoG算⼦(),xy⽅向的LoG算⼦,y⽅向近似的LoG算⼦,xy⽅向近似的LoG算⼦(2)构建Hessian矩阵塔surf在建塔的时候每层图像⼤⼩不变,只是对模板的尺度不断增⼤,相当于⼀个上采样的过程。
第⼀塔中size分别为,⽽以后每塔中size边长差距逐塔翻倍。
仿射变换
理论中说明了不变量是指物体的特征在经过了如下的一个或几个变换:(1)尺度的缩放;(2)物体的移动;(3)物体的旋转变化;(4)仿射变换;(5)透视变换后,仍然保持不变的特征量。
这是由于视觉不变量是物体几何结构在某个或某些变换群下仍然保持不变的函数形式。
视觉不变量理论中的几个重要变换群有:欧几里德变换群、仿射变换群、射影变换群和拓扑变换群,这几个变换群是逐个包含的,即其他的变换群都是拓扑变换群的特例,并且具有封闭性、恒等性、可逆性和结合性。
一般用齐次矩阵表示变换群,齐次矩阵中未知参数的个数称为变换群的自由度。
自由度的大小可以反映变换群的复杂度和通用度,自由度越大通用程度越强,自由度越小复杂度越低。
上述几种变换变换群依次增大,变换群越大,自由度越大,不变性越少。
相对的,若变换群越小,自由度越小,不变性越多,可提取的不变量也越丰富[9]。
SIFT图像特征的主要计算步骤1)尺度空间极值检测:计算的第一个阶段是搜索所有的尺度和图像位置,使用高斯差分公式可以有效的检测出潜在的特征点,这些特征点对于尺度缩放和旋转变化具有不变性;2)关键点的定位:对于每个候选点,确定他们的位置和尺度;3)确定关键点的方向:为每个关键点分配一个方向,以后所有对图像的数据的操作都被转换为对特征点方向、尺度和位置的操作,从而保证了变化的不变性;4)生成特征点描述子:通过对关键点当前尺度周围区域的梯度统计,生成特征点描述子。
高期尺度空间,高期差分方程D (x ,y ,?)?(G (x ,y ,k ?)?G (x ,y ,?))*I (x ,y )?L (x ,y ,k ?)?L (x ,y,?)高斯差分函数DoG(difference-of-Gaussian)选择高斯差分函数的几个优点:1)计算效率高:由于L对于每个尺度空间都是需要计算的,而D只需在此基础上做减法操作;2)高斯差分函数DoG(difference-of-Gaussian)是尺度归一化算子LoG(Laplacianof Gaussian)的近似,Lindeberg证明具有因子?2的尺度归一化算子LoG对于真正的尺度不变性是必须的。
二阶椭圆微分算子拉普拉斯算子
二阶椭圆微分算子拉普拉斯算子
二阶椭圆微分算子拉普拉斯算子(Laplace Operator)是一种广泛应用于图像处理和
偏微分方程领域的算子。
它既可以应用于欧几里得空间中的梯度(f)的散度(·f)运算,也可以推广到黎曼流形上的椭圆型算子,称为拉普拉斯-贝尔特拉米算子。
在图像处理领域,拉普拉斯算子常用于边缘检测。
其原理是利用拉普拉斯算子对图像进行滤波,从而锐化图像边缘。
拉普拉斯算子主要包括以下几种:
1. 二维拉普拉斯算子:应用于二维图像处理,可以检测图像中的边缘。
常见的二维拉普拉斯算子有Prewitt算子、Sobel算子和Roberts算子等。
2. 三维拉普拉斯算子:应用于三维图像处理,可以检测图像中的边缘。
常见的三维拉普拉斯算子有LoG算子和DoG算子等。
在偏微分方程领域,拉普拉斯算子主要用于求解椭圆型偏微分方程。
拉普拉斯算子对偏微分方程的解具有降维作用,可以将高维问题转化为低维问题求解。
此外,拉普拉斯算子还应用于偏微分方程的数值计算方法,如有限差分法、有限元法等。
总之,二阶椭圆微分算子拉普拉斯算子是一种重要的数学工具,在图像处理和偏微分方程领域具有广泛的应用价值。
基于改进SIFT算法的视频序列图像配准
