基于无线传感器网络的采样算法
无线传感器网络目标跟踪算法的研究

12 一 2
2 无线 传感 器 网络 目标跟 踪
2 1 网 络模 型 .
进行估计 和更新 的过程 , 而获得 最小 方差估 计 , 从 这些样 本
称 之 为 “ 子 ” ] 粒 [ 。
无线传感 器网络所 有节 点地位 平 等 。 严格 控制 中心 , 无
单个传感器节 点能力有限无法有效地 跟踪 目标 , 需要 多个传
本文对 网络监测 区域 只有一 个运动 目标 的跟踪研究 . 对 于运动 目标 , 在非常短时间内其移动速度 可 以近似认 为是匀 速的 。设 目标 的初始位置为 :% , ) 那么 目标下一 时刻位 ( Y , o 置可 以通过下式可 以得 到 :
集, 构造集合 { k i , ( ,) i=1 2 … , , , , Ⅳ}并对粒 子的权值 进行 重 新设 置 , 否则 , ( i ( j } ,) i= , , Ⅳ‘。
跟踪两种 , 目前主要集 中于单 目标跟 踪研究 。S dr i a 等人 采 k 用线性预测方法对无线传感 器 目标位置进 行预测 , 而对 目 从
基金项 目:0 8年度江苏 省高校科 研成果 产业化 推进项 目( Z 8 20 HD 0 —
5 61
的无线传感器 目标跟踪 [ 。S eg等提出了粒子滤波 的 目标 7 hn ] 跟踪算法 , 少 目标 跟踪 误差 。粒子 滤 波算 法在 应 用 过程 减 中. 存在 粒子 退 化 现 象 , 而 影 响无 线 传 感 器 目标 跟 踪 精 从
W k ‘
一
感器节点 协作 采集数 据 , 因此 目标跟 标之 前 , 传感 器节 点形
成一种 网络拓 扑结 构 ] 。本 文采 用无 线网络拓扑结构为簇 一 树型 。设无线传感 器节点随机分布于监 测区 内, 基站位 于网 络监测 区边缘 , 网络 监测 区被划 分多 个子 区域 , 每个 子 区域
一种基于无线传感器网络的RF定位算法研究
估测。对 于 G S而 言 , P 不适用 于室 内环 境 的定 位 , 而且 产 生的费用 相当大。后者虽然便宜 , 是精 度又太低 。 但
对 于 基 于 接 收 信 号 强 度 指 示 (ee e i a s eg rci d s n l t nt v g r h i i t n R S) 定 位 , 经 有 了 一 些 方 法 来 解 决 。 B — n c i ,SI的 d ao 已 u
上 下 幅 度 变 动 非 常 大 , 如果 2个 锚 节 点 之 间 的距 离 太 远 , R S 对 于 真实 值 也 会 相 距 甚 远 。 所 以 , 取 了 4个 “ 近 SI 选 最
—
厂——
糯的步 长L和 新 的超 始点
Y
=一
计 f 算
匝麴
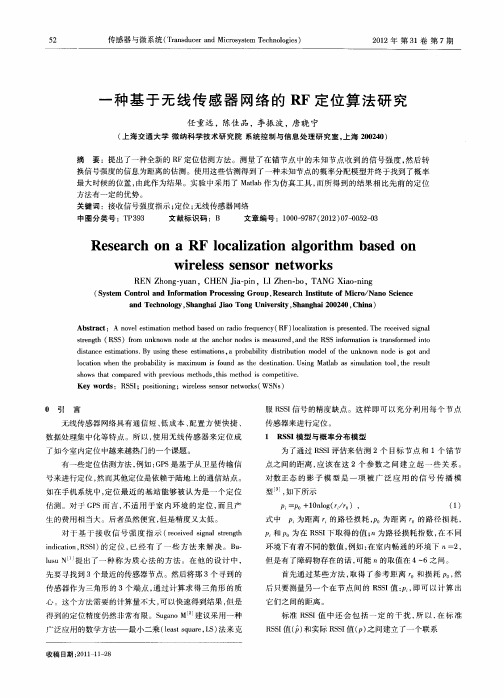
图 1 运算法则的流程 图
s e g ( S )f m u k o n n d t h n h r o e e s r ,n e S fr a o a s r dit t n t R S r n n w o ea tea c o n d s s aue a d t Si om t ni t nf me o r h o im d h R n i sr o n
P = 0 0 l (i 0 = +1no r r), p g / () 1
有一些定位估测方法 , 例如 : P G S是基于从卫星传输 信
号来进行定位 , 然而其他定位是依赖 于陆地上 的通信站点 。
如 在 手 机 系统 中 , 位 最 近 的 基 站 能 够 被 认 为 是 一 个 定 位 定
度 而设 定相 应 的 步长 £ 。在 这 些 反 复 的计 算 中 , 到 了4个 得
3 实 验 和 结 果
无线传感器网络中TOF测距算法