基于改进SIFT算法的视频序列图像配准汪道寅;胡访宇【摘要】针对尺度不变特征SIFT配准算法中匹配阶段的距离比阈值参数不具有普遍适用性,并且误配点没有得到有效剔除的问题,分别提出了参数自适应和相邻平行性约束的相应改进方法.距离比阈值的参数自适应使得阈值能够对不同的图像进行调整,相邻平行性的约束则进一步减少了误配的特征点对,最终得到更加精确的图像变换关系.将改进后的SIFT算法应用于视频序列图像的配准,实验表明改进算法的性能得到有效提高.【期刊名称】《无线电工程》【年(卷),期】2011(041)002【总页数】4页(P16-18,24)【关键词】SIFT;图像配准;视频序列;参数自适应;相邻平行性约束【作者】汪道寅;胡访宇【作者单位】中国科学技术大学,安徽,合肥,230027;中国科学技术大学,安徽,合肥,230027【正文语种】中文【中图分类】TN391.90 引言图像配准技术是图像融合和图像重建等应用的前提,是不可缺少的关键步骤。
图像配准可分为基于特征和基于区域的配准,其基本步骤为特征检测、特征匹配、匹配函数设计和图像的变换及重采样[1]。
图像配准在医学、遥感和目标识别等众多图像分析领域得到了广泛地应用,是图像处理领域中研究的热点。
尺度不变特征SIFT是由David Lowe于1999年提出,并于2004年总结完善[2]。
SIFT匹配算法主要可分为特征检测、特征描述和特征匹配3个部分。
Mikolajczyk 和 Schmid通过对比 SIFT、PCA-SIFT、Steerable Filter和Moment Invariants 等数10种特征描述后指出[3],SIFT是目前最为有效地特征检测算子。
SIFT算法存在需要完善的地方,如匹配部分的部分阈值参数不具有普遍适用性,并且误配点没有得到有效的剔除。
针对以上问题提出相应改进,并将其应用到视频序列图像的配准当中。
实验表明,改进算法实现了更有效的配准。
SIFT算法实现原理步骤

SIFT 算法实现步骤 :1 关键点检测、2 关键点描述、3 关键点匹配、4 排除错配点参考链接:1关键点检测1.1 成立尺度空间依照文献《Scale-space theory: A basic tool for analysing structures at different scales 》咱们可知,高斯核是唯一能够产生多尺度空间的核,一个图像的尺度空间,L (x,y,σ) ,概念为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
高斯函数高斯金字塔高斯金字塔的构建进程可分为两步:(1)对图像做高斯滑腻;(2)对图像做降采样。
为了让尺度表现其持续性,在简单 下采样的基础上加上了高斯滤波。
一幅图像能够产生几组(octave ) 图像,一组图像包括几层 (interval )图像。
高斯图像金字塔共o 组、s 层, 那么有:σ——尺度空间坐标;s ——sub-level 层坐标;σ0——初始尺度;S ——每组层数(一样为3~5)。
当图像通过相机拍照时,相机的镜头已经对图像进行了一次初始的模糊,因此依照高斯模糊的性质:-第0层尺度高斯金字塔的组数: M 、N 分别为图像的行数和列数高斯金字塔的组内尺度与组间尺度:组内尺度是指同一组(octave )内的尺度关系,组内相邻层尺度化简为:组间尺度是指不同组直接的尺度关系,相邻组的尺度可化为: 最后可将组内和组间尺度归为:()22221()(),,exp 22i i i i x x y y G x y σπσσ⎛⎫-+-=- ⎪⎝⎭()()(),,,,*,L x y G x y I x y σσ=Octave 1Octave 2Octave 3Octave 4Octave 5σ2σ4σ8σ0()2s S s σσ=0σ=init σ()()2log min ,3O M N ⎡⎤=-⎣⎦112S s s σσ+=1()2s SS o o s σσ++=222s S sS So oσσ+=1212(,,,)i n k k k σσσσ--12Sk =i —金字塔组数 n —每组层数上一组图像的底层是由前一组图像的倒数第二层图像隔点采样生成的。
图像处理特征不变算子系列之DoG算子(五)