无线传感器网络中TOF测距算法在无线传感器网络<W ire less Sensor Network, WSN >中节点的准确定位对传感器网络应用具有重要的意义.根据定位过程中是否测量实际节点间的距离,可将定位算法划分为与距离无关的定位算法和基于距离的定位算法.与距离无关的如质心算法,凸规划法, DV2Hop算法, APIT算法等,其特点是定位简单, 对节点硬件条件要求低, 但定位精度较差;基于距离的定位算法包括基于信号飞行时间时间< TOF>, 基于到达时间差< TDOA >,基于到达角度<AOA >,基于信号接收强度< RSS的定位算法等等.通常来说,它们对节点硬件要求较高,能耗较大,但具有较高的定位精度.基于测距的方法定位是利用锚节点和未知节点的几何关系来确定未知节点的位置,通过未知节点与三个或三个以上的锚节点距离信息,再根据三边测量法或最大似然估计法可以求得未知节点的位置.所以其关键是准确测量出未知节点与锚节点的距离,本文主要分析TOF的测距方法.1 测距算法基于信号飞行时间的测距算法有:到达时间法< TOA,time of arrival >、双方式法< TWR,tow way ranging >、对称双边双方式法< SDS-TWR,symmetric double-sided two way ranging>等.1.1 TOA算法一对装有无线收发器的节点A、B可以通过电磁波信号从A传播到B 所用的时间来估算.图1为到达时间法的信号传播示意图.设移动节点A在双方约定的时刻发出测距信息,节点A在发送的信号中包含一个同步消息,告知节点B信号发送的时间T0,节点B接受信号的同时接收同步消息,并记录接收时间T1,则信号飞行时间Tp=T1-T0.设电磁波在大气中传播速度为C< 3>,飞行时间为Tp,节点A与B的距离可以估算为S=C TpTOA测距的关键是节点A与节点B时间必须要严格同步.电磁波的速度为3m/s,如果双侧时钟误差为1ns,测量距离误差即为0.3m.如果要求测距误差为1m,则允许双侧的时钟误差不超过3ns.TpA B考虑到当A到达T0时刻时,节点A将包含发送时刻T0的数据包调制到信号波上的时间为T,时间T为一个可测常量,故实际信号飞行时间Tp实=T1-T0-T实际距离S=C Tp实.TOA的误差主要来源于A,B节点时间不同步的误差和B节点晶振频率漂移导致计时时间T1不准的误差.可以选择频率高稳定性高的晶振来减小频率漂移的误差,但相对的能耗和费用就会增加.下面分析频率漂移带来的误差.在节点A,B同步的条件下,假设B的精准时钟脉冲频率为f,实际晶体因为制造工艺,环境温度变化等因素影响下,频率漂移为f,即实际频率为=f+ f其f为一个随时间变化的随机量.则实际测量的时间为=t<1+ >由此可知由于频率漂移使得测量时间与实际时间的误差为t .1.2 TWR算法图2为TWR法的信息交换示意图.节点A发出测距信息,同时启动计时器计时,经过Tp后节点B收到信息,但由于双侧时钟不同步,节点B无法确认Tp.节点B收到信息后立即启动计时,若收到的是本方的测距命令后,则向节点A发出应答信息<信息中包含本方处理时间设为T2>,节点A在<2Tp+T2 >时间后收到应答信息后终止本轮计时.一轮测距所以往返时间为T1T1=2Tp+T2对于节点B,T2为可测常量,因此有飞行时间Tp=ABT1 T2图2TWR测距原理图A与B间的距离S仍然是S=C Tp.可以看出本方法不需要A,B间的时间同步,但是需要A,B分别使用本方的时钟计时,若A,B两侧时钟频率有偏差,将会导致误差,设A,B两侧晶体频率的误差为e A和e B<e=>,可以求得其导致的计时误差为T=e A Tp+<e A -e B >T2由于A,B 间信号飞行时间远小于数据包处理时间,故可以省去上式第一部分得到的误差为T=<e A -e B >T21.3 SDS-TWR 算法为了避免双方式方法中A,B 晶体频率误差引起的计时误差,引入SDS-TWR 算法.如图3所示,A 对B 发起一轮TWR 后,B 再对A 发起一轮TWR,由此可以看出信号飞行四次.T1,T3分别为A,B 所计时的一轮测距所用往返时间,T2,T4为A,B 处理数据的时间,得到的单次飞行时间为 Tp=<T1-T2+T3-T4>图3 SDS-TWR 测距原理图 与TWR 相比,此为两次TWR 法测距,一次由A 发起,另一次由B 发起,由B 发起的测距,引起的计时误差为=<e B -e A >T4所以两次测距的总误差为T 总=<T+>= <e A -e B ><T2-T4>对比TOA 和TWR 可以看出,SDS-TWR 大大降低了由晶体震荡频率的漂移所引起的误差.2测距误差分析T1 A T4 T2BT3对于TOF的测距来说,距离测量误差主要来源于系统误差和非视距与多径效应.系统误差主要是飞行时间的测量误差,如前面所讲的晶振频率漂移带来的误差就属于系统误差.如前面所示,SDS-TWR相比TOA和TWR够很好的克服频率漂移带来的误差.非视距与多径效应带来的误差主要是由于环境障碍物的影响,会使A,B间的信号传播会经过反射,散射,衍射,而不是直线传播,这就导致所测量的A,B间的距离并非直线距离,而是大大超过直线距离.在空旷的室外地区,系统误差是影响测量精度的主要因素,在室内或环境复杂地区,非视距和多径效应是主要因素.目前已有的消除非视距误差的方法分为直接法和间接法.直接法是直接对测量值来处理,来消除误差的.一般是基于先测量出本地区的非视距的统计特性,找出带有误差的测量值与真实值之间的关系,再通过对测量值得预处理,将其恢复真实值.间接法是将消除非视距误差与定位过程相结合,通过设计定位算法,减小非视距在定位过程的影响.一般间接法需要较多基站参与,由多种基站组合得到多种定位结果.然后根据一定的判定准则,舍去由于非视距误差而不准确的结果,或者对所以定位结果加权平均,加权系数与定位准确度有关.3 测距的花费和能耗问题在TOF三种测距方法中,TOA测量移动节点A和主节点B间的距离,只需一次通信即可,而TWR需要发送两次信号,SDS-TWR需发送四次信号,很明显TWR和SDS-TWR测距所耗的能量较多,如果对于移动节点进行实时定位的话,通信频率会大大增加,TWE和SDS-TWR的能耗也会大大增加,故对实时性要求较高的移动节点定位比较适合于用TOA法. TOA测距需要严格要求节点间的时间同步,这就要求选用频率高,稳定性非常好的晶振,而且还要通过不断地通信校正时间误差,这对整个网络来说花费较大.TWR和SDS-TWR不需要节点间的时间同步,相对来说花费较小.。
无线传感器网络(WSN)的应用与优化

无线传感器网络(WSN)的应用与优 化
CREATE TOGETHER
DOCS
01
无线传感器网络(WSN)概述
无线传感器网络的基本概念与组成
WSN的主要组成部分包括传感器节点、汇聚节点和数据中心
• 传感器节点:包含传感器、数据处理单元和无线通信模块 • 汇聚节点:包含数据处理单元、无线通信模块和有线通信接口 • 数据中心:包含数据库、数据处理软件和用户界面
无线传感器网络(WSN)是一种由大量传感器节点组成自组织网络
• 传感器节点:负责数据采集和处理和传输 • 汇聚节点:负责接收和处理传感器节点的数据,并将数据传输到数据中心 • 数据中心:负责存储、分析和处理传感器网络收集的数据
无线传感器网络的发展历程与趋势
无线传感器网络的发展历程可以分为三个阶段
05
无线传感器网络(WSN)未来发展趋势与挑战
可扩展性与自适应性问题
无线传感器网络的可扩展性和自适应性问题是指网 络在节点数量增加和环境影响下的性能变化
• 可扩展性:随着传感器节点数量的增 加,网络应能保持良好的性能 • 自适应性:网络应能根据环境参数的 变化自动调整参数和策略,提高网络的 适应性和稳定性