图像处理特征不变算子系列之DoG算子(五)时间 2013-09-12 00:24:07 CSDN博客原文/kezunhai/article/details/11403733图像处理特征不变算子系列之DoG算子(五)kezunhai@/kezunhai在前面分别介绍了:图像处理特征不变算子系列之Moravec算子(一)、图像处理特征不变算子系列之Harris算子(二)、图像处理特征不变算子系列之SUSAN算子(三)和图像处理特征不变算子系列之FAST算子(四)。
今天我们将介绍另外一个特征检测算子---DoG算子,DoG算子是由 Lowe D.G. 提出的,对噪声、尺度、仿射变化和旋转等具有很强的鲁棒性,能够提供更丰富的局部特征信息,本文将对DoG算子进行详细地分析。
在开始介绍DoG之前,有必要对尺度空间有一定的了解。
尺度空间最早是由Tony Lindeberg提出的,并不断的发展和完善。
日常生活中,我们自觉或不自觉的在使用尺度的概念。
举个我们个人自觉的经历,当我们读小学的时候,同学间互相询问来自哪个组;当我们读中学的时候,同学们互相询问自哪个村;当我们读高中的时候,同学们互相询问来自哪个镇;当读大学的时候,同学们互相询问来自哪个省?这里的组、村、镇、省就是我们不自觉使用的尺寸。
还有一个例子,当我们打开google地图的时候,随着鼠标的滚动,地图会由五大洲逐渐定位到国家--》省---》市---》区---》街道办等,这也是尺度的表现。
1)尺度空间在尺度空间中,尺度越大图像就越模糊,尺度空间中各尺度图像的模糊程度逐渐变大,能够模拟目标由远及近人对目标的感知过程。
那为什么要讨论尺度空间呢?因为在用机器视觉系统分析未知场景时,机器并不知道图像中物体的尺度,只有通过对图像的多尺度描述,才能获得对物体感知的最佳尺度。
如果在不同尺度上,对输入的图像都能检测到相同的关键点特征,那么在不同尺度下也可以实现关键点的匹配,从而实现关键点的尺度不变特性。
基于红外热成像的PCB故障检测
基于红外热成像的PCB故障检测摘要:常见电路板故障的发生都会伴随着电子元件温度的变化,利用观测到的电路板及电子元件的红外热像图温度变化可以检测电路板的故障以及确定大致的故障位置。
结合电路板元件工作温度变化的特点,结合多种算法研究综合,基于MATLAB GUI建立了一个利用红外热图像分析来检测电路板故障的系统。
关键词:红外热成像;PCB板;故障检测;图像处理0.引言随着电子设备结构和功能的日趋复杂,电子设备的检测诊断技术和设备维护变得越来越困难,针对电子设备的特点有很多电路板的故障检测和诊断方法。
例如传统的在线监测方法,以及专家诊断法错误!未找到引用源。
传统测试方法需要接触电路板上的元件,对待测设备和部件会有一定的影响。
经研究表明,电路板封装元件和组件大多数故障都与温度有关,即我们可以根据检测到的电路板上元件温度的变化异常判断元件故障,此为红外热成像检测电路板故障的前提。
近几年,红外热成像技术发展迅速,其精度已能满足观测普通电路板的需求,再综合多种图像处理技术就能检测出电路板故障的大致区域。
1.红外成像原理红外热成像运用光电技术检测物体热辐射的红外线特定波段信号,将该信号转换成可供人类视觉分辨的图像和图形,并可以进一步计算出温度值。
红外热成像技术使人类超越了视觉障碍,由此人们可以看到物体表面的温度分布状况。
物体表面温度如果超过绝对零度即会辐射出电磁波,随着温度变化,电磁波的辐射强度与波长分布特性也随之改变,波长介于0.75μm到1000μm间的电磁波称为"红外线",而人类视觉可见的可见光介于0.4μm到0.75μm。
照相机成像得到照片,电视摄像机成像得到电视图像,都是可见光成像。
自然界中,一切物体都可以辐射红外线,因此利用探测仪测定目标的本身和背景之间的红外热差并可以得到不同的红外图像,热红外线形成的图像称为热图。
物体的热辐射能量的大小,直接和物体表面的温度相关。
热辐射的这个特点使人们可以利用它来对物体进行无接触温度测量和热状态分析,从而为工业生产,节约能源,保护环境等等方面提供了一个重要的检测手段和诊断工具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