• 无线传感器网络的网络协议包括MAC协议、路由协议和数据传输协议等 • MAC协议:负责传感器节点之间的无线通信,如CSMA/CA、TDMA和FDMA等 • 路由协议:负责传感器节点与汇聚节点之间的数据传输路径选择,如Dijkstra、LEACH和PEGASIS等 • 数据传输协议:负责传感器节点与汇聚节点之间的数据传输,如HTTP、CoAP和MQTT等
• 数据融合技术包括基于时间、空间和概率的数据融合方法等 • 基于时间的数据融合:通过对同一传感器节点在不同时间采集的数据进行融合,提高数据的准确性和稳定性 • 基于空间的数据融合:通过对不同传感器节点在相同时间采集的数据进行融合,提高数据的覆盖范围和准确性 • 基于概率的数据融合:通过对不同传感器节点的数据进行概率加权融合,提高数据的可靠性和稳定性
无线传感器网络APIT定位算法

随着计算机网络技术、通信技术、嵌入式技术和传感器技术的飞速发展和日益成熟,具有感知能力、计算能力和通信能力的微型传感器及其构成的无线传感器网络WSN(Wireless Sensor Network)引起了人们的极大关注。
这种传感器网络具有低功耗、低成本、自组织的能力,能够自动进行配置和适应环境的变化,具有动态可重构性等特点,能够通过协作实时监测、感知和采集网络,分布区域内的各种环境或监测对象的信息并传送到控制中心,因而被广泛应用于国防军事、国家安全、精细农业、环境监测、智能家居、城市交通以及预防与减灾、人员营救、目标跟踪等方面,适用于在人们无法接近的极端恶劣或特殊环境下监测事件发生的地点[1]。
传感器节点通过飞行器撒播、人工埋置和火箭弹射等方式任意撒落在被监测区域内。
节点的位置信息都是随机的,节点所采集到的数据,若没有位置信息几乎没有应用价值[1]。
所以在无线传感器网络应用中,节点的定位一直是关键问题,同时也是人们研究的热点。
由于传感器节点采用电池供电,节点数量巨大,成本太高,能量有限。
因而利用GPS或其他方式先对网络中的少量节点(锚节点)进行定位,其他大部分节点以锚节点位置为参考,应用各种定位算法实现自身定位。
根据目前出现的定位算法对节点位置估测机制的不同可以分为两大类:基于距离相关的定位算法(Range-Based Localization Schemes)和基于距离无关的定位算法(Range-Free Localization Schemes)。
前者需要测量相邻节点间的绝对距离或方位,并利用节点间的实际距离来计算未知节点的位置;后者不需要自己与锚节点之间的距离或角度信息,而是根据网络连通性等信息估算出自己与锚节点间的距离。
基于距离相关的定位算法使得传感器节点造价增高,消耗了有限的电池资源,而且在测量距离和角度的准确性方面需要大量的研究。
基于距离无关的定位算法则不需要知道未知节点到锚节点的距离或者不需要直接测量此距离,在成本和功耗方面比基于测距的方法具有优势[1]。
一种针对无线传感器网络的 WNDV-HOP 算法

一种针对无线传感器网络的 WNDV-HOP 算法刘红庆【期刊名称】《计算机应用与软件》【年(卷),期】2013(000)012【摘要】在分析无线传感网络的基础上,对传统DV-Hop定位算法进行研究,发现DV-Hop定位算法在平均每跳距离计算对实际距离的影响较大。
提出基于无线传感网络的WNDV-HOP(A Weighted N-anchor Algorithm Based on DV-Hop)算法。
该算法采用信标节点校正了平均每跳距离、采用未知节点对估计坐标进行迭代求精,并在节点随机分布和网格随机分布2种网络拓扑环境下对算法进行实验仿真。
仿真实验表明该算法在定位精度和算法稳定性方面的性能都明显优于传统DV-Hop算法。
%Based on the analysis of wireless sensor network , we study the traditional DV-Hop algorithm, and find that in DV-Hop positio-ning algorithm the average hop distance calculation has big influence on actual distance .In this paper we propose a WSN-based WNDV-HOP ( a weighted n-anchor algorithm based on DV-Hop) algorithm.The algorithm uses beacon node to correct the average distance per hop , adopts unknown node to carry out the iterative refinement on estimate coordinates .Experimental simulation on the algorithm is conducted in two kinds of network topologic environments including random distribution of nodes and random distribution of grid , it demonstrates that the performance of the algorithm is superior to thetraditional DV-Hop algorithm in aspects of positioning accuracy and algorithm stability .【总页数】4页(P288-290,302)【作者】刘红庆【作者单位】湖南现代物流职业技术学院湖南长沙410131【正文语种】中文【中图分类】TP393【相关文献】1.一种针对无线传感器网络LEACH协议的改进算法 [J], 石闪;施伟斌;朱蓓2.LC-MAC:一种针对长链拓扑的无线传感器网络MAC协议 [J], 王耿初;方晨;刘昊3.一种针对无线传感器网络LEACH协议的改进算法 [J], 孙建伟;王绍辰;贾军营4.一种针对无线传感器网络能量洞的节点分布策略 [J], 马礼;童莉;马东超5.一种基于遗传算法与蚁群算法混合算法的r无线传感器网络定位算法 [J], 李杰;李振波;陈佳品因版权原因,仅展示原文概要,查看原文内容请购买。
无线传感器网络中的定位算法研究

a et l q a t o eosrao eut oe lct net a o l rh a e U Dw s n ou e ntebs f c dte uly fh be t nrs .A nvloai s m t na oi m nm dI A a t d cdo ae e l i t v i l o i i g t Q ir h o U D oui ntelctno en d h ntet ooyo entok hne .B erl a o c ai f A ,f s go a o fh o ew e plg f h e rscagd yt o t nmehns t Q c n h o i t h o t w h e i c m,i ’
MA Xa —i ,Z A njn ioxa o H 0 A - ,MA G a gs u u n ~ i
(colfI o t na dC nrl nleH g Sh o o n r i n o t gne n ,瓜’nU i n yo r icuea eh o g ,Xia h a x7 0 5 ,C ia f ma o oE a nv h c t tr n Tcnl y ’ nS a ni 10 5 hn ) e fA h e d o