log算子和dog 算子
背景引言
在博文差分近似图像导数算子之Laplace算子中,我们提到Laplace算子对通过图像进行操作实现边缘检测的时,对离散点和噪声比较敏感。
于是,首先对图像进行高斯暖卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测,就可以提高算子对噪声和离散点的Robust, 这一个过程中Laplacian of Gaussian(LOG)算子就诞生了。
本节主要介绍LOG算子基本理论数学分析比较多些,最后,贴出用Mathcad软件实现的LOG代码。
基本理论
高斯卷积函数定义为:
而原始图像与高斯卷积定义为:
因为:
所以Laplacian of Gaussian(LOG)可以通过先对高斯函数进行偏导操作,然后进行卷积求解。
公式表示为:
和
因此,我们可以LOG核函数定义为:
高斯函数和一级、二阶导数如下图所示:
Laplacian of Gaussian计算可以利用高斯差分来近似,其中差分是由两个高斯滤波与不同变量的卷积结果求得的
从两个平平滑算子的差分得出的是二阶边缘检测,反直观。
近似计算可能如下图所示。
图中一维空间,不同变量的两个高斯分布相减形成一个一维算子
参考代码
计算LOG算子模板系数的式(4.27)实现如下代码:
此函数包括一个正规函数,它确保模板系数的总和为1. 以便在均匀亮度区域不会检测到边缘。
参考资料
[1] Laplacian of
Gaussian /e161/lectures/gradient/node9.html.
[2] Rafael C.Gonzalez, RechardE.Woods at. el , "Digital Image Processing Using MatLab (Second Editon)",Gatesamark Publishing.
关于Image Engineering & Computer Vision的更多讨论与交流,敬请关注本博和新浪微博
songzi_tea
DOG算子
分类:【Computer Vision】2013-11-10 15:06 352人阅读评论(0) 收藏举报
计算机视觉图像分析特征检测特征提取DOG算子
目录(?)[+]背景简述
Difference of Gaussian(DOG)是高斯函数的差分。
它是可以通过将图像与高斯函数进行卷积得到一幅图像的低通滤波结果,即去噪过程,这里的Gaussian和高斯低通滤波器的高斯一样,是一个函数,即为正态分布函数。
同时,它对高斯拉普拉斯LoG(博文LOG算子介绍了实现原理)的近似,在某一尺度上的特征检测可以通过对两个相邻高斯尺度空间的图像相减,得到DoG的响应值图像。
基本理论
首先,高斯函数表示定义为:
其次,两幅图像的高斯滤波表示为:
最后,将上面滤波得到的两幅图像g1和g2相减得到:
即:可以DOG表示为:
在具体图像处理中,就是将两幅图像在不同参数下的高斯滤波结果相减,得到DoG图。
具体步骤如下所示:
第一步,计算不同参数下的DOG;
在图1,图2,图3,三种图像给了不同参数下的高斯滤波输出的效果,如下图所示:
图1:一个高斯平滑参数为0.3,另一个高斯平滑参数为0.4
图2:一个高斯平滑参数为0.6,另一个高斯平滑参数为0.7
图3 :一个高斯平滑参数为0.7,另一个高斯平滑参数为0.8
第二步,根据DOG,求角点。
根据理论:三维图中的最大值和最小值点是角点,如图所示(此图片来源于自网络):
标记红色当前像素点,绿色的圈标记邻接像素点,用这个方式,最多检测相邻尺度的26个像素点。
如果它是所有邻接像素点的最大值或最小值点,则标记红色被标记为特征点,如此依次进行,则可以完成图像的特征点提取。
因此在第一步后,我们可以计算出的图1,图2,图3三个DOG图中求图2中是极值的点,如下图所示:
图5:黑色为极小值,白色为极大值因此,原始图像上以显示的DOG角点检测结果,如下图所示:。