R neB e 定 位通过测 量节 点间点 到点的距离或角 度信息 , ag— a d s 使用三边测量 、 三角测量或最 大似然估 计定位 法计算 节点位 置, 常用 的测 距 技 术 有 R S, O T O 和 A A。相 对 于 S IT A, D A O R neFe 类型 的算法 , ag-ae 型算法 的优点 在于定 ag.re R n eB d类 s 位精确度较高 , 对后期的数据处理能够做出更大贡献 ; 缺点 是
基于RSSI的无线传感器网络三角形质心定位算法
引言无线传感器网络是面向事件的监测网络,对于大多数应用,不知道传感器位置而感知的数据是没有意义的。
实时地确定事件发生的位置或获取消息的节点位置是传感器网络最基本的功能之一,也是提供监测事件位置信息的前提,所以定位技术对传感器网络应用的有效性起着关键的作用。
在无线传感器网络中,按节点位置估测机制,根据定位过程中是否测量节点间的实际距离或角度,可分为基于距离(Range—based)的定位算法和距离无关(Range—free)的定位算法。
前者需要测量节点间的实际距离;后者是利用节点间的估计距离来计算末知节点的位置。
在基于距离的定位算法中,测量节点间距离或方位时采用的方法有TOA(Time of Arrival),TDOA(Time Difference of Arrival),RSSI(ReceivedSignal Strength Indication)和AOA(Angle of Arri—val)。
距离无关的算法主要有质心算法、DV—hop算法等。
相比之下,基于距离的定位算法测量精度较高,距离无关的定位算法对硬件要求较低。
比较各种基于距离的测距算法,TOA需要精确的时钟同步,TDOA需要节点配备超声波收发装置,AOA需要有天线阵列或麦克风阵列,这三种算法对硬件要求较高。
RSSI技术主要是用RF信号,而节点本身就具有无线通信能力,故其是一种低功耗、廉价的测距技术。
接收信号强度指示RSSI的定位方法,是在已知发射节点的发射信号强度,根据接收节点收到的信号强度,计算出信号的传播损耗,再利用理论和经验模型将传输损耗转化为距离,最后计算节点的位置。
因为理论和经验模型的估测性质,故而RSSI具有较大定位误差。
基于RSSI技术,提出一种将RSSI测量方法与三角形质心算法相结合的新型定位算法,该算法用三角形质心算法减小RSSI的测量误差。
仿真表明,该算法基于RSSI的三边测量法定位算法相比,极大提高了定位精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 基于无线传感器网络的采样算法 1.无线传感器网络的研究背景及应用现状 1.1 研究背景 无线传感器网络(Wireless Sensor Network,简称WSN) 的基本功能是将一系列在空间上分散的传感器单元通过自组织的无线网络进行连接,从而将各自采集的数据进行传输汇总,以实现对空间分散范围内的物理或环境状况的协作监控,并根据这些信息进行相应的分析和处理。因具有成本低、范围大、布设灵活、移动支持等特点,无线传感器网络在工业监控、智能电力、矿山安全、医疗健康、环境监测等行业的应用一直广受重视;与此同时,无线传感器网络也面临着延长节点工作时间、增加通信距离、小型化、标准化等技术挑战和寻找应用场景等市场挑战。无线传感器网络的研究经历了以下四个阶段: (1)第一代传感器网络:20世纪70年代。点对点传输,具有简单信息获取能力。 (2)第二代传感器网络:获取多种信息的综合能力,采用串/并接口与传感控制器相联。 (3)第三代传感器网络:20世纪90年代后期。智能传感器采用现场总线连接传感控制器构成局域网络。 (4)第四代传感器网络:以无线传感器网络为标志,正处于研究和开发阶段。 近年来,无线传感器网络引起了业界极大关注,其应用环境通常是由价格便宜的传感器节点组成的,每个节点都能够采集、存储和处理环境信息,并且能和邻居节点通过无线链路保持通信。覆盖问题是无线传感器网络配置首先面临的基本问题,因为传感器节点可能任意分布在配置区域,它反映了一个无线传感器网络某区域被监测和跟踪的状况。随着无线传感器网络应用的普及,更多的研究工作深入到其网络配置的基本理论方面,其中覆盖问题就是无线传感器网络设计和规划需要面临的一个基本问题之一。随着深入研究的角度不同,覆盖问题也表述成不同的理论模型,甚至在计算几何里面就能找到与覆盖相关的解决方案。尽管这些办法并不能直接应用到无线传感器网络2
中,但是研究这些问题有助于建立读者对无线传感器网络覆盖问题相关的理论背景。 1.2 无线传感器网络的应用现状 虽然无线传感器网络的大规模商业应用,由于技术等方面的制约还有待时日,但是最近几年,随着计算成本的下降以及微处理器体积越来越小,已经为数不少的无线传感器网络开始投入使用。目前无线传感器网络的应用主要集中在以下领域: (1)环境的监测和保护 随着人们对于环境问题的关注程度越来越高,需要采集的环境数据也越来越多,无线传感器网络的出现为随机性的研究数据获取提供了便利,并且还可以避免传统数据收集方式给环境带来的侵入式破坏。比如,英特尔研究实验室研究人员曾经将32个小型传感器连进互联网,以读出缅因州"大鸭岛"上的气候,用来评价一种海燕巢的条件。无线传感器网络还可以跟踪候鸟和昆虫的迁移,研究环境变化对农作物的影响,监测海洋、大气和土壤的成分等。此外,它也可以应用在精细农业中,来监测农作物中的害虫、土壤的酸碱度和施肥状况等。 (2)医疗护理 无线传感器网络在医疗研究、护理领域也可以大展身手。罗彻斯特大学的科学家使用无线传感器创建了一个智能医疗房间,使用微尘来测量居住者的重要征兆(血压、脉搏和呼吸)、睡觉姿势以及每天24小时的活动状况。英特尔公司也推出了无线传感器网络的家庭护理技术。该技术是做为探讨应对老龄化社会的技术项目Center for Aging Services Technologies(CAST)的一个环节开发的。该系统通过在鞋、家具以家用电器等家中道具和设备中嵌入半导体传感器,帮助老龄人士、阿尔茨海默氏病患者以及残障人士的家庭生活。利用无线通信将各传感器联网可高效传递必要的信息从而方便接受护理。而且还可以减轻护理人员的负担。英特尔主管预防性健康保险研究的董事Eric Dishman称,"在开发家庭用护理技术方面,无线传感器网络是非常有前途的领域"。 (3)军事领域 3
由于无线传感器网络具有密集型、随机分布的特点,使其非常适合应用于恶劣的战场环境中,使其非常适合应用于恶劣的战场环境中,包括侦察敌情、监控兵力、装备和物资,判断生物化学攻击等多方面用途。美国国防部远景计划研究局已投资几千万美元,帮助大学进行"智能尘埃"传感器技术的研发。哈伯研究公司总裁阿尔门丁格预测:智能尘埃式传感器及有关的技术销售将从2004年的1000万美元增加到2010年的几十亿美元。 (4)其他用途 无线传感器网络还被应用于其他一些领域。比如一些危险的工业环境如井矿、核电厂等,工作人员可以通过它来实施安全监测。也可以用在交通领域作为车辆监控的有力工具。此外和还可以在工业自动化生产线等诸多领域,英特尔正在对工厂中的一个无线网络进行测试,该网络由40台机器上的210个传感器组成,这样组成的监控系统将可以大大改善工厂的运作条件。它可以大幅降低检查设备的成本,同时由于可以提前发现问题,因此将能够缩短停机时间,提高效率,并延长设备的使用时间。 尽管无线传感器技术目前仍处于初步应用阶段,但已经展示出了非凡的应用价值,相信随着相关技术的发展和推进,一定会得到更大的应用。但就目前的技术水平来说,让无线传感器网正常运行并大量投入使用还面临着许多问题: (1)网络内通信问题。无线传感器网络内正常通信联系中,信号可能被一些障碍物或其他电子信号干扰而受到影响,怎么安全有效的进行通信是个有待研究的问题。 (2)成本问题。在一个无线传感器网络里面,需要使用数量庞大的微型传感器,这样的话成本会制约其发展。 (3)系统能量供应问题。目前主要的解决方案有:使用高能电池;降低传感功率;此外还有传感器网络的自我能量收集技术和电池无线充电技术。其中后两者备受关注。 (4)高效的无线传感器网络结构。无线传感器网络的网络结构是组织无线传感器的成网技术,有多种形态和方式,合理的无线传感器网络可以最大限度的利用资源。在这里面,还包括网络安全协议问4
题和大规模传感器网络中的节点移动性管理等诸多问题有待解决。 2. 无线传感器网络相关技术 2.1无线传感器网络节点构成 无线传感器网络由大量体积小、成本低、具有无线通信、传感、数据处理的传感器节点以自组织方式构成。传感器节点构成了网络的硬件基础。节点具备三个功能:首先,作为现场信息采集单元要完成信息的采集并按要求对采集到的信息进行适当的预处理,因此节点包括数据采集模块及数据预处理模块;其次,传感器节点还具有信息转发功能,将采集到的现场信息通过一定的方式传输到其他节点或信息处理中心,因此节点还必须包括通信模块来完成信息的接收、传递等;第三,当节点处要实现某种控制作用时,还需要有控制模块。一般来说,无线传感器节点由以下几个物理部分构成: (1)由微处理器或微控制器构成的计算子系统,负责控制传感器、执行通信协议及处理传感数据的算法; (2)用于无线通信的短距离无线收发电路,即通信子系统; (3)由一组传感器和激励装置构成的传感子系统。 实际应用中,并不是所有的节点都需要控制模块。传感器节点的一种基本模型如图2-1所示。包括传感器、ADC、CPU及存储器、通信模块、控制模块及电源(能量)等,当不需要控制作用时,节点组成如图2-1中粗线内部分所示。所有这些模块组装成一个火柴盒大小甚至更小的传感器节点,各模块相互协作以完成一项共同的任务。
图2-1 传感器节点基本模型 控制模块控制器
通信模块无线收发数据处理模块微处理器存储器采集模块
传感器
ADC
供电模块电池DC/DC5
除此之外,根据具体应用的需要,节点可能还会有定位系统、电源再生单元和移动单元等。其中电源再生单元是重要的模块之一,有的系统可能采用太阳能电池等方式来补充能量,但是大多数情况下传感器节点的电池是不可补充的。定位系统对传感器网络的路由是很重要的,有些传感器节点采用GPS进行定位,但是GPS模块价格昂贵且体积难以减少,所以不可能全部节点都使用GPS来进行定位。此外,GPS定位还受到其他限制,如网络放置于建筑物内部等。通常情况下是在整个网络中会有某些传感器节点配有GPS系统,其他节点通过局部定位算法得到它们与配有GPS的节点之间的相对位置,这样所有节点都能知道各自的具体位置了。除借助GPS的定位方式外,还有离散梯度法等间接定位方式。 无线传感器网络中的节点不但要完成信息的采集、传输、预处理等,有时还涉及到较为复杂的任务调度及管理,因此在传感器网络中节点还可能带有嵌入式操作系统以进行更有效的管理,嵌入式操作系统可以是通用的如uCOS—II等,也可以是专门针对传感器网络开发的操作系统,如UC Berkeley开发的TinyOS。 目前,无线传感网络的节点设计主要有两种方法:一种是利用市场上可以获得的商业元器件构建传感器节点,如围绕TinyOS项目设计的系列硬件平台;另一种方法是采用MEMS和集成电路技术,设计包含微处理器、通信电路、传感器等模块的高度集成化传感器节点,如Smart Dust、WINS等。 2.2 无线传感器网络体系结构 无线传感器网络体系结构如图2-2所示,传感器网络通常包括传感器节点,汇聚节点和管理节点。传感器节点任意的分布在某一监测区域内,节点以自组织的形式构成网络,通过多跳中继方式将监测数据传送到汇聚节点,最后通过Internet或其他网络通讯方式将监测信息传送到管理节点。同样的,用户可以通过管理节点进行命令的发布,告知传感器节点收集监测信息